
On the Effect of Sensing-holes in PIR-based
Occupancy Detection Systems
Abdelraouf Ouadjaout, Noureddine Lasla, Djamel Djenouri and Cherif Zizoua
CERIST Research Center, Ben-Aknoun, Algiers, Algeria
Keywords:
Wireless Sensor Networks, Building Energy Management Systems, Occupancy Detection, PIR Sensors.
Abstract:
Sensing-holes in PIR-based motion detection systems are considered, and their impact on occupancy moni-
toring applications is investigated. To our knowledge, none of prior works on PIR-based systems consider the
presence of these holes, which represents the major cause for low precision of such systems in environments
featured with very low mobility of occupants, such as working offices. We consider optimal placement of
PIRs that ensures maximum coverage in presence of holes. The problem is formulated as a mixed integer lin-
ear programming optimization problem (MILP). Based on this formulation, an experimental study on a typical
working office has been carried out. The empirical results quantify the effects of the holes on the detection
accuracy and demonstrate the enhancement provided by the optimal deployment of the solution.
1 INTRODUCTION
Detecting user occupancy in buildings is a fundamen-
tal step for reducing wastage of energy and improving
users’ comfort. In fact, in many cases, buildings have
a set of predefined actuation schedules for managing
electrical appliances, such as HVAC and lights. These
schedules have a coarse-grained time dependability
that is generally related to static issues such seasons,
days of the week, etc.. However, by dynamically de-
tecting vacant places, more optimized context-aware
schedules can be implemented that can help shorten-
ing the actuation durations everyday without compro-
mising the users convenience.
Many of the proposed solutions for tracking the
presence of persons in buildings are based on the
use of passive infrared (PIR) sensors (Delaney et al.,
2009; Agarwal et al., 2010; Marchiori and Han, 2010;
Lu et al., 2010; Beltran et al., 2013; Kazmi et al.,
2014). These sensors are made from inexpensive py-
roelectric materials that react to the change of infrared
emissions in the environment, which helps in captur-
ing the presence of humans in a specific space. The
low cost and low energy consumption of such sen-
sors enable their large use in battery-operated sys-
tems. Further, they do not affect the privacy of people
and do not require the presence of an existing infras-
tructure. This makes them an appropriate candidate
for monitoring private spaces such as offices, meeting
rooms, etc., where other technologies, such as cam-
eras, cannot be used.
However, a major drawback of PIR sensors is
their false negatives (non-detection) in some situa-
tions. The first reason behind this shortcoming is
that these sensors are only capable of detecting mo-
tion, and not static bodies. Whilst this does not repre-
sent any problem in some typical places of a building,
such as corridors and near the doors where people are
generally moving, it prevents the accurate monitoring
in places such as offices where workers tend to stay
immobile for relatively long periods. To tackle this
problem, some solutions have been proposed in the
literature that complement the PIRs with information
provided by additional sensors. For example, the oc-
cupancy detection system proposed by Agarwal et al.
(Agarwal et al., 2010) is enhanced with a magnetic
reed switch sensor to track the open/close events of
an office door and match them with the output of the
PIRs. ThermoSense (Beltran et al., 2013) employs, in
addition to a PIR sensor, a thermal sensor array that
can measure temperatures of a 2.5 m ×2.5 m area dis-
cretized as a 8 × 8 grid. Alternatively, some other so-
lutions use other sensing techniques, such as (Nguyen
and Aiello, 2013).
The second problem is that the sensing area of
a typical PIR module is not a contiguous volume,
but it is featured with the presence of several spaces
where changes of infrared emissions are not captured
by the sensor. We refer to these uncovered spaces
by the term of sensing-holes. The dimensions of
Ouadjaout, A., Lasla, N., Djenouri, D. and Zizoua, C.
On the Effect of Sensing-holes in PIR-based Occupancy Detection Systems.
