
Optimum Vehicle Flows in a Fully Automated Vehicle Network
Joerg Schweizer
1
, Tiziano Parriani
2
, Emiliano Traversi
3
and Federico Rupi
1
1
Dept. of Civil, Environmental, Chemical and Materials Engineering (DICAM), University of Bologna, Bologna, Italy
2
Optit, Bologna, Italy
3
Dept. of Computer Science (LIPN), University of Paris 13, Paris, France
Keywords:
Self-driving Cars, Automated Vehicles, PRT Personal Rapid Transit, Unoccupied Vehicle Routing, Traffic
Assignment, System Optimum, User Equilibrium.
Abstract:
This paper provides a novel assignment method and a solution algorithm that allows to determine the optimum
vehicle flows in a fully automated vehicle network. This assignment method incorporates the following specific
features: (1) optimal redistribution of occupied and unoccupied vehicles; (2) inter-vehicle spacing is adapted to
meet the minimum safe distance criteria on congested link, (no collision in the worst failure case); (3) trip-time
minimization of all traffic participants by a centralized vehicle routing. The latter feature allows the realization
of a so called system optimum solution, which minimizes the total time of all trips. This assignment method is
applied to two, topologically different, test networks at different travel demand levels, in order to determine:
the share of unoccupied vehicle, the minimum number of required vehicles, the share of congested links, the
lost trip-time of occupied vehicles due to the presents of unoccupied vehicles. Furthermore, the advantage of a
centralized vehicle routing is quantified by comparing the total trip-times of a scenario using a system optimum
solution with a scenario applying the user equilibrium solution, without considering unoccupied vehicle flows.
Regarding the investigated scenarios, the share of unoccupied vehicle flows with centralized vehicle routing
in a uniform, random demand scenario is approximately 11% −14%.
1 INTRODUCTION
1.1 Motivation
According to the U.S. National Highway Traffic
Safety Administration (NHTSA), a level 4 vehicle is
designed to perform all safety-critical driving func-
tions and monitor roadway conditions for an entire
trip, including unoccupied vehicle movements. How-
ever, it is yet uncertain when level 4 vehicles will
become available to the public and which share they
may achieve in the automobile market.
In recent years, also the automation of public
transport has made a significant breakthrough as the
first Personal Rapid Transit (PRT) systems are suc-
cessfully operating in Masdar, Abu Dhabi, UEA, at
terminal 5, Heathrow airport, London, UK and Sun-
cheon Bay, South Korea. PRT has similar service
characteristics than level 4 automated vehicles, except
that PRT vehicles run on dedicated guideways, which
are usually elevated or underground. The operation of
PRT resembles a taxi-service with taxi-stands and an
automated taxi driver.
The traffic flows analysis made in this article ad-
dresses both transport technologies. For this reason
we use the term automated vehicles for automated
road vehicles as well as PRT vehicles.
With respect to the current road network used by
human drivers, networks with fully automated vehi-
cles are expected to enable major changes in terms of
traffic circulation, and urban land-use: (i) Reduction
of trip times; the vehicle routing would no longer be
the choice of individual vehicles, but imposed by traf-
fic managements, either decentralized or centralized;
(ii) reduction of parking space; the option to run
also unoccupied vehicles, would allow shared vehicle
schemes; The net effect of such a scheme would be a
reduced need for urban parking space.
However, huge research efforts and/or investments
are required in the forthcoming years before large
scale automated vehicle networks can be realized. For
this reason, it is of paramount importance to assess the
potential benefits of such networks for local as well
as for strategic planning. The method developed and
demonstrated in this paper does exactly address these
issues: the traffic assignment method allows to deter-
Schweizer, J., Parriani, T., Traversi, E. and Rupi, F.
Optimum Vehicle Flows in a Fully Automated Vehicle Network.
In Proceedings of the International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2016), pages 195-202
ISBN: 978-989-758-185-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
195

mine the optimal flow distribution in automated vehi-
cle networks, while minimizing the total travel time.
With this information also the best case environmen-
tal impacts can be estimated.
1.2 Traffic Assignment Methods and
Automated Vehicles
In transport planning, the traffic assignment problem
for congested networks has been extensively studied
since Wardrop’s two optimality principles, user equi-
librium (UE) and system optimal (SO), were first pub-
lished (Wardrop J.G. (1952)). The limited road ca-
pacity has been modeled by incorporating link ca-
pacity constraints. But it became more common to
implement capacity limits through flow deviation, us-
ing flow-dependent link cost functions, see (Nie et al.
