
Multi-agent Approach for Return Route Support System Simulation
Shouhei Taga
1
, Tomofumi Matsuzawa
2
, Munehiro Takimoto
2
and Yasushi Kambayashi
1
1
Department of Computer & Information Engineering, Nippon Institute of Technology,
Saitama, Japan. 4-1 Gakuendai, Miyashiro-machi, Minamisaitama-gun, 345-8501, Japan
2
Department of Information Sciences, Tokyo University of Science, 2641 Yamazaki, Noda 278-8510, Japan
Keywords: Multi Agent, Mobile Agent, Ant Colony Optimization, Mobile Ad Hoc Network, Contingency Plan, Risk
Management.
Abstract: We propose a system that supports stranded commuters caused by a large-scale disaster. When a large-scale
disaster breaks out, buildings may collapse and roads may be damaged and the public transportation systems
would be paralyzed. Thus, people working in the city center have to walk back home on foot. The problem is
that when those people start walking, the situation along the routes for returning home may be different from
that of the pre-disaster. Not only may it be the first time for most of them to walk home, but also the return
route may be extremely complex due to many detours. They have to look for alternative routes whenever
bridges collapse and fires break out. Making situation become worse, modern people intensively use
navigation systems, those systems may be unavailable due to the paralyzed Internet. A large scale disaster
may destroy base stations of wireless phones, and even if it does not completely destroy them, extreme
congestion may paralyze the communication infrastructure so that not only net-surfing using smartphone, but
also collecting information by e-mail may become impossible. To deal with such situations, we are designing
a system that provides those unfortunate pedestrians appropriate return routes to their homes without
depending on the communication infrastructures. Instead, our proposed system only depends on smartphones
of those pedestrians and constructs mobile ad hoc networks (MANET) to collect and disperse useful
information. We employ multiple mobile agents extensively for information collection and dispersion. In
order to demonstrate the feasibility of our system, we have constructed a preliminary prototype of the
simulation system and have conducted numerical experiments.
1 INTRODUCTION
When the Great East Japan Earthquake occurred in
2011, we observed many cracks and liquefaction
phenomena on the ground as well as communication
infrastructure broke down even far from the directly
affected areas, i.e. Tokyo. Tokyo is more than 300km
south of Sendai, a major city close to the seismic
centre, even though the centre of the shock was the
sea bed. Those phenomena made public
transportations paralyzed. On top of the unfortunate
events, the communication network became
unreliable due to the collapse of base stations and
congestion of communication networks. The situation
made people who started walking home be unable to
collect information such as the state of the return
routes using the Internet. A large number of stranded
commuters had to return home without any
information. In a modern society, too many people
rely on the communication network environment and
depend on information gathering from the Internet. It
is not difficult to imagine that how hard and
dangerous for those modern people who heavily
depend on the Internet, e.g. the navigation systems, to
suddenly start walking without any Internet
assistances. They may have to face possible
secondary disasters.
Actually, there are several services that provide
return routes for people walking back home. For
example, Mapple ON provides an application for
returning home support map when a disaster occurs
(Mapple ON Co., Ltd., 2013). This application guides
the user to support facilities such as first aid stations
as well as provides return route to homes by using
GPS information. This application utilizes the
information such as road networks. This system,
however, uses the information before a disaster
occurs. Therefore when the disaster makes some
roads impassable, the recommended routes by using
Taga, S., Matsuzawa, T., Takimoto, M. and Kambayashi, Y.
Multi-agent Approach for Return Route Support System Simulation.
DOI: 10.5220/0005819602690274
In Proceedings of the 8th International Conference on Agents and Artificial Intelligence (ICAART 2016) - Volume 1, pages 269-274
ISBN: 978-989-758-172-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
269

the map information become useless. We need a
guiding system that uses the real-time information
without Internet support.
In this paper, we propose a return route support
system that uses real-time information collected by
not using the Internet. That is a system temporarily
constructs a MANET environment that connects the
smartphones for communication means and makes
them share useful information for returning home.
The system collects as well as shares the latest
information in the MANET using mobile agents for
sharing it. By using the collected information, the
system derives a certain return route for each person.
Henceforth, we call this disaster return home route
support system simply "the system", and the stranded
commuters to take advantage of this system "the
users".
When the user finds an impassable point of a road,
he or she is expected to dispatch a mobile agent to
spread the information to share it with other users. In
order to collect information for the return route, the
user dispatches another mobile agent to smartphones
in the destination direction to look for useful
information. Thus, the user can obtain the optimal
return route in light of the current road conditions.