DOI: 10.5220/0005805901750180
In Proceedings of the 5th International Confererence on Sensor Networks (SENSORNETS 2016), pages 175-180
ISBN: 978-989-758-169-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
175
— — —
0.6 m 1.25 m 2.5 m
Sensitivity
Sensing-hole
size
Hand
motion
Arm
motion
Body
motion
(a) (b)
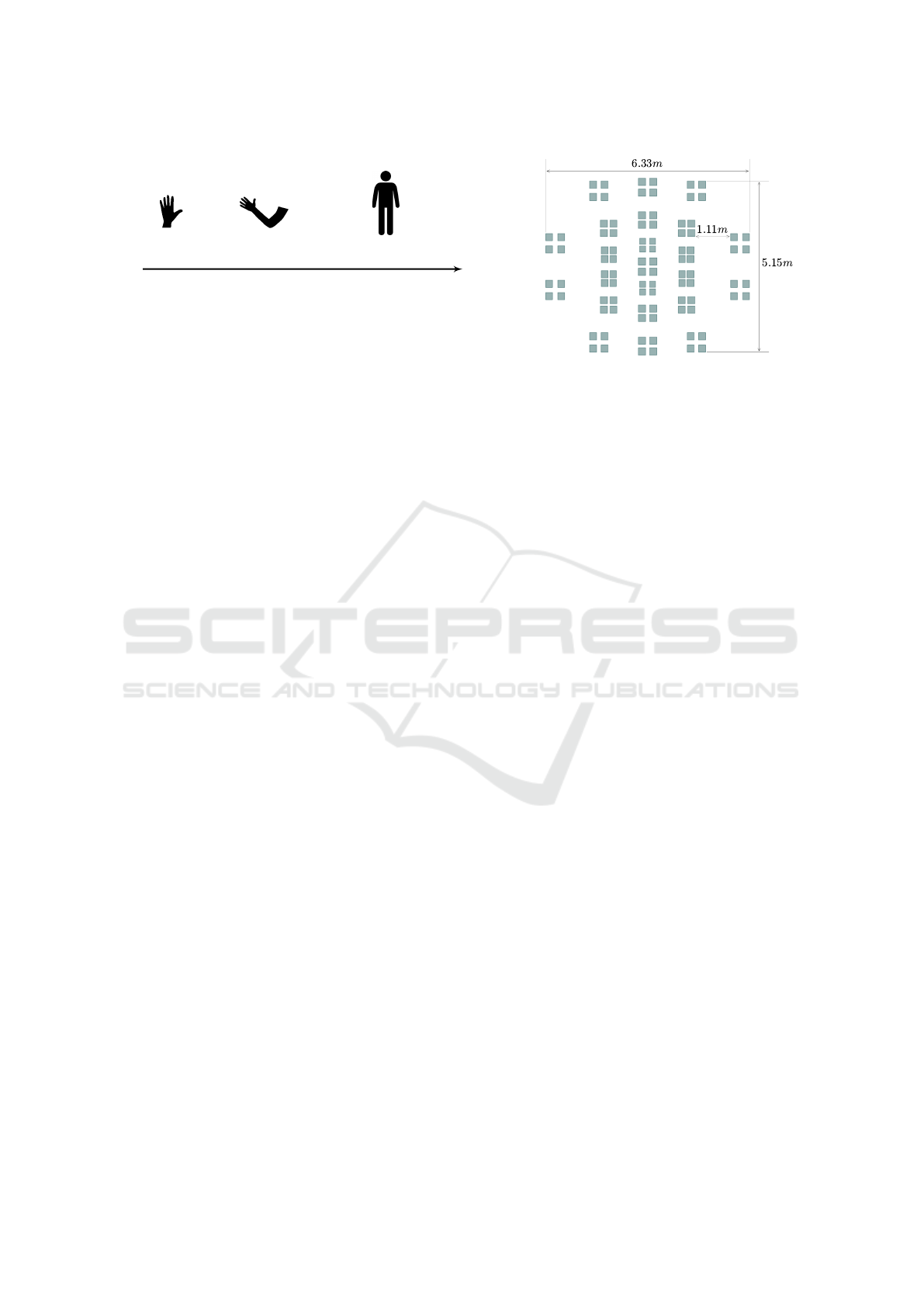
Figure 1: (a) The relation between the size of sensing-holes and motion sensitivity. (b) 2D view of a PIR Field-of-View. Solid
rectangles represent detection zones.
these sensing-holes become larger as we move far
from the sensor, e.g., it reaches the scale of a human
body movements at a distance of 2 m to 3 m, typical
hight of ceiling at offices, where PIRs are usually in-
stalled. Consequently, a PIR cannot detect a person
within the sensing-hole even when he performs small
movements (e.g., in the office scenario, moving his
arms, rotating the chair when sitting, etc.). While it
seems infeasible to detect static body only with PIRs
(the first problem), we think it is possible to tackle
the second one by investigating the sensing-holes and
their impact, and using optimal deployment of PIRs
to eliminate/minimize such holes. This represents the
subject of this work. To the best of our knowledge,
this problem has not been considered previously in
the literature.