(2004)) for a comprehensive comparison. The first
solution algorithm proposed by Frank-Wolfe (Frank
H. and Wolfe P. (1956)) is still widely used by trans-
port practitioners despite its drawbacks (Patriksson
M. (1994)). A comparison of known solution algo-
rithms for the general convex multi commodity flow
problems can be found in (Ouorou A. et al. (2000)).
The user equilibrium (UE) assignment has re-
ceived most attention, as it reflects the traffic flows
in an equilibrium where all road users have mini-
mized their own travel times, or generalized travel
costs, for a comprehensive overview, see (Patriksson
M. (1994)). The system optimum (SO) traffic assign-
ment minimizes the sum of trip times over all users.
The SO assignment is particularly interesting for au-
tomated vehicle networks, because such a global op-
timization could be performed by a centralized traf-
fic management system, controlling the routes of all
vehicles. However in literature, flows of unoccupied
vehicles have not been considered.
Unoccupied vehicle routing received more atten-
tion with the emerging PRT technology. The main
approach have been heuristically optimized micro-
simulators (Andr
´
easson I. (1994); Koskinen K. et
al. (2010)). Lees and Miller formulated as first a
benchmark for optimum routing with a uniform de-
mand (Lees-Miller J.D. et al. (2010)). A static traf-
fic assignment method has been proposed (Schweizer
J. et al. (2012)) which includes unoccupied vehicle
flows: a linear programming model has been applied
to a simple, uncongested network. Furthermore, a bi-
linear model for congested links has been formulated.
On congested networks, the vehicle flow on a link
depends on link travel times, the link travel times for
vehicle networks depend on the headway (which are
in turn a function of the link flow). In automatic ve-
hicle control literature, different vehicle spacing poli-
cies can be implemented. The most relevant policies
are: the constant time headway policy and constant
safety policy. The bulk of research deals with con-
stant time headway spacing policy, which is usually
adopted by Automated Highway Systems (AHSs) in
order to form platoons of closely spaced vehicles, see
for example (Horowitz R. and Varaiya P. (2000)). The
constant safety policy maximizes vehicle flows at a
given speed, while guaranteeing collision-free opera-
tion. However, the control system for constant safe
headways are inherently non-linear and more difficult
to analyze and design. Nevertheless, constant safety
considerations have played a role in the design of con-
trol laws for platoon-join manœvers with AHS (Li et
al. (1997)). A non-linear feedback controller which
keeps vehicles at a minimum safe distance has been
proposed in (Schweizer J. (2004)).
The present work focuses on: (i) the development
of a Frank-Wolfe based solution algorithm (Frank H.
and Wolfe P. (1956)) for the assignment model of
congested, automated vehicle networks, as proposed
in (Schweizer J. et al. (2012)); this assignment model
assumes a constant safety policy and rerouting of oc-
cupied and unoccupied vehicles using either a decen-
tralized or a centralized traffic management, repre-
sented by a UE assignment or a SO assignment, re-
spectively. (ii) the application of the developed as-
signment method to two different real cities (with dif-
ferent, simplified demand scenarios), in order to show
the theoretical potential of fully automated vehicle
networks in terms of trip-times and vehicle require-
ments.
1.3 Paper Organization
The remainder of the paper is organized as follows:
The next section describes the traffic assignment
model and the proposed solution algorithm. In Sec. 3
the traffic assignment is applied to two different net-
works. Finally, in Sec. 4 some conclusions of this
work and its impacts are drawn.
2 ASSESSMENT
METHODOLOGY
This section focuses on the description of the traffic
assignment method which will be used in successive
traffic analysis. First the assignment problem is de-
fined, which consists of the link cost function and
the optimization model. Thereafter, the solution algo-
rithm which solves the assignment problem is briefly
explain. Finally the investigated traffic scenarios and
performance indicators are introduced.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
196

2.1 Assignment Problem
The link cost function c
a
( f
a
) of link a is modeled as a
non-linear function of link flow f
a
and represents the
effective link travel time of the vehicles running at a
constant speed v. For uncongested links, this speed
equals free-flow speed while for the congested links,
the speed is determined by the minimum safe dis-
tance criteria. The considered link parameters are link
length `
a
and free flow speed (or maximum speed) V
a
.
