
Analysis of Aggressive Driver Behaviour using Data Fusion
Juan Carmona, Fernando García, Miguel Ángel de Miguel, Arturo de la Escalera
and José María Armingol
Intelligent Systems Lab, Universidad Carlos III de Madrid, Butarque, 15, Leganés, Madrid, Spain
Keywords: Driver Education, CAN-Bus, Human Factor, Driver Behaviour.
Abstract: This work describes recent advances in the analysis of driver aggressiveness in real road environments, based
on on-board sensors, and Inertial Measurement Unit (IMU) with GPS information. In order to provide driver
behaviour identification, a low-cost hardware architecture had been developed to retrieve Controller Area
Network (CAN) Bus information. These data, combined with the IMU and the GPS, allow to provide driver
behaviour identification. Therefore, features such as steering angle, throttle pressed percentage, linear
accelerations, etc. are fused to classify driver behaviour through an expert system. This development has been
exposed in real-traffic situations, with 10 different drivers. Tool showed, will allow researchers, drivers, and
insurance companies to better understand risky driving behaviours.
1 INTRODUCTION
Traffic accidents are a major cause of injury and death
in the world. With the increase in the number of
vehicles, the protection of pedestrians and vehicle
users is one of the priority topics for vehicle
manufacturers.
Road accidents cause around 1,275,000 deaths per
year, according to (OECD 2014). Inappropriate speed
was a factor in nearly 35% of fatal accidents and
about 16% of injury accidents in 2012. Velocity, in
combination with other high-risk behaviours, is often
cited as a factor in these accidents.
A traffic accident is the result of the coincidence
of a series circumstances related to users, vehicles,
infrastructure, traffic and environment giving rise to
an unforeseen event of circumstances. It is well
established that in a very high percentage, the main
factor is related to the human factor. But not only
deaths occur in accidents, there is also a much larger
number of injured. It is estimated that around 50
million people are injured in road accidents every year.
According to the World Health Organization
(Toroyan et al. 2015)road accidents are the leading
cause of death among young people aged between 15
and 29 years, and cost governments approximately 3%
of GDP. It is clear that an urgent solution is required.
Recent studies focused on driver behaviour
modelling, such as analysis and modelling of
behaviour (Belén et al. 2014) with a Gaussian
Mixture Model (GMM) based on a framework with
driving signals (e.g., following distance, vehicle
speed). Human behaviour modelling and prediction
system is presented in (Pentland and Liu 1999)based
on a set of dynamic models, sequenced together by a
Markov chain with driving signals (e.g. steering
wheel angle, brake position, and accelerator position).
Other examples in literature also try to provide added
value based on on-board sensors, (Wakita et al. 2005)
provides driving pattern based identification of
driver. (Krajewski et al. 2010) provides driver's
fatigue identification based on information of the
steering wheel movement, and similar approach is
presented by (Takei and Furukawa 2005). Finally,
(Choi et al. 2007) provides behaviour analysis based
on the CAN-Bus information by the use of Hidden
Markov Models (HMM).
Motivation and Objectives
In order to reduce the death toll, driver behaviour
identification can help to identify misbehaviours or
changes in the attitude due to secondary tasks,
fatigue, or urgency to reach to the destination,
provoking erratic, or even aggressive behaviours
(Shinar 1998). Furthermore, an integrated system that
allows drivers to check their own driving experience
through recorded notes, related to risky driving
behaviour, and instructions of how to improve their
behaviour, may help them to improve and encourage
safe driving habits.
Carmona, J., García, F., Miguel, M., Escalera, A. and Armingol, J.
Analysis of Aggressive Driver Behaviour using Data Fusion.
In Proceedings of the International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2016), pages 85-90
ISBN: 978-989-758-185-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
85
The main objective of this work is to characterize
the effect of aggressiveness behaviour in driving
signals such as speed, lateral and longitudinal
accelerations, and etcetera. Here, we propose a
theoretical model describing this effect and test
against real driving scenarios with different drivers,
vehicles and road types (round, straight, curved, etc.).
