
Reasoning on Uncertainty in Smart Environments
Alencar Machado
1,2
, Vinícius Maran
3
, Iara Augustin
2
, João Carlos Lima
2
,
Leandro Krug Wives
4
and José Palazzo Moreira de Oliveira
4
1
Colégio Politécnico, Universidade Federal de Santa Maria (UFSM), Santa Maria, Brazil
2
Programa de Pós-Graduação em Informática, Universidade Federal de Santa Maria (UFSM), Santa Maria, Brazil
3
Coordenadoria Acadêmica, Universidade Federal de Santa Maria (UFSM), Santa Maria, Brazil
4
PPGC Instituto de Informática, Universidade Federal do Rio Grande do Sul (UFRGS), Porto Alegre, Brazil
Keywords: Semantic Web, Uncertainty, Smart Environments, Probabilistic Ontologies.
Abstract: Currently, There Is a Convergence of Systems for Smart Environments and Uncertainty Reasoning. Context
Models Are Being Proposed to Support the Detection of Situations in These Environments. However,
Reasoning to Detect Situations Taking into Account Uncertainty Presents a Great Challenge. This Paper
Describes a Contextual Model based on Semantic Web Technologies That Can Deal with Uncertainty. This
Framework May Be Used to Detect Unwanted Situations with a Certain Grade of Contextual Uncertainty.
the Model Was Evaluated in a Scenario Reasoning over Uncertain Data to Predict Unwanted or Perhaps
Dangerous Situations.
1 INTRODUCTION
Homes are becoming Intelligent Environments, able
to assist people who live into it. These systems are
planned to act according to the user profile, and with
complex physical environment, where objects are
added, updated or changed of location. The user
profile also changes over time. For instance, users
may suffer from different diseases during their lives,
and these can affect the interaction with the objects
of their residence. Cognitive problems, such as
forgetfulness, can sometimes put the user into an
unwanted or perhaps dangerous situation; for
instance, forgetting the stove on after preparing a
meal.
Systems for Ambient Assisted Living need to
interpret the context in which the user lives to be
able to act in advance. Using ontologies to represent
the contextual model is the most complete and
expressive way to support reasoning about the user
context for intelligent systems (Strang and Linnhoff-
Popien, 2004) (Bettini et al., 2010). The ontologies
have some constructors that give support the
reasoning about the model domain. Some studies
show contextual models for different domains
(Sixsmith et al., 2009) (Tazari et al., 2010). These
efforts search to model the user's context and
support systems for decision making on situations of
interest. Some works try to support systems in
reasoning about uncertainty (Coronato, 2012)
(Coronato and De Pietro 2013) (Rasch et al., 2011)
(Forkan et al., 2015). These works present
contextual models using ontologies that are
implemented in Ontology Web Language –
Description Logic (OWL-DL).
The main limitation for reasoning about
uncertainty in OWL-DL is the conceptual
foundation of DL, a subset of First Order Logic
(FOL). FOL defines sentences, axioms, that are
always true logical statements about the domain to
which they are representing (Costa et al., 2011)
(Laskey, 2008). However, for systems that seek to
detect situations and make decisions in real
environments, where data may have an error rate,
low but present, it becomes imperative to support
detection of situations and decision-making on
uncertain data. Also the information obtained from
the sensors must be interpreted and this
interpretation normally is surrounded with
uncertainty.
To manage these challenges, some research
efforts try to manipulate information modelled in
ontologies and submit this information to prediction
algorithms using fuzzy logic, neural networks, or
Bayesian networks (Coronato and De Pietro 2013).
These strategies have purely statistical results as the
240
Machado, A., Maran, V., Augustin, I., Lima, J., Wives, L. and Oliveira, J.
Reasoning on Uncertainty in Smart Environments.
In Proceedings of the 18th International Conference on Enterprise Information Systems (ICEIS 2016) - Volume 2, pages 240-250
ISBN: 978-989-758-187-8
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

prediction is made without the semantic information
contained in the ontological representation.
Consequently, it is necessary that the ontological
contextual models represent the context uncertainty.
Also, it is necessary to have a native support for
reasoning about uncertainty within the context
model. This approach gives more possibility to the
detection of situations and decision making made
with incomplete information.
This paper presents a context model using for
reasoning over uncertainty in smart environments.
More specifically, we employed a Multi-Entity
Bayesian Network (MEBN) for the developing of
semantic model to support the prediction of
unwanted situations in smart environments. The
model is evaluated through empirical experiments
using a case study where an unwanted situation is
simulated. In the case study is presented the use of
the context model which supports reasoning about
uncertainty. It is shown as the model supports the
automatic generation of Bayesian Networks in a
specific situation depending on the available
evidence within the ontology.
This paper is organized as follows. Section 2
discusses the background and related work. Section
3 presents the model for developing the context of
AAL with reasoning with uncertainty in smart
environments. Section 4 describes the developed
case study. Finally, Section 5 discusses our
conclusions and future work.
2 BACKGROUND AND RELATED
WORK
The user interaction with devices in a real-world
environment is uncertain by nature. This
communication is influenced by several factors, such
as the knowledge that the user has about using a
device, the cognitive ability, and the humour of the
user, among others.
There are big challenges for the design of AAL
systems. Currently, the context aware area is
consolidating systems for smart environments.
Context can be understood as “the environment in
which the system operates” (Ye et al., 2011). Dey
and Abowd (1999) characterize context as the
situation of an entity in an environment. The concept
of situation is utilized to characterize the state of the
user environment.
Ye, Stevenson and Dobson (2011) define
situation as the abstraction of the events occurring in
the real world that are derived from the context and
hypotheses about how the observed context relates
to factors of interest. Systems that manipulate the
context detecting situations of interest through
events generated by user’s interaction must handle
uncertainty to assist correctly users in their living
environment.
2.1 Reasoning on Uncertainty
Reasoning for detection of situation and decision
making with uncertain data comprises some
shortcomings related to modeling with regard to the
modeler conception of the world. The modeling
process may have misconceptions and possibly will
be addressed through consistency checks of the
ontologies. Hence, this fact must be taken into
consideration and can be treated through
probabilistic reasoning.
Probabilistic reasoning might support the
processing of uncertainty. It is possible to make
predictions of future situations taking uncertainty
into account. Many works that focuses on the
prediction phase has been published and they present
algorithms to identify the future with an acceptable
accuracy (Paganello and Giuli, 2011).
