
Horizon.KOM: A First Step Towards an Open Vehicular Horizon
Provider
Daniel Burgstahler, Christoph Peusens, Doreen Boehnstedt and Ralf Steinmetz
Multimedia Communications Lab (KOM), Technische Universit
¨
at Darmstadt, Darmstadt, Germany
Keywords:
ADASIS, Electronic Horizon, Most Probable Path, Tree-structure, Horizon Size Determination, Traffic
Information, Open Street Map.
Abstract:
Modern vehicles are commonly equipped with several sensors to gather information about the direct environ-
ment. Due to the physical limitation of these sensors, the detection range and field of view are limited to the
direct vicinity. This limits the functionality of driver assistance systems. A way to overcome this issue is to
use digital road maps to generate a so called electronic horizon as virtual sensor about the environment ahead.
All known electronic horizon providers are closed source and owned by companies. In the work at hand we
present our concept of an electronic horizon provider that we have published as open source.
1 INTRODUCTION
Modern vehicles are equipped more and more with
assistance systems to increase comfort, economy and
safety. These systems are based on sensors that ob-
serve the vehicle’s environment. However, all sensors
are limited in terms of sensing range and view an-
gle. The environment behind other objects, as well
as in a larger distance is commonly not visible. De-
veloping new applications, serving advanced tasks
in a more complex environment, raises the desire
of an extended view. The Adaptive Front Lighting
(AFL) (Durekovic et al., 2011) can serve as example.
It adjusts the headlight alignment to achieve an opti-
mal illumination of the road. Assuming knowledge
about the road geometry, algorithms can be applied
to determine vehicle parameters and settings, which
lead to a decreasing energy consumption while main-
taining the same overall speed and comfort. A com-
mon technology to provide an extended view is to use
a so-called electronic horizon (eHorizon), that pro-
vides information about the road network ahead of
a vehicle. An according illustration is given in Fig-
ure 1. It enables applications to perceive the road
geometry, including additional information, with an
increased range and field of view. However, to the
best of our knowledge all existing implementation for
such a eHorizon provider are closed source and part of
comercial products. We have developed a model that
extracts relevant road information from a digital map
and provides those to other applications. We name
Figure 1: Example illustrating the eHorizon.
our solution Horizon.KOM and provide the source
code to the community. We will start with a short
introduction of the ADASIS specification, which is
used for the standardized distribution of road infor-
mation via a vehicle on board data bus. Afterwards
we will compose our model including several com-
ponents such as the dynamic data storage, data pro-
cessing, and most probable path prediction. The pur-
pose and tasks of each module will be explained in
detail supported by visual examples. At the end of
this paper we will prove the feasibility of our model
by introducing a prototype implementation using an
android operated mobile device and road maps from
the OpenStreetMap project.
2 RELATED WORK
As mentioned before we make use the ADASIS speci-
fication (Ress et al., 2005; Ress et al., 2008), in partic-
ular version 2. It was designed for Advanced Driver
Assistance Systems (ADAS) in order to transmit rel-
Burgstahler, D., Peusens, C., Boehnstedt, D. and Steinmetz, R.
Horizon.KOM: A First Step Towards an Open Vehicular Horizon Provider.
