
A Robot-based Application for
Physical Exercise Training
Michalis Foukarakis, Ilia Adami, Danae Ioannidi, Asterios Leonidis, Damien Michel,
Ammar Qammaz, Konstantinos Papoutsakis, Margherita Antona and Antonis Argyros
Foundation for Research & Technology – Hellas (FORTH), Institute of Computer Science,
Vassilika Vouton, 70013 Heraklion, Greece
Keywords: Physical Exercise, Elderly People, Assistive Robot, Human Motion Capture, Gesture Recognition.
Abstract: According to studies, performing physical exercise is beneficial for reducing the risk of falling in the elderly
and prolonging their stay at home. In addition, regular exercising helps cognitive function and increases pos-
itive behaviour for seniors with cognitive impairment and dementia. In this paper, a fitness application inte-
grated into a service robot is presented. Its aim is to motivate the users to perform physical training by provid-
ing relevant exercises and useful feedback on their progress. The application utilizes the robot vision system
to track and recognize user movements and activities and supports multimodal interaction with the user. The
paper describes the design challenges, the system architecture, the user interface and the human motion cap-
turing module. Additionally, it discusses some results from user testing in laboratory and home-based trials.
1 INTRODUCTION
Physical well-being affects a great deal the overall
quality of life of any person, but even more so that of
a senior, as it may be one of the determining factors
for allowing that person to continue living an inde-
pendent life at home. The multiple positive effects of
regular physical exercise on maintaining and improv-
ing the overall physical and mental well-being of the
elderly are well known and documented. Physical fit-
ness is associated with better balance, motor skills,
and improved reaction times for the elderly (Buchner
et al, 1997). As data acquired from multiple studies
have demonstrated (Laurin et al., 2001; Heyn et al.,
2004), it has also been associated with a lower risk of
developing cognitive disorders like dementia. Im-
proving upper limb function and increasing trunk en-
durance and trunk strength has been proven to im-
prove balance (Suri et al., 2009) and stabilize posture
(Kaminski et al., 1995), thus reducing the risk of falls.
However, in order for any exercise routine to be ben-
eficial to the elderly, it is important that it is designed
specifically for their needs, while taking into account
all the potential physical limitations that may be pre-
1
www.hobbit-project.eu
sent due to an ailment or due to age related dysfunc-
tions (e.g., limited flexibility of the joints, shorter
ranges of motion, etc.). In addition, supervision by a
trainer is essential for ensuring that the exercises are
executed correctly, thus limiting the risk of injury,
and for providing appropriate encouragement or ad-
ditional instructions when necessary. Many nursing
and care facilities for the elderly offer exercise classes
instructed by trainers. However, access to such struc-
tured classes is not always easy or possible for elderly
people for many reasons, such as lack of transporta-
tion, inability to leave the house easily due to health
conditions, geographic isolation, schedule conflicts,
etc.
A potential solution to this problem has been ex-
plored in the context of the EU funded project
HOBBIT
1
. For this purpose, a fitness application has
been designed and developed, which is integrated in
the HOBBIT robotic platform for the elderly to use
on demand. More specifically, this application is a
guided fitness routine especially designed for the
needs of the elderly that can be practiced in a safe and
pleasant way. The application runs as a component of
the HOBBIT robot system, a low cost mutual care as-
sistive robot targeted to reduce the risk of falling at
home through a variety of functions.
Foukarakis, M., Adami, I., Ioannidi, D., Leonidis, A., Michel, D., Qammaz, A., Papoutsakis, K., Antona, M. and Argyros, A.
A Robot-based Application for Physical Exercise Training.
In Proceedings of the International Conference on Information and Communication Technologies for Ageing Well and e-Health (ICT4AWE 2016), pages 45-52
ISBN: 978-989-758-180-9
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
45

2 RELATED WORK
In recent years, researchers have explored ways to ex-
ploit the technological advances of gesture recogni-
tion and motion tracking systems in the field of reha-
bilitative and physical therapy, with very positive re-
sults. Virtual reality gaming using commercially
available systems, such as Microsoft’s Kinect and
Nintendo’s Wii platform, has been shown to improve
measures of upper limb function in stroke survivors
and balance in elderly people in community and hos-
pital settings (Davies et al., 2014). A quick literature
review on the subject of Kinect and physiotherapy
will produce many results of such research projects
which aim to develop applications that can provide
real time virtual assistance to patients performing spe-
cific exercises, while also helping therapists to track
and monitor the progress of their patients even from
a remote location (Saposnik & Levin, 2011; Chang et
al., 2011; Wei-Min et al., 2013). The subject of ro-
botic assistants that facilitate physical training is ad-
dressed in (Fasola & Mataric, 2012; Werner et al.,
2013).