Ontologies provide a range of features that
search for represent the environmental context in a
broad and expressive form. Context modeling using
ontologies is currently done through the use of the
Ontology Web Language (OWL). Among its
variations (Lite, DL and Full), the most widely used
by the possibility of decidability is the Description
Logics (DL). The interpretation of a theory
determines the definition of each constant, predicate
and symbolic function in relation to the area. Each
symbolic constant denotes a specific entity; each
predicate denotes a group containing entities that the
predicate holds, and each symbolic function is a
function defined in the domain. The logical
sequences of a set of axioms consist of sentences
that are always true in all interpretations, also called
true sentences. Due to sentences be always
interpreted as logical assertions, DL is not suitable
for areas where there are uncertainties in relations
among the concepts (Laskey, 2008).
One way to model uncertainty is the use of
probability, and a suitable model for existing
domains is the Bayesian Networks (BN). These are
Directed Acyclic Graphs representing a distribution
function of joint probabilities of variables in a
domain of interest. Each Bayesian network consists
of nodes (random variables) and edges connecting
these nodes. These links represent the influence
from one node (ancestor) in relation to another node
Reasoning on Uncertainty in Smart Environments
241
(descendent) generating a directed arc. Each node
has a Conditional Probability Table (CPT) to
calculate the influence of a parent node "x" in
relation to its influenced node "y", and the joint
probability distribution is measured by the influence
of every parent in relation to a leaf node (Friedman
et al., 1997).
For Semantic Web applications, BNs have the
potential to provide a powerful, compact structure
for probabilistic inference mechanisms. However,
BNs have some key limitations. The first is that the
number of variables must be known in advance (i.e.
number of nodes is fixed). However, many domains
require reasoning about numbers and types of related
entities, where the relationships among entities
cannot be specified in advance or are uncertain. The
second limitation is that the language used to specify
BNs is not powerfull enough to express significant
problems with repeated structure. The third one is
that a BN is a directed acyclic graph, and hence no
native support for recursion is provided (Costa et al.,
2011).
2.2 Probabilistic Ontologies
The area of probabilistic ontologies appeared with
the objective of using the expressive power of the
First-Order Logic and the treatment of uncertainty
supported by Bayesian Networks. In general, there
are two approaches to the generation of probabilistic
ontologies. The first consists in representing
uncertainty by probability values described as
annotations, such as (Yang and Calmet, 2005).
However, annotate ontology with numerical
probability is not enough, and some information is
lost with the lack of representation capturing the
structural constraints and dependencies between
nodes (Laskey, 2008). The second alternative
consists of using a First-Order Probabilistic
Language, which combines aspects of probabilistic
representation with first-order logic (Howard and
Stumptner, 2014).
According to Costa (2005), a probabilistic
ontology must be able to properly represent: the (i)
types of entities that exist in the field; the (ii)
properties of these entities; the (iii) relationships
between entities; the (iv) processes and events
happening with these entities; the (v) statistical
regularities that characterize the domain; the (vi)
inconclusive knowledge, ambiguous, incomplete,
unreliable related to domain entities; and (vii)
uncertainty over all previous forms of knowledge. It
should be noted that the term entity refers to any
concept that can be described and reasoned in an
application domain. Probabilistic ontologies are used
to describe comprehensively the knowledge of a
domain and associated uncertainty, structured and
shareable, preferably in a format that can be read
and processed by the computer (Fenz, 2012).
Howard & Stumpter (2014) compare those
languages (First-Order Probabilistic Languages) in
relation to (i) aspects for handling uncertainty, (ii)
structural support related to types of inheritance (iii)
types of fields on which the language may represent
and (iv) reasoning techniques on a group of entities
and relationships. An overview of this comparison is
presented in Table 1.
In Table 1, attribute means uncertainty about the
attributes of entities and relationships. Numeric
indicates the uncertainty of numerical data entities in
a domain. Reference means uncertainty about the
relationship between domain entities. Existence
means uncertainty about the existence (or not) of
entities and their relationships in the area. Types
mean when an entity of interest is identified, but it
can be one or more of possible subtypes. Analyzing
data present in Table 1, the languages Probabilistic
Relational Models (PRMs), Object-Oriented
Probabilistic Relational Modeling Language
(OPRML) e Multi-Entity Bayesian Networks
(MEBNs) are compared, and in this paper we choose
to use the MEBNs language to represent uncertainty.
Table 1: Languages for Uncertainty Representation.
PRMs MEBNs OPRML
Uncertainty Attribute X X X
Numeric X X X
Reference X X X
Identity X X
Existence X X X
Type X
Inheritance Simple X X
Multiple X
Domain Static X X X
Recursive X X X
Dynamic X X
Adapted from Horward & Stumpter (2014).
To make possible the use of MEBN in Semantic
Web an OWL extension was created through an
upper ontology called Probabilistic Ontology Web
Language (PR-OWL). That extension expresses a
probability distribution on interpretations of any
first-order theory. PR-OWL was built to be
interoperable with non-probabilistic ontologies.
However, the probabilistic definitions of an ontology
have to form a theory about the fragments of the
complete or partial valid world (Carvalho et al.,
ICEIS 2016 - 18th International Conference on Enterprise Information Systems
242
2013).