It is essential to use map information for deriving
the return route. In the post disaster environment,
however, it is difficult to acquire the map information
from the Internet services. In this system, the user is
expected to register the map data that covers the home
and office before the disaster occurs. This way, the
system can deal with the map information in a disaster.
The structure of the balance of this paper is as
follows. The second section describes the background
and discusses the related works. The third section
describes the multi-agent system that is the basis of
our proposed system. In order to demonstrate the
feasibility of our system, we have constructed a
prototype of the simulator for this system and have
conducted numerical experiments. We report the
results and discuss the future works in the fourth and
fifth sections. Finally we conclude our discussion in
the sixth section.
2 BACKGROUND
As we start our study, there are two major studies
closely related to our system. One is the return route
generation methods proposed by (Abeta et al., 2007).
In order to assist people who return home in a disaster,
their system collects the trajectories of stranded
commuters using an ad hoc network, and proposes
return routes using the trajectories. The users can then
obtain the recommended moving directions through
their mobile phones from the terminals associated to
nearby intersections. By numerical experiments, they
have showed that they have succeeded to derive good
return routes.
The other one is Alejandro Aviles’s ERAM
(Evacuation Routing using Ant Colony Optimization
over Mobile Ad hoc Networks) (Alejandro et al.,
2013). In his study, in order to derive the evacuation
routes, he employs a multi-agent system and the ACO
(Ant Colony Optimization) in an assumed MANET
environment. In his simulation system, when an
evacuee successfully exits the building (the system
assumes to be used indoor), a mobile agent called
goal agent (GA) is generated from the smartphone the
evacuee has. The generated GA moves to the other
smartphone and records the number of movements.
The number of movements acts as the pheromone in
the ACO. The fewer the movements, the better
trajectory the system evaluates and route seeking
agents are probabilistically attracted. Routing Agent
(RA) is the route seeking mobile agent that is also
generated from the evacuee’s smartphone. RA moves
to the other smartphones and records the number of
movements of the GA. Then the RA recommends the
optimal evacuation route as the trajectory of the GA
that has the least number of movements.
Asakura et al. have investigated the way
information is exchanged between evacuees in a
disaster. They have constructed a map information
sharing system (Asakura et al., 2011). In their system,
some evacuees record road information while moving
to shelters, and then exchange the information they
have collected using a MANET. Since the situation
can change from time to time in a disaster area, they
have proposed an ACO-based extension to allow
evacuees to respond to such changes (Asakura et al.,
2013).
In our proposed system, we have also introduced
MANETs and multi-agent system. A MANET is a
communication network formed by only mobile
terminals. The difference between existing
communication systems and MANETs is that
MANETs do not require the base stations. When a
large-scale disaster occurs, it may become difficult to
conduct communication using the base stations. In
addition, communication failure may also occur due
to congestion. Therefore, MANET is suitable for
constructing a temporary communication means
without using the base stations. We have taken
advantages of Wi-Fi for constructing communication
links between smartphones. One of the disadvantages
of MANETs is the fact that links are disconnected
frequently because smartphones that constitute the
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
270
network are literary moving. We can mitigate this
problem by using mobile agents. Mobile agents are
software agents that move between devices. Mobile
agents provide a means of communication where
connections are intermittent, because connections are
only needed when they move. Thus, it is not
necessary to keep connections during the entire
communication processes.
In addition, we have employed the concept of the
pheromone in the ant colony optimization (ACO)
(Dorigo et al., 1996). ACO is an algorithm that
mimics the foraging behaviour of ants. When ants
move back and forth between food and nest, they
deposit a chemical substance called pheromone.
Pheromone evaporates over time. The ants following
the pheromone trace to reach the food also deposit
pheromone. As a result, the route that connects from
the nest to the food in the shortest path receives more
pheromone before its evaporation than other longer
routes, and thus the most convenient route is
established.
Even though we have proposed the base algorithm
of this system in the previous paper (Yatsuyanagi et
al., 2014), the simulator based on the algorithm was
too crude, and the study failed to produce reasonable
return routes. In this proposed system, we succeeded
to derive a reasonable path by using Dijkstra’s
algorithm (Dijkstra, 1959) in which the intersections
are treated as the nodes.