Systems in these studies as well as commercial ap-
plications use a similar setting; the user stands in front
of a large screen that displays two avatars, one that
represents the trainer and the other the user. The mo-
tion-tracking camera reads the movements of the user
and transfers them on the respective avatar. In most
of these systems, the movements of the patient are
displayed on the screen, against or in parallel to the
movements of the trainer avatar. In that way, the user
has immediate visual feedback on how accurate his or
her movements are compared to the ones demon-
strated by the trainer avatar. In other systems, the user
has to perform specific movements in order to score
points in the context of a fun video game. Using video
gaming platforms in physical therapy has been shown
to be an effective method that increases the engage-
ment and motivation of patients to follow and com-
plete their physical program (Davies et al., 2014; Un-
nikrishnan et al., 2013).
3 DESIGN CHALLENGES
The main objective of the fitness application is to pro-
mote and facilitate physical fitness for the users of the
robot in their own home environment. To achieve
this, the application provides a guided exercise pro-
gram especially designed for the elderly, which can
be initiated from the robot’s main interface at any
time. The application is also able to track the user’s
performance during the exercise and provide con-
structive feedback when needed. The application is
not to be intended as a therapeutic or rehabilitation
tool, but as a tool to help the users maintain or im-
prove their motor skills and balance. The application
offers exercises that are presented sequentially
through a video trainer guiding the user throughout
the fitness program. It uses a human tracking system
in order to detect and display user’s movements,
through the avatar, while executing an exercise. The
user’s avatar is depicted right next to the virtual
trainer for direct visual comparison. Feedback to the
user (i.e., instructions, corrections, and general en-
couragement), is provided through HOBBIT in a mul-
timodal manner, auditory and textual.
3.1 User Requirements
The user requirements for the fitness application were
gathered and elaborated through brainstorming and
observation sessions at a local day-care and activity
center for the elderly, with the involvement of geriat-
ric occupational therapists and HCI experts. The cen-
ter offers a 30 minutes fitness program twice a week,
where a group of 25 members have the opportunity to
exercise the upper body while seated. The elaboration
of the user requirements was based on two videotaped
sessions presenting the potentials of the elderly in ex-
ecuting upper body exercises, on information gath-
ered through an anonymous short questioner, as well
as on valuable brain-storming sessions with the elder
members and the center personnel.
The following requirements were derived:
• Overall Experience. The application must be
pleasant and engaging.
• Usable Interaction Paradigm. The user interface
should be designed in a way that the interaction
paradigm is close to that of a real fitness class set-
ting,
• Continuous Flow of Interaction. The user should
not wait for long periods of time between exercises
or application dialogues to avoid frustration or
even fatigue.
• Designated Exercise Area and Position. All the
exercises must be performed from a seated posi-
tion. Exercising from a sitting position improves
safety, since the base of support is greater than that
of standing, while also increases the ability to per-
form motor activities with arms and hands (Greene
& Roberts, 2005). The user’s chair must be sturdy
with no bulky legs and arms to allow uncon-
strained body movements and avoid tracking mis-
reading and miscalculations. An area in front of the
ICT4AWE 2016 - 2nd International Conference on Information and Communication Technologies for Ageing Well and e-Health
46

user with appropriate space for the robot to stand
is also needed.
• Elderly Specific Exercise Routines. The exercise
routines must be designed for the average 70+
years of age user that is not experiencing any major
or fitness forbidding health and physical problems.
The exercise routines should be designed in close
consultation with health professionals who have
expertise for the elderly (e.g. occupational and
physical therapists).
• Instructions. The instructions given by the trainer
avatar must be precise, short, and clear.
• GUI Visibility. The avatars must be large enough
to be clearly seen from required 2 meters distance
that the user has to keep from the camera sensor of
the robot.
3.2 Technical Constraints
The design of the fitness application had to overcome
various challenges that derived from limitations and
constraints of the specific robot-based set-up. These
include:
• Operation Distance. HOBBIT uses a Microsoft
Kinect visual sensor
2
to detect the user and track
his/her movements. This means that the sensor re-
quires the user to be within its field of view and at
a certain distance in order to work properly. As a
consequence, the robot needs to stand approxi-
mately 2 meters away from the user at all times
during the execution of the fitness application. Fig-
ure 1 shows the recommended user/robot setup.
