
A Morphological LiDAR Points Cloud Filtering Method based on
GPGPU
Shuo Li
1
, Hui Wang
1
, Qiuhe Ma
1
and Xuan Zha
2
1
Zhengzhou Institute of Surveying & Mapping, No.66, Longhai Middle Road, Zhengzhou, China
2
Tianjin Institute of Hydrographic Surveying and Charting, No.40, Youyi Road, Tianjin, China
Keywords: LiDAR, Morphology, Points Cloud Filtering, GPU, CUDA.
Abstract: Because of its large amount of data, airborne LiDAR points cloud filtering is often time-consuming. On the
basis of the traditional morphological LiDAR points cloud filtering, a method which adopted the parallel
technique based on GPU and assigned the massive operations to be parallel executed in many computing
unit to achieve the purpose of fast filtering was proposed. Through the corresponding experiments, the
validity and efficiency of the proposed LiDAR points cloud filtering method were verified.
1 INTRODUCTION
GPGPU (General Purpose Computing on Graphics
general Processing Units) is proposed by
SIGGRAPH (Special Interest Group for Computer
GRAPHICS) in 2003. GPGPU applies
heterogeneous computing resources for large-scale
parallel computing, rather than merely make use of
GPU for general computing (Qiu, 2011). NVIDA
launched a new general computing product of GPU
in 2007, CUDA (Compute Unified Device
Architecture), deeply influencing the development
of GPGPU and graphics.
The traditional serial algorithm is improved
based on CUDA C language, effectively reducing
the running time of the algorithm with the full use of
the powerful parallel computing capability and
floating point data processing speed of GPU.
LiDAR (Light Detection and Ranging) has a
broad development prospect in the field of remote
sensing, because it can obtain the 3D information of
the space surface rapidly. LiDAR is a remote
sensing technology that has developed rapidly in
recent years. It can realize the synchronous, rapid
and precise acquisition of the spatial 3D coordinates,
providing a simple and effective technique for the
rapid achievement of spatial information (Zhu,
2006).
LiDAR data filtering is a process of removing
non-ground points from laser points data and
extracting digital elevation model (DEM) (Zhang,
2007). Existing filtering algorithms can be divided
into four categories: slope-based, the smallest block,
surface-based and clustering/seg-mentation (Sithole,
2004). The morphology method belongs to the
surface-based methods. It was proposed by
Lindenberger of University of Stuttgart in 1993 and
was improved by many scholars subsequently.
Kilian (1996) added the weight factors in the method,
and Zhang (2003) proposed a progressive
morphological filtering method based on gradually
increasing the window size of the filtering and using
elevation difference thresholds. It is notable that
filtering and the corresponding quality control are
the most pivotal and time-consuming step in the
subsequent progress of LiDAR to generate DEM,
accounting for approximately 60% to 80% of the
processing time (Sithole, 2004). Therefore, rapid
implementation of LiDAR points cloud filtering
becomes an urgent problem to be solved, when the
amount of data is large.
To solve this problem, Sui (2010), Li (2011) and
Zhang (2009) improved the existing morphology
filtering methods to filter rapidly. However, the
improved algorithms and the original algorithms are
serial, of which calculation unit is CPU. A
morphology filtering method is proposed in this
paper based on GPGPU, effectively improving the
efficiency of the subsequent processing of LiDAR
data.
80
Li, S., Wang, H., Ma, Q. and Zha, X.
A Morphological LiDAR Points Cloud Filtering Method based on GPGPU.
In Proceedings of the 2nd International Conference on Geographical Information Systems Theor y, Applications and Management (GISTAM 2016), pages 80-84
ISBN: 978-989-758-188-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
2 MORPHOLOGY FILTERING
The proposed method mainly includes three key
steps: establishing the virtual grid based on the
original discrete points cloud, morphology filtering
based on virtual grid and judging the attributes of all
points. The specific principles are as follows.
2.1 Establishing the Virtual Grid
The establishment of virtual grid is not the
interpolation of the raw data, but building a virtual
grid capable of indexing to each discrete point. The
point is assigned to the corresponding grid according
to the plane coordinate. The calculation formula is as
follows:
min
min
()/
()/
1/
I
X-X c
J
Y-Y c
cn
⎧
=
⎪
=
⎨
⎪
=
⎩
(1)
c: sampling interval; n: number of points; X
min
: the
minimum abscissa; Y
min
: the minimum ordinate;
(),XY
: coordinates of the discrete point.