In Proceedings of the International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2016), pages 79-84
ISBN: 978-989-758-185-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
79
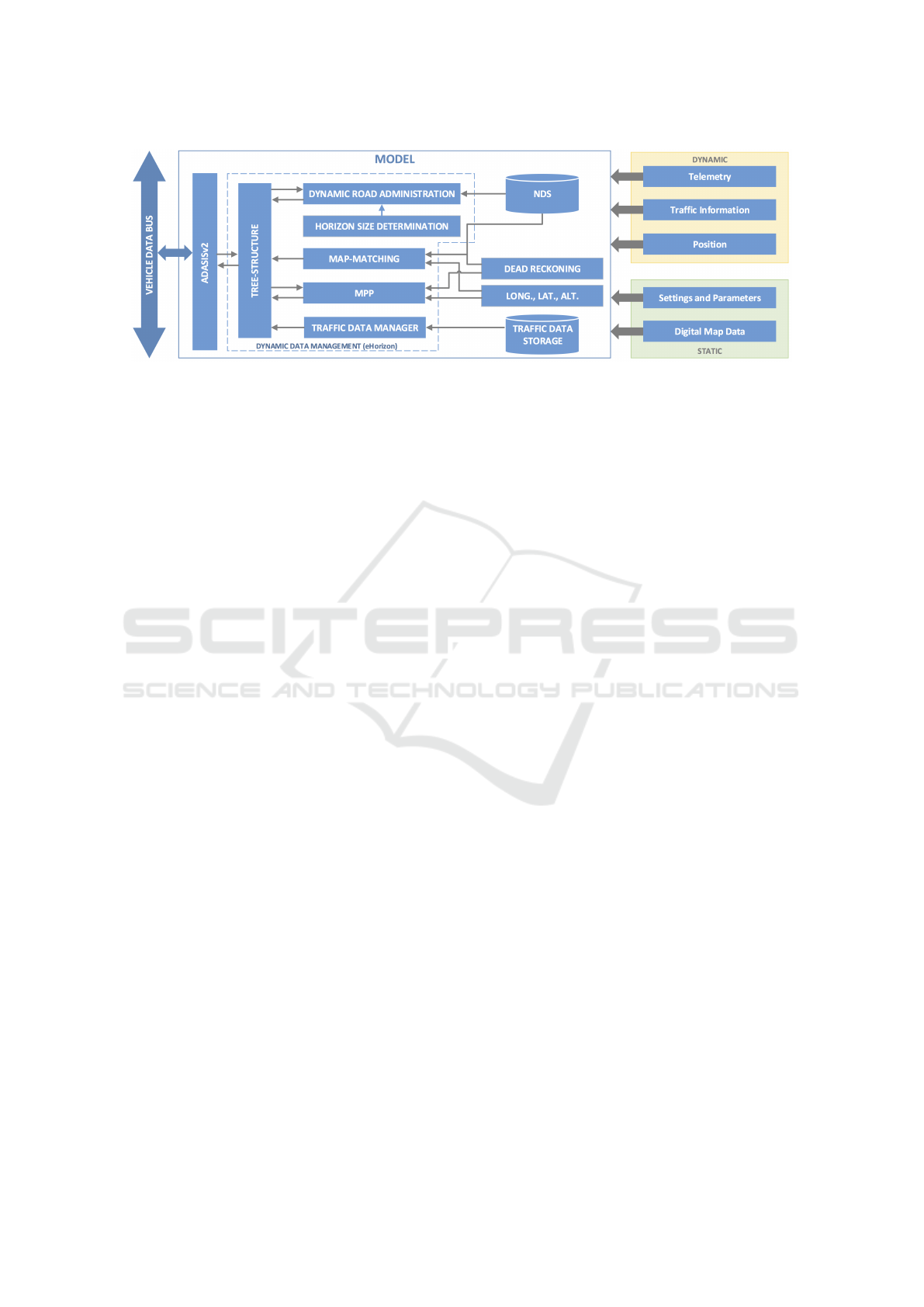
Figure 2: Schematic illustration of the dynamic data management structure.
evant road information via a vehicle data bus. In this
manner our Horizon.KOM will be considered as an
ADAS eHorizon provider, and connected clients will
be denoted as ADAS application.
• The ADAS Horizon knows the vehicles current
position, velocity and driving direction. It also has
access to at least one digital road map. Using this
information, the ADAS Horizon will construct a
digital eHorizon holding all relevant information
about the road network ahead of the vehicle.
• An ADAS Application can decode and recon-
struct the transmitted eHorizon, by implementing
a so called ADASIS Reconstructor. This enables
the application to use information about the road
network ahead of the vehicle without the con-
straint of implementing its own eHorizon based
on a locally stored digital road map.
ADASISv2 supports 4 different modes of operation
determining the amount of data which will be trans-
fered. Mode 0 only transmits data about the Most
Probable Path. Information regarding alternative
routes or intersections along this path is excluded.
Mode 1 adds additional data about the so-called Stubs
along the MPP. Stubs denote intersections, including
first curvature values. Mode 2 extends mode 1 by
adding information about intersecting road segments
along the MPP, excluding second level intersections.
Mode 3 considers the entire road network and has no
restrictions in therms of maximum levels and inter-
sections. Each road segment is represented as a one
dimensional line and is free of absolute geographical
coordinates. Each segment representation has a fixed
length and includes curvature values, denoted with
offset values from zero to segment length, to preserve
the road shape information. The maximum length of
each segment is given by 8190m (13 Bit). A road seg-
ment from the digital map exceeding this maximum
length has to be split. The current position of the vehi-
cle is given by an offset value along the currently used
road segment. Similar notation applies to all values
that are bound to an fixed geographical position. On
the provider side two parameters determine the eHori-
zon size. A value for the Maximum Length of Trans-
mitted Path gives a maximum offset threshold, a value
for Current Length of Transmitted Path describes the
maximum offset of data that has already been sent.