Figure 1: The fitness application setup. HOBBIT is stand-
ing at least two meters in front of the user.
• Screen Size. HOBBIT has a tablet on the front side
where the application is shown. The screen’s diag-
onal size is 12.1 inches, which is considered rather
small for long distance viewing and poses signifi-
cant constraints on the user interface design.
2
https://dev.windows.com/en-us/kinect
• Limited Interaction. The required distance be-
tween the robot and the user renders the touch
screen interaction method and textual feedback in-
efficient, making other modes of interaction (i.e.,
gestures, voice commands, verbal output) essential
for communication.
• Sensing Constraints. Despite the fact that state-
of-the-art, patent pending technology is used to
support human motion tracking and activity recog-
nition (Michel & Argyros, 2014), certain body
poses cannot be recognized (e.g., side views that
lead to severe self-occlusions). Therefore, the ex-
ercise routine should exclude such poses to avoid
human pose estimation errors.
• System Complexity. HOBBIT is a complex sys-
tem that provides multiple functionalities which
need orchestration. The fitness application is only
part of this system and needs to cooperate fully
with the rest of the components. In most cases
(emergencies, low battery power, etc.) the applica-
tion needs be able to terminate gracefully and
transparently to the user.
4 SYSTEM ARCHITECTURE
AND USER INTERFACE
Figure 2 shows the architecture of the fitness applica-
tion, its internal components and its communication
with the overall HOBBIT system. The application is
divided into three modules: (i) The graphical user in-
terface (GUI), which takes care of the visual part of
the application and accepts user input when required;
(ii) the sensor module, which is responsible for rec-
ognizing user movements and tracks the user skeleton
so that it can be shown in the user interface; (iii) the
controller module, which acts as an intermediate
communication layer between the other two modules.
The controller module acts as an intermediary
among the other components. It is responsible for
translating and passing any messages that come from
the sensor module to the GUI module and vice versa.
This data includes information about which exercise
is currently tracked, if a repetition was successful or
not, if an error has occurred, and detected user skele-
ton joint coordinates. It also receives messages from
HOBBIT’s multimodal User Interface (MMUI) to fa-
cilitate robust integration with the rest of the user in-
terface system.
The sensor module is the one responsible for de-
tecting specific (correct or erroneous) user move-
A Robot-based Application for Physical Exercise Training
47

ments while he or she is doing an exercise. To this
end, four specific physical exercises were designed
for the elderly, including repetitive movements for
lateral or/and bilateral abduction (or 90
o
elevation) of
shoulders with upper extremities extended and lateral
and bilateral elbow flexion with shoulder elevation in
90
o
. The exercises follow instructions and examples
from the official website of the National Health Ser-
vice in England
3
. This module is described in more
details in section 5.
The GUI module is responsible for presenting au-
diovisual information to the user based on the ap-
proach described below.
Each of the exercises is demonstrated to the user
through a video displayed on the touch screen (tablet)
of the platform while the platform is placed towards
the user at a distance of at least 2 meters. HOBBIT
prompts the user to execute a specific number of rep-
etitions for a specific exercise providing auditory
guidance. During exercise execution, the GUI is split
in the following 3 major areas: (i) Trainer area where
the screen shows a video presenting a human trainer
executing the exercise; (ii) User area where the user
avatar (a visualization of current body configuration
of the observed user) is shown; (iii) Feedback area
displaying messages in the bottom center.
The system is able to recognize the repetitive
movements of the arms corresponding to the known
ongoing exercise and as a result to count them as ex-
ecuted repetitions. Moreover, any errors on the exe-
cution of an exercise compared to its known model
are evaluated in order to provide relevant feedback to
the user on the quality of his/her performance and po-
tential correction to be applied in the next round of
repetitions. For example, one of the four exercises re-
fers to six repetitions of left arm movement from ver-
tical to horizontal position and back to vertical. Some
type of errors that can be assessed involve, usage of a
wrong arm (e.g. the right arm instead of the left one)
of the user or the arm should be extended closer to the
horizontal position or the arm should be lowered
closer toward the vertical position, etc. Auditory feed-
back toward the user can be provided at the time of
execution or after the completion of the exercise. If
the perceived repetitions were completed without any
errors, the user will receive a positive message; oth-
erwise relevant auditory feedback is provided letting
the user know what kind of movement error was as-
sessed during the repetitions.
