
ImocaGen: A Model-based Code Generator for Embedded Systems
Tuning
Goulven Guillou and Jean-Philippe Babau
Lab-STICC/UMR 6285, UBO, UEB, 20 Avenue Le Gorgeu, 29200 Brest, France
Keywords:
Software Architecture, Code Generation, Control.
Abstract:
IMOCA is a model-based architecture model dedicated to embedded process control systems in disturbed
environment. These systems depend on various parameters which are difficult to set because they are bound
to environment changes. In this paper we propose to extend IMOCA with the meta-model ImocaGen for
managing the aspects of the code generation. ImocaGen allows to target multiple platforms and different pro-
gramming languages, generates both embedded code as well as tuning and reconfiguration tools, takes into
account different communication protocols and offers a mechanism for integrating handwritten code. This ap-
proach is tested on a basic control application for a NXT brick for which three generations are performed: the
first one for a PC with an USB connection, the second one for an Android tablet with a Bluetooth connection
and the last one for a simulator in Java.
1 INTRODUCTION
Nowadays, embedded systems are increasingly used
in various domains like drones and environment mon-
itoring. They integrate a large set of hardware and
software components (sensors, actuators and con-
trol policies) and various technologies in various do-
mains (mechanics, electronics, hydraulics ...). Clas-
sicaly, the embedded code remains static, optimized
for a given platform, a specific application in a spe-
cific context. But, an unpredictable environment re-
quire large configuration capacity for the system. In
uncertain environment, the application domain for
this paper, remote monitoring, and sometimes re-
mote control, has to be considered. A good exam-
ple of such system in a disturbed environment may be
an autonomous sailboat equipped with many sensors
(anemometer, wind vane, speedometer, inertial mo-
tion unit, GPS ...) and actuators (ram, winch ...) on
which the rudder and the sails are controlled.
At design time, remote monitoring and tuning is
used to evaluate solutions. At run-time, remote mon-
itoring and tuning is useful to ensure safety. At the
end, there is a strong need to provide tuning tools be-
cause the system depends both intrinsic mechanical
features and environment which are difficult to model
and forecast. In this context, from high-level model,
a code generator has to address different platforms,
testing and tuning tools for quick and safe develop-
ment.
For code generation, the first challenge is to target
several platforms, for embedded code and for remote
controlling device, several communication technolo-
gies (Bluetooth, Wi-Fi, USB ...) and protocols be-
tween an embedded system and its controlling device.
The second challenge is to generate tools for mon-
itoring, testing, tuning and reconfiguring system pa-
rameters. In this paper a reconfigurable parameter is a
parameter for which its embedded value can be mod-
ified online without the need to recompile the code.
Since a large amount of code is already available
(protocols, control laws, filters, drivers ...) and in or-
der to avoid code rewriting, the last challenge is to
facilitate the integration of domain specific code and
platform-specific libraries in the generated code.
To face these challenges, in this paper, we pro-
pose a model, called ImocaGen, for generating a code
from an IMOCA architecture model. If IMOCA is
dedicated to process control systems in uncertain en-
vironments, ImocaGen, for its part, is in charge of the
aspects of the code generation (embedded system, re-
mote control and tuning tools), considering the plat-
forms, the programming languages and the commu-
nication technologies. Through a delegation mech-
anism, ImocaGen also facilitates the integration of
legacy code and allows in this manner to deal with
various heterogeneous technologies.
The remainder of the paper is organized as fol-
lows. Section 2 presents works relative to code gener-
390
Guillou, G. and Babau, J-P.
ImocaGen: A Model-based Code Generator for Embedded Systems Tuning.
DOI: 10.5220/0005804103900396
In Proceedings of the 4th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2016), pages 390-396
ISBN: 978-989-758-168-7
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
ation, simulation and tuning of control systems. Sec-
tion 3 is dedicated to an overview of IMOCA and
ImocaGen models. Section 4 details the code genera-
tion principles in order to take into account platforms,
programming languages, remote control, tuning tools
and code integration. Section 5 shows an illustrative
application for which three generations are performed
for three different platforms. Finally, section 6 con-
cludes the paper and presents ongoing works.