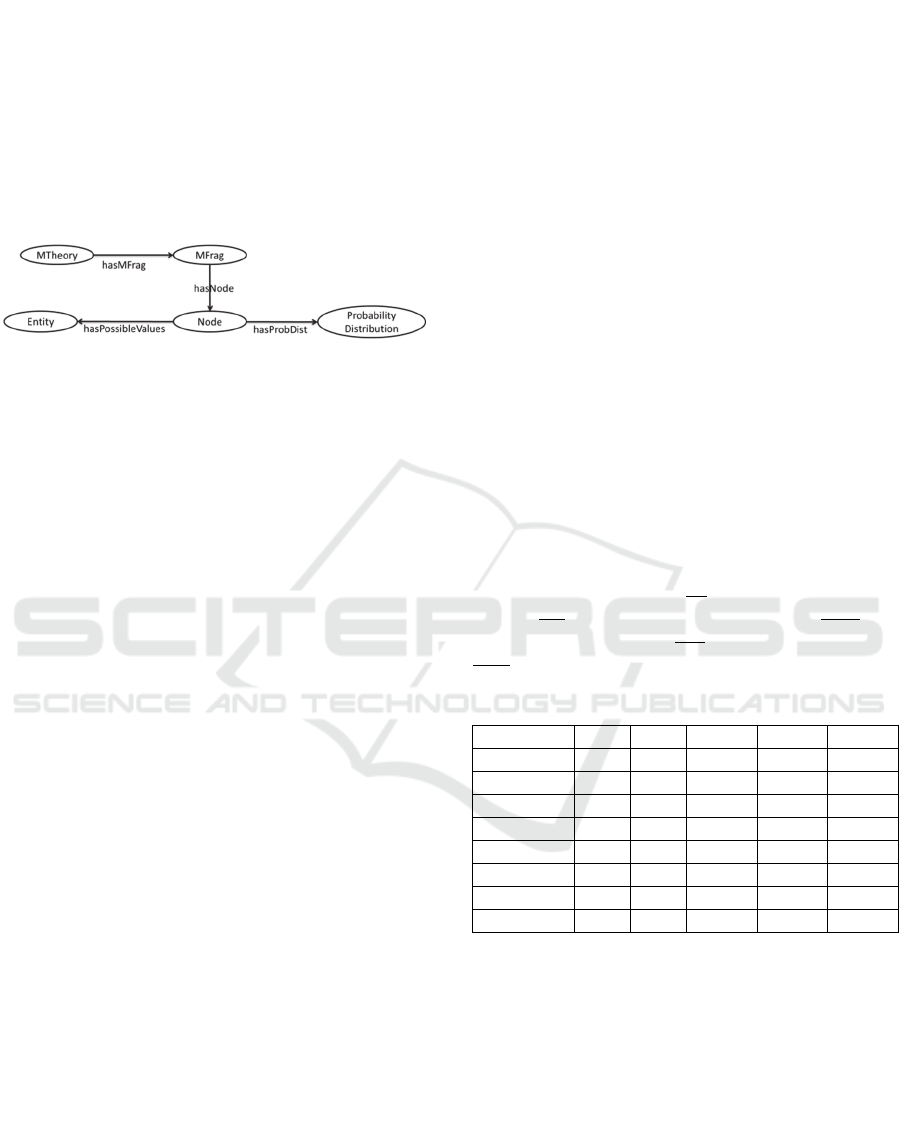
In Figure 1, the concepts of the upper ontology
are presented, where ellipses represent general
classes while arrows represent the main relations
between these classes. A probabilistic ontology must
have at least an individual's MTheory class, which is
formed by a group of MFrags that collectively form
a valid MTheory. In the next section, we discuss the
Multi-Entity Bayesian Network theory (Carvalho et
al., 2013).
Figure 1: PR-OWL Adapted from Costa (2005).
2.3 Multi-Entity Bayesian Network
Multi-Entity Bayesian Network (MEBN) represents
the world as composed of entities that have
attributes and which are associated with other
entities. Knowledge about the attributes of the
entities and their relationships are represented as a
collection of MEBN fragments (MFrags) organized
in MEBN theories (MTheories). An MFrag
represents a distribution of conditional probability
for instances of random variables about their parents
(parent node) in the same MFrag. An MEBN theory
is a set of MFrags that collectively satisfy
consistency constraints, ensuring the existence of a
single joint probability distribution on instances of
the random variables represented in each MFrag.
MEBN integrates the semantics of the standard
theoretical model of first-order logic with random
variables, as formalized in Bayesian Networks
(Howard; Stumptner, 2014).
Such as in a BN, one MFrag contains nodes that
represent random variables arranged in a directed
graph whose edges represent relations of direct
dependence. An isolated MFrag can be compared
with a standard BN with known values to their root
nodes and local distributions of its nodes that are not
root. A node in an MFrag may have a list of
arguments in parentheses. These arguments are
placeholders for the authorities in the field (Costa,
2005).
According to Laskey (2008), an MFrag consists
of three types of nodes: (i) the residing nodes (object
property in OWL-DL) have local distributions that
define how their probabilities depend on the values
of their parents in the graph. In a complete MEBN
theory, each resident node has exactly one MFrag
where their local distribution is set; (ii) the input and
context nodes can influence the distribution of the
resident nodes, but their distributions are set in their
own MFrags. Finally, (iii) context nodes represent
conditions that must be satisfied for the influences,
and local distributions of an MFrag can be applied.
These conditions are boolean values, which may
have true, false or absurd values.
An MEBN does not specify a standard for
Conditional Probability Table (CPT). However, as in
a default BN, a CPT summarizes statistical
regularities that characterize a domain. These
regularities are captured and coded in a knowledge
base using a combination of expert opinions and/or
learning from observation. For more information
about MEBN and PR-OWL, we suggest reading the
following works (Laskey, 2008) (Costa, 2005)
(Carvalho et al., 2013).
Most projects focused on Ambient Assisted
Living or, more specifically in Smart Homes (SH)
are interested in proposing models to provide
services. A reactive requirement drives the execution
of services, always after a fact has occurred.
Therefore, they do not show proactive behaviour to
adapt to the user environment. Related works are the
ones shown in Table 2: Soprano (Sixsmith et al.,
2009), Persona (Tazari et al., 2010), SM4ALL
(Rasch et al., 2011), Uranus (Coronato, 2012),
CoCaMAAL (Forkan et al., 2015).
Table 2: Related Work.
Per Sop SM4 Ura CoC
AAL X X X X X
SH X X X
Sensor X X X X X
Event X X X
Situation X X X X
Action X X X X
Activity X
Uncertainty
These works show a semantic context model, but it
is observed that these models have a reduced
expressiveness. Those who address the uncertainty
show a hybrid model to generate probability using
techniques without using Semantic Web
technologies. Therefore, it is important to develop a
model to support reasoning about uncertainty in the
AAL domain because none of the related work
addresses these characteristics, fully supported by
Semantic Web technologies, to sensitive systems on
the Situation-Awareness in Smart Environments.
Reasoning on Uncertainty in Smart Environments
243

3 DEALING WITH
UNCERTAINTY IN SMART
ENVIRONMENTS
Systems for smart environments need to know the
user environment, and where necessary, implement
assistance actions. Currently, the main source for
real-time data collection is data obtained from
sensors. They collect raw data without semantic
characterization and with error rates adding
uncertainty in the collected data. Therefore, it
becomes necessary to consider this data associated
with data from other entities such as people, rooms’
characteristics, and electrical networks state, among
others. It is possible to group data to generate useful
information from a higher level, i.e., detecting of an
environmental or user situation, as cold or
emergency. In this paper, the vision of the
environment perceived by the system is obtained
from the data captured by the sensors; these inputs
are aggregated with environmental contextual
entities generating useful information. The actions
triggered by the system for the environment are
realized by Web services, which are associated with
objects like smart phones, televisions, microwaves
ovens, and others in the living environment. In
Figure 2, is presented the information and decision
flow.