3 AGENT SYSTEM
In this system, we adopt an agent system comprising
multiple mobile software agents. In the agent system,
there are two types of agents. One is mobile agents
that move among the users’ smartphones: they are the
routing agent (RA) and the information diffusion
agent (IDA). The other is static agents that remain on
the users’ smartphones: they are the information
agent (IA) and the node management agent (NA).
The roles of the mobile agents are collecting
information while moving among the smartphones in
the MANET as well as diffusing the newly
discovered information such as impassable points and
first aid stations. The roles of static agents are storing
and organizing information that is conveyed by the
mobile agents, and deriving the routes to the
destinations based on the collected information, as
well as providing user interface for receiving input
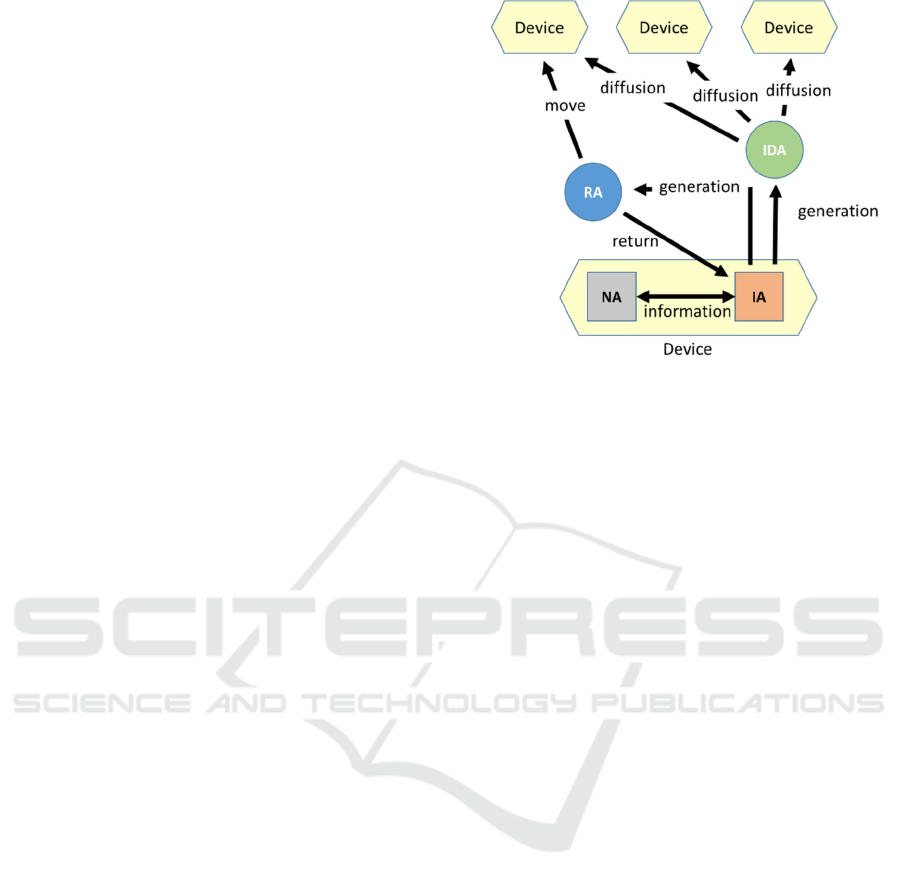
from the users. Figure 1 shows the relations between
these agents. We describe each agent in detail in the
following subsections.
Figure 1: Information agent (IA) generates and dispatches
RA and IDA for collecting and diffusing route information.
3.1 Information Agent (IA)
The roles of IA are providing the user interface,
generating mobile agents, and deriving the return
routes.
First, we describe the user interface. IA displays
the derived route on the map with useful information
such as impassable points and first aid stations. When
the user finds an impassable point or a first aid station,
he or she presses the corresponding diffusion button
on the screen so that IA creates an IDA to diffuse the
newly discovered information. IA updates the
information on the map as RA returns and gives IA
new information.
Second, we describe the generation of mobile
agents. IA periodically generates RAs for collecting
information. When the IA generates an RA, it
requests NA and receives the destination location and
the ID of the smartphone of the user. After passing
the information to the RA, the IA dispatches the RA
toward a smartphone in the direction of the user’s
destination. The RA then moves from a smartphone
to another smartphone, and comes back with
collected information. When RA comes back, IA
receives the information from the RA and passes it to
NA. Then it generates another RA after a certain time
elapses. If RA has not come back after a certain time
period, IA regards the RA as lost, and generates a new
RA. When RA generated by another smartphone
arrives, IA requests NA, receives information and
passes it to the RA with its own ID. IA controls all the
information transfers.