3
http://www.nhs.uk
Figure 2: Fitness application communication architecture.
5 HUMAN MOTION CAPTURE
AND GESTURE RECOGNITION
The developed fitness application relies on a com-
puter vision method (Michel & Argyros, 2014) that
estimates the 3D position, orientation and full articu-
lation of the upper human body from markerless vis-
ual observations obtained by an RGBD camera. This
method takes into consideration the high dimension-
ality and the variability of the tracked person regard-
ing appearance, body dimensions, etc. It performs un-
obtrusive, markerless tracking that does not interfere
with the environment, the subject and its actions. The
method achieves real time performance on a conven-
tional computer and relies on an inexpensive sensory
apparatus (RGBD or depth camera). It exhibits ro-
bustness in a number of challenging conditions (illu-
mination changes, environment clutter, camera mo-
tion, etc). In contrast to other methods, it performs au-
tomatic human detection and automatic tracking ini-
tialization and offers high tolerance with respect to
variations in human body dimensions, clothing, etc.
The interaction of the user with the robot is sup-
ported by vision-based gesture recognition (Michel et
al., 2014). The considered gestural vocabulary con-
sists of five user specified hand gestures that convey
important messages in the context of human-robot di-
alogue. Despite their small number, the recognition of
these gestures exhibits considerable challenges. Aim-
ing at natural, easy-to-memorize means of interac-
tion, users have identified gestures consisting of both
static and dynamic hand configurations that involve
different scales of observation (from arms to fingers)
and exhibit intrinsic ambiguities. The gestures are
recognized regardless of the multifaceted variability
of the human subjects performing them. Recognition
ICT4AWE 2016 - 2nd International Conference on Information and Communication Technologies for Ageing Well and e-Health
48
is performed online, in continuous video streams con-
taining other irrelevant/non-modeled motions. All the
above are achieved by analyzing information ac-
quired by the possibly moving RGBD camera, in clut-
tered environments with considerable light variations.
The invariance to light variations is due to the fact that
gesture recognition is based solely on the depth infor-
mation provided by the RGBD cameras. Several in-
stances of RGBD cameras have been tested success-
fully including Kinect and Xtion (structured light
emission) as well as Kinect 2 (time of flight).
5.1 Methodology
A 3D skeletal-based body model is used to estimate
body pose and track body parts, providing the re-
quired representation to model any observed body
configuration for each frame. A common exercise
model for the fitness application has been defined that
incorporates the following data fields: (i) a collection
of sequential 3D body configurations that correspond
to manually selected key-point configurations of the
physical movements for an ideal execution of the ex-
ercise; (ii) a unique label; (iii) the expected number of
iterations of the complete exercise; (iv) maximum al-
lowed time intervals between consecutive key-point
body configurations of an exercise; (v) Maximum al-
lowed duration for a complete exercise to be exe-
cuted.
The type of supported exercises and the key-point
body configurations of each of them have been man-
ually selected with the help of physiotherapists and
physical trainers. The experts have indicated a valid
set of appropriate, meaningful and safe body config-
urations to be considered as key-points for an exercise
and the transition between them with respect to phys-
ical conditions of elderly. Moreover, reasonable max-
imum allowed time intervals between consecutive
key-point body configurations have also been set by
the experts.