Figure 2: Adapted from Machado et. al, 2013.
The system starts collecting raw data from sensors
and aggregates the information associated with those
entities to generate higher-level information that is
used to characterize the state (situation) of the
environment. With this characterization, the system
can do a decision to act in the environment using the
capabilities (services) provided by the available web
services automating the environment according to
the situations of interest and user preferences.
3.1 Ontology Network for AAL
Other works on situation-awareness for smart
environments are directed to modeling concepts that
relate to the situation itself, paying little or no
attention to the modeling of other concepts of an
intelligent environment. In this article, we try to
approximate the home automation model (essentially
describes semantic relations between the structure of
the physical environment) with the user model and
higher-level information such as events, situations
and actions.
The ontology network for AAL was described
using Web Ontology Language using the Protégé
software. The probabilistic fragments that make up
the Reference Model for Systems to Predictive
Situations-awareness in AAL was developed using
UnBBayes software. Intra networks relations were
established with OWL-DL owl:subclass and
owl:import resource and other relationships were
implemented using DOOR ontology (Allocca;
D'Aquin, 2009).
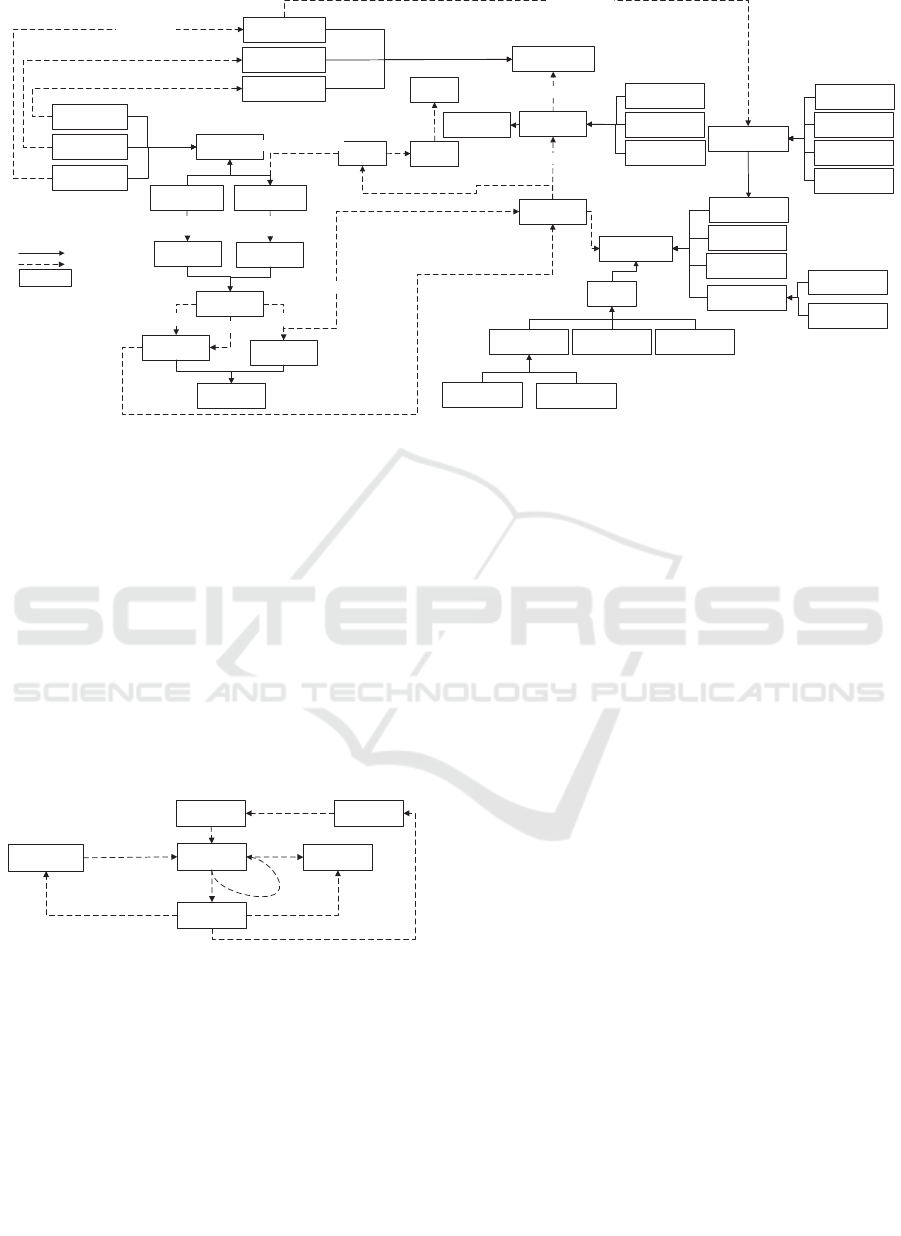
A simplified form of each modelled network is
presented in Figure 3; however, for easy viewing
some entities and their relationships were omitted.
This structure may be modified to incorporate new
concepts, allowing the inclusion of new entities in
different domains. The objective is to construct a
model that describes an automated home
environment, fully controlled by a middleware to
support a home care environment.
Analysing Figure 3, the user performs Actions
(Human Action). These result in External Events
collected by the system. Events start and finish the
Current Situation involving the user in the current
time. The same events influence a Predictive
situation that may involve the User in the future.
Using the information about Current and
Predictive Situation, the system can select
Automated Actions to handle situations of interest.
For example, if is necessary to handle the situation
including the interaction with a User, the system
should choose an Automated Action Type Regarding
Person.
This action will be performed by a functionality
provided by a device of the type Interaction with
Person. This functionality must be sensitive to the
disability presented by the User. The Automated
Actions produce Internal Events and analysing these,
the system can detect if the Current and Future
Situation change or will change in relation to a User.