2.2 Morphology Filtering
Mathematical morphology method for extracting
image information has mature theory basis. It is
based on two basic operations, dilation and erosion.
Open operation and close operation are two different
combinations of the two operations.
The digital surface model of airborne laser data
can also be processed based on mathematical
morphology. If the coordinate of a grid point p is
(, ,)
x
yz
, the dilation of z is as follows:
(,)
max ( )
pp
p
p
xy W
dz
∈
=
(2)
W: window size;
(, ,)
ppp
x
yz
: coordinates of a
point in the neighbourhood of point p.
The window of the method is a 2D square
window. The output of the dilation is the maximum
elevation.
Similarly, the formula of the erosion is as
follows:
(,)
min ( )
pp
p
p
xy W
dz
∈
=
(3)
The result of the erosion is the minimum elevation.
Open operation is the dilation after erosion, and
close operation is the erosion dilation.
Mathematical morphological filtering of laser
data is the opening operation in essence. Firstly, the
discrete points of trees and objects which are smaller
than the window size are removed based on erosion.
Secondly, the boundaries of the objects which are
bigger than window size are restored according to
dilation.
2.3 Judging the Attributes of All Points
The elevation difference between the point in the
virtual grid and the representative point is compared
with the threshold to determine whether the point
has the same attribute with the representative point.
All points are processed in this way to distinguish
the ground points from the non-ground points.
3 ACCELERATION STRATEGY
BASED ON GPGPU
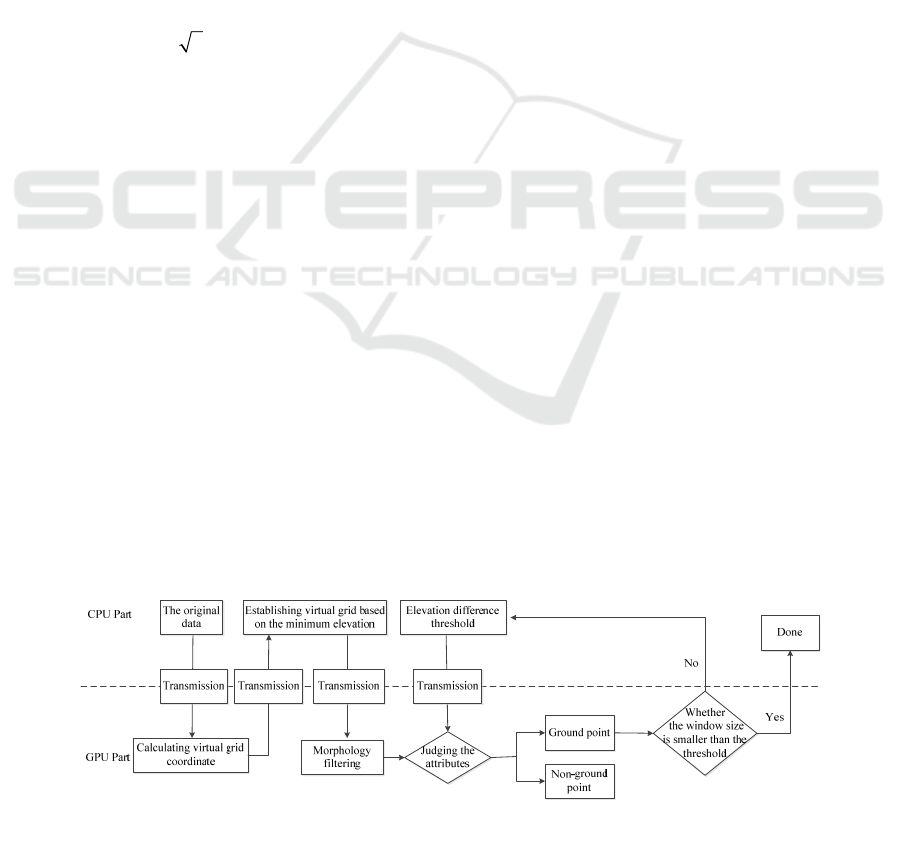
As is shown in Figure 1, the proposed algorithm is a
parallel improvement of the traditional serial LiDAR
points cloud filtering method. The figure is divided
into CPU part and GPU part by the dotted line. The
data processing steps above the dotted line are
executed in CPU and steps below the dotted line are
implemented in GPU. The transmission block
indicates the data transmission between the host
memory and the GPU video memory and the
corresponding arrow manifests the direction of data
transmission.