ADASISv2 incorporates 7 message types which are
used to operate the data transmission. The POSITION
Message is used to distribute the vehicles current po-
sition and velocity. It includes a reference to the cur-
rently used road segment. Using the SEGMENT Mes-
sage, information about road segments are transmit-
ted, including the road type, speed limits or other at-
tributes. STUB Messages are sent to provide infor-
mation about intersections and connecting road seg-
ments. The PROFILE Message is used to define the
profile type of a segment, which can either be discrete,
linear or non-linear. The ATTACHMENT Message
contains information about special elements of the
road network like traffic sings or traffic lights. Used
settings like the operating mode, used units or version
number of the ADAS Horizon Provider are distributed
by using the META-DATA Message. Each message
is only sent once by the ADAS Horizon Provider,
except if an ADAS application requests a retrans-
mission by sending a RETRANSMISSION-REQUEST
Message. More detailed information about the ADA-
SISv2 specification can be found in (Ress et al.,
2005) (Ress et al., 2008). For data storage of dig-
ital road maps, different formates have been devel-
oped for different purposes. For plain data stor-
age or archiving, formats like the Geographic Data
File (GDF) (Volker, Walter, 1996) or the german
Amtliches Topologisches Kartographisches Informa-
tionssystem (ATKI) (Volker, Walter, 1996) are used.
The OpenStreetMap project has developed its own
OSM-XML format, that is based on an XML-structure
which has no restrictions in therms of extensions.The
GDF, ATKI and OSM-XML formats all store data in a
serial manner, which is very costly in terms of search-
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
80
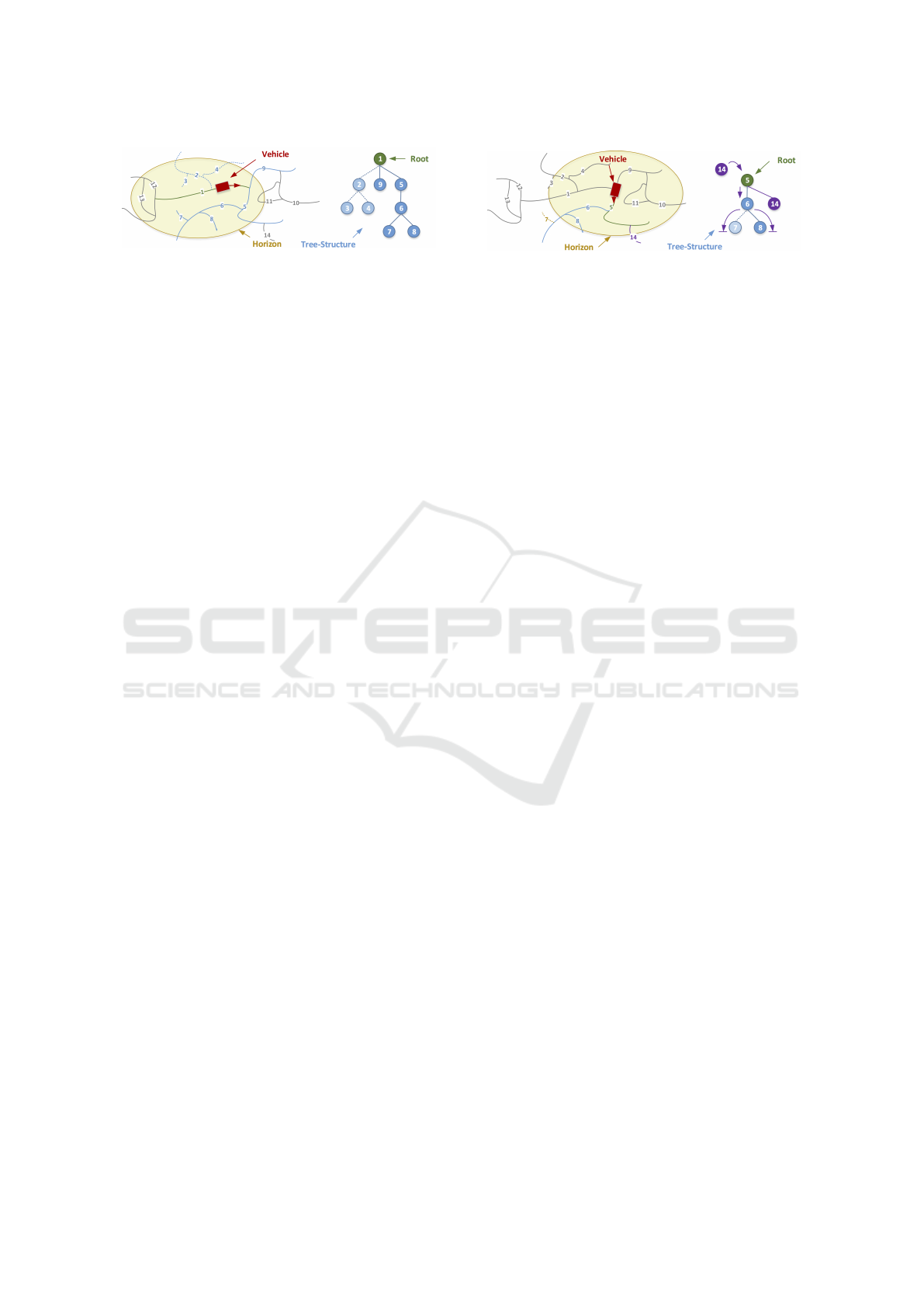
Figure 3: Movement within the current tree structure.