ICEIS 2016 - 18th International Conference on Enterprise Information Systems
244
ACTION
AUTOMATED
ACTION
HUMANAC TIO N
INTERNAL
EVENT
EXTERNAL
EVENT
EVENT
CURR EN T
SITUATION
PREDICTIVE
SITUATION
SITUATION
generate
generate
start
end
influence
USER
DEVICE
USER_PROFILE
FUNC TIONALITY
INTERACTION
WITHPERSON
INT ERACTIONWITH
ITSELF
INTERACTIONWITH
ORGANIZATION
REGARDINGA
ORGANIZ ATION
REGARDINGA
PERSON
REGARDINGA
ITSELF
executedBy
executedBy
executedBy
hasProfile
isSensitiveTo
isSituationOf
willBeSituationOf
HEAL TH
CAPACITY
PREFERENCES
ROLE
SPECIALITY
VISUA L
HEAR ING
MOTOR
COGNITIVE
DESABILI TY
VISITANTCAREGIVER PATIENT
FORMAL
INFORMAL
HEAL TH
CONDITION S
HEAL TH PROVIDER
STATE
useDevice
ACTIVITY
TASK
GOAL
hasTask
hasFunctionality
APPLIANCE
ACTUATOR
SENSOR
isComposedBy
ObjectProperty
subConceptOf
Concept
Figure 3: Ontology Network for AAL Environments.
3.2 Reference Model for Predictive
Situations in Smart Environments
Represent uncertainty in ontologies is not the same
as to build a probabilistic system. In this particular
case, the probabilistic part refers to the semantic
relationships modelled using the PR-OWL settings
that collectively form a MEBN theory. There is no
need for all the relations of an ontology to be
probabilistic, however the parts modelled with PR-
OWL extension should form a valid MEBN theory.
The semantic relationships that extend PR-OWL
resources are shown in Figure 4.
TASK USER
hasTask(us,tar)
EVENT
PREDICTIVE
SITUAT ION
influence(ps,t)
willBeSituationOf(ps,t,us)
AUTOMATE D
ACTION
hasReactiveAction(ps,aa)
OWL‐TIME
influence(ps,tPrev)
runningTask(tas)
automatedAction
Perfomed(ps)
Figure 4: Probabilistic Ontology for proactive domain.
In this figure the probabilistic ontology for
predictive situations is represented graphically. In
this probabilistic ontology, the semantic relationship
contains parameters derived from entity instances of
ontology. The definition of the semantic relationship
with parameters is inherited from the PR-OWL
model. In this case, the instances of entities are
random variables that will feed the reference model
to Predictive Situation and form a valid theory. In
this probabilistic ontology, events are affected when
the user is involved by some Task running
(runningTask(tar)) and/or Automated Actions taken
in relation to Predictive situation
(AutomatedActionPerformed (ps)).
The recursion for the model is promoted by the
Temporal Entity defined in OWL-TIME ontology
(Hobbs et al., 2004). This concept can be used as a
discrete concept, so representing subsequent steps
orderable of "T0" to "Tn" rather than continuous
scales. Therefore, an event can influence a predictive
situation at an earlier time by the relationship
influence(ps, tPrev) and influence a predictive
situation at time t. The willBeSituationOf(ps, t, us)
gives the probability of a Predictive situation ps on a
time t involving user us. Therefore, it can perform
prediction of a situation over time.
So the question that the probability part of the
ontology must answer is: “what is the probability of
a situation at a specific time, involving the User in
his living environment?”
In the Figure 4 is show the MBEN theory of
reference for predictive situation-aware systems.
The systems using this model can answer the
question by resident node willBeSituationOf(ps, t,
us). This reference model is a repeatable structure
(template) that generates Bayesian Networks
according to user situation. The Specific Situation
Bayesian Networks are generated according to the
semantic relationships that are linked to the user's
instance within the ontology. Therefore, at runtime,
when exists a need to generate a Bayesian network,
the structure of the network is dynamically
generated according to the reference model and the
Reasoning on Uncertainty in Smart Environments
245

user context that are represented in the ontology.
The model is composed of fragments, described
below, and the random variables related to the
context nodes are: "tar" to task, "us" to User, "aa"
for Automated Action, "ev" for Event, "ps" for
Predictive Situation and "tPrev" and "t" for
orderable Discrete Times (instances of OWL-
TIME), the resident nodes will be described as
<resident node name> = {states}.
The Task MFrag present the probability of a
specific task to be in execution in the environment,
and this fact is represented by runningTask(tas) =
{True, False} resident node. The Automated Action
MFrag presents the probability of an automated
action to be executed in relation to a predictive
situation, and this fact is represented by
automatedActionPerformed(ps) = {Automated
Action} resident node. The TaskUser MFrag
describes, through the resident node
hasTask(us,tas)={True, False}, the probability of a
user be involved by a task. The Predictive Situation
MFrag generates the local probability distribution of
a particular predictive situation involving a user at a
specific time by the resident node
willBeSituationOf(ps, t, us) = {True, False}. Such
distribution is calculated through of the influence of
the resident node influence (ps, t)={events}, whereas
the states of resident node influence must be
instances of events. So this way is possible to
calculate the probability of a particular event
happens when being influenced by task and
automated action. This context node applies the
probability distribution that an Event influences a
predictive situation in time t, when affected after by
the input nodes runningTask(tas),
automatedActionPerformed(ps) and its own
distribution in a previous time influence(ps, tPrev).
This reference model is a repeatable structure
that instantiates specific Bayesian Network
according to existing evidence. The reasoning
process on the Reference Model for Predictive
situations is intended to the generation (queries) of
Specific Situation Bayesian Network (SSBN).
Determining the values (probability) of a set of
queries the systems can query the probability of a
situation will be situation of a User at a specific time
in the future. Thus, the system has the possibility to
choose what proactive actions to be triggered in
relation to the probability values generated by virtue
of a query generated of the Specific Situation
Bayesian Network.
4 CASE STUDY
A scenario is the complete description of a
contextualized user’s routine. This case study is
based in a scenario that demonstrates how the
probabilistic model developed in this article is
applied in smart environments. To analyze the
model, it was used a Pervasive Application and a
prototype of Situation as a Service (SIaaS)
middleware described in Machado et, al. 2014.
Thus, the scenario described is typical of an
Ambient Assisted Living environment, consisting of
an unwanted situation. Different aspects of user’s
interaction with the object’s residence are identified
to generate events that can determine the beginning,
the end or influence the rise of unwanted situations.
These features result in the execution of proactive
actions to handle this situation. The scenario is
intended to generate data for the detection of
unwanted situations and actions performed to deal
with these situations, and the events generated
(effects of these actions).