When the user presses the diffusion button, IA
generates an IDA. When IA generates an IDA, it
passes type information and location information to
Multi-agent Approach for Return Route Support System Simulation
271
indicate what and where the user finds along with the
ID of the smartphone to the IDA, and dispatches it to
one of the smartphones nearby. Then, the IDA is
gradually diffusing into the set of other smartphones.
When an IDA generated by another smartphone
arrives, IA receives the information and passes it to
NA, and gives its ID to the IDA.
Third, we describe the route derivation. IA derives
the route to the destination by using the collected
information. While the default destination is set to the
home, the system switches the destination to the rest
area after certain time has elapsed since system
startup, in order to give the user a break. The user can
choose whether the switching occurs and duration
time for switching. IA derives the return route by
Dijkstra algorithm, and then displays it in the map on
the interface screen. If IA receives information of an
impassable point on the current route, it re-derives a
new route that avoids that point. IA also re-derives the
route when destination is altered.
3.2 Node Management Agent (NA)
NA keeps the collected information and passes the
information to IA on request. The stored information
includes GPS information representing the current
location, the current destination, the impassable
locations, the first aid stations and the location of the
rest areas along with the time they are stored and the
IDs of the IDAs that convey the information. When
redundant information is delivered, NA deletes the
old information by referring to the time information.
Also, after a certain time period from the store, the
old information is deleted.
3.3 Routing Agent (RA)
RA is the harbinger of the user. It conducts
reconnaissance of the direction toward the destination
and collects the information.
RA is generated by IA. Then RA moves to one of
the smartphones that is in the user's moving direction.
Upon arrival at such a smartphone, RA requests the
IA on the smartphone to provide information that it
has. Upon receiving the information, RA moves again
to another smartphone. After repeating this moving
operation some predetermined number of times, it
tries to return to the original smartphone. Since each
RA has the history record of the visited smartphones
as a sequence of IDs, RA can move back to its origin
by tracing the recorded smartphones. If a link of the
smartphones is lost, it waits to between for the link to
recover for a while. After waiting for a predetermined
period, and if the link is not recovered, the waiting
RA self-destructs. When RA succeeds to return to the
original smartphone, it passes the collected
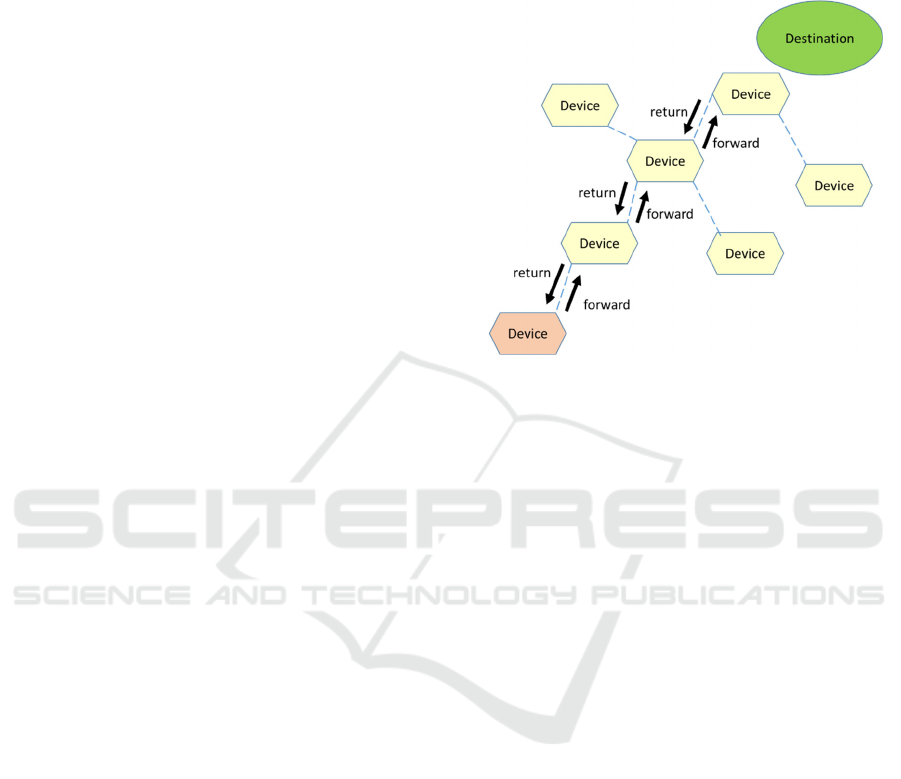
information, and disappears. Figure 2 shows how an
RA moves.