Passed nodes are neglected.
ing for a specific element. Therefore, road maps used
for runtime applications are commonly compiled to a
binary format to reduce storage requirements and in-
crease data access speeds. However, binary formates
are not designed for updates later on. Another im-
portant topic is Map-Matching that becomes impor-
tant for every mobile application that makes uses of
digital road map data. Map-Matching describes the
action of mapping the vehicles geographical position
onto the map and determining the currently used road
segment. Several algorithms to solve this task have
been published in literature. Kim et al. (Kim et al.,
1996) presented already in 1996 a light weight ap-
proach of mapping positions to the closest point on
the map. However, in order to achieve overall good
mapping results, the algorithm has to compensate in-
accuracies and variations in positioning data. Quddus
et al. (Quddus et al., 2003) introduced in 2003 a more
advanced and accurate approach, that uses the recent
position history and dead reckoning to identify the po-
sition of the vehicle on a map. Dead reckoning uses
other sensor data like steering angle and vehicle ve-
locity to calculate deltas in the position. It is also used
to keep up navigation, if for a short period of time no
satellite position signal is received, e.g. while driv-
ing through a tunnel. Several other approaches, serv-
ing various requirements can be found in literature.
For geographical location determination, we consider
Global Positioning System (GPS), which can achieve
an accuracy around 1 to 3 meter for civil services, by
use of the European Geostationary Navigation Over-
lay Service (EGNOS) or Wide Area Augmentation
System (WAAS). An important source for informa-
tion about the current traffic situation are Traffic and
Travel Information (TTI), which are also supported
conceptually within Horizon.KOM.
3 MODEL
The model of Horizon.KOM is depicted in Figure 2.
It is based on dynamic and static data provided by
the vehicle’s sensors and external sources. Dynamic
data varies over time and includes the geographic po-
sition as well as traffic information. Additional data
from the vehicle is also provided via the internal data
Figure 4: Further movement within the tree structure.
Adding new nodes to the tree structure.
bus. Digital map data is assumed to be mostly static.
Horizon.KOM is basically composed of six compo-
nents. The Tree-Structure (I) is used to store the road
segments located ahead of the vehicle including their
characteristics and additional information. This is a
central element that combines all other components
and further is used as interface to ADASIS. The size
of the vehicles eHorizon, which effects the number of
nodes (road segments) stored at the Tree-Structure is
defined by the eHorizon Size Determination (II) and is
a function of the vehicle’s velocity. A predicted route,
which the vehicle most likely will take, is defined by
the Most Probable Path (MPP)(III). It has an impor-
tant influence on the shape and the size of the vehi-
cles eHorizon area. Based on this eHorizon area and
information provided by a digital map, the Dynamic
Road Administration (IV) component defines the data
that is stored in the Tree-Structure. The Map Match-
ing (V) component keeps track and enriches the Tree-
Structure of the vehicles current position. Using the
Traffic Data Manager (VI) the Tree-Structure is ex-
tended by external Traffic Data Information along the
eHorizon. These components are explained in more
detail in the following.