Imagine John’s, a 75 years old citizen who has
some aging associated diseases such as diabetes,
hypertension and lightweight dementia. John's
residence consists of a living room and kitchen,
among other space. This type of patient tends to
forget in what activity is immersed, it is common to
start an activity and forget that he was doing
another, for example, cooking and watching
television, or even confuse the time of day and go to
sleep. Therefore, the family of John buys a
Pervasive Application to assist John in daily
activities. The focus of this scenario is the activity of
cooking, where John interacts with the stove device
(task use stove). According Blasco et al. (2014)
older people are a group with highest vulnerability
to accidents, especially in their homes. The vast
majority of domestic accidents are related to
activities in the kitchen: kitchen utensils, cutlery and
appliances are the most dangerous utensils. As a
result of these accidents, older people lose
confidence in their abilities, lowering their self-
esteem and, consequently, in many cases, deciding
to live in a nursing home.
Therefore, to avoid such features, in John's
kitchen was installed a smart stove with the
following features: (i) identify which user used / are
using the stove, by detection of digital; only after
this step the stove frees up resources, e.g. turning on
the stove; and (ii) which was the last time (time) in
which a person neared the stove, or even (iii) the
functionality to automatically turn off the stove.
Therefore, imagine that John is watching
ICEIS 2016 - 18th International Conference on Enterprise Information Systems
246
television in the living room, but moves to the
kitchen and decide to cook. John organizes the
preparations, he turns on and put a pot on the stove
and, after it, he listen news on TV that is of his
interest. So, he comes out of the kitchen and back
into the living room, sitting on sofa in front of the
television. An application that seeks to assist users
affected by the state of Senile in their daily activities
should interfere in everyday life as little as possible.
Therefore, in this scenario, the application has
interest in being notified if John forgot the stove
turned on, so putting him and his family in an
unwanted situation as a dangerous situation in
cooking when using the stove. So, the application
can make decision for trigger proactive actions and
to manipulate the unwanted situations. Table 3
presents the actions and events produced by the
scenario.
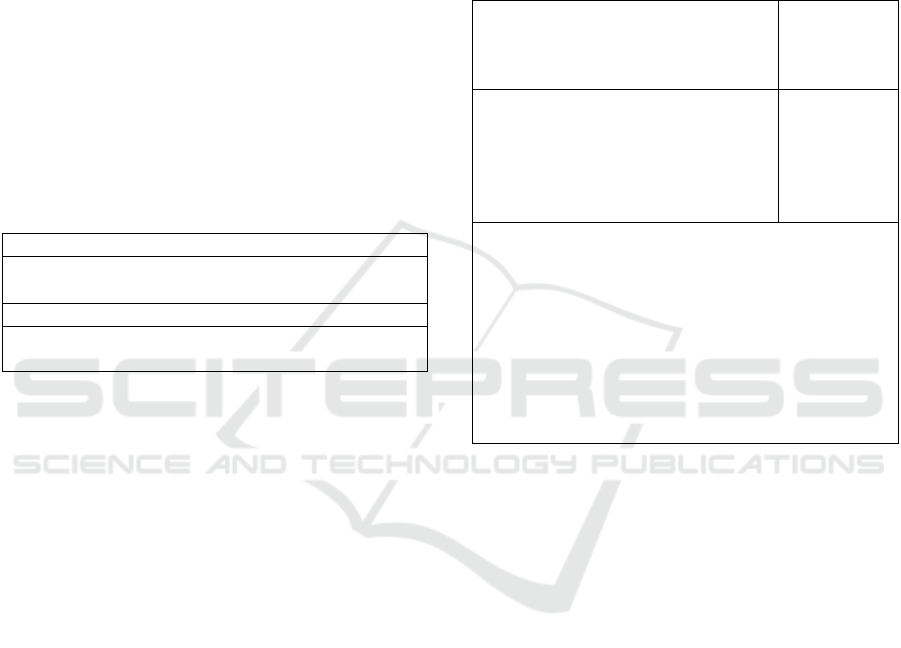
Table 3: Actions of appPervCook.
Actions
ac1: Warn User; ac2: Notify Caregiver that stove is turned on;
ac3: Turn off the stove automatically
Events
ev1: User forgot stove on; ev2: Stove off;
ev2.1: Sensor detected presence near to the stove
The ev1 event starts the unwanted situation, and the
ev2 and ev2.1 events finish the situation. The actions
can be used with a reactive or a proactive way. To
handle this situation, a reactive behaviour of the
application could be making decision to turn off the
stove automatically or alert the caregiver to perform
this action or wait more time. For a proactive
behaviour, the application could have the ability to
predict whether John, when turn on the stove, he will
forget this on. This characteristic is promoted by the
Reference Model for Predictive situation-aware
system. The local probabilistic distribution for each
MEBN fragment must be generated with the help of
an expert in Senile (in a real scenario), or by
machine learning. This model can be started with
historical data of people affected by this disease, or
even after John turned on the stove a few times.
Thus, making it possible to identify a behavioral
pattern and identify the probability of John forget
the stove on while using it. In the fictitious scenario,
if John turn on the stove, there is possibility of forget
it on. In Table 4, is presented the distribution for
each fragment MEBN.
The resident node runningTask(tas), describes
the probability that there is a running task in the
environment. For this node, the article used values
that do not affect other nodes residents (50% true
and 50% false). The node hasTask(us, tas)
establishes that 92% of the time there running task
the user is involved. The resident node
automatedActionPerformed(ps) shows that directly
warn John (ac1) was executed 15% of the time.
Notify the caregiver (ac2) by 50% and automatically
turn off the stove (ac3) by 35%.
Table 4: Local probability distribution for resident nodes
of appPervCook.
R
esident: automatedActionPerformed(ps)
[ac1=0.15, ac2=0.5, ac3=0.35]
R
esident:
runningTask(tas)
[true=0.5,
false=0.5]
R
esident: willBeSituationOf (ps,t)
If any ps has (influence = ev1) [true=0.99,
false=0.01] else If any ps has (influence = ev2)
[true=0.01, false=0.99] If any ps has (influence
=ev21)
[true=0.45,false=0.55]else[true=0.5,false=0.5]
R
esident:
hasTask (us,tas)
[true=0.92,
false=0.08]
Resident: influence (ps,t)
If any ps has (automatedActionPerformed = ac1) If any tas has
(runningTask = false) [ev1=0.05, ev2=0.35, ev21=0.6] else
[ev1=0.75, ev2=0.05, ev21=0.2] ]else If any ps has
(automatedActionPerformed = ac2) If any tas has (runningTask
= false) [ev1=0.02, ev2=0.38, ev21=0.6] else [ev1=0.45,
ev2=0.05, ev21=0.5] ]else If any ps has
(automatedActionPerformed = ac3) If any tas has (runningTask
= false) [ev1=0, ev2=1, ev21=0] else [ev1=0, ev2=1, ev21=0]
]else [ev1=0.34, ev2=0.33 ev21=0.33]
The local distribution to the resident node
influence(ps, t) describes how Automatically
Executed Actions and Running Task influenced the
establishment (arise) of the Events “forgot stove
turned on (ev1)", "Stove turned off (v2)" and "
Sensor detected presence near to the stove (ev2.1) ".