All automated vehicles on the network are parameter-
ized by their brake actuation time τ, minimum guar-
anteed emergency brake deceleration a
E
and vehicle
length L. Consequently, the minimum safe nose-to-
nose time-headway T (v) at a constant speed v is given
by:
T (v) = τ +
v
2a
E
+
L
v
. (1)
This condition is often referred to as the “brick
wall stopping criteria” and guarantees collision-free
operation even in case a vehicle stops instantly, pre-
forming an infinite deceleration. For road vehicles
this may be too restrictive, as it limits capacity. But
the theory can be easily extended to the case where
the vehicles are allowed a finite worst case decelera-
tion. It is straight forward to show that T (v) is min-
imal at the critical speed v = v
crit
=
√
2a
E
L and the
link capacity q is solely determined by the vehicle pa-
rameters:
q =
1
T (v
crit
)
.
The assumption made for the determination of the
flow dependent link costs c
a
( f
a
) is the following: the
link flow f
a
imposes the vehicle’s time headway
1
f
a
. If
this headway is above the minimum safe time head-
way T (V
a
), then all vehicles run at free-flow speed
v = V
a
, otherwise the vehicle’s speed v must be re-
duced such that the minimum safe headway is main-
tained. We further assume that the vehicle speed on
the link is always between critical speed and maxi-
mum speed (v
crit
< v < V
a
). This means that the net-
work can have congestions, but no still-stands (traffic
jam). In this case, one can find the following unique
positive solution for the positive link flow-dependent
vehicle speed
v( f
a
) =
q
−2a
E
f
2
a
L + a
2
E
f
2
a
τ
2
−2a
2
E
f
a
τ + a
2
E
f
a
+
−a
E
f
a
τ + a
E
f
a
. (2)
As the link travel time equals
`
a
v( f
a
)
, the link cost func-
tion c
a
( f
a
) results in the non-linear function
c
a
( f
a
) =
`
a
V
a
for f
a
≤
1
T (V
a
)
(uncongested)
`
a
v( f
a
)
for f
a
>
1
T (V
a
)
(congested)
.
(3)
with minimum safe headway T (·) from Eq. 1 and v(·)
from Eq. 2.
The link cost function c
a
( f
a
) is separable and
piecewise continuous. But in order to apply the Frank
Wolfe based solution algorithm, solving Wardrop’s
UE and SO principles, the link cost functions need to
be continuous and monotonically increasing (Patriks-
son M. (1994); Cascetta E. (2001)).
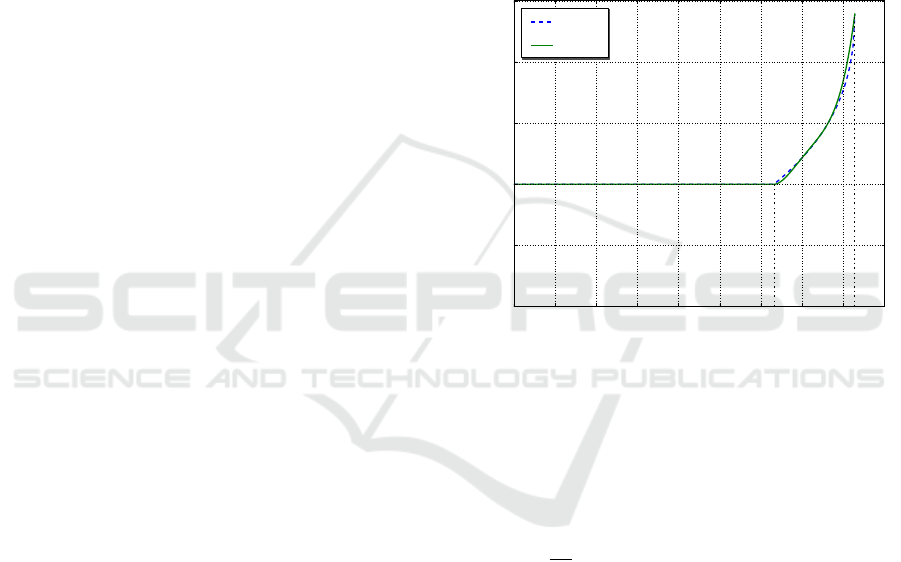
For this reason, an approximated cost function
ˆc
a
( f
a
) is defined by introducing a small slope for the
free-flow case and by interpolating with a fourth order
polynomial for the congested case:
ˆc
a
( f
a
) =
`
a
V
a
−µ(
1
T (V
a
)
− f
a
) for f
a
≤
1
T (V
a
)
P( f
a
) for f
a
>
1
T (V
a
)
(4)
where µ > 0 is a small slope and P( f
a
) =
∑
4
i=0
α
i
f
a
−
1
T (V
a
)
i
. The coefficients α
i
, i = 0 . ..4
of polynomial P( f
a
) are determined such that func-
tion ˆc
a
( f
a
) is continuous in
1
T (V
a
)
, monotonically in-
creasing and a good fit for the exact function c
a
( f
a
).