The second objective is to identify aggressive
behaviour in a real roads experiments.
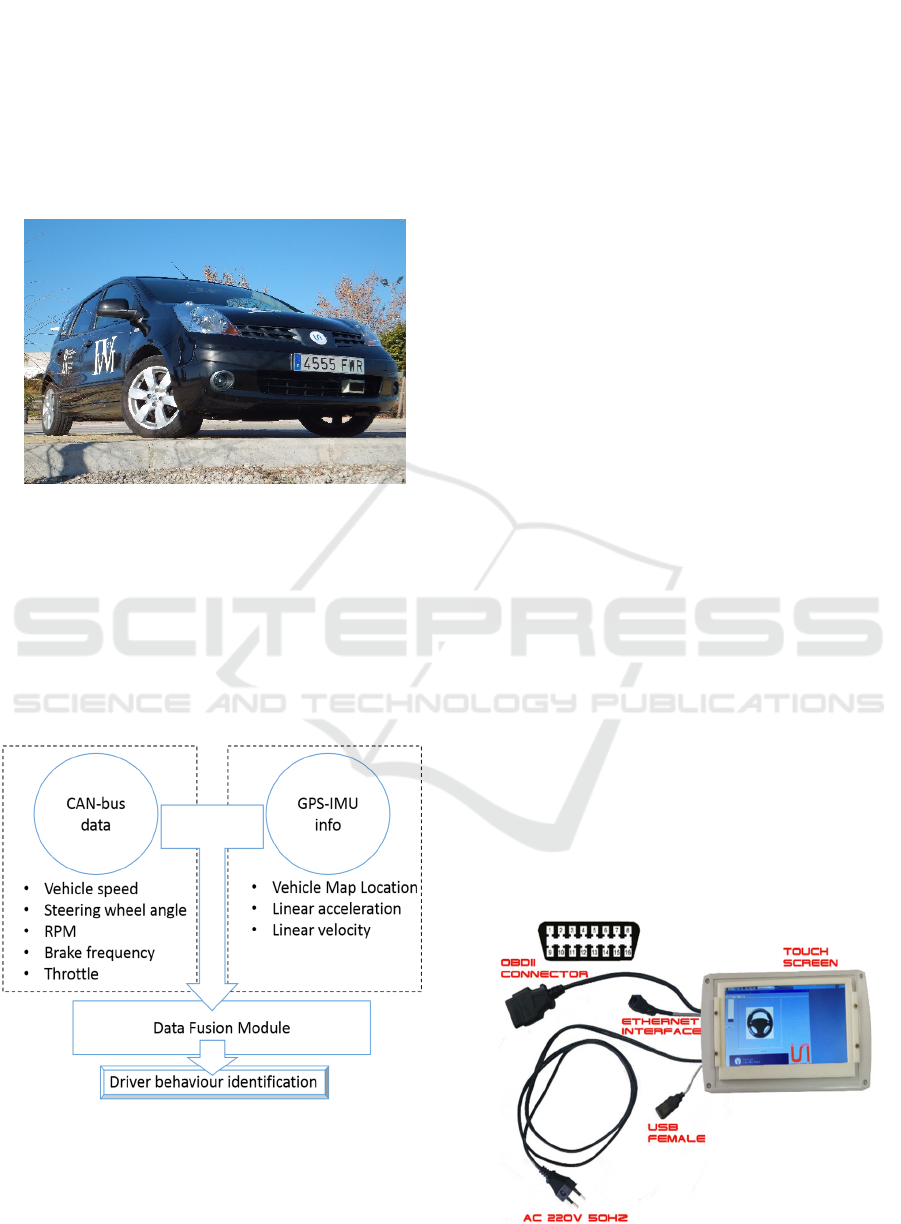
Figure 1: IVVI 2.0: research platform.