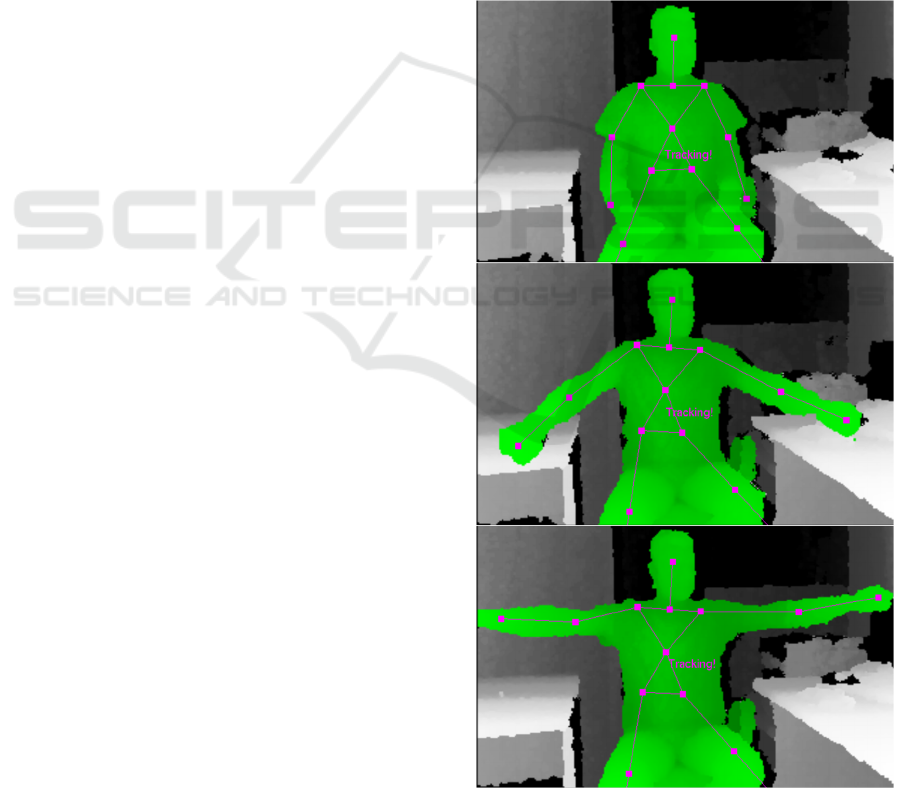
An example of a simple fitness exercise, that is
extending the arms from a seated idle body pose, is
demonstrated in figure 3, based on its key-point body
configurations. A pose-similarity function has been
defined to evaluate the proximity between two body
configurations, given the 3D positions and angles of
the tracked body joints with respect to the detected
body center, extracted by the human detection and
tracking module. The similarity score is defined
based on a weighted sum between the sum of absolute
3D Euclidean distances and the sum of absolute dif-
ferences of angles between corresponding joints
given that the two body centers are aligned. It is max-
imized in case the 3D positions and angles of the
tracked joints coincide with the corresponding joints
of the exercise model. Moreover, the absolute differ-
ences between corresponding body joints is stored for
subsequent use. The defined human posture similarity
metric is invariant to different user body sizes and di-
mensions as joint positions are normalized with re-
spect to the body center and the relevant body dimen-
sions.
The final step is to assess the similarity between
two activities in terms of body configurations pro-
vided by the exercise model to be executed, given as
input by the GUI module of the application, and the
time series of body configurations computed by the
vision-based user observation module. To this end, an
activity similarity function has been defined. It calcu-
lates a confidence value reflecting which of the ob-
served body configurations were highly similar to
Figure 3: An example fitness exercise is demonstrated
based on its three key-point body configurations.
A Robot-based Application for Physical Exercise Training
49
which of the exercise key-point body configurations,
how similar they were based on the pose-similarity
score and if the temporal order of those matches fol-
lows the requirements set by the exercise model. The
time intervals between matched body configurations
are also calculated and taken into account.
The activity similarity score for an exercise and
the time intervals between matched key-point config-
urations constitute the output of the developed mod-
ule. Moreover, statistics on the time series of absolute
residuals between corresponding skeletal joints in or-
der to identify those joints that were not matched
properly to the positions of the model are calculated.
Therefore, it is assumed that those joints are mainly
responsible for the possible failure to perform appro-
priately the intended exercise.
The output information facilitates the UI control-
ler module of the application to select and provide ap-
propriate instructions and prompts to the user as guid-
ance or feedback in order to repeat an exercise and
learn it successfully.
6 ITERATIVE DEVELOPMENT
AND USER TESTING
The application went through various iterative devel-
opment phases. The first priority was to establish ro-
bust communication architecture as described in sec-
tion 4. After that, gradual improvements were made
to the user interface and the controller module to ac-
commodate user comments, usability concerns, sen-
sor data changes and bug fixes.