Therefore, if: (a) John is warned (ac1) and the
task is not running, John forgets the stove turned in
5% of cases, do not forget 35% and there is presence
near to the stove 60%. If the task is running, John
forgets stove turned in 75%, does not forget 5% and
there is presence near to the stove 20%; (b)
Caregiver notified (ac2) and there is no running task,
John forgets the stove turned on 2% of time, do not
forget 38% and there is presence near to the stove
60%; If running task, he forgets in 45% of time, do
not forget to 5% and presence by 50%; (c) Stove
turned off automatically (ac3), in 100% of cases, the
stove turned off (v2) and, for a default distribution,
are distributed on average 33.33% for all events.
The resident node influence(ps, t) applies your
local distribution probability into
willBeSituationOf(ps, t, us) node at time t, so if John
forgot the stove (ev1), then 99% cases the dangerous
Reasoning on Uncertainty in Smart Environments
247
situation is valid and only 1% false. If John turned
off the stove (v2), then there is 99% chance of
dangerous situations does not exist and, if it was
detected presence near stove (ev2.1), then there is a
dangerous situation in 45% of time. Thus
demonstrating that even if someone neared the stove
(checking or not the cooking activity), there is a
probability of danger.
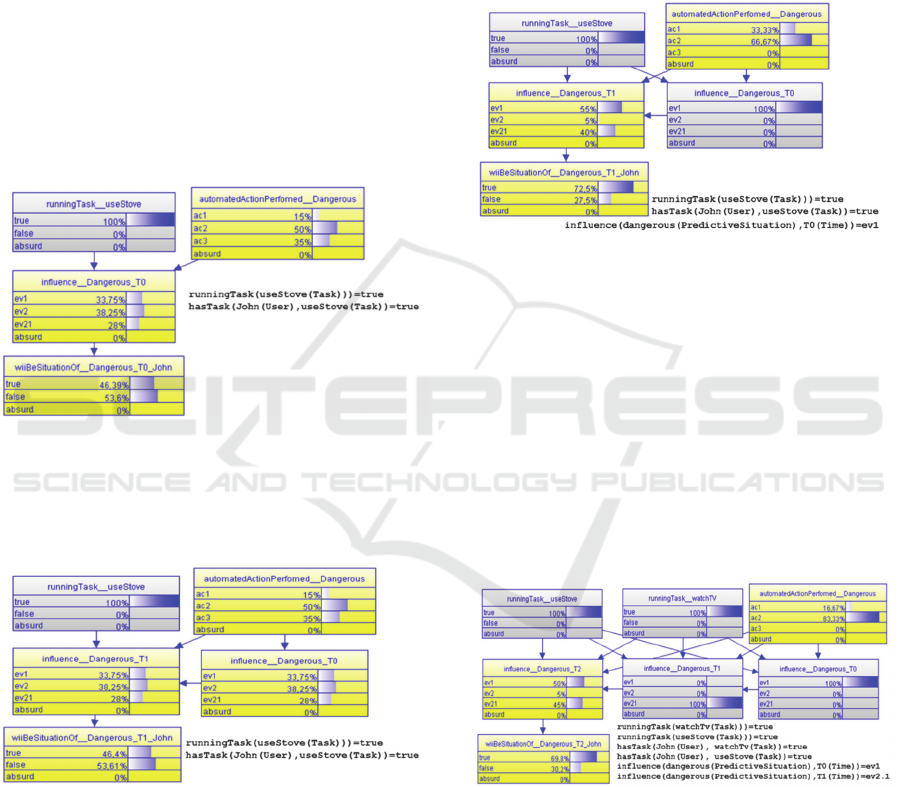
Using the structure of the reference model
defined in Section 3.1 and local probability
distributions given in Table 4, the system can
generates the Specific Situation Bayesian Network
for the scenario as following. Figure 5 presents the
SSBN not recursive (only T0 time). It was adding
the evidences that John is using the smart stove and
the dangerous situations will be situation of John at
T0 on 46,39% of chance.
Figure 5: SSBN at T0 and John using Stove.
In Figure 6, it was added the T1 time (ontology
instance). Therefore, it was possible to determinate
that John will be involved by Dangerous Situation at
T1 with 46,4%.
Figure 6: SSBN from T0 to T1 and John using Stove.
The difference between the last net and it was
0.01%, but if it is relevant, depends on the
interpretation of an expert on the detected situation.
In Figure 7 is presented that there is an evidence
that John, at T0, forgot the stove turned off (ev1), so
in T1 there is a probability of 72,5% of chance that a
Dangerous Situation will be the situation of John in
T1.
In Figure 8 it was used more evidences. Thus,
the network was used to answer the following query:
"What is the probability that John to be in a
dangerous situation in T2?". In the Figure, is
presented the SSBN with the evidences (axioms
when applied in SSBN result in gray nodes)
provided by the scenario. Therefore, the current time
is T1, John is involved by tasks watching tv and use
stove, these tasks comprise the cooking activity.
Figure 7: SSBN from T0 to T1, John using Stove and Ev1
detected at T0.
The local probability distribution of the Table 4
describe that John is involved by some task, it is a
positive influence to dangerous situation. There is
evidence that John at T0 (previous time) forgot the
stove on (ev1 = 100%) and the current time (T1)
already was detected presence of some people near
the stove (ev21 = 100%). With these evidences, the
system has the intention to know if in T2 John will
be involved by a Dangerous Situation. According to
figure 8, there is 69,8% of chance that John is in
Dangerous Situation in T2.
Figure 8: SSBN with the evidences.