2 GENERAL DESCRIPTION
This work is included in the platform Intelligent
Vehicle based on Visual Information (IVVI) 2.0
(Martín et al. 2014), Figure 1. This project is
developed entirely at the Intelligent Systems
Laboratory, Universidad Carlos III de Madrid.
Figure 2: Information flow provided by CAN-Bus and
GPS-IMU ground-truth device.
IVVI 2.0 is a research platform created to test and
develop different Advanced Driver Assistance
System (ADAS) technologies.
At this moment, different sensing capabilities are
being researched, including road lane detection;
pedestrians, vehicles and traffic signs detection and
identification, driver monitoring and advance
positioning and odometry systems (Martín et al.
2014). All of them focused on the development of
computer vision algorithms and data fusion techniques.
In order to provide driver behaviour
identification, a novel hardware-software architecture
was designed. It acquires real-time information from
the CAN-Bus related to the driver manoeuvres
(steering wheel, braking pedal, throttle pedal...) and
vehicle state (speed, rpm.) and sends it to the main
data processing unit, available in the platform,
through TCP/IP connection. This information is later
fused with on board inertial Measuring Unit (IMU)
and Global Positioning System (GPS). The
processing unit, included in IVVI 2.0 is based on
Robotic Operative System (ROS) for data acquisition
and synchronization (Quigley et al. 2009) ROS
allows a collection of tools that aims to simplify the
complex task of global data acquisition and
synchronization of sensors.
Driver behaviour is divided into aggressive and
normal (not aggressive). Furthermore different
scenarios according to the location (i.e. urban,
interurban, or highway) are defined.
3 HARDWARE ARCHITECTURE
The aim of this study is to understand and identify the
behaviour of drivers by the use of the available
information in the vehicle. The CAN-Bus provides a
reliable and adequate source of information, instead
of adding additional sensors. Furthermore, data
obtained from GPS and IMU devices, is merged to
achieve the objective of this work, to classify the
driver behaviour.
Figure 3: Full driver monitoring system module.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
86
3.1 Simba
CAN-Bus carries vital information, such as engine
temperature, air pressure, and monitoring fuel, which
reflects the current condition of the vehicle.
Furthermore, it carries information regarding to the
driver direct manoeuvre such as steering wheel angle,
speed, braking, throttle pedal, etc. All this
information can be accessed through the on-board
diagnostic port (OBD II).
In order to acquire this CAN-Bus information an
embedded device was developed, able to acquire and
process CAN-Bus data, without interfering with the
CAN-Bus car line. The system named SIMBA which
is the Spanish acronym for Bidirectional Integrated
Monitoring System for Automobile is an original
IVDR.
Most of relevant information is transported
through high speed CAN-Bus, the transmission
protocol is described in ISO 11898 (ISO 11898 2003),
however decoding work to identify the data
information had to be carried out.
All the information is retrieved via the high speed
bus at 500 kbps. However, the device is designed to
read/write up to 1024 kbps. SIMBA includes a touch
screen, Ethernet interface, USB female and a power
supply, Figure 3.
The developed software provides on-line and off-
line data processing. For the first, real time information
is sent to the IVVI 2.0 server by Ethernet and TCP/IP.
Thus, each CAN-Bus message is entered as a
“message” under the given topic in ROS architecture.