An example of the approximated and exact cost func-
tion is shown in Fig. 1.
The particularity of the traffic assignment model
for shared, automated vehicles is the incorporation of
a demand for unoccupied vehicle trips. The occupied
vehicle demand is defined by an origin-to-destination
demand matrix, while the unoccupied vehicle trips
are generated by an additional vehicle demand that
just compensates the occupied vehicle demand, as
proposed in (Schweizer J. et al. (2012)), The flow-
equilibrium is ensured by adding a multi-origin/multi-
destination unoccupied vehicle flow to the model.
The transport problem is defined as follows: Let
G = (V ,A) be the directed network graph where V
and A are the sets of network nodes and links, respec-
tively. Each link a = (i, j) ∈A is associated with total
link flow f
a
(unoccupied plus occupied vehicle) and
the travel cost function ˆc
a
( f
a
) from Eq. 5.
Following Wardrop’s second principle, a SO traf-
fic assignment minimizes the objective function
z
SO
(f) =
∑
a∈A
ˆc
a
( f
a
) f
a
(5)
where f is the link flow vector f = [ f
0
,. ..]
0
. In the SO
case, z
SO
(f) is the total travel time of all trips, includ-
ing unoccupied vehicle movements. The solution of
Optimum Vehicle Flows in a Fully Automated Vehicle Network
197

the SO assignment will be compared against the solu-
tion of the UE, using the integral objective function
z
UE
(f) =
∑
a∈A
Z
f
a
0
ˆc
a
( f )d f . (6)
Note that the integral objective function z
UE
(f) can be
determined analytically because ˆc
a
( f
a
) is piecewise
integrable.
Let C ⊂ V be the sub-set of nodes represent-
ing centroids and let R ⊆ V ×V be a set of routes
r = (s
r
,t
r
) ∈ R , where s
r
and t
r
denote respectively
the origin- and destination centroids of route r. The
total travel demand of occupied vehicles within the
observation period are D trips and d
r
is defined as the
fractional demand representing the number of passen-
gers traveling along route r. This means the total de-
mand D =
∑
r∈R
d
r
.
The residual demand D
res
i
in centroid i is positive,
in case there is a demand in node i and negative in case
of a surplus. An additional variable y
r
a
is introduced
to represent the fractional part of the flow on route r
using link a.
The occupied vehicle flow on link a is the sum of
all fractional flows y
r
a
multiplied by the route demand
d
r
. The total vehicle flow f
a
on link a is the sum of
the occupied vehicle flow and the unoccupied vehicle
flow w
a
With the above definitions, the non-linear pro-
gramming model can be stated as follows:
minz(f) (7)
s.t.
∑
a∈δ
+
(i)
y
r
a
−
∑
a∈δ
−
(i)
y
r
a
=
1 if i = s
r
−1 if i = t
r
0 otherwise
, (8)
∀i ∈V,∀r ∈ R
∑
a∈δ
+
(i)
w
a
−
∑
a∈δ
−
(i)
w
a
= D
res
i
,∀i ∈C (9)
∑
r∈R
d
r
y
r
a
+ w
a
= f
a
,∀a ∈A, (10)
y
r
a
≥ 0, ∀a ∈A, ∀r ∈ R (11)
w
a
≥ 0, ∀a ∈A (12)
The objective function z(f) can be either replaced by
z
SO
(f) (Eq. 6) or by z
UE
(f) (Eq. 7) which allows to
determine the flows for the system optimum model
or the user equilibrium model, respectively. The con-
straints Eq. (9) (resp. Eq. (10)) guarantee flow conser-
vation of occupied (resp. unoccupied) vehicles. Con-
straint Eq. (11) makes sure that fractional flows and
unoccupied flows sum up to the total flow f
a
of each
link. The remaining constraints guarantee positive-
ness of all flows. The above solution provides not
only the total flow vector f, but also the unoccupied
flow vector of all links w = [w
0
,. ..]