Figure 1: The flow of morphology filtering based on GPGPU.
A Morphological LiDAR Points Cloud Filtering Method based on GPGPU
81

3.1 Acceleration Strategies of
Establishing Virtual Grid and
Judging Attributes of All Points
The process to establish virtual grid has the
following characteristics:
The processing flows of all points are the same.
The virtual grid coordinate of each point is
calculated as formula (1).
The points are irrelevant. The calculation of one
point is independent of the results of other
points.
The amount of data is large. The amount of
points cloud is generally millions or even more.
The above characteristics are in line with the SIMT
(Single Instruction Multiple Threads) model of
CUDA. The process can be improved to be parallel,
the specific strategy are as follows:
After the original points cloud is read in the
memory, the discrete points cloud data is copied to
the GPU video memory so that the calculation unit
of GPU can access the original data. The data is
assigned to different threads to be processed
respectively by the program based on SIMT model,
making use of multiple calculation units of GPU to
achieve the purpose of parallel calculation. In other
words, the gird coordinate of the point is calculated
in parallel by all calculation units of GPU.
The process of judging the attributes of all points
is similar to the above calculation, so it can be
accelerated in the same way.
3.2 Acceleration Strategy of
Morphology Filtering
The elapsed time of morphology calculation
accounts for more than 50 percent of all the filtering
time in traditional serial algorithm. The acceleration
of morphology calculation is a key step to the
implementation of rapid filtering. The improvement
strategies of morphology filtering are as follows:
The virtual grid data is bound to texture memory
to accelerate the accessing in the GPU part. The
size of the whole virtual gird data is compared to
the maximum size of 2D texture to which GPU is
bound. If the size of the virtual grid data is
bigger than the maximum size, the virtual grid
data will be processed in the divided blocks. A
block data will be stored to the video memory
and bound to 2D texture in GPU part at a time.
And all results will be merged into a whole after
all the block data is calculated. If the size of the
virtual grid data is smaller than the maximum
size, all virtual grid data will be stored to the
video memory and bound to 2D texture.
Erosion of data bound to texture memory is the
first step in the process of morphological
opening operation. The output is stored to the
global memory and bound to texture memory.
Then dilation is implemented to achieve the
result of the open operation.
The erosion and dilation of points are assigned to
different threads to be processed for the purpose
of parallel calculation. Thread organization mode
should be set according to the actual hardware
environment to ensure the high utilization of
computing resources.
The function "_syncthreads" provided by CUDA
is used to ensure thread synchronization, judging
whether all open operations in the area are
executed.
The window size is increased in GPU part
according to the window size and elevation
difference threshold acquired from CPU part.
The process is iterated to judge the attributes of
the points until the parameters meet the stop
condition.
4 EXPERIMENTS
4.1 Experimental Environment
The experimental hardware environments are Intel
i5 dual core 2.9GHz CPU, 8G memory and 1G video
memory of ASUS GTX 570 graphics card. The
experimental software environments are Windows7
operating system, Microsoft Visual Studio 2010
development environment, C++ programming
language and CUDA 4 parallel development kit.
The experimental data is 15 sample data
provided by ISPRS. The statistic of error rate of
filtering algorithm is based on the referential
filtering result of the corresponding sample.
4.2 Results and Analysis
4.2.1 Evaluation of Filtering Results
The experimental data is points cloud data of
Vaihingen/Enz and Stuttgart captured by ALTM of
Optech, provided by the Commission
Ⅲ of ISPRS in
2003. The former nine samples (Sample11-
Sample42) are urban data, of which the point
distance is 1-1.5m. The latter six samples
(Sample51-Sample71) are mountain data, of which
GISTAM 2016 - 2nd International Conference on Geographical Information Systems Theory, Applications and Management
82

the point distance is 2-3.5m. The data is subdivided
into several types (Chen, 2007).