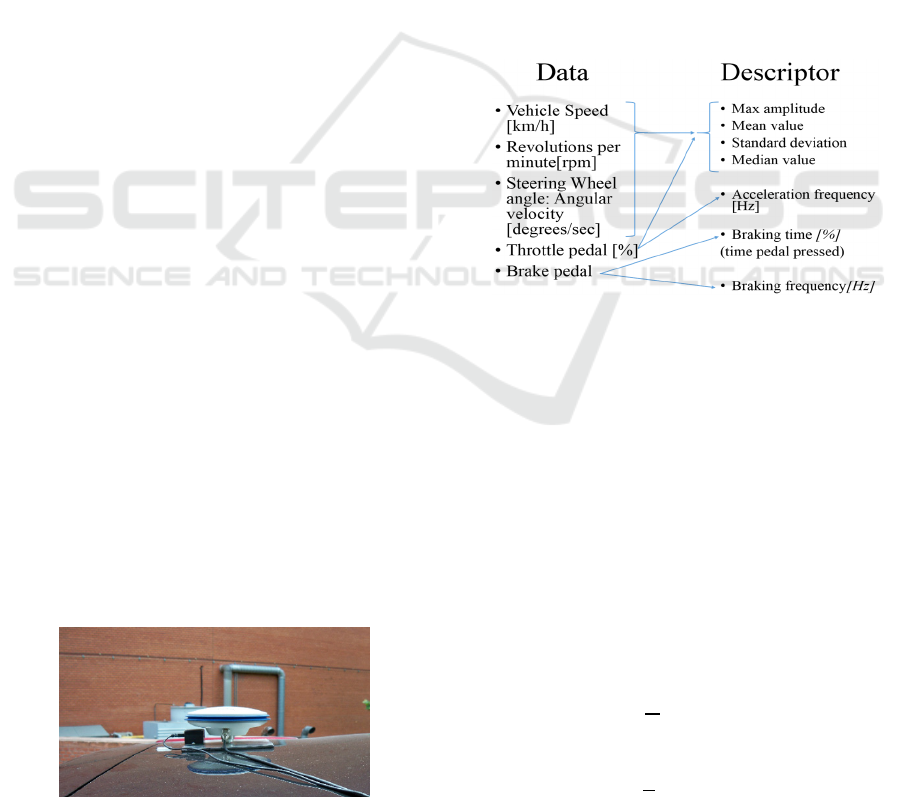
3.2 GPS+IMU
This subsystem is formed of two devices, a
Differential Global Position in System (DGPS) and
an IMU. The DGPS is composed of a base station that
transmit differential corrections in real-time. The
accurate localization is used to identify environments
based on digital maps. The IMU has embedded
accelerometers and gyroscopes, all of them are
embedded in a compact enclosure for outdoor
applications (model: Flex Pak-G2-VG), as showed
Figure 4.
Figure 4: GPS + IMU module set up on IVVI 2.0 roof.
Precision technical data are summarized in a
DGPS using L1 C/A-code mode data for differential
solution, where the accuracy is less than 1 m. IMU
module integrates a triaxle accelerometer, triaxle
gyroscope and triaxle magnetometer, with an
acquisition frequency up to 100Hz.
4 SOFTWARE MODULE
The software module is characterized by the use of an
expert system for driver behaviour identification. The
intelligent approach is based on the use of signal
descriptors, which identifies specific patterns in the
driver's behaviour. The descriptors are obtained in
both time and frequency domains, which are later
used to identify different features for the intelligent
detection system. Thus, deliberation behaviour is not
based in the sole information of a single signal, but
the fusion of the different descriptors.
Figure 5: Descriptors used, extracted from CAN-Bus
module.
4.1 CAN-Bus Descriptors
Information in time domain from CAN-Bus is related
to the statistical information of the signal. It is
integrated into a predefined time window that gives
an estimation of the driver behaviour on the defined
time. The descriptors used are different according to
the signal used, as presented in Figure 5.
Descriptive statistics summarize large sets of
quantitative information. Central tendency refers to
the idea that there is one number that best summarizes
the entire set of measurements. For our algorithm mean
and median have been used, equation 1, 2.1 and 2.2.
1
_
(1)
χ
2
1
(2.1)
Analysis of Aggressive Driver Behaviour using Data Fusion
87

χ
2
2
1
/2
(2.2)
Dispersion tells us how spread all the
measurements are, from the defined value i.e.
standard deviation.