0
. Furthermore,
from the total link flows, it is possible to determine
the minimum number of required vehicles N
min
for
the specific scenario:
N
min
=
∑
a∈A
c
a
f
a
. (13)
2.2 Solution Method based on the
Frank Wolfe Algorithm
This section explains how the non-linear, uncapac-
itated traffic problem stated in Eq. (8)-(13) can be
solved, based on the Frank Wolfe method.The iter-
ative algorithm can be summarized in the following
four steps:
Step 0: (Initialization) Set iteration counter k = 0 and
set upper bound to UB = +∞. Compute an initial
feasible solution for the vehicle flow vector f
0
and
the unoccupied vehicle flow vector w
0
by solving
the linear sub-problem
min
∑
a∈A
c
0
a
f
a
(14)
(10) −(13) .
with the constant link costs c
0
a
= c
a
(0)∀a ∈A.
Step 1: Calculate the direction flow vector f − f
k
by minimizing the linear programming sub-
problem with the objective function ˜z(f) = z(f
k
)+
∇z(f
k
)(f −f
k
) where z(·) represents either the ob-
jective function z
SO
for SO assignments or z
UE
for
UE assignments. The sub-problem to be solved is
min ˜z(f) (15)
(10) −(13) .
Let
˜
f and
˜
w be the solutions to this problem. Then
LB = ˜z(
˜
f) represents the lower bound with respect
to the chosen objective function. The remaining
open gap is defined by
GAP
k
= 100 ×
UB −LB
UB
where upper bound UB is updated in Step 3. The
criteria GAP
k
< ε
G
can be used as stopping crite-
ria.
Step 2: Determine λ
k
, which is the solution to the
minimization problem
λ
k
= arg min
0≤λ<1
z
f
k
+ λ
˜
f −f
k
. (16)
This is the problem of finding the minimum of z(·)
along the line segment joining the two points f
k
and
˜
f. Again, z(·) can be either of the objective
functions from Eq. 6 or Eq. 7. The criteria λ
k
< ε
L
can be used as stopping criteria.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
198
Step 3: Obtain the new feasible point,
f
k+1
= f
k
+ λ
k
˜
f −f
k
and set the new costs c
k+1
a
= ˆc
a
( f
k
a
), ∀a ∈A. Split
the unoccupied vehicle flows proportionally to the
total flows:
w
k+1
= w
k
+ λ
k
˜
w −w
k
.
The new upper bound is updated with UB =
z(f
k+1
). Increase k = k + 1 and go to Step 1.
As k →∞ both, λ
k
and GAP
k
tend to zero and the flow
vectors f
k
and w
k
converge to f and w.
This solution algorithm has been implemented in
C++. The first feasible solution Eq. (16) as well
as the approximation in Eq. (17) have been solved
by a minimum-cost linear Multi-Commodity Flow
(MCF) algorithm based on the well known Dantzig-
Wolfe decomposition approach, together with column
generation, see e.g. (Tomlin J.A. (1966); L
¨
ubbecke
M.E. et al.(2005); Frangioni A. and Gallo G.(1999)).
The implemented solver makes intensive use of the
CPLEX 12.5 libraries. The Python Numpy and SciPy
packages have been used to calculate λ
k
and to update
all cost and flow vectors.
3 RESULTS
The traffic assignment method has been applied to
two network instances, central K
¨
oln and the central
business district (CBD) of Portland. These networks
have been chosen, because the two cities represent
two completely different network topologies: The
CBD of Portland has an almost regular street grid,
while the historically grown street network of K
¨
oln
is irregular. The K
¨
oln graph has 1007 links and 702
nodes, while the smaller Portland graph has only 506
links and 333 nodes. The transport graph of both
cities has been extracted from OpenStreetMap as data
source. The OSMOSIS package has been employed
to extract the main streets subgraph and SUMO (Sim-
ulation of Urban Mobility) generated the directional
transport graph with link attributes, such as length and
speed limits.
In order to test the traffic assignment method, two
demand scenarios have been considered: a random
demand scenario, where OD-pairs have been ran-
domly selected from the set of all graph nodes; an
asymmetric demand scenario, where all trips are di-
rected from the east to the west part of Portland.