2 RELATED WORK
Using based components approaches (Szyperski
et al., 2002) and MDE methods for mastering the soft-
ware complexity is quite classical. In the context of
embedded systems, the wide variety of available sen-
sors and actuators and the need to change or to up-
grade them to cope with the requirements of open-
ended environments forces to design multi-levels ar-
chitectures to abstract the hardware and ensure the
separation of concerns. Software requirements are
very similar in the world of robotics and tools for
defining component-based architectures have been
proposed in this context like the middleware ROS
(Quigley et al., 2009) or the domain specific modeling
language (DSML) RobotML (Dhouib et al., 2012).
With these development environments, even if the ar-
chitecture is free (deliberative, reactive, hybrid ...),
the hardware abstraction remains limited, supporting
small hardware variability. The advantage of IMOCA
is to propose an architecture with a clear separation
between the data and the models of sensors/actuators
which ensures a high level hardware abstraction like
in SAIA (Sensors/Actuators Independent Architec-
ture) (DeAntoni and Babau, 2005).
In IMOCA, a finite state machine serves to de-
scribe the behavior of a control component. This
choice has been done for practical reasons and not
for the use of validation tools. For this perspective,
MontiArcAutomaton (Ringert et al., 2013) modeling
language or V
3
CMM (Alonso et al., 2010) offer this
kind of tools which allow to ensure that the imple-
mentation refines its specification.
For the code generation, ORCCAD (Simon et al.,
1997) is a software environment dedicated to the de-
sign and the implementation of advanced robotics
control systems but allows only the generation of C++
code. BRICS
1
, through model transformation, gen-
erates component frameworks usable in particular by
ROS but does not generate directly embedded code.
For its part, MontiArcAutomaton is multi-platform
1
http://www.best-of-robotics.org/
and allows to generate Java code and Python code
whereas RobotML allows both to target a middleware
like ROS and to generate a simulator. ImocaGen gen-
erates both embedded C-like code for multiple plat-
forms, Java simulation tools and online tuning tools.
The use of simulation in embedded systems has
been spread for cost and risk reasons. For dynam-
ical systems, Simulink
2
is very popular and more-
over allows to set the simulation for optimization pur-
poses. Robotics dedicated middlewares like ROS,
Player (Collett et al., 2005) or MIRO (Utz et al., 2002)
integrates numerous libraries (physical engines, 3D li-
braries) for helping the designer to build simulated
environments. For the moment ImocaGen does not
integrate this kind of simulators but allows generating
basic tools for simulating, monitoring and testing the
application and also tuning tools for the setting at run
time.
3 MODELS
IMOCA (Guillou and Babau, 2013) is an architecture
model for process control systems using sensors, ac-
tuators and control laws. IMOCA is especially ded-
icated to uncertain and unpredictable environments.
Aerial drones, terrestrial or underwater vehicles are
good examples of these systems. For these applica-
tions the behavior of the system depends generally
on numerous parameters which need long and tedious
settings. IMOCA deals with data acquisition, con-
trol and adaptation according to the changes of the
environment. IMOCA allows to focus on a number of
parameters in order to tune the system. For its part,
ImocaGen concentrates on code generation and plate-
forms integration. ImocaGen allows to generate both
the embedded code for the controller and tuning tools.
The former is a server and the latter is a client and
they communicate each other by using a protocol and
a particular technology.
3.1 IMOCA: Model for Control
Data
Target Control
Real
Interpretation
Actuators
Sensors
Controller
Commands
environment
simulated
or
Data
Interpreter
Commands
Interpreter
Frames represent components, arrows describe data flow
Figure 1: Principles of IMOCA approach.
IMOCA is based of three layers called Target,
Interpretation and Control (see figure 1).