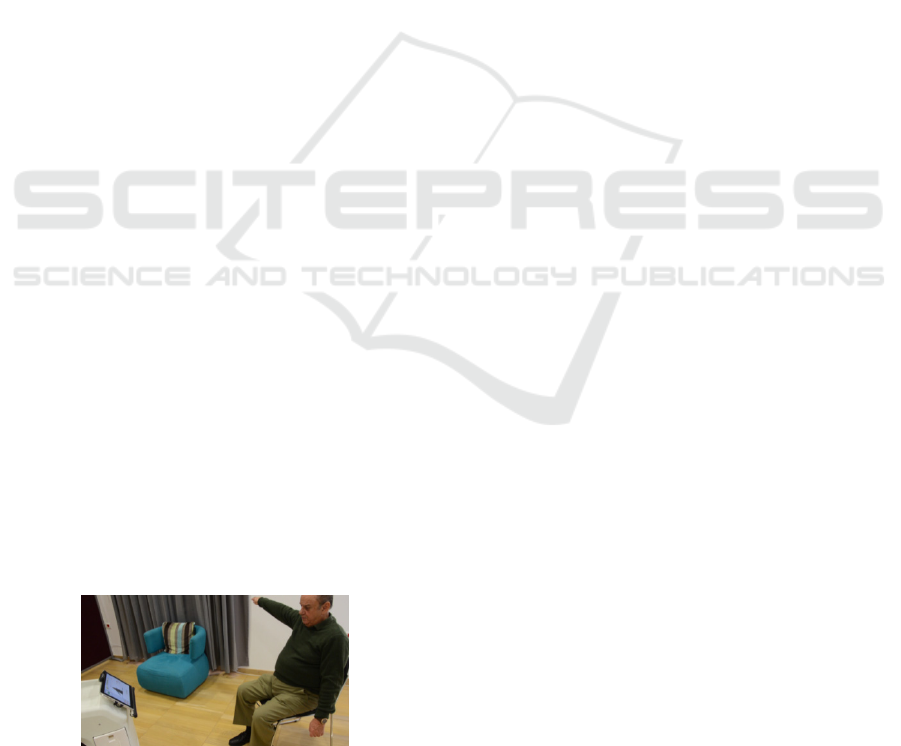
A preliminary version of the fitness application
has been tested both in the lab and in a user’s home
environment (see figure 4).
The first lab tests were performed by interaction
and user interface experts and an older adult user. The
users were instructed to activate the fitness option
from the robot’s menu and follow the instructions.
The program included three exercises where the user
was prompted to raise first the left arm to the level of
the shoulder, then the right arm and finally both arms.
Figure 4: User testing the first application prototype.
From the feedback received, a number of changes
were deemed necessary. First, a new trainer video
was recorded, shortening the introduction and remov-
ing the lengthy trainer demonstration of each exercise
to reduce distractions and ensure that the user will
start training immediately and will not be confused
about when to start. Second, exercise feedback was
redesigned to be presented immediately after the user
has done something that is detected as either wrong
or deviates from the correct exercise form. This way,
the user will have instant feedback on errors that
he/she is doing during the exercise. Third, the user
avatar was made more visible and as a mirror to the
user’s movements. Trainer instructions as to which
arm is going to be used during each exercise, were
added in order to eliminate user confusion. Fourth,
two more arm exercises and two more exercise pro-
grams were added. The three exercises of the first
prototype application were included in the ‘easy’ pro-
gram, while two more programs, ‘medium’ and ‘hard’
were added, using combinations of the available ex-
ercises. The three new programs had different num-
bers of repetitions to allow more variations and avoid
repetitive sessions and additional resting intervals to
prevent user fatigue. Finally, the repetition counter in
the user interface was found to be too small, thus it
was redesigned to be larger and more visible.