The remaining of the paper is organized as fol-
lows, Sec. 2 presents the problem formulation where
the problem of sensing-holes is introduced and PIR
deployment for optimal coverage is modeled as a
mixed integer linear program (MILP). Solution of this
MILP is used in the experimentations, which are pre-
sented in Sec. 3. Finally, Sec. 4 draws the conclusions
and sketches the perspectives.
2 PROBLEM FORMULATION
PIRs use pyroelectric transducers that convert in-
frared radiations into electrical signals. To increase
the PIR sensitivity, a Fresnel lens is used which con-
centrates infrared radiations onto the detector. This
results in a field-of-view (FoV) that is more like a dis-
crete set of beams or cones, including many sensing-
holes. To be detected, the movements of the person
should take place within the FoV. Fig. 1(a) illustrates
the different types of motion made by a human and the
corresponding maximum sensing-hole size for which
the motion can be detected by a PIR (California En-
ergy Commision, 1993). The sensing-holes should
not be more than 0.6 m to ensure an efficient detection
by the PIR of a sitting person’s movements caused by
hand motions.
The size and distribution of the holes impact the
granularity of the PIR detections. Fig. 1(b) illus-
trates the projection of the actual FoV of a Pana-
sonic EKMB PIR sensor on a two dimensional plane
(Panasonic, 2012). The PIR is placed at the ceiling
of an office and the projection is performed on the
plane parallel to the ground and elevated at a typical
height of desks, where most of persons’ low move-
ment activities take place (e.g. arm and hand move-
ment when sitting). The figure shows the presence of
several sensing-holes that represent more than 87%
of the total monitored office area, and their sizes vary
from one region to another within the PIR’s FoV and
can exceed 1 m in some places. These large sensing-
holes can affect PIR-based occupancy detection sys-
tems and cause incorrect decisions to be taken, such
as turning off a light or HVAC in the presence of a
person, which limit the credibility of the system.
To alleviate the negative impact of the sensing-
holes, we define the Maximal PIR Coverage (MPC)
problem that finds the optimal positions of the PIRs
for maximum coverage in the area of interest. To sim-
plify the problem, we do not consider the 3D coverage
but the study herein is limited to the projection of the
covered area on a two dimensional plane as explained
before. Even with such simplification, the computa-