Figure 2: RA’s movements.
3.4 Information Diffusion Agent (IDA)
IDA diffuses useful information such as impassable
points on roads and bridges, resting places and the
first aid stations the user finds. IDAs collectively
implement the information sharing among the users.
When the user presses one of the diffusion buttons
on the interface screen, IA produces an IDA. The IDA
has the information about what the user finds the
location and the time. Then, the IDA clones itself to
number of smartphones that are linked to the
originating smartphone. One copy moves each of the
neighbour smartphones. IDA has a unique ID and all
the IDs of the duplicated IDAs are the same. Upon
arrival, IDA passes its information and its ID to the
IA of the smartphone it arrived to and it clones itself
again to all connected smartphones. If its ID is
already stored, the IDA self-destructs without doing
anything. By doing so, IDA prevents dispersing
redundant information. Also, each IDA disappears
after a certain number of movements.
IDAs collectively implement the pheromone in
ACO. IDA determines the value of its information
according to the distance between the discovery point
and the current position, the number of movements it
performed, the elapsed time from it was generated. In
other words, IDA reduces the value of its information
as the number of movements, the elapsed time, the
distance between the discovery point and current
position increases. When the information value gets
to be below a certain threshold, the IDA gets to be
useless and self-destructs.
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
272

4 PRELIMINARY EVALUATION
To demonstrate the feasibility of our proposed multi-
agent system, we have constructed a simulator and
have conducted preliminary experiments on this
simulator.
The scenario of the simulator is as follows; after a
disaster occurs, the users move through a city, in
which a few impassable points exist, to the
destination using this system. Figure 3 shows a screen
shot of the simulator that displays the users (red dots),
an impassable point (purple area), a safety zone
(green region), and the links between the smartphones
(connecting lines between the users).
Figure 3: Simulator screen.
The number of users can be specified. Each user’s
smartphone has certain residual quantity of the
battery power remaining that is randomly set. When
the battery is dead, the user has to stop moving. Each
smartphone has certain communication range, and
when a user with a smartphone comes into
communication range, a link is automatically
established. When a user finds an impassable point
(comes within a certain view range), he or she
diffuses that information with GPS coordinates to
other users by dispatching IDAs. The users, who
receive that information by an IDA, as well as the
discoverer, try to find alternative routes to detour the
impassable point.
We have set two cases. In one case, all the
evacuees have smartphones equipped the system, and
in the other case, no one uses the system. We have
performed the simulation experiments ten times each
and compared the averaged consuming rounds for all
the users’ arrivals to the destinations. One round
means the duration time all the users execute one step.
In the experiments, we set the number of users 300,
the field size 800 × 625 pixels, and 2 pixels per round
as the amount of movement of a user.
Table 1 shows the results of the experiments.
Since the users who use the system are aware of the
impassable points on the route in advance, those who
use the system can arrive earlier to their destination
than those who do not use the system, as expected.
Table 1: Result.
Num. of rounds
Evacuation with the system 583
Evacuation without the system 683
5 DISCUSSIONS
Even the preliminary experiment shows the system is
feasible and effective; we have to investigate quite a
few problems in order to make the simulation system
be realistic.
A smartphone has limited resources. In the present
design, if the users observe many impassable points,
they dispatch many IDAs. Thus each smartphone in
the system may be overloaded. We have to consider
how to save the battery consumption due to the heavy
computational load of each smartphone. In order to
mitigate this problem, we can restrict the inflow of
IDAs. In order to set the threshold to restrict the
inflow, IA should sense the environment and set the
most appropriate value. However, that method may
have IA overloaded by heavy computations.
Therefore, it may be better to set a threshold in
advance. It is difficult to evaluate the appropriate
values for various environments. It is the next step we
have to take by implementing much more refined
simulation of how the respective methods affect the
system’s performance.
In the present system, RA is designed to go back
to the smartphone where it was created by tracing
back its movement history record. Therefore, if RA
cannot find one of the smartphones in the record, it
cannot return to the origin. There are many factors
that cause the trace of the smartphone to be lost: the
user of the smartphone may go somewhere, the user
may terminate using the system, and the battery of the
smartphone may be dead. In the simulator, the user
does not terminate the system until either he or she
succeeds in reaching the safe area, or the battery of
the smartphone dead. However, in reality, when the
battery capacity is running low, the user usually
switches off the smartphone to save the battery.