1
̅
(3)
Specific descritor according to the type of
information where also added, e.g. throttle pedal
signal, which not only has been processed with
statistical descriptors, it was obtained the press
frequency.
#
(4)
Braking signal had specific descriptors due to its
binary nature (pressed/not pressed) i.e. braking time
(time pedal pressed) [%], as given in equation (5), and
braking frequency (times pedal pressed) [Hz], as
shown in equation (4) for throttle pedal.
(5)
4.2 GPS+IMU Descriptors
Accelerations are important to measure the comfort
level of the vehicle occupants. Linear accelerations in
three axes can be acquired from the IMU sensor. Due
to the ground nature of the vehicle displacement,
vertical axis was discarded from the system.
Figure 6 displays, the use of some central
measurements (mean, median) and a statistical
dispersion (standard deviation) for accelerations.
GPS coordinates had been entered into the system,
thanks to digital maps, it can be used to label the
environment, and to acquire the maximum speed
allowed.
Figure 6: Descriptors used, extracted from GPS + IMU
module.
5 TEST
Different routes were tested, as shown in Figure 7
where it is displayed an example of urban
environment. The route includes different traffic
situations, such as curves, lines, roundabouts, traffic
lights, stops and overtaking manoeuvres. The length
of the route was variable, depending on the type of
environment, but fixed for all drivers. The weather
conditions where sunny and dry. Sequences were
conducted during July 2015. Ten different drivers
were involved in performing the experiments, driving
the same car, IVVI 2.0.
Figure 7: Driving Scenarios.
Each of the drivers made a round of aggressive
driving and a series of rounds of smooth driving;
depending on the driver.
They were not given any prior definition, or
suggestions about aggressive driving.
Figure 8: R.P.M, (standard deviation), for three subjects (A,
B, C). First row: urban environment, second row interurban
environment.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
88

6 RESULTS
First, we analysed the features of driver behaviour
with different labelled sequences (aggressive and
non-aggressive). Data was collected and descriptor
computer in temporary windows of 20 seconds, with
a 50% overlap.
The data collected is shown in Figures 8 to 12,
where red colour represents the information obtained
for an aggressive driver, and blue colour represents a
normal driver (non-aggressive) behaviour.
Figure 9: Mean for throttle signal for three different.
Drivers (A, B, C). First row: urban environment, second
row interurban environment.
In urban environment with more “stop & go”
manoeuvres, the standard deviation could be a good
tool to classify the grade of aggressiveness. In other
scenarios such as motorways, central values provide
more information. Figure 8 compares the standard
deviation for R.P.M, with aggressive and non-
aggressive drivers using the same vehicle route for
three different drivers. It was noted, while performing
aggressive driving, drivers reach to a level over 400
R.P.M. In this case, we implemented a threshold,
shown in green line.
The goal is to create a robust system, merging
different signals, from different sources, explained in
previous sections. Thus further information is needed
in order to provide accurate information.
Figure 10: Mean for Vehicle speed in a 20s time window.
Maximum speed of the road: 50km/h.
Throttle pressed information, may show a lack of
driving stability. As Figure 9 shows, mean value for
throttle signal present values much higher for
aggressive conditions. This is especially useful to
highway environments, where R.P.M, is much more
stable.
Figure 11: Plotting STD for longitudinal axis, principal
movement. First row: urban environment, second row
interurban environment.
Displayed in Figure 10, the vehicle speed mean
value is interesting if we know the maximum allowed
in the road. This is possible thanks to the GPS signal
and digital maps. The algorithm determines
aggressive driver as a driver who exceeds the speed
of the road, according to the average of the defined
window. As it stated in the introduction section, speed
is often cited as a factor in aggressive behaviour, i.e.
speed is a critical feature. Here, the maximum speed
was highlighted in pink. Automatically labelling as
aggressive a driver who exceeds the legal speed
several times during a time window.