2
http://fr.mathworks.com/products/simulink/
ImocaGen: A Model-based Code Generator for Embedded Systems Tuning
391
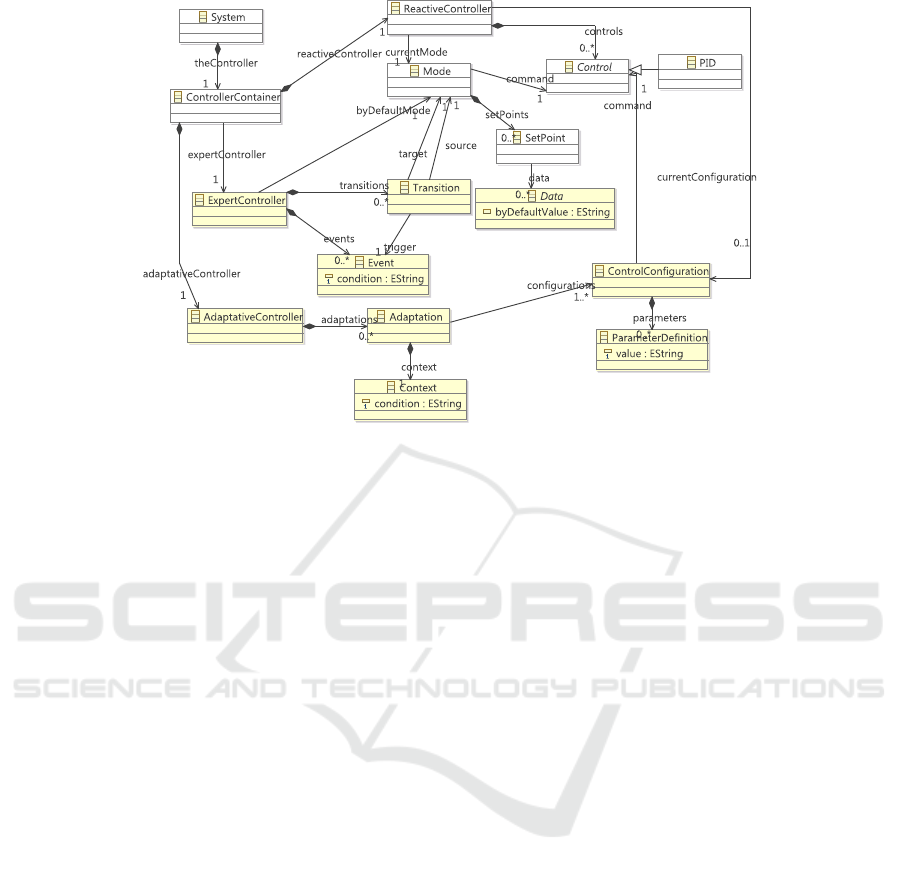
Figure 2: IMOCA view.
Target with its Actuators and Sensors is a
platform-specific model of Inputs/Outputs. Control
uses Data (a virtual view of the environment) to
compute Commands to act on the environment. The
Interpretation layer realizes the adaptation be-
tween the Target layer and the Control layer by
linking Sensors and Actuators on the one hand, and
Data and Commands on the other hand. In this way
Control and Target are independent like in SAIA
(DeAntoni and Babau, 2005) and this respects the
separation of concerns principle and allows the inde-
pendent development of specific sensors and actuators
technologies. This independence is important in the
context of embedded systems due to platforms evolu-
tions.
The Controller itself is composed of three sub-
controllers. The ReactiveController (see figure 2)
uses data to compute a command based on a control
law. The ExpertController is in charge of defin-
ing the current control law. It is based on a finite
state automaton that manages running modes. Each
state is associated with a Mode which is itself asso-
ciated with a control law. A state change is linked
to a change of state of the environment, a Context.
Finally, an AdaptativeController adjusts different
parameters of the control law (typically the P, I and
D of a PID regulator) with respect to a look-up table
in which appear all the possible configurations of the
control laws. Based on this three collaborating sub-
controllers, the Controller allows to answer the fol-
lowing requirements: controlling the process with the
ReactiveController by applying an adapted con-
trol law thanks to the ExpertController, and fi-
nally, adjusting the control laws with respect to the
context in order to keep a high quality of control with
the AdaptativeController.
IMOCA is useful for targeting different appli-
cation domains like the control of underwater and
terrestrial vehicles, sailing boats, flying drones or
embedded scientific stations with various sensors
because the system is always controlled by the
ReactiveController at a frequency close to that
of the sensors, the control law is chosen by the
ExpertController which reacts to its environment
by switching from a law to another more adapted law
and the parameters of these laws can be adjusted ac-
cording to the environment features. These applica-
tions may use various platforms like arduino boards,
ARMadeus boards, Lego NXT bricks or mini PC with
various firmwares and operating systems. If IMOCA
serves for modeling of the control architecture of such
applications, it is not designed for generating code
and for facing the platforms heterogeneity. For this
purpose another model, called ImocaGen, is dedi-
cated to consider these aspects.
3.2 ImocaGen: Model for Code
Generation
The generated code depends on platforms, operating
systems, programming languages and communication
technologies. In order to avoid implementation de-
tails in IMOCA, the meta-model ImocaGen includes,
in addition of IMOCA itself, a model of technical as-
pects.