5 CONCLUSIONS
Systems for intelligent environments may become
proactive when technologies support the reasoning
over uncertainty in runtime. Multi-Entity Bayesian
Network made these characteristics possible through
of the generation of Specific Situation Bayesian
ICEIS 2016 - 18th International Conference on Enterprise Information Systems
248

Network. This paper presented the Reference Model
for Predictive Situation-Awareness for give dynamic
support in relation to reasoning over uncertainty for
detection unwanted situation with Multi-Entity
Bayesian Network Theory. This model provides
essential support for the prediction of situations in
real environments. The reference model enables the
Bayesian network structures as well as the
probability values for predictions are generated at
runtime. Therefore, the SSBN are generates on the
moment that the user is living in their residence.
Ordinary Bayesian Network are not dynamic this
way, because need of an expert to model their
structures.
The contributions of this paper include the use
of Semantic Web Technologies for reasoning about
uncertainty, as well as the reference model for
predicting unwanted situations. Further work is the
identification of a top ontology to increase the
coverage context model and using the reference
model for different scenarios.
REFERENCES
Allocca, C, D'Aquin, M. 2009. Door: Towards a
formalization of ontology relations. In. International
Conference on Knowledge and Ontology
Development, 2009. Proceedings of the International
Conference on Knowleadge and Ontology
Development. Madera: [s.n.], p. 13-20.
Bettini, C., Brdiczkab, O., Henricksen, K., Iindulzkad, J.,
Nicklase, D., Ranganathanf, A., Rriboni, D. 2010. A
survey of Context Modelling and Reasoning
Techniques. Pervasive and Mobile Computing, 6(2), p.
161-180.
Blasco, R., Marco, Á., Casas, R., Cirujano, D., Picking, R.
2014. A smart kitchen for ambient assisted living.
Sensors, v. 14, n. 1, p. 1629-1653.
Carvalho, R.; Laskey, K.; Costa, P. C. 2013. PR-OWL
2.0–bridging the gap to OWL semantics.
In: Uncertainty Reasoning for the Semantic Web II.
Springer Berlin Heidelberg, p. 1-18.
Coronato, A. 2012. Uranus: A middleware architecture for
dependable AAL and vital signs monitoring
applications. Sensors, v. 12, n. 3, p. 3145-3161.
Coronato, A., De Pietro, G. 2013. Situation awareness in
applications of ambient assisted living for cognitive
impaired people. Mobile Networks and Applications,
v. 18, n. 3, p. 444-453.
Costa, P. C. G., Carvalho, R. N., Laskey, K. B., Park, C.
2011. Evaluating uncertainty representation and
reasoning in HLF systems. In: Information Fusion
(FUSION), 2011 Proceedings of the 14th
International Conference on. IEEE. p. 1-8.
Costa, P. C. 2005. Bayesian semantics for the Semantic
Web. George Mason University Departament of
Systems Engineering and Operations Research,
George Mason University: Fairfax, VA, USA. p. 312.
Dey A, Abowd G. 1999. The context toolkit: Aiding the
development of context-enabled applications. In: Proc.
of the SIGCHI conference on Human factors in
compu-ting systems, Pittsburgh, Pennsylvania, US, pp.
434–441.
Fenz, S., 2012. An ontology-based approach for
constructing Bayesian networks. Data & Knowledge
Engineering, v. 73, p. 73-88.
Forkan, A. R. M., Khalil, I., Tari, Z., Foufou, S., Bouras,
A., 2015. A context-aware approach for long-term
behavioural change detection and abnormality
prediction in ambient assisted living. Pattern
Recognition, v. 48, n. 3, p. 628-641.
Friedman, N., Geiger, D., Goldszmidt, M., 1997. Bayesian
network classifiers. Machine learning, v. 29, n. 2-3, p.
131-163.
Hobbs, J. R., Pan, F., 2004. An ontology of time for the
semantic web.ACM Transactions on Asian Language
Information Processing (TALIP), v. 3, n. 1, p. 66-85.
Howard, C; Stumptner, M., 2014. A Survey of Directed
Entity-Relation--Based First-Order Probabilistic
Languages. ACM Computing Surveys (CSUR), v. 47,
n. 1, p. 4.
Laskey, K., 2008. MEBN: A language for first-order
Bayesian knowledge bases. Artificial intelligence, v.
172, n. 2, p. 140-178.
Machado, A., Pernas, A. M., Augustin, I., Thom, L. H.,
Krug, L., Palazzo, J., Oliveira, M. De, 2013. Situation
awareness as a Key for Proactive Actions in Ambient
Assisted Living. In: Proc. of the 15th International
Conference on Enterprise Information, p. 418–426.
Machado, A., Lichtnow, D., Pernas, A. M., Wives, L. K.,
de Oliveira, J. P. M. 2014. A Reactive and Proactive
Approach for Ambient Intelligence. International
Conference on Enterprise Information System, p. 501-
512.
Paganelli, F., Giuli, D., 2011. An ontology-based system
for context-aware and configurable services to support
home-based continuous care. In. Journal of the IEEE
Transaction Information Technology Biomedical, v.
15, n. 2, p. 324-333.
Rasch, K., Li, F., Sehic, S., Ayani, R., Dustdar, S., 2011.
Context driven personalized service discovery in
pervasive environments. World Wide Web, v. 14, n. 4,
p. 295-319, springer, Netherlands.
Sixsmith, A., Meuller, S., Lull, F., Klein, M., Bierhoff, I.,
Delaney, S., Savage, R., 2009. SOPRANO: An
Ambient Assisted Living System for Supporting Older
People at Home. In: Lecture Notes in Computer
Science. Springer Berlin: Heidelberg, vol. 5597, p.
233–236.
Strang, T., Linnhoff-Popien, C., 2004. A Context
Modeling Survey. In: Workshop on Advanced Context
Modeling, Reasoning and Management, UbiComp
2004 - The Sixth International Conference on
Ubiquitous Computing, Nottingham, England.
Tazari, M. R., Furfari, F., Ramos, J. P. L., Ferro, E, 2010.
The PERSONA service platform for AAL spaces.
Reasoning on Uncertainty in Smart Environments
249

In: Handbook of Ambient Intelligence and Smart
Environments. Springer US. p. 1171-1199.
Yang, Y., Calmet, J., 2005. Ontobayes: An ontology-
driven uncertainty model. In: Computational
Intelligence for Modelling, Control and Automation,
2005 and International Conference on Intelligent
Agents, Web Technologies and Internet Commerce,
International Conference on. IEEE, p. 457-463.
Ye J, Stevenson G, Dobson S., 2011. A top-level ontology
for smart environments. In: Pervasive and Mobile
Computing. vol. 7, no. 3, p. 359-378.
ICEIS 2016 - 18th International Conference on Enterprise Information Systems
250