tion of the union of the detection zones for a given
set of PIRs is difficult to formulate mathematically.
Therefore, we discretize the monitored area and con-
sider it as a set of points, where a point will be con-
sidered covered iff it is within the coverage zone of
SENSORNETS 2016 - 5th International Conference on Sensor Networks
176
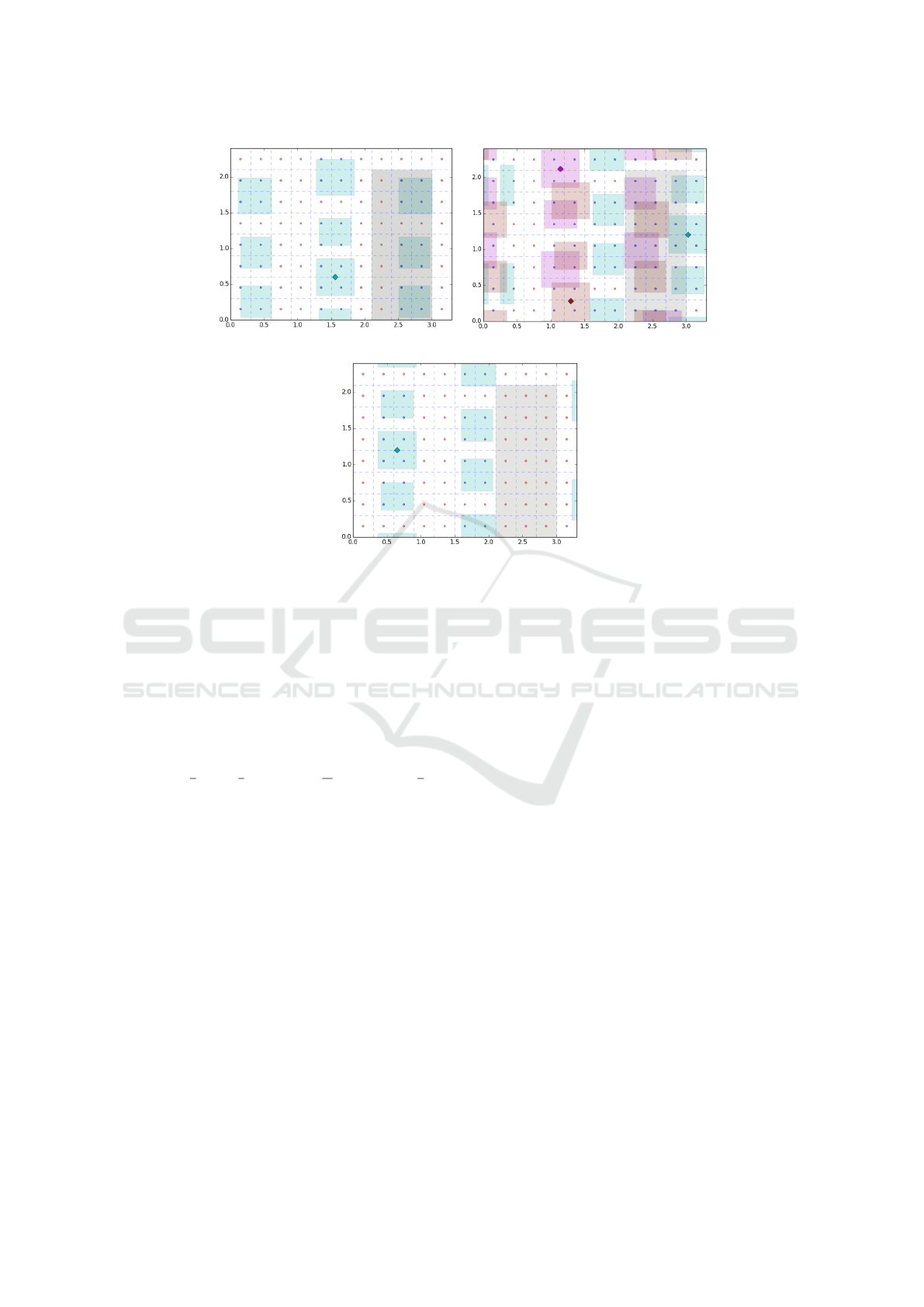
(a) (b)
(c)
Figure 2: Three deployments scenarios considered during the experimentation. Circle points represent the discrete grid of
the deployment area and diamond points represent the PIRs. The gray zone delimits the place of the office’s desk, which has
been given a greater weight in Φ. (a) Optimal deployment with one PIR. (b) Optimal deployment with three PIRs ensuring
full coverage of the desk’s area. (c) Hole-unaware deployment where the desk area is completely uncovered.
at least one PIR. Formally, let D denotes the two di-
mensional space to be monitored by a set, S, of PIRs.
For the sake of simplicity, we assume that D has a
rectangular shape with width W and length L. With-
out loss of generality, we discretize D by dividing its
sides with a step l, which results in a grid of points
˜
D = {(i.l +
l
2
, j.l +
l
2
) | 0 ≤ i ≤ b
W
l
c ∧ 0 ≤ j ≤ b
L
l
c}.
In general, the density of persons in the space
˜
D
is not homogeneously distributed and obstacles (e.g.,
bookshelf, desks, table, etc.) may also be present.
Therefore, we introduce a weighting matrix Φ
(x,y)∈
˜
D
that enriches the geometric deployment space with a
semantic dimension indicating the places where peo-
ple are more likely to be detected. This is by given a
high weight to areas where people are likely to stay
and thus exhibit low movement activity once there
(e.g., area of a desk chair, meeting table chairs), zero
weight at obstacles (e.g., bookshelf, table, etc.), and
regular weight elsewhere where people are likely to
move. We assume that PIRs are placed on the ceil
of the deployment area without any rotation. Con-
sequently, the detection zones of any PIR s ∈ S will
have a rectangular shape and can be modeled by a set
Z
s
⊆ R
4
, where a tuple (x
i
0
, x
i
1
, y
i
0
, y
i
1
) ∈ Z
s
denotes the
boundaries of a single detection zone, z
i
, on the X and
Y , when s is placed at the origin (0, 0). The conse-
quence of a change in the PIR coordinate from the
origin, say to the position (X
s
, Y
s
), is a simple transla-
tion of the zone, z
i
, on the abscissa and ordinate axes,
by, X
s
, and Y
s
, respectively.