The demand level has been changed, by scaling
the number of trips between each O-D pair in order to
match a predefined total number of trips D.
The parameters of all vehicles are τ = 0.5s, a
E
=
2.5m/s
2
and L = 3.5m. In this case, the critical speed
v
crit
= 15.0km/h and the capacity q = 1656veh/h per
lane. The speed attribute of the Openstreetmap net-
work served as information for the free-flow speeds
V
a
. The link cost of an example link is shown in
Fig. 1. Regarding the link cost approximation ˆc
a
( f
a
)
from Eq. (5), the following parameters have been
used: µ = 0.1, f
B
= 1394vph and f
C
= 1525vph.
For example, a link with length `
a
= 1000m and
free flow speed V
a
= 40km/h shows an average er-
ror between exact and approximated costs of ≈ 13%
which appears to be reasonably low.
0 200 400 600 800 1000 1200 1400 1600 1800
Link flow f
a
[veh/h]
0
50
100
150
200
250
Link cost [s]
c
a
(f
a
)
ˆc
a
(f
a
)
Figure 1: Exact link cost c
a
( f
a
) and approximated link cost
ˆc
a
( f
a
) for the given vehicle parameters (see text) and an
urban road link of length `
a
= 1000m with a free flow speed
of V
a
= 40km/h.
The simulation results from the two example net-
works demonstrate the theoretical potential of fully
automated vehicles in terms of travel times, vehicle
requirements and congestion levels. First, the average
trip time
z(f)
D
has been determined for both networks,
in order to compare the results of a centralized traffic
management (System Optimum assignment SO) and
the optimization by each user (User equilibrium as-
signment UE). The result from Fig. 2 shows for the
Portland network at medium demand levels slightly
reduced trip-times using the SO assignment with re-
spect to the UE assignment. Whereas for low and
high demand levels, there is no significant difference
in trip times between the two assignment methods.
The reason is that a low demand produces no con-
gestion effects and both assignments will choose the
shortest path for all users. As demand and conges-
tions increase, the SO assignment deviates the traffic
better on alternative routes in order to avoid penalties
through congestion delays, which results in lower av-
erage trip times. For high demand levels, the network
Optimum Vehicle Flows in a Fully Automated Vehicle Network
199

is congested everywhere and there are no longer alter-
natives to save time by taking faster deviations, thus
both assignment methods produce the same average
trip times. For the K
¨
oln network (not shown), there
is no difference between the SO and UE assignment
method, most likely because of a lack of suitable route
alternatives.
Surprisingly, the share of unoccupied vehicle
flows (100×
∑
a
w
a
∑
a
f
a
) varies insignificantly with demand
D: the unoccupied vehicle share ranges from 13.6%
to 14.3% for the Portland network and from 11.6% to
11.95% for the K
¨
oln network.
0 2000 4000 6000 8000 10000 12000 14000 16000
Total Demand D
45
50
55
60
65
70
75
Av. triptime [s]
UE-4th order
SO-4th order
Figure 2: Portland network with random demand scenario.
Average trip time
z(f)
D
for different demand levels D and as-
signment methods SO (z
SO
(·)) (circles) and UE (z
SO
(·)) (tri-
angles).
The minimum number of required vehicles N
min
for the random and asymmetric demand scenarios is
shown Fig. 3. Note the strong dependency of N
min
on both, demand pattern and demand level. However,
the required number of vehicles of the shared schemes
is in both cases significantly lower than the required
number of vehicles in a non-shared scheme (which
corresponds to the number of trips D). Ratio of shared
vehicles with respect to non-shared vehicles (N
min
/D)
is 1.9% for the random demand scenario and 8.3% for
the asymmetric demand scenario.
In an attempt to quantify the impact of the unoccu-
pied vehicle flows on trip-times and congestion level,
the following assignment-scenarios have been com-
pared:
1. the SO assignment with unoccupied vehicles,
identical to the scenario shown in Fig. 2.
2. the SO assignment without unoccupied vehicles.
3. the UE assignment without unoccupied vehicles.