In the ImocaGen meta-model (see figure 3) the
MODELSWARD 2016 - 4th International Conference on Model-Driven Engineering and Software Development
392
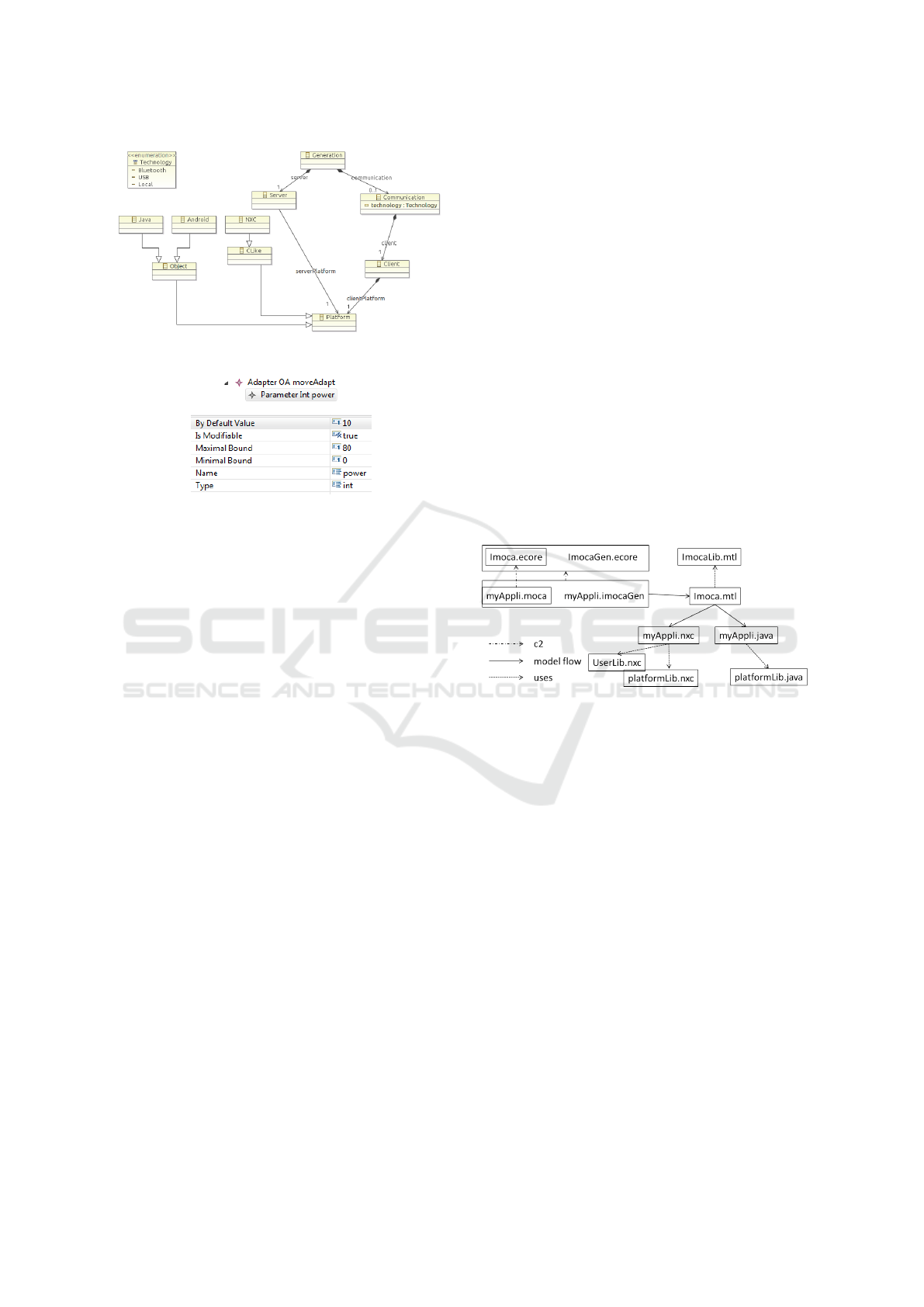
Figure 3: ImocaGen meta-model.
Figure 4: Modifiable parameters.
control system is represented by the server (the em-
bedded system) and the client (the remote controller).