(I) Tree-Structure: A basic component of the vehi-
cle’s eHorizon is the digital road map. In order to
enable a cost efficient definition of the vehicles eHori-
zon in terms of computational power, the network of
road segments that is mapped on this eHorizon has
to be stored efficiently. Therefore we propose a tree-
based data structure to store road segments that are
ahead of the vehicle. Due to this Tree-Structure, the
map is easily extensible and allows a fast adaption of
new road segments or other entities. The currently
used road segment is represented by the root of the
tree. Each connecting road segment is linked to this
root node and thus mapped as a second-tier node to
the Tree-Structure. This is a multi-tier representation
and in general road segments are accessible from the
segment a tier above. Road intersections are repre-
sented by connections between nodes of different tier
levels. The driving direction of the vehicle is used
to exclude road segments from the Tree-Structure that
have already been passed. In order to limit the number
of nodes within the Tree-Structure, we limit the num-
ber of maximum tiers along the Most Probable Path
Horizon.KOM: A First Step Towards an Open Vehicular Horizon Provider
81

(MPP) and limit the size of the covered geographi-
cal area. Thus, leaves of the tree represent either a
dead end or a road that continues beyond the eHori-
zon area. The Tree-Structure is updates each time the
vehicle moves onto another road segment. Then this
segment becomes the root node. If the vehicle passes
an intersection, all passed segments are marked as not
accessible but remain in the Tree-Structure until the
next update. An example if given in figure 3, here
the vehicle has passed road segment 2 and nodes 2,
3 and 4 remain in the Tree-Structure marked as not
accessible. As soon as the vehicle moves onto a new
segment, the Tree-Structure is updated and the new
segment becomes the root node. The Tree-Structure
has now to be reordered and all nodes that are only
connected to the old root node are removed. New
road segments are added accordingly to the eHorizon
size as explained before. An example if given in fig-
ure 4, here segment 5 becomes the new root node and
nodes 2, 3, 4, and 9 vanish by removing node 1 and,
node 14 is added. Although node 7 has left the eHori-
zon area, it will remain in the Tree-Structure, due to
the existing possibility of entering the eHorizon area
again. To store road segments as node, we use a linear
space representation, i.e., a linear line with a defined
length, that provides an additional simplification and
reduction of overhead. This notation is related to the
segment representation of the ADASIS specification
and provides an easy data exchange between ADASIS
and the Tree-Structure. Therefore, the natural shape
of a segment defined by its intermediate points (ab-
solute coordinates) is removed. To compensate the
information loss, the natural shape is translated into
a list of curvature values that are distributed along
the segment, denoted with offset values. All location
depending information, including the current vehicle
position, is defined by an offset value starting from
the beginning of the road segment and is stored inside
each node. Each node contains at minimum informa-
tion about its length, road type, and curvature values.
Additional information of any type can be stored in a
similar manner.
(II) eHorizon Size Determination: The size of the
eHorizon defines which nodes are stored in the Tree-
Structure. We have to limit the size of this eHorizon
due to limited resources in terms of processing power
and storage space. Moreover, a dynamic size of the
eHorizon is required in order to cope with different
application scenarios. A vehicle driving with high
speed, e.g., on a highway, needs an eHorizon of sev-
eral kilometers ahead. However, considering urban
areas, a smaler eHorizon is feasible. We propose two
different approaches to define the size of the eHori-
zon based on the vehicles context. (I) By identifying
the context of the vehicle, with respect of the road
type (e.g. city, highway, ...) an appropriate eHorizon
can be defined. (II) We can define the eHorizon as a
function of the vehicle velocity. An increased veloc-
ity indicates road types such as a highway. However,
we need to consider a temporary reduced speed due to
characteristics of the route or traffic jams on the high-
way, leading to a very low velocity. In the following
we consider the vehicle velocity to define the size of
the eHorizon due to the fact that semantic description
of the road types may not always be provided by dig-
ital maps. The maximum radius of the eHorizon is
defined by the vehicle velocity (v) and the parameter
d as shown in Equation 1. The parameter d can be
used to adapt the overall size of the eHorizon.
Max
eHorizon,d
= e
log
2
(v)∗d
(1)
However, the size of the eHorizon is further influ-
enced by four adaptations. (I) As mentioned before,
reducing the vehicle’s speed would result in a reduced
vehicles eHorizon. We will not truncate the tree-
structure due to the reduced speed, but new nodes will
only be added based on the new reduced size of the
eHorizon. (II) The depth of the tree has to be lim-
ited, i.e., to limit the number n of tier-levels. On a
highway a very large eHorizon is necessary due to
vehicle velocity. On an exit toward a city the vehi-
cle is still on a highway but the MPP goes toward an
urban area that would cause in a high overhead, espe-
cially if the vehicle is not exiting exiting the highway.