Scenarios 2 and 3 correspond to SO and UE assign-
ments without unoccupied vehicles, this means vehi-
cles are parked at the destination. In particular, sce-
nario 3 represents the user equilibrium of present, non
0 2000 4000 6000 8000 10000 12000 14000 16000
Total Demand D
0
50
100
150
200
250
300
350
N
min
UE-4th order
SO-4th order
(a)
0 5000 10000 15000 20000 25000
Total Demand D
0
500
1000
1500
2000
2500
3000
N
min
UE-4th order
SO-4th order
(b)
Figure 3: Minimum number of vehicles N −min for differ-
ent demand scenarios and demand levels D. Portland net-
work with (a) random demand scenario and (b) asymmetric
demand scenario.
shared car-traffic, without centralized traffic manage-
ment. The total trip-times z(f) (the sum of all, oc-
cupied and unoccupied vehicle trips) are shown in
Fig. 4 (a). One can observe that scenario 1 (the assign-
ment with unoccupied vehicle flows) has an approxi-
mately 14% higher total trip time compared with the
other scenarios (without unoccupied vehicle flows).
As the 14% correspond to the share of unoccupied
vehicles, one can conclude that the presence of unoc-
cupied vehicle flows does not prolongate the occupied
vehicle trips.
A clearer picture can be gained by looking at con-
gested links — a link a is considered congested if the
travel speed is below free-flow speed, which means
f
a
>
1
T (V
a
)
. Figure 4 (b) shows that the numbers of
congested links in scenario 1 is almost equal to the
one of scenario 3, which is the assignment without
unoccupied vehicles and UE assignment. In case of
the investigated Portland network, the results suggest
that the additional unoccupied vehicle flows do obvi-
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
200

2000 4000 6000 8000 10000
Total Demand D
0
20
40
60
80
100
120
140
160
Total triptimes [h]
SO-4th order approx
SO-4th order approx, no empty
UE-4th order approx, no empty
(a)
2000 4000 6000 8000 10000
Total Demand D
0
5
10
15
20
25
Share of congested arcs [%]
SO-4th order approx
SO-4th order approx, no empty
UE-4th order approx, no empty
(b)
Figure 4: Three assignment with Portland network with ran-
dom demand scenario: Scenario 1 (SO-4th order approx),
Scenario 2 (SO-4th order approx, no empty) and Scenario 3
(SO-4th order approx, no empty). (a) Total trip times z(f)
and (b) Share of congested links (=arcs).
ously add to the total trip times, but they do not add
to congestion levels. In other words, the unoccupied
vehicles do not cause delays for the occupied vehicles
in case of a central traffic management. However, this
result cannot be generalized as it may be due to the
particular one-way grid of the Portland network.
4 CONCLUSIONS
The traffic assignment method developed in this work
has allowed to determine the optimal flows of a net-
work with automated vehicle traffic, considering also
unoccupied vehicle trips, a decentralized or central-
ized traffic management and a minimum safe head-
way vehicle-spacing. The assignment problem has
been solved with a method based on the well known
Frank-Wolfe algorithm.
The assignment models have been applied to two
example networks: the centers of Portland and K
¨
oln.
As expected, for moderately congested networks the
SO assignment has resulted in lower average trip
times with respect to the UE assignment. The dif-
ference between SO and UE has been notably larger
for the Portland network, most likely due to its grid-
network, offering more route alternatives for the SO
assignment algorithm to distribute flows.
The number of required shared, automated vehi-
cles depends strongly on the network and demand pat-
terns. The ratio of shared vehicles with respect to non-
shared vehicles to satisfy the same demand has been
found to be in the range of 1.9 −8.3% for Portland
center.
In order to study the impact of unoccupied vehicle
flows, the SO and UE traffic assignments have been
applied to the Portland network with and without the
generation of unoccupied vehicle trips (comparison of
shared and non shared scenario). The results suggest
that a centrally optimized traffic management could
prevent unoccupied vehicles from delaying occupied
vehicles. However, this is not generally true and de-
pends on the network topology and demand patterns.
The proposed assignment models do have limi-
tations. The derived link cost-function is an over-
simplification of the real network, neglecting junc-
tions and multiple lanes. The share of unoccupied ve-
hicles depends predominantly on the location of ori-
gins and destinations (11% - 14% in case of randomly
chosen origins/destinations and 39% - 48% in case of
a strongly asymmetric demand in Portland center).
The presented assignment algorithm is useful for
strategic planning, network design, technology as-
sessments and benchmarking of real-time traffic man-
agements of automated vehicle networks. An interest-
ing future research topic is to use this fast, static traffic
assignments as short term predictors within a vehicle
scheduling process.