Therefore the possibility the RA loses the trace may
be higher in reality than in the simulator.
Multi-agent Approach for Return Route Support System Simulation
273

In order to solve this problem, we are planning to
provide alternative return routes for the RA that are
different from the ones in the movement record. For
example, when a RA arrives at the destination
smartphone, then the RA acquires information of
other smartphones connected to that smartphone. If
the RA cannot find the next smartphone in the
movement record, it moves to another smartphone
that is connected to the smartphone that may be
connected to the scheduled destination. By doing so,
we can increase the possibility of each RA to reach to
the original smartphone even if a RA cannot find the
smartphone in the movement record. However, this
technique imposes more burdens on RAs and may
causes performance degradation in the system.
In a wider context, Stranders et al. proposes
decentralized coordination algorithms for multiple
sensors (Stranders et al., 2009), and Zambonelli’s
SAPERE project is pursuing a pervasive services in
context-aware systems (Anzengruber et al., 2013;
Montagna et al., 2013). Their approaches are similar
to our proposal approach even though none of them
considers using MANET and mobile agents. We plan
to re-design our system after collecting data from the
simulation, and we will then integrate the concepts of
such competitive systems.
6 CONCLUSIONS
In this paper, we propose a return route support
system for stranded commuters going back home.
The system consists of smartphones connected
through MANETs. The users of smartphones can
exchange and share useful information by using
multiple mobile agents. In order to examine the
feasibility, we have constructed a prototype of the
simulator and have conducted a preliminary
experiment. As we have expected, the users who use
the system can arrive to the safe area more quickly
than the users who do not use the system. As a future
direction, we are refining the simulator to investigate
the problems discussed in the fifth section. For this
purpose, it is necessary to increase the capabilities of
the simulator. In particular, we are implementing a
new simulator where the system perceives the traffic
of people and adjust its behavior dynamically.
ACKNOWLEDGEMENTS
This work is supported in part by Japan Society for
Promotion of Science (JSPS), with the basic research
program (C) (No. 25330089 and 26350456), Grant-
in-Aid for Scientific Research.
REFERENCES
Abeta, T., Suzuki, Y., Kawagoe, K., 2007. Route generation
methods for supporting return route in disaster.
DEWS2007, DEWS2007 D7-3, pp.1-8.
Anzengruber, B., Castelli, G., Rosi, A., Ferscha, A.,
Zambonelli, F., 2013. Social feedback in display
ecosystems, IEEE International Conference on Systems,
Man, and Cybernetics, pp.2893-2898.
Asakura, K. Chiba, T. Watanabe, T., 2011. A map
information sharing system among refugees in disaster
areas, on the basis of ad-hoc networks, The 3
rd
International Conference on Intelligent Decision
Technologies, pp.367-376.
Asakura, K. Chiba, T. Watanabe, T., 2013. Construction of
navigational maps for evacuees in disaster areas based
on ant colony systems, International Journal of
Knowledge and Web Intelligence. Vol. 4, Issue 4,
pp.300-313.
Aviles, A. M., Takimoto, M., Kambayashi, Y., 2014.
Distributed evacuation route planning using mobile
agents. Transaction on Computational Collective
Intelligence XVII, LNCS 8790, pp.128-144.
Dijkstra, E. W. 1959. A note on two problems in connexion
with graphs. Numerische Mathematik, 1, S. pp.269-271.
Dorigo, M., Maniezzo, V., Colorni, A., 1996. Ant system:
Optimization by a colony of cooperating agents, IEEE
Transaction on System, Vol. 26, No. 1, pp.29-41.
Mapple ON Co., Ltd., 2013. Disaster return home support
map. http://mapple-on.jp/productskitaku2013-14/.
Montagna, S., Viroli, M., Fernandez-Marques, J. L., Di
Marzo, G., Zambonelli, F., 2013. Injecting self-
organization into pervasive service ecosystems. Mobile
Networks and Applications, vol. 18, no. 3, pp.398-412.
Stranders, R., Farinelli, A., Rogers, A., Jennings, N., 2009.
Decentralised coordination of mobile sensors using the
max-sum algorithm. 21st International Joint
Conference on Artificial Intelligence, pp.299-304.
Yatsuyanagi, N., Takimoto, M., Kambayashi, Y., 2014.
Design of a return route support system using multiple
mobile agents. SICE Annual Conference, pp.1571-1576.
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
274