Thus the tier-levels have to be limited. (III) More-
over, we have to handle nodes that are located within
the eHorizon, but are not accessible via a route stored
in the tree-structure. We assume that these nodes will
not be added to the tree-structure, due to the miss-
ing accessibility in terms of our current tree-structure
state. Road segment 11 in Figure 3 illustrates such
a scenario. (IV) The last adaptation is the influence
of the MPP. By predicting the route with the highest
probability the respective path nodes can be included
with a higher priority. Therefore, the MPP is stored
with an increased level of detail and with an increased
number of tier-levels. This adaptation will result in an
more elongated vehicle eHorizon.
(III) Most Probable Path: In the previous sections,
we defined a system that is able to map all relevant
road segments, including any related data, within a
specific distance efficiently in a tree based structure.
In the following the model is extended by a mech-
anism that predicts the MPP the vehicle will most
likely use. In order to predict the MPP, knowledge
about the vehicles final destination is not mandatory
and can therefore be assumed as not given. We further
assume an infinite route which is only limited by the
size of the eHorizon. Thus there will always be a suc-
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
82
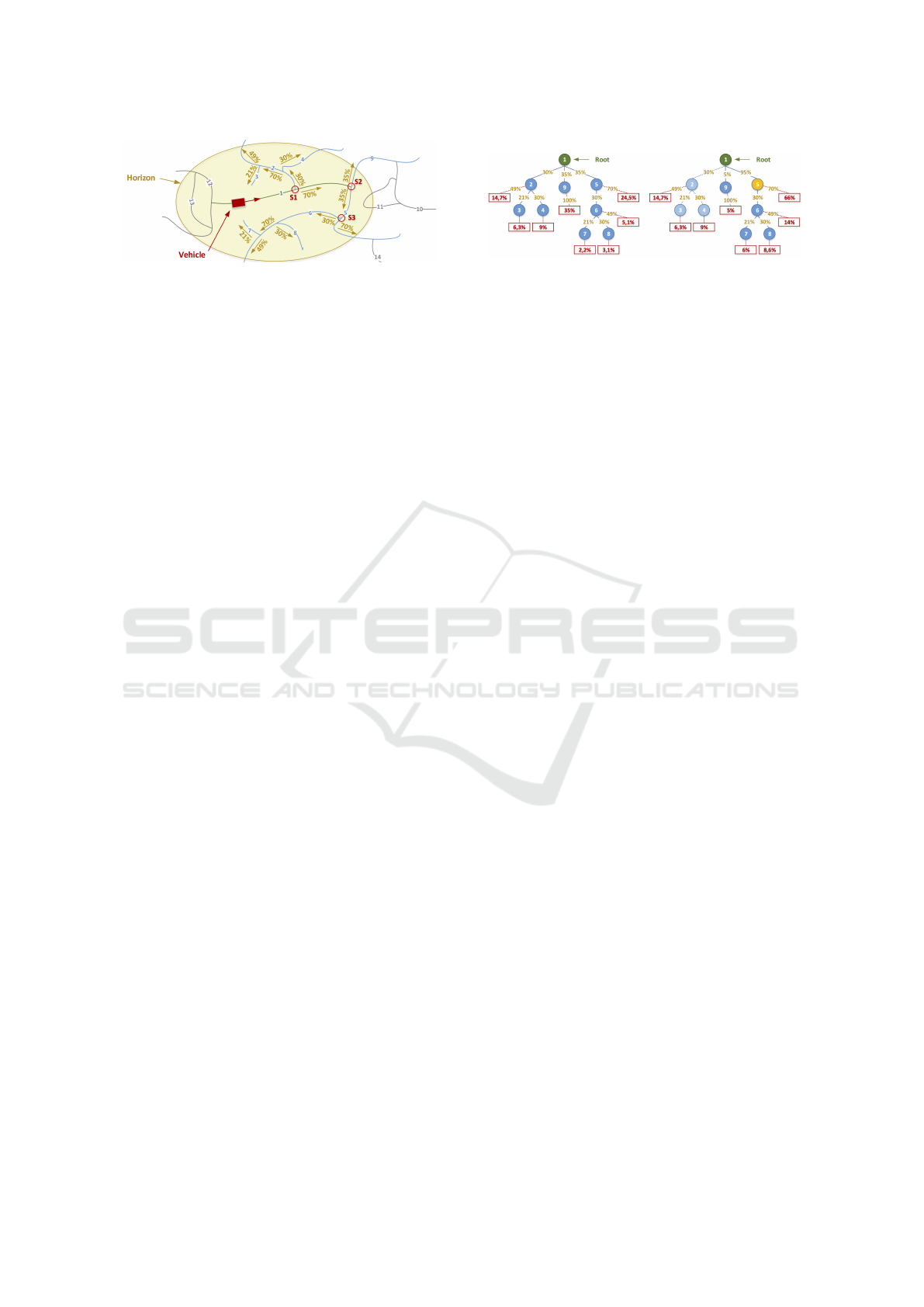
Figure 5: Example for the probability distribution of the
previously introduced scenario.