If a client exists, a communication protocol is de-
fined with the help of different technologies like Blue-
tooth or USB. Platforms are mainly taken into account
through the supported programming languages. Two
main families are defined, C-like languages and ob-
ject oriented languages, the former contains NXC (for
Not eXactly C) a high-level C-like programming lan-
guage for the Lego Mindstorms NXT and the latter
contains Android which is not a programming lan-
guage. For the generator, the interesting informa-
tion about Android is the usage of the virtual machine
Dalvik which allows to run Java code.
At architectural level, for a parameter, the prop-
erty IsModifiable allows to declare it reconfig-
urable. If an IMOCA parameter is reconfigurable,
ImocaGen defines a set of reconfiguration features,
used for code generation, like minimal and maximal
bounds (see figure 4). If at least one reconfigurable
parameter exists, a client interface is generated to al-
low the tuning of the values of reconfigurable param-
eters. In the embedded code, a server task receives
the changes and modifies online the corresponding
parameters. This interface is especially useful during
prototyping stage. Thus, the behavior of the system
can be tested without stopping or recompiling the ap-
plication (Navas et al., 2013).
4 CODE GENERATION
IMOCA and ImocaGen are designed with the
help of Ecore the core meta-model of EMF
(Eclipse Modeling Framework). It is impor-
tant to notice that Imoca.ecore is a part of
MyImocaGen.ecore. So MyAppli.Imoca is used to
initialize MyAppli.ImocaGen (see figure 5).
From this model, Acceleo modules
(ImocaGen.mtl) are used to generate code. Ac-
celeo is a code generator from the Eclipse Foundation
based on the model-to-text (M2T) transformation.
The generator produces both embedded C-like
code and Java code and more generally all the files
structure as well as the code which describes the
behavior of the application. The code generator is
modular, based on a code generation library called
LibImoca.mtl. The generated code allows to inte-
grate two kinds of legacy code: platform dependant
code (ImocaLib.nxc) and specific domain code
(UserLib.nxc).
Figure 5: Code generation process.
4.1 Platforms and Languages
Integration
In embedded system domain, the C language is used
classically for efficiency. Although the targeted plat-
forms support various programming languages thanks
to various IDE and compilers, most of them offer the
possibility of using a C-like language. However, ver-
sions of C are slightly different from one platform
to another. Therefore the generator is forced to use
a subset of C, the common part of different C vari-
ants for targeting different platforms. For the simula-
tor written in Java, the generator exploits the fact that
Java syntax and C syntax are close for factorizing as
much as possible their common part.
The generator is composed of three software lay-