The results of three samples are shown in Figure
2, Figure 3 and Figure 4 respectively. Figure 2(a),
Figure 3(a) and Figure 4(a) are three terrain maps
based on the original data. Figure 2(b), Figure 3(b)
and Figure 4(b) are three terrain maps based on
filtering results of the proposed algorithm. Figure
2(c), Figure 3(c) and Figure 4(c) are three terrain
maps based on the referential filtering results. It is
obvious that the proposed algorithm is capable of
filtering the objects in the samples, such as houses,
plants, bridges and so on.
ISPRS group has adopted 8 filtering methods
based on 15 samples (Lee, 2003). The results and the
result of the proposed algorithm are shown in table 1.
The first row in the table 1 is the names of methods.
The error rates of the results are below the names
(Huang, 2009).
Compared with the 8 classical algorithms, the
total error rate of the proposed algorithm is stable on
the whole and ranks high. This fully shows that the
proposed algorithm can adapt to various terrain. The
reliable filtering proves the effectiveness of the
proposed algorithm.
(a): Sample23. (b): Sample23. (c): Sample23.
Figure 2: The filtering results of houses.
(a): Sample51. (b): Sample51. (c): Sample51.
Figure 3: The filtering results of plants.
(a): Sample71. (b): Sample71. (c): Sample71.
Figure 4: The filtering results of bridges.
4.2.2 Comparison of Filtering Efficiency
The elapsed time reflects the efficiency of filtering.
When processing the same data, the shorter the
elapsed time, the higher the efficiency.
In order to verify the efficiency of the proposed
algorithm, the proposed algorithm based on GPGPU
is compared with the traditional serial morphological
algorithm. The data is several LiDAR points cloud
data of different size. As shown in table 2, the ten
samples are sorted from small to large according to
the number of points. The statistical results are
shown in table 2 and the corresponding elapsed time
is shown in Figure 5.
As is shown in Table 2 and Figure 5, the elapsed
time of the traditional serial algorithm increases
linearly with the amount of the LiDAR points cloud
growing up and faster than that of the proposed
Table 1: Total Error Rates of Nine Algorithms.
Sample
Total Error Rate (%)
Rank
Elmvist Sohn Axelsson Pfeifer Brovelli Roggero Wack Sithole The Proposed Algorithm
Samp11 22.40 20.49 10.76 17.35 36.96 20.80 24.02 23.25 13.80 2
Samp12 8.18 8.39 3.25 4.50 16.28 6.61 6.61 10.21 6.77 5
Samp21 8.53 8.80 4.25 2.57 9.30 9.84 4.55 7.76 1.96 1
Samp22 8.93 7.54 3.63 6.71 22.28 23.78 7.51 20.86 6.81 3
Samp23 12.28 9.84 4.00 8.22 27.80 23.20 10.97 22.71 7.67 2
Samp24 13.83 13.33 4.42 8.64 36.06 23.25 11.53 25.28 10.23 3
Samp31 5.34 6.39 4.78 1.80 12.92 2.14 2.21 3.15 1.86 2
Samp41 8.76 11.27 13.91 10.75 17.03 12.21 9.01 23.67 9.42 3
Samp42 3.68 1.78 1.62 2.64 6.38 4.30 3.54 3.85 2.11 3
Samp51 23.31 9.31 2.72 3.71 22.81 3.01 11.45 7.02 6.89 4
Samp52 57.95 12.04 3.07 19.64 45.56 9.78 23.83 27.53 20.36 5
Samp53 48.45 20.19 8.91 12.60 52.81 17.29 27.24 37.07 14.14 3
Samp54 21.26 5.68 3.23 5.47 23.89 4.96 7.63 6.33 3.34 2
Samp61 35.87 2.99 2.08 6.91 21.68 18.99 13.47 21.63 4.26 3
Samp71 34.22 2.20 1.63 8.85 34.98 5.11 16.97 21.83 3.73 3
A Morphological LiDAR Points Cloud Filtering Method based on GPGPU
83

Table 2: Acceleration Rate.