cessor node, and therefore one of the child nodes will
be the next root node. Moreover, we assume the ab-
solute vehicle position as not necessary, since the root
node and vehicle offset, stored in the Tree-Structure,
provide sufficient information. As already defined, all
child nodes of a parent node are located in driving di-
rection of the vehicle and denote the set of available
successor road segments. A probability distribution is
assigned to each set of available successor nodes, as-
sociated the respective parent node. The probability
value of each node is based on a predefined distribu-
tion table, which holds values for any kind of inter-
section, road type, and road class combination. The
table can be adapted individually based on statistical
data. An improvement of the table can be achieved
by searching and evaluating regularly driven routes,
e.g., the drivers route between home and workplace.
Figure 5 shows an example probability distribution of
the previously introduced scenario. The vehicle is ap-
proaching intersection S1. With a probability of 70%
the vehicle will continue on road segment no. 1 and
it will turn into the connecting segment no. 2 (side
road) with a probability of 30%. At intersection S2
two options exist (segments 5 & 9), both of the same
road class and thus denoted with 50%. This leads
to a value of 35% in the overall probability distribu-
tion of available successor nodes. Figure 6 depicts
on the left side the probability distribution inside the
Tree-Structure. The right side depicts the exclusion of
passed nodes. When the vehicle is approaching an in-
tersection, indicators like turning signals, the vehicles
speed profile, steering wheel position, and as well the
currently selected lane, are used to enhance the MPP.
The vehicle is approaching intersection S2 with turn-
ing signals set and decreasing velocity (v). We have
to differentiate between ambiguous and unambiguous
probability distribution. If the road segment the ve-
hicle will turn into is vague, ambiguous probability
distribution is used. Thus the MPP can only be de-
termined by the values of the predefined distribution
table. In contrast, an unambiguous probability distri-
bution provides a high probability that the next road
segment can be predicted correctly. This is the case
if the previously mentioned indicators are used. The
MPP can be extracted by traversing the Tree-Structure
Figure 6: Example for the probability distribution according
to introduced scenario.
along the highest probabilities of each child node.
(IV) Dynamic Road Administration: The Dynamic
Road Administration fills the Tree-Structure with data
and maintains its up-to-dateness as iterative process.
Furthermore, it is used to enrich the data with addi-
tional information that is not part of the digital map,
if available. The basic concept is in a first step to de-
termine all road segments that are located the vehi-
cle driving direction and that are within the eHorizon
area according to the eHorizon Size Determination.
We assume that the minimum Tree-Structure always
contains a valid root node. At the very first, the root
node will be determined by the Map Matching in an
initial process. Next, the Dynamic Road Administra-
tion loads all remaining road segments from the digi-
tal map and stores them in the Tree-Structure. During
movement the component continuously traverses the
Tree-Structure to determine and add missing road seg-
ments. The processing of each road segment contains
a transformation into linear space and computation of
additional information.
(V) Map Matching: The position is provided by a
GNSS system, e.g. GPS, but with limited accuracy.
A Map Matching component can compensate this by
mapping the vehicle onto a known road network. Sev-
eral algorithms are known in literature to minimize
the chance of mismatching. For this the recent po-
sition history and dead reckoning is used. We rec-
ommend to use the algorithm introduced by Quddus
et al. (Quddus et al., 2003), that is also used in our
prototype implementation. The matching of geo po-
sition and the driven distance L is combined to deter-
mine the vehicles current offset. The Map Matching
component fulfills several tasks. First of all it updates
the root node with the vehicle offset, i.e., the trans-
lation of the geographical position into a segment re-
lated value. It is also responsible to find and define
the first root node when the model is initialized and,
therefore, the tree-structure is still empty. Further-
more it detects a vehicles road segment transition and
updates the current root node with the respective suc-
cessor node.