ers. The first layer is platform specific. It is in charge
of generating the files. Indeed, the set of files may
vary between the chosen programming languages. A
C project contains header and implementation files
whereas a Java project is organized in packages and
ImocaGen: A Model-based Code Generator for Embedded Systems Tuning
393
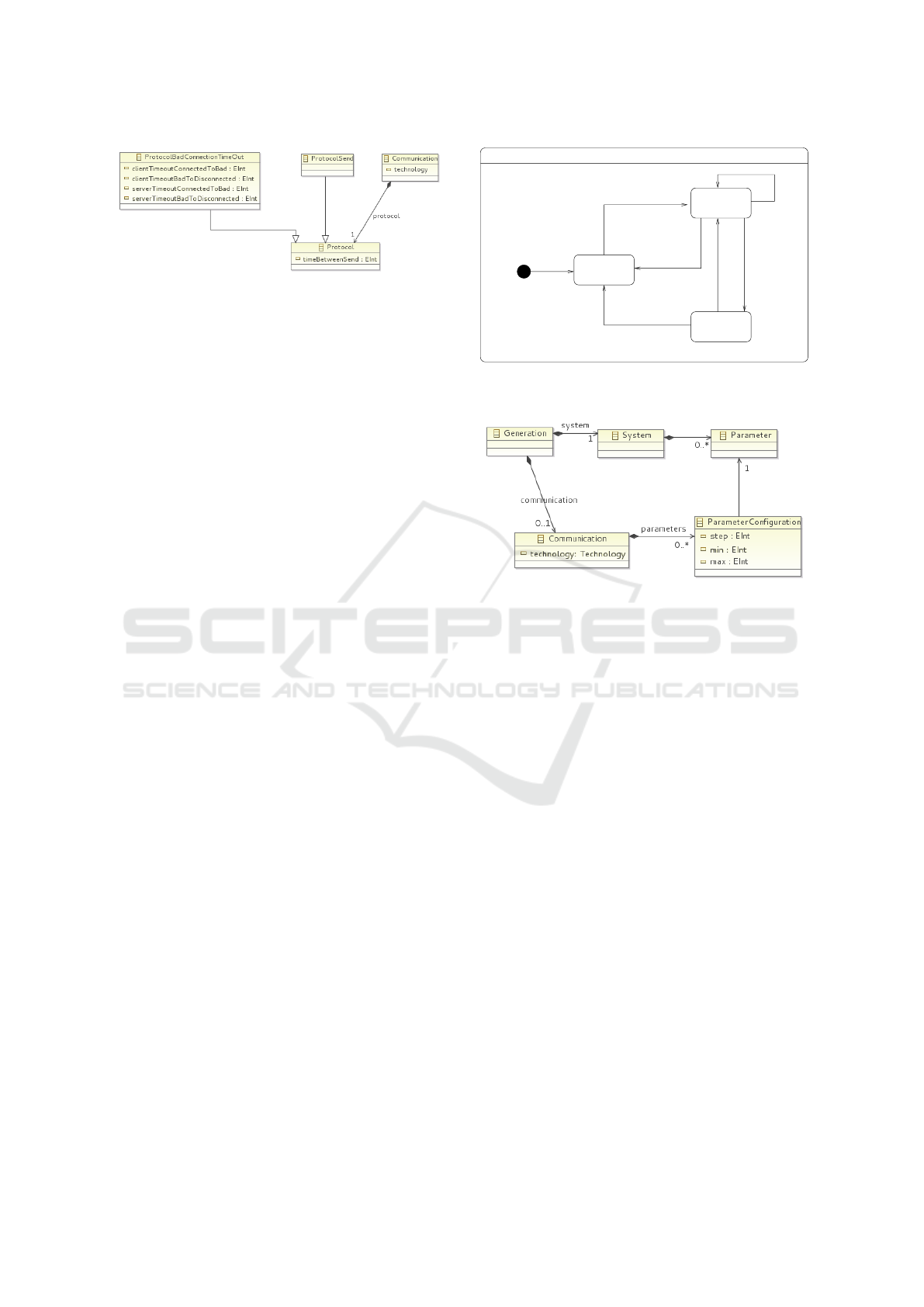
Figure 6: Communication protocol.
classes. For NXC only implementation files are gen-
erated. In C, data is a variable whereas, in Java, a data
is viewed as an object, an attribute with setters and
getters.
The second layer is a generic layer for generat-
ing all that is common to C and Java. The generated
algorithms (expert and adaptive controllers) are inde-
pendent of platforms and, therefore, are written in a
basic C, without pointers and specific C. This code
describes the structure and the behavior of the appli-
cation.
The last layer is platform specific and is in charge
of the syntax of the languages (declaration, function
calls, ...). In particular, it tries as much as possible
to factorize the common parts of imperative code and
object oriented code (through a parameter with speci-
fies the type of the language) by exploiting some sim-
ilarities between C and Java.
4.2 Remote Control Integration
In the targeted application domain, interaction with
the embedded system is done through a wireless com-
munication. The code generation provides a graphical
user interface (GUI) and a communication protocol,
depending on the Client declaration. In the Imoca-
Gen meta-model (see figure 6) a Communication
contains a Protocol which defines all the technical
characteristics. The protocol defines how to estab-
lish the communication, how to stop it and how to
ensure the data correctness. It also defines frames,
messages format and parameters about the maximal
size of a packet and timeouts (to detect commu-
nication loss). The timeout aspect is modeled by
the ProtocolBadConnectionTimeout class in the
ImocaGen metamodel.
The code generation consists on instantiating a
generic protocol. The client sends frames (connec-
tion and requests) to the server periodically. Then it
waits for a response. If the client, resp. the server
has nothing to send, resp. to answer, it has to trans-
mit a null message. Then, as presented in figure 7,
timeout is used to detect connection loss. The con-
nection state information is available for both client
and server sides. The proposed protocol is well suited
Disconnected
Any message
CONNECT
Bad reception
Connected
States
No connection for t2 s
No connection for t1 s
Any message
DISCONNECT
Figure 7: The three states of the protocol BadConnection-
Timeout.
Figure 8: Remote control and parameters reconfiguration.
to a system which evolves in a natural environment
where several events may disturbed communications.
Indeed, if necessary, ImocaGen may be extended to
model other kind of communication policies.