Sample
Number of points (Thousand)
The elapsed time of the proposed parallel
algorithm(s)
The elapsed time of the serial
morphological algorithm(s)
Acceleration rate
1 100 0.078 0.109
1.4
2 200 0.094 0.203
2.2
3 300 0.109 0.297
2.7
4 500 0.156 0.500
3.2
5 1000 0.210 1.060
5.0
6 2000 0.390 2.100
5.4
7 3000 0.480 2.900
6.0
8 4140 0.630 4.493
7.1
algorithm. The acceleration rate stays stable after a
sharp climb. Two primary reasons are as follows:
The traditional serial algorithm is implemented
in CPU. Since CPU has only one calculation
unit, so the elapsed time will be longer if the
amount of data increases. On contrary, GPU has
several calculation units so that the elapsed time
of the proposed algorithm increases more slowly
than that of the traditional serial algorithm.
The computing resources are not used fully when
the amount of data is small. Thus, the
acceleration rate is low. The larger the amount of
data, the more the resources are used and the
higher the acceleration rate. The acceleration rate
stays stable when the resources are fully used.
Figure 5: Comparison of the elapsed time.
5 CONCLUSIONS
GPGPU is applied in morphology filtering method
for the purpose of parallel filtering. The proposed
method of morphological LiDAR points cloud
filtering can remove non-ground points effectively
and better meet the filtering requirements. Moreover,
it is a reliable and efficient LiDAR point cloud
filtering method, which has certain practical value.
REFERENCES
Qiu, D., Y., 2011. GPGPU Programming. China Machine
Press,Beijing, China, pp. 9-10.
Zhu, S., C., 2006. The Technique Principle of LiDAR and
Its Application in Surveying and Mapping. Modern
Surveying and Mapping, 4(7), pp. 12-13.
Zhang, X., H., 2007. The Theory and Method of
Measuring Technology of Airborne Laser Radar.
Wuhan University press, Wuhan, China, pp. 42-43.
Sithole, G., Vosselman, G., 2004. Experimental
Comparison of Filter Algorithms for Bare Earth
Extraction from Airborne Laser Scanning Point
Clouds. ISPRS Journal of Photogrammetry and
Remote Sensing, 59(1), pp. 85-101.
Kilian, J., Haala, N., Englich, M., 1996. Capture and
Evaluation of Airborne Laser Scanner Data.
International Archives of Photogrammetry and
Remote Sensing, 31(B3), pp. 383-388.
Zhang, K., Q., Chen, S., C., Whitman, D., et al 2003. A
Progressive Morphological Filter for Removing
Nonground Measurements from Airborne LiDAR
Data. IEEE Transactions on Geoscience and Remote
Sensing, 41(4), pp. 872-882.
Sui, L., C., Zhang, Y., B., Liu, Y., et al, 2010. Filtering of
Airborne LiDAR Point Cloud Data Based on the
Adaptive Mathematical Morphology. Acta Geodaetica
et Cartographica Sinica, 4(39), pp. 390-395.
Li, P., C., Wang, H., Liu, Z., Q., et al, 2011. A
Morphological LiDAR Points Cloud Filtering Method
Based on Scan Lines. Journal of Geomatics Science
and Technology, 28(4), pp. 274-277.
Zhang, Y., B., Sui, L., C., Qu, J., et al, 2009. Fast Filtering
of Airborn LiDAR Point Cloud Data Based on
Mathematical Morphology. Bulletin of Surveying and
Mapping, 5, pp. 16-19.
Chen, Q., Gong, P., Baldocchi, D., et al, 2007. Filtering
Airborne Laser Scanning Data with Morphological
Methods. Photogrammetric Engineering and Remote
Sensing, 73(2), pp. 175-185.
Lee, H., S., Younan, N., H., 2003. DTM Extraction of
LiDAR Returns via Adaptive Processing. IEEE
Transactions on Geoscience and Remote Sensing,
41(9), pp. 2063-2069.
Huang, X., F., Li, H., Wang, X., et al, 2009. Filter
Algorithms of Airborne LiDAR Data: Review and
Prospects. Acta Geodaetica et Cartographica Sinica,
38(5), pp. 466-469.
GISTAM 2016 - 2nd International Conference on Geographical Information Systems Theory, Applications and Management
84