This new version of the fitness application was
tested again by lab personnel and by two elderly users
in their home environment. This improved version
was better accepted by the elderly users. They gave
positive comments about the overall application per-
formance and layout. One of the complaints was that
the trainer feedback was unnecessarily repetitive and
frequent. To improve the user experience, the fre-
quency and content of this feedback were adjusted ac-
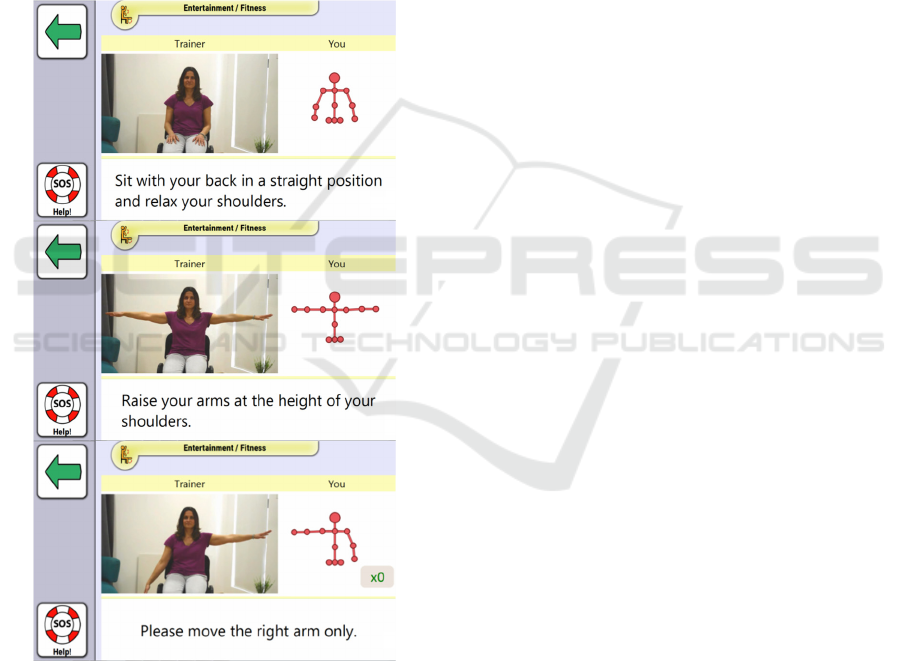
cordingly. Some examples of the fitness application in-
tegrated into HOBBIT’s MMUI are shown in figure 5.
Finally, the fitness application has been tested in
the context of the overall home-based trials of the
HOBBIT robot, involving a total of 18 users of age
75+, with various degrees of vision, hearing and mo-
bility impairments, in 3 European countries (Austria,
Sweden and Greece). Each user had a prototype
HOBBIT robot at home for a period of three weeks
and could freely use all functionality of the robot, in-
cluding the fitness application. Results were obtained
through a mix of quantitative and qualitative meth-
ods, cultural probes and logging. Regarding the fit-
ness function, the results were mainly collected
through interviews with the users. 17 users said that
they had tried the fitness function. The study revealed
diversity with regard to how the fitness feature was
perceived, with the Greek users being more satisfied
than the users in Austria and Sweden. However, the
ICT4AWE 2016 - 2nd International Conference on Information and Communication Technologies for Ageing Well and e-Health
50
results confirm that fitness was perceived by the users
in all countries as an important feature, pointing to the
need for wider selection of fitness exercises for a ro-
bot for the elderly. One participant who did not use
the fitness function had severe visual impairment and
was unable to read text on the icons or see what the
fitness instructor did when the robot was placed 2m
away from her. This points to the fact that the elderly
have very diverse needs and the interface and func-
tionality of an assistive robot needs to be adapted to
the individual user and his or her needs. Finally, ac-
cording to their comments, the users enjoyed the fit-
ness function, and some mentioned that their level of
exercise increased when they had HOBBIT due to the
fitness program.
Figure 5: Final version of the application.
7 CONCLUSION AND FUTURE
WORK
This paper has presented a physical exercise applica-
tion meant to be used by the elderly in the context of
a mutual care robot developed by the HOBBIT pro-
ject. The paper has presented the design process, the
user requirements, the technical constraints, the hu-
man motion capture and gesture recognition methods
and the development and testing process of the fitness
application. The need to develop this application was
originated from the user requirements of the HOBBIT
project. One of the goals of the project was to prevent
falls and apart from some of the robot’s functionali-
ties implemented for this purpose, a fitness applica-
tion was suggested as a means for fall prevention.
Future improvements include user interface adap-
tation features to increase accessibility and usability,
but also motivation and confidence. The following
types of adaptation are being considered: (i) suggest
the appropriate level of exercise based on past activ-
ity; (ii) adaptive motivational messages based on
tracked performance; (iii) adaptive feedback based on
success rate when performing an exercise; (iv) per-
sonalized information at the end of each exercise sec-
tion; (v) Adaptable pause behavior including pause
and automatically resume on external intervention
(e.g., phone call) and self-termination on long inac-
tivity; (vi) Identify inactivity and motivate participa-
tion (during exercises).
In addition to being integrated in the HOBBIT
platform, the fitness application can potentially also
be used independently as a standalone application in
older adult care facilities or in homes. The available
exercises focus on upper-body tracking of a seated
user. In an improved future version, a wider range of
exercises can be programmed, including leg exercises
for both seated and standing users. The user interface
can also be redesigned and improved since the robot’s
limitations (e.g. small screen size, inexpensive sen-
sors) would not apply in this case.