REFERENCES
NHTSA’S Office of Behavioral Safety Research 2012
Some theoretical aspects of road traffic re-
search. facts DOT HS 811 611. http://www-
nrd.nhtsa.dot.gov/CATS/index.aspx
Wardrop J.G. (1952) Some theoretical aspects of road traffic
research. Proc. Inst. Civ. Eng. 2: pp. 325-378.
Frank H. and Wolfe P. (1956) An Algorithm for quadratic
programming, Naval Research Logistics Quarterly, 3,
pp. 95-110.
Beckmann M.J. (1965) On optimal tolls for highways, tun-
nels and bridges Vehicular Traffic Science, American
Elsevier, New York (1965), pp. 331341.
Optimum Vehicle Flows in a Fully Automated Vehicle Network
201

Sheffi Y. (1985) Urban Transportation Networks: Equi-
librium Analysis with Mathematical Programming
Methods Prentice-Hall, Englewood Cliffs, NJ (1985)
Ouorou A., Mahey P., Vial J.-Ph. (2000) A Survey of Al-
gorithms for Convex Multicommodity Flow Problems
Management Science INFORMS Vol. 46, No. 1, pp.
126-147
Yang H., Huang H. J. (1998), Principle of marginal-cost
pricing: How does it work in a general network?
Transportation Research, 32A (1998), pp. 45-54
Patriksson M. (1994), The Traffic Assignment Problem:
Models and Methods, VSP, Utrecht, the Netherlands.
Nie Y., Zhang H.M., Lee D. (2004) Models and algorithms
for the traffic assignment problem with link capac-
ity constraints Transportation Research Part B 38, pp.
285312
Xu M., Qu Y., Gao Z. (2008) Implementing Frank-Wolfe
Algorithm under Different Flow Update Strategies
and Line Search Technologies, J Transpn Sys Eng &
IT, 8(3), pp. 14-22
Cascetta E. (2001) Transportation systems engineering:
theory and methods. Kluwer Academic Publisher
Inouea S., Maruyama T. (2012) Computational Experience
on Advanced Algorithms for User Equilibrium Traffic
Assignment Problem and Its Convergence Error, Pro-
cedia - Social and Behavioral Sciences 43, pp. 445-
456
Tomlin J.A. (1966) Minimum-Cost Multicommodity Net-
work Flows. Operations Research, pp. 45-51.
L
¨
ubbecke M.E., Desrosiers J. (2005) Selected topics in col-
umn generation. Operations Research, 53.6: pp. 1007-
1023.
Frangioni A., Gallo G. (1999) A bundle type dual-ascent ap-
proach to linear multicommodity min-cost flow prob-
lems. INFORMS Journal on Computing, 11.4: pp.
370-393.
Andr
´
easson, I (1994). Vehicle Distribution in Large Per-
sonal Rapid Transit Systems. Transportation Research
Record, No. 1451, pp 95-99, Transportation Research
Board, Washington, D.C.
Schweizer J., Danesi A., Rupi F.,Traversi E. (2012) Com-
parison of static vehicle flow assignment methods and
microsimulations for a personal rapid transit network,
J. Adv. Transp.; 46: pp. 340-350
Lees-Miller J.D, Hammersley J.S, Wilson R.E (2010) The-
oretical Maximum Capacity as a Benchmark for
Empty Vehicle Redistribution in Personal Rapid Tran-
sit, Journal of the Transportation Research Board,
No. 2146, pp 76-83, Transportation Research Board,
ISSN: 0361-1981
Koskinen K., Luttinen T., Kosonen I. (2007) Developing a
microscopic simulator for personal rapid transit (PRT)
systems, Transportation Research Board 86th Annual
Meeting, Washington, D.C.
Horowitz R. and Varaiya P. (2000) Control design of auto-
mated highway system, IEEE Proc., vol. 88, no. 7.
Li P., Alvarez L., and Horowitz R. (1997) “AHS safe con-
trol laws for platoon leaders,” IEEE Trans. Contr. Syst.
Technol., vol. 5, no. 6, pp. 615–628.
J. Schweizer (2004) Non-linear feedback control for short
time headways based on constant- safety vehicle-
spacing. In IEEE Intelligent Vehicles Symposium, pp.
167 - 172.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
202