For each reconfigurable parameter, a
ParameterConfiguration (see figure 8) de-
tails all the necessary elements for defining the
interaction policy: minimal, maximal and the step
between two consecutive values. The generation of
a dedicated widget is automatically performed for
each reconfigurable parameter. When a parameter
modification is performed on remote side, it initiates
a client/server communication. Technically, an
identifier (ID) is generated for each reconfigurable
parameter and allows to do the link between the client
and the server.
As for protocol, the remote client code is in fact
a parameterization of an existing generic code. For
example the InitServer primitive has two parame-
ters, the first one defines the reception timeout and the
second one the disconnection timeout. The function
CreateMessage takes an ID as parameter for identi-
fying the request. The creation of a widget is based
on a name, an ID, a type (int, float ...), a minimal, a
maximal and a step value.
From structural point of view, the generic code is
based on provided libraries fo each platform. The li-
brary interface is a facade to set the application de-
MODELSWARD 2016 - 4th International Conference on Model-Driven Engineering and Software Development
394
pendent characteristics, i.e. the name and the number
of widgets for the GUI. The implementation of the
library is based on two layers. The first layer imple-
ments the behavior and is generic. The second layer
is platform dependent, encapsulating technologies de-
tails. GUI description, send/receive message primi-
tives belong to this layer.
4.3 Domain-specific Code Integration
The generated code is a wrapper for user code. The
user code integration finalizes the application. Al-
though Acceleo proposes specific mechanisms for
user code integration, in ImocaGen, the user code in-
tegration mechanism is based on the delegation pat-
tern (see figure 9) for a better independence between
user code and generated code. In the classification
proposed in (Greifenberg et al., 2015), this type of
mechanism is merely called delegation.
UserLib calls
Delegator
handwritten code
UserLib
Delegate
UserLibInterface
generated code
generated code
1
1
creates
Figure 9: Delegation pattern.
A delegator performs specific function calls in
a normalized way. More precisely, a delegator in-
vokes methods which are declared in an interface im-
plemented by a delegate. Then the delegator del-
egates the task to a delegate. The method calls
are generated by the code generator. The interface
UserLibInterface gives all the signatures of func-
tions and is also generated by the generator. Fi-
nally, the user only has to provide an implementation
of the interface in the UserLib file while respecting
the given signatures. This approach, based on the
component-based paradigm, ensures a high-level of
encapsulation and a clear separation between gener-
ated and user code.
5 APPLICATION
In this section, we present a basic and illustrative ap-
plication in the NXT world: an arm equipped with a
gyrometer and a compass, controlled by a rotate mo-
tor (see figure 10). In an horizontal plane, the arm has
Figure 10: The NXT brick and the compass needle.
to indicate always the north even if the device moves:
the arm plays the role of a compass needle.
For controlling the arm we use a simple PID reg-
ulator:
θ = P(heading − 180)+ I
∑
e + D.gyr
where θ is the angle command of the motor, heading
the value provided by the compass, gyr the value of
the gyrometer and e the error between heading and
the desired direction. The error accumulation is cal-
culated over the last ten seconds. The setpoint is 180
in order to avoid the jump between 359 and 0, but if
the compass side of the arm points out the south, the
other side shows the north.
Finding out good values for P, I and D is generally
a long and tedious task, especially in a disturbed en-
vironment because physical models are generally far
to the reality and numerous phenomena are difficult
to simulate and forecast. With ImocaGen, a GUI is
generated with a widget for each of these parameters
and a widget for the motor (to set its power). Using
the GUI helps on tuning the system.
For this application three kinds of communication
(local, USB and Bluetooth) have been tested by us-
ing ImocaGen. For local communication, a simulator
code is generated in Java. The simulator involves a
widget for each sensor in order to set the correspond-
ing value. Four sliders are generated, one for each
reconfigurable parameter: P, I, D and the power of the
motor. The simulator allows to watch the response
of the system to given inputs. It helps to test and
debug the application behavior. The user interface
platform library is based on the SWT library. Using
the USB communication allows to test the applica-
tion on the real embedded system (generation of NXC
code). The client platform is a PC and the generated
code for the GUI is the same as for local (Java code)
except that it does not simulate sensors. A widget
is generated for each reconfigurable parameter. For
the Bluetooth communication, the client platform is
an Android tablet. On the tablet, when the client is
ImocaGen: A Model-based Code Generator for Embedded Systems Tuning
395

launched, a configuration file is needed for the GUI
initialization. Therefore the generator generates only
a file ConfigClient.java to store into the Android
application. Finally, thanks to the tuning tool, the pa-
rameters of the control application can be fixed and
an embedded code can be generated.