The MPC problem can then be formalized as a
mixed integer linear problem (MILP) as follows. We
define the decision variables X
s
and Y
s
for denoting
the coordinates of a PIR s ∈ S, and the binary de-
cision variables C
(x,y)
that indicate wether the point
(x, y) ∈
˜
D is covered by at least one PIR or not. The
objective function can therefore be defined as:
max
∑
(x,y)∈
˜
D
C
(x,y)
× Φ
(x,y)
, (1)
with the following two constraints:
∀(x, y) ∈
˜
D :
C
(x,y)
= 0∨
∃s ∈ S, ∃(x
i
0
, x
i
1
, y
i
0
, y
i
1
) ∈ Z
s
:
(X
s
+ x
i
0
≤ x ≤ X
s
+ x
i
1
)∧
(Y
s
+ y
i
0
≤ x ≤ Y
s
+ y
i
1
)
l (2)
and,
∀s ∈ S :
(0 ≤ X
s
≤ W ) ∧ (0 ≤ Y
s
≤ L).
(3)
On the Effect of Sensing-holes in PIR-based Occupancy Detection Systems
177

The first constraint formalizes that C
(x,y)
= 1 in the
solely case of the existence of at least one detection
zone of a sensor s that covers the point (x, y), while the
second restricts the coordinates of the sensors within
the deployment area. To eliminate the operators ∃ and
∨ in (2), and transform the MILP into a standard form
that can be handled by solvers, the big-M method can
be used.
3 EXPERIMENTS
We have deployed an experimental PIR-based occu-
pancy detection system to monitor an office and quan-
tify the impact of the sensing-holes on the perfor-
mances of the system. The experiments were per-
formed using the EKMB PIR sensors from Panasonic.
The data acquisition mechanism was implemented on
an nRF51-based hardware platform manufactured by
Nordic Semiconductors featuring a low-power SoC
that embeds an ARM Cortex-M0 MCU, along with
a 2.4 GHz wireless transceiver.
The considered deployment area has a rectangular
shape of size 3.3 × 2.4 m
2
. Most of occupants activ-
ity is concentrated over the office desk that received
greater weights in the matrix Φ. The discretization
step l was fixed to 0.3 m resulting in a grid of 11 × 8
points.
We have tested three deployments scenarios. The
first one corresponds to the optimal solution of the
MPC problem when using one PIR. As shown in Fig.
2(a), this deployment covers nearly 63% of the desk’s
area. Optimal full coverage of this space is ensured
with 3 PIRs, which corresponds to our second deploy-
ment scenario depicted in Fig. 2(b). In the third sce-
nario, a single PIR was placed in a way to put the
largest holes at the desk area as shown in Fig. 2(c).
It shows the real impact of sensing-holes on the per-
formances of the detection system. It is worth noting
that existing solutions, by ignoring the presence of the
sensing-holes, consider such deployment as optimal
since the overall sensing range of a single PIR fully
covers the office area.
The deployed motes actively monitor the state of
the PIR and notify a central base station about any
detection event. The latter maintains a database for
logging the incoming sensory data along with ground
truth presence/absence intervals, which are provided