(VI) Traffic Data Manager: The Traffic and Travel
Information (TTI) is stored separately from the Tree-
Structure. The main responsibility of the Traffic Data
Horizon.KOM: A First Step Towards an Open Vehicular Horizon Provider
83

Manager, is to sort, filter and prioritize incommoding
traffic information as well as to provide a link between
the stored traffic records and the road segments of the
Tree-Structure. A traffic record can be linked to more
than one road segment and even effect an entire geo-
graphical area. The separation is intended to reduce a
additional computation and storage overhead.
4 IMPLEMENTATION
The prototype implementation of our model is an An-
droid project and makes use of maps from the Open-
StreetMap project. The implementation has some ab-
stractions to reduce complexity. Due to the imple-
mentation on a mobile device, we have to cope with
the absence of data telemetry, provided by the ve-
hicle. Thus we simulate turning signals by imple-
menting two buttons indicating an according behav-
ior. We have implemented an own road map database
including a lightweight interface using SQLite. For
Map-Matching we have implemented an approach ac-
cording to Quddus et al. (Quddus et al., 2003). Due
to the absence of vehicle telemetry, we have applied
a simplified algorithm to determine the MPP. It is
assumed, that the vehicle will continue traveling on
the currently selected road segment with a probabil-
ity of 100%, if no signal indicator is applied. The
Android application consists of two views. The first
view shows several information regarding the Map
Matching and size of the eHorizon. The second view
depicts, on top of a map visualization, the currently
loaded eHorizon as blue paths, the predicted MPP
marked as red paths, the current position marked by a
red dot. The eHorizon Size Determination, Dynamic
Road Administration, Most Probable Path and Map-
Matching are implemented as Android Service. Each
of these services operates in parallel with access to
the Tree-Structure, that is incorporated into the An-
droid Application Layer.
5 SUMMARY AND SOURCES
In this paper we have introduced our eHorizon
software prototype. In summary, our model of the
eHorizon provides a well suited data storage model in
form of a Tree-Structure to natively and dynamically
store the required road information. The presented
eHorizon Size Determination provides the current
eHorizon size with respect to several scenarios
regarding the vehicles velocity v and driving envi-
ronment, i.e., street type or urban area. We also have
provisioned a method to predict and incorporate the
MPP, including the learning of frequently used routes
and runtime probability adaption. The choice of the
Navigation Data Standard (NDS), accessing at least
one digital map, ensures a future interoperability
with other applications. To enrich the electronic
eHorizon data, we also have incorporated Traffic
and Travel Information (TTI) into our model. The
holistic module-based approach provides the freedom
of extending our eHorizon and apply adjustments
to fulfill individual requirements. Furthermore, the
majority of the introduced tasks are designed to be
executed in parallel. We did several experiments to
prove the functionality of our model. In a next step
we plan a performance evaluation and a transfer into
a universal Java library to be used easily on other
platforms. The source code of our prototype is avail-
able under Apache 2.0 open source license on our
website: http://www.kom.tu-darmstadt.de/ research-
results/ software-downloads/software/horizonkom/.
Furthermore we are currently working on extensions
and improvements and will continuously update the
available implementation.
REFERENCES
Durekovic et al. (2011). Architectures of Map-Supported
ADAS. In Intelligent Vehicles Symposium (IV), 2011
IEEE, pages 207–211. NAVTEQ.
Kim, J., JH, L., TH, K., WY, L., and YG, K. (1996). Node
based map matching algorithm for car navigation sys-
tem. In International Symposium on Automotive Tech-
nology & Automation (29th: 1996: Florence, Italy).
Quddus, M., Ochieng, W. Y., Zhao, L., and Noland, R.
(2003). A general map matching algorithm for trans-
port telematics applications. GPS Solutions, 7:157–
167.
Ress, C., Balzer, D., Bracht, A., Durekovic, S., and
L
¨
owenau, J. (2008). ADASIS Protocol for Advanced
in-vehicle Applications. In ITS World Congress. New
York.
Ress, C., Etemad, A., Kuck, D., and Boerger, M. (2005).
Electronic Horizon - Supporting ADAS Applications
with Predictive Map Data. In ITS European Congress,
Hannover, Germany-TS, volume 18.
Volker, Walter (1996). Zuordnung von Rraumbezogenen
Daten – am Beispiel der Datenmodelle ATKIS und
GDF. PhD thesis, Univerity Stuttgart.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
84