6 CONCLUSION AND FUTURE
WORKS
The architecture model IMOCA is designed to
process control systems in disturbed environments
whereas ImocaGen, which includes IMOCA, is a
model of code generation for multiple platforms.
ImocaGen allows to generate both embedded C-like
code and tuning and control tools in Java. It also inte-
grates a communication model for managing the com-
munications between the control application and the
tools. The tools are useful to test the behavior of the
system and to allow system evaluation.
This work has several extensions. Other platforms
and domains are targeted thanks to the development
of specific libraries, as well as the evolution of the
ImocaGen meta-model. The quality and the efficiency
of the generated code is another challenge because of
the embedded platforms constraints. Integrating real-
time aspects is also an ongoing work.
REFERENCES
Alonso, D., Vicente-chicote, C., Ortiz, F., Pastor, J., and Al-
varez, B. (2010). V
3
cmm: a 3-view component meta-
model for model-driven robotic software develop-
ment. Journal of Software Engineering for Robotics,
1(1):3–17.
Collett, T. H., MacDonald, B. A., and Gerkey, B. P. (2005).
Player 2.0: Toward a practical robot programming
framework. In Proc. of the Australasian Conf. on
Robotics and Automation (ACRA), Sydney, Australia.
DeAntoni, J. and Babau, J.-P. (2005). A MDA-based ap-
proach for real time embedded systems simulation.
In Proceedings of the 9th IEEE International Sym-
posium on Distributed Simulation and Real-Time Ap-
plications, pages 257–264, Montreal. IEEE Computer
Society.
Dhouib, S., Kchir, S., Stinckwich, S., Ziadi, T., and Ziane,
M. (2012). RobotML, a Domain-Specific Language
to Design, Simulate and Deploy Robotic Applica-
tions. In Third international conference on Simula-
tion, Modeling, and Programming for Autonomous
Robots (SIMPAR’12), Lecture Notes In Computer
Sciences, pages 149–160, Tsukuba, Japan. Springer-
Verlag.
Greifenberg, T., H
¨
olldobler, K., Kolassa, C., Look, M.,
Nazari, P. M. S., M
¨
uller, K., P
´
erez, A. N., Plotnikov,
D., Reiss, D., Roth, A., Rumpe, B., Schindler, M.,
and Wortmann, A. (2015). A comparison of mecha-
nisms for integrating handwritten and generated code
for object-oriented programming languages. CoRR,
abs/1509.04498.
Guillou, G. and Babau, J. (2013). IMOCA : une architec-
ture base de modes de fonctionnement pour une ap-
plication de contrle dans un environnement incertain.
In 7
`
eme Conf
´
erence francophone sur les architectures
logicielles, Toulouse France.
Navas, J., Babau, J.-P., and Pulou, J. (2013). Reconcil-
ing run-time evolution and resource-constrained em-
bedded systems through a component-based develop-
ment framework. Science of Computer Programming,
8:1073–1098.
Quigley, M., Conley, K., Gerkey, B. P., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng, A. Y. (2009). Ros: an
open-source robot operating system. In ICRA Work-
shop on Open Source Software.
Ringert, J. O., Rumpe, B., and Wortmann, A. (2013). Mon-
tiArcAutomaton : Modeling Architecture and Behav-
ior of Robotic Systems. In Workshops and Tutorials
: IEEE International Conference on Robotics and Au-
tomation (ICRA) : Karlsruhe, Germany, page 3 S.
Simon, D., Espiau, B., Kapellos, K., and Pissard-Gibollet,
R. (1997). ORCCAD: Software Engineering for
Real-time Robotics. A Technical Insight. Robotica,
15(1):111–115.
Szyperski, C., Gruntz, D., and Murer, S. (2002). Com-
ponent Software: Beyond Object-Oriented Program-
ming. ACM Press and Addison-Wesley, New York,
NY, 2 edition.
Utz, H., Sablatnog, S., Enderle, S., and Kraetzschmar, G.
(2002). Miro - middleware for mobile robot applica-
tions. Robotics and Automation, IEEE Transactions
on, 18(4):493–497.
MODELSWARD 2016 - 4th International Conference on Model-Driven Engineering and Software Development
396