manually by occupants. The experiments were per-
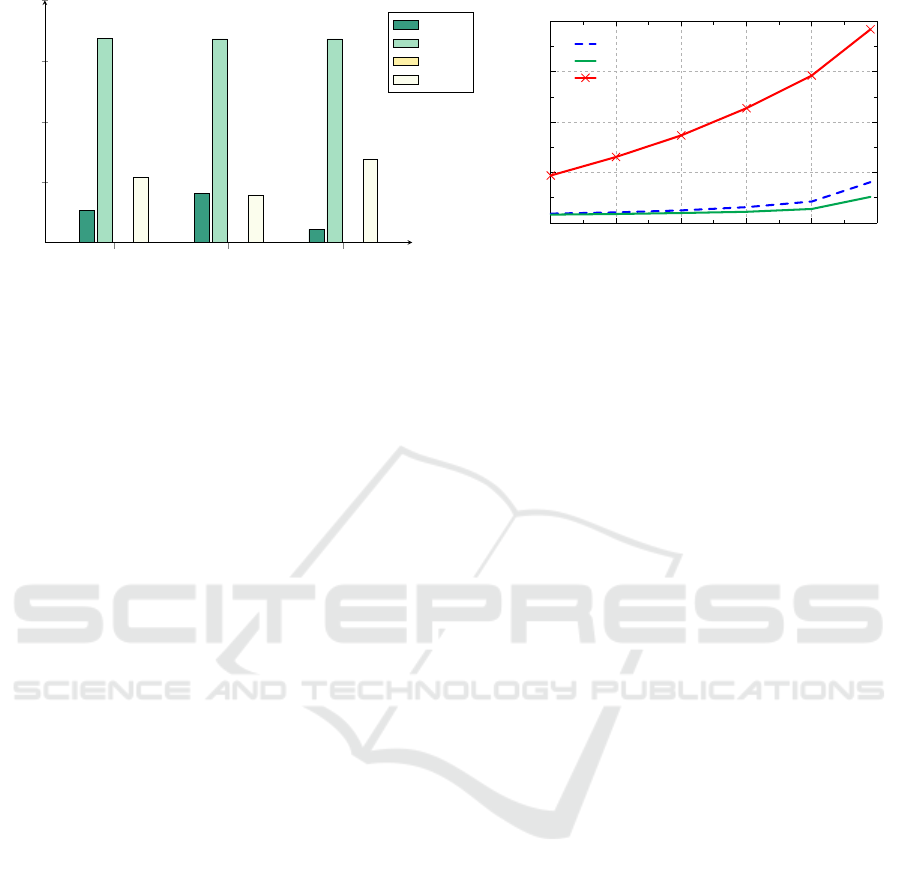
formed over a period of three days. The obtained re-
sults are depicted in Fig. 3(a) that summarizes, for
the three deployment scenarios, the proportions of all
possible detection cases: true presence (TP), true ab-
sence (TA), false presence (FP), and false absence
(FA). We can clearly see that taking into considera-
tion the presence of sensing-holes helps in reducing
the FA, i.e., the system is able to capture more occu-
pant movements. However, these results represent the
distribution of the raw data collected from PIRs and
can not be used as a reliable indication of absence.
As the PIR signal fluctuates significantly when occu-
pants are moving, detection systems generally imple-
ment a filtering mechanism to smooth the collected
raw data. The filter is based on a timeout mechanism
that is launched when no motion is detected, which
delays the decision about absence detection to over-
come FA.
To evaluate the performance of the system in the
different deployment scenarios and under different
timeout values, we have measured two metrics, (i) the
comfort level, and (ii) the waste in energy usage. The
first metric quantifies the ability of the system to pre-
serve the convenience of users, that is, the ability not
to disturb the occupants by keeping office energy sup-
ply on when they are present in the target area (i.e.,
ability to overcome FA). The second one reflects the
proportion of time the system fails to effectively de-
tect (or react to) the absence of occupants, which im-
plies a missed opportunity to reduce the energy con-
sumption.
Formally, the comfort level C and the energy us-
age waste W are computed as follows:
C =
T
P
T
P
+ F
A
, W =
F
P
F
P
+ T
A
,
where T
P
(respectively F
P
) denotes the total du-
rations of TP (respectively FP), and T
A
(respectively
F
A
) denotes the total durations of TA (respectively
FA).
For every deployment scenario, the value of the
absence timeout has been varied, and C , W have been
measured for every case. Fig. 3(b) shows the varia-
tion of the observed usage waste for different levels
of comfort. We observe that the performances of the
hole-unaware deployment are remarkably lower than
our proposed solution, which means that the presence
of holes significantly affects the waste of energy us-
age, specially when requiring a high level of users’
comfort. In fact, to ensure a high level of comfort in
the presence of sensing-holes, absence decisions need
to be delayed for long periods (high timeout). This
is explained by the fact that these zones hamper the
proper capture of small movements, which increases
the time required to catch such rare events. The con-
sequence of high values of the timeout is that occu-
pants leaving the office are not timely detected (re-
ported), which causes energy waste.