ACKNOWLEDGEMENTS
Part of this work has been conducted in the context of
the Project ICT-HOBBIT “HOBBIT The Mutual
Care Robot”, funded by the European Commission
under the 7th Framework Programme (Grant Agree-
ment 288146). The authors would like to thank the
TALOS Community Care & Active Ageing Center of
Heraklion Municipality for their significant contribu-
tion to the selection of the exercise program.
REFERENCES
Buchner, D.M., Cress, M.E., de Lateur, B.J., Esselman,
P.C., Margherita, A.J., Price, R., Wagner, E.H.: The Ef-
fect of Strength and Endurance Training on Gait, Bal-
A Robot-based Application for Physical Exercise Training
51

ance, Fall Risk, and Health Services Use in Commu-
nity-living Older Adults. Journals of Gerontology Se-
ries A-Biological Sciences & Medical Sciences, 52(4),
M218-24 (1997).
Chang, Y.J., Chen, S.F., Huang, J.D.: A Kinect-based Sys-
tem for Physical Rehabilitation: A Pilot Study for
Young Adults with Motor Disabilities. Res. Dev. Disa-
bil 32, 2566–2570 (2011).
Davies, T. C., Vinumon, T., Taylor, L., Parsons, J.: Let's
Kinect to Increase Balance and Coordination of Older
People: Pilot Testing of a Balloon Catching Game. In-
ternational Journal of Virtual Worlds and Human-
Computer Interaction. Vol. 2, 37-46 (2014).
Fasola, J., Mataric, M. J.: Using Socially Assistive Human–
robot Interaction to Motivate Physical Exercise for
Older Adults. Proceedings of the IEEE 100(8), 2512-
2526 (2012).
Greene, D.P., Roberts, S.L., 2005. Kinesiology: movement
in the context of activity, Elsevier Mosby. St. Louis, 2
nd
edition.
Heyn, P., Abreu, B. C., Ottenbacher, K. J.: The Effects of
Exercise Training on Elderly Persons with Cognitive
Impairment and Dementia: A Meta-analysis. Archives
of physical medicine and rehabilitation 85(10), 1694-
1704 (2004).
Kaminski, T.R., Bock, C., Gentile, A.M.: The coordination
between trunk and arm motion during pointing move-
ments. Experimental Brain Research. 106(3), 457-466
(1995),
Laurin D., Verreault R., Lindsay J., MacPherson K., Rock-
wood K.: Physical activity and risk of cognitive impair-
ment and dementia in elderly persons. Arch Neurol 58,
498-504 (2001).
Michel, D., Argyros, A.: Apparatuses, methods and systems
for recovering a 3-dimensional skeletal model of the hu-
man body, U.S. provisional patent application No.
62/053,667, 22/09/2014.
Michel, D., Papoutsakis, K., Argyros, A.: Gesture Recogni-
tion Supporting the Interaction of Humans with So-
cially Assistive Robots. Advances in Visual Computing
- 10th International Symposium, ISVC 2014, 793-804,
Springer (2014).
Saposnik, G., Levin M.: Virtual Reality in Stroke Rehabil-
itation: A Meta-analysis and Implications for Clini-
cians. Stroke 42, 1380–1386 (2011).
Suri P., Kiely D.K., Leveille S.G., Frontera W.R., Bean
J.F.: Trunk muscle attributes are associated with bal-
ance and mobility in older adults: a pilot study. PM R.
1, 916–924 (2009).
Unnikrishnan, R., Moawad, K., Bhavani, R. R.: A physio-
therapy toolkit using video games and motion tracking
technologies. In: Global Humanitarian Technology
Conference: South Asia Satellite (GHTC-SAS), pp. 90-
95, IEEE (2013).
Wei-Min, H., Chih-Chen, C., Shih-Chuan W., Yu-Luen C.,
Yuh-Shyan H., Jin-Shin L.: Combination of the Kinect
with Virtual Reality in Balance Training for the Elderly.
Engineering 5, 171-175 (2013).
Werner, F., Krainer, D., Oberzaucher, J., Werner, K.: Eval-
uation of the Acceptance of a Social Assistive Robot for
Physical Training Support Together with Older Users
and Domain Experts. Assistive Technology: From Re-
search to Practice, band 33, 137-142, IOS Press (2013).
ICT4AWE 2016 - 2nd International Conference on Information and Communication Technologies for Ageing Well and e-Health
52