Further CAN-Bus signals, such as steering wheel
movement (angular speed) show higher values for
aggressive driver behaviour. This information,
together with IMU information, can help to identify
misbehaviours due to strong lateral movements. Tests
evidenced standard deviation represented better
descriptor in all environments for IMU data, as Figure
11 and Figure 12 show for longitudinal and lateral axis.
Figure 12: Local peaks in lateral axis, obtained by IMU
hardware for three different drivers (A, B, C). First row:
urban environment, second row interurban environment.
Analysis of Aggressive Driver Behaviour using Data Fusion
89

7 CONCLUSIONS
The work presented represents a step forward in
several fields, with an extent field of application,
including insurance companies, public entities,
human factors research and etcetera.
Intended to be used in any vehicle, the system is
a low-cost device for driver monitoring through
CAN-Bus information and on-board sensors. The
application is based on data fusion techniques with
temporal and frequency descriptors, merged in a crisp
ruled-based expert system.
Results section showed an important point to be
taken into account, the necessity of multiple signals
in order to provide an accurate identification.
Analysis based on a single signal, can lead to
misinterpretation, e.g., a non-aggressive driver
having constant speed changes due to the situation of
the urban environment.
Future works will focus on the addition of further
information already available in the vehicle, such as
visual information based on advanced perception
systems, already available in the IVVI 2.0 platform.
ACKNOWLEDGEMENTS
This work was supported by the Spanish Government
through the CICYT project (TRA2013-48314-C3-1-
R) and DGT project (SPID 2015-01802).
REFERENCES
Belén, A. et al., 2014. Modeling and Detecting
Aggressiveness From Driving Signals. , 15(4),
pp.1419–1428.
Choi, S. et al., 2007. Analysis and classification of driver
behavior using in-vehicle can-bus information.
Biennial Workshop on DSP for In-Vehicle and Mobile
Systems, (November 2015), pp.17–19.
ISO 11898, 1993, 2003. Road vehicles - interchange of
digital information - controller area network (can) for
high-speed communication,
Krajewski, J. et al., 2010. Detecting Fatigue from Steering
Behaviour Applying Continuous Wavelet Transform.
Proc. Measuring Behaviour, pp.326–329.
Martín, D. et al., 2014. IVVI 2.0: An intelligent vehicle
based on computational perception. Expert Systems
with Applications, 41(17), pp.7927–7944. Available at:
http://linkinghub.elsevier.com/retrieve/pii/S09574174
14003947 [Accessed October 28, 2014].
OECD, 2014. Road Safety Annual Report 2014 Road
Safety Annual Report 2014.
Pentland, A. and Liu, A., 1999. Modeling and Prediction of
Human Behavior. Neural Computation, 11(1), pp.229–
242.
Quigley, M. et al., 2009. ROS : an open-source Robot
Operating System.
Shinar, D., 1998. Aggressive driving: the contribution of
the drivers and the situation. Transportation Research
Part F: Traffic Psychology and Behaviour, 1(2),
pp.137–160. Available at: http://linkinghub.elsevier.c
om/retrieve/pii/S1369847899000029.
Takei, Y. and Furukawa, Y., 2005. Estimate of driver’s
fatigue through steering motion. 2005 IEEE
International Conference on Systems, Man and
Cybernetics, 2(1), pp.1–6.
Toroyan, T., Peden, M.M. and Iaych, K., 2015. Global
status report on road Safety. Injury prevention : journal
of the International Society for Child and Adolescent
Injury Prevention, 19(2), p.150. Available at:
http://www.ncbi.nlm.nih.gov/pubmed/23513037\nhttp:
//www.who.int/violence_injury_prevention/road_safet
y_status/2015/en/.
Wakita, T. et al., 2005. Driver identification using driving
behavior signals. IEEE Conference on Intelligent
Transportation Systems, Proceedings, ITSC, 2005(3),
pp.907–912.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
90