We can also notice from Fig. 3(b) that the perfor-
mances of the optimal solution using only one PIR are
SENSORNETS 2016 - 5th International Conference on Sensor Networks
178
Optimal 1 Optimal 3 Hole-unaware
20
40
60
80
10.75%
16.47%
4.6%
67.35%
67.33%
67.33%
0.26%
0.28%
0.28%
21.62%
15.9%
27.77%
True +
True -
False +
False -
(a)
0
2.5
5
7.5
10
50 60 70 80 90 100
Energy usage waste (%)
Comfort level (%)
Optimal 1
Optimal 3
Hole-unaware
(b)
Figure 3: Experimental results for the three scenarios. (a) Time proportion for the different cases of detection based on raw
data. (b) The variation of the energy waste for different levels of users’ comfort using a timeout smoothing.
very close to the optimal full coverage solution using
three PIRs. This is due to the fact the first deploy-
ment covers an important proportion of the chair-side
of the office desk. Consequently, covering the remain-
ing spaces of the desk, as in the second deployment
scenario, does not help capturing more occupants ac-
tivity. This result demonstrates that it is important
to properly construct the Φ matrix in order to focus
the optimization problem on the most relevant spaces
which helps reducing the number of required sensors.
4 CONCLUSIONS
In this paper, we have investigated the impact of
sensing-holes on the performances of typical PIR-
based occupancy detection systems. To our knowl-
edge, our work represents the first study that (i) inves-
tigates how this intrinsic property affects the accuracy
of detection and (ii) proposes a deployment method to
alleviate its negative effects and enable the system to
optimize energy usage. The problem has been formu-
lated with mixed integer linear programming (MILP),
where the positions of a set of PIRs are sought out in a
way to maximize the effectively covered area. Based
on this formulation, several experiments have been
carried out to evaluate the performances of the ob-
tained solutions in comparison with hole-unaware de-
ployment. Results demonstrate clear improvements in
terms of accuracy in detection when using hole-aware
placement, which helps rationalizing energy manage-
ment. For example, in scenarios requiring high levels
of user comfort, a hole-unaware deployment can re-
sult in a 9.61% of waste of energy usage, while hole-
aware placement reduced this wastage to 1.3%.
The preliminary study presented in this paper is
the first step in our ongoing project. The next one is
to use these results in the design of a wireless sensor
network for efficient energy control in smart build-
ings. We think such an optimal deployment will help
to make the whole system effective, and to rational-
ize the settings of actuation parameters in a way that
balances user’s comfort and energy saving.
REFERENCES
Agarwal, Y., Balaji, B., Gupta, R., Lyles, J., Wei, M., and
Weng, T. (2010). Occupancy-driven energy manage-
ment for smart building automation. In Proc. the 2nd
ACM Workshop on Embedded Sensing Systems for
Energy-Efficiency in Building, BuildSys’10, pages 1–
6.
Beltran, A., Erickson, V. L., and Cerpa, A. E. (2013).
Thermosense: Occupancy thermal based sensing for
hvac control. In Proc. of the 5th ACM Workshop
on Embedded Systems For Energy-Efficient Buildings,
BuildSys’13, pages 11:1–11:8.
California Energy Commision (1993). Advanced Lighting
Guidelines.
Delaney, D. T., O’Hare, G. M. P., and Ruzzelli, A. G.
(2009). Evaluation of energy-efficiency in lighting
systems using sensor networks. In Proc. of the 1st
ACM Workshop on Embedded Sensing Systems for
Energy-Efficiency in Buildings, BuildSys’09, pages
61–66.
Kazmi, A. H., O’grady, M. J., Delaney, D. T., Ruzzelli,
A. G., and O’hare, G. M. P. (2014). A review
of wireless-sensor-network-enabled building energy
management systems. ACM Trans. Sen. Netw.,
10(4):66:1–66:43.
Lu, J., Sookoor, T., Srinivasan, V., Gao, G., Holben, B.,
Stankovic, J., Field, E., and Whitehouse, K. (2010).
The smart thermostat: Using occupancy sensors to
save energy in homes. In Proc. of the 8th ACM Confer-
ence on Embedded Networked Sensor Systems, Sen-
Sys’10, pages 211–224.
On the Effect of Sensing-holes in PIR-based Occupancy Detection Systems
179

Marchiori, A. and Han, Q. (2010). Distributed wireless con-
trol for building energy management. In Proc. of the
2nd ACM Workshop on Embedded Sensing Systems
for Energy-Efficiency in Building, BuildSys’10, pages
37–42.
Nguyen, T. A. and Aiello, M. (2013). Energy intelligent
buildings based on user activity: A survey. Energy
and Buildings, 56:244 – 257.
Panasonic (2012). Motion sensors datasheet.
http://www3.panasonic.biz/ac/e download/control/
sensor/human/catalog/bltn eng pir.pdf.
SENSORNETS 2016 - 5th International Conference on Sensor Networks
180
