
Subgraph Isomorphism Search in Massive Graph Databases
Chemseddine Nabti
1,2
and Hamida Seba
1,2
1
Universit´e de Lyon, CNRS, Lyon, France
2
Universit´e Lyon 1, LIRIS, UMR5205, F-69622 Villeurbanne Cedex, France
Keywords:
Subgraph Isomorphism, Graph Query, Massive Graph Databases, Graph Summarizing, Modular Decomposi-
tion.
Abstract:
Subgraph isomorphism search is a basic task in querying graph data. It consists to find all embeddings of a
query graph in a data graph. It is encountered in many real world applications that require the management
of structural data such as bioinformatics and chemistry. However, Subgraph isomorphism search is an NP-
complete problem which is prohibitively expensive in both memory and time in massive graph databases. To
tackle this problem, we propose a new approach based on concepts widely different from existing works. Our
approach relies on a summarized representation of the graph database that minimizes both the amount space
required to store data graphs and the processing time of querying them. Experimental results show that our
approach performs well compared to the most efficient approach of the literature.
1 INTRODUCTION
Graphs are naturally used to represent data in several
domains and applications such as protein interactions,
regions of images, 2D and 3D shape recognition, etc.
Graphs are also a first class solution for massive data
representation. In fact, graph databases enable us to
build interesting models that map closely to the prob-
lem domain. In this context, querying graphs is a fun-
damental problem studied by a large research com-
munity. Subgraph isomorphism search is the basic
type of graph queries. Given a query graph Q and
a data graph G, the subgraph isomorphism problem is
to find all embeddings of Q in G. However, this prob-
lem is NP-complete (Garey and Johnson, 1979) and
the problem of finding practical solutions for mas-
sive graph databases is a challenge. Subgraph iso-
morphism knows a lot of works that consist in finding
the best way to match a query graph with the data
graphs. We review here the main existing algorithms.
For an exhaustive and detailed list of solutions, sev-
eral surveys are available on the topic such as (Lee
et al., 2013) and (Gallagher, 2006). Existing solutions
are generally classified into two main categories:
1. Exact Approaches: in this case, we are interested
by returning the list of subgraphs of G that match
exactly the query Q.
2. Inexact or error-tolerant approaches: in this case,
we are interested by a ranked list of of subgraphs
of G that are most similar to the query Q.
In both approaches, algorithms may be optimal or ap-
proximate. Optimal algorithms return a correct and
complete solution but have, generally, an exponen-
tial time complexity. Approximate algorithms may
not find the correct/complete solution but guarantee a
polynomial time complexity.
The inexact approach knows a flourishing re-
search activity in several application domains such
as databases and pattern recognition relying on dif-
ferent tools such as genetic algorithms (Khoo and
Suganthan, 2001), neural networks (Micheli, 2009),
etc. Within this approach, we generally compute a
distance between the graphs. This distance reflects
the degree of similarity or dissimilarity of the graphs.
We focus here on exact subgraph isomorphism search
where existing algorithms can be classified within 3
categories:
1. Backtracking-based algorithms such as Ullman’s
(Ullmann, 1976), VF2 (Cordella et al., 2004),
QuickSI (Shang et al., 2008), GraphQL (He and
Singh, 2008), GADDI (Zhang et al., 2009), and
SPath (Zhao and Han, 2010). This approach con-
structs a space search tree whose internal nodes
correspond to partial solutions and leaves corre-
spond to embeddings. The first exact subgraph
isomorphism algorithm is due to Ullman (Ull-
mann, 1976). Ullmann’s basic approach is to enu-
merate all possible mappings of vertices between
204
Nabti, C. and Seba, H.
Subgraph Isomorphism Search in Massive Graph Databases.
DOI: 10.5220/0005875002040213
In Proceedings of the International Conference on Internet of Things and Big Data (IoTBD 2016), pages 204-213
ISBN: 978-989-758-183-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All r ights reserved

the two graphs in a depth-first tree-search. Each
node at level i of the search-tree maps a vertex
of the query to a vertex of the data graph. Each
path from the root to leaf in the search-tree repre-
sents a complete mapping between the query and
a subgraph of the data graph. This search-space
increases exponentially with the size of the input
graphs, so all the solutions proposed in this ap-
proach are based on some pruning rules that pre-
vent developing non necessary paths.
2. Indexing-based algorithms such as Grep (Shasha
et al., 2002), gIndex (Yan et al., 2004), FG-Index
(Cheng et al., 2007), Tree+△ (Zhao et al., 2007),
gCode (Zou et al., 2008), SwiftIndex (Shang et al.,
2008), and C-Tree (He and Singh, 2006). In this
approach, indexes are used to minimize the num-
ber of candidate graphs in the database. Then, a
subgraph isomorphism search is launched on the
candidates.
3. Candidate Region selecting algorithms such as
Turbo
ISO
(Han et al., 2013). In this approach,
the idea is to target specified regions on the same
graph for subgraph isomorphism search. These
regions are selected according to the properties of
the query.
A candidate region for a query graph Q is a sub-
graph of the data graph G which may contain
embeddings of the query graph. So, performing
subgraph isomorphism search on all candidate re-
gions will ensure that all embeddings can be ob-
tained. However, minimizing the number of can-
didate regions and the size of each region is ob-
viously important for faster matching. The main
solution within this approach is called Turbo
ISO
(Han et al., 2013). In order to minimize the size of
each candidate region, the authors of (Han et al.,
2013) propose to :
(a) Rewrite the query Q into an equivalent NEC
(Neighborhood Equivalence Class) tree Q
′
. In
Q
′
each set of vertices that have the same label
and the same set of adjacent query vertices are
merged into one NEC vertex. So, a NEC vertex
is a compressed form of a set of vertices. Con-
sequently, using Q
′
instead of Q, will accelerate
the candidate region exploration process, since
the number of vertices is smaller.
(b) Construct candidate regions for the query Q in
the data graph G by constructing for each re-
gion a BFS search tree T
G
from the root node
u
′
s
of the NEC tree Q
′
so that each leaf is on the
shortest path from u
′
s
. Then, for the start ver-
tex v
s
of each target candidate region, identify
candidate data vertices for each query vertex by
simply performing depth-first search using T
G
and starting from v
s
.
Minimizing the number of regions comes through
a careful choice of the root of the NEC tree.
For this, Turbo
ISO
ranks every query vertex u by
Rank(u) =
freq(G,L(u))
deg(u)
, where freq(G,l) is the
number of data vertices in G that have label l, and
deg(u) means the degree of u. This ranking func-
tion favors lower frequencies and higher degrees
which will minimize the number of regions.
When exploring candidate regions, Turbo
ISO
also
minimizes the number of enumerated partial so-
lutions by ordering the NEC vertices by increas-
ing sizes. Thus, paths involving fewer vertices are
explored first, the space is pruned rapidly if no
isomorphism is possible. In (Han et al., 2013),
Turbo
ISO
is compared to the other approaches and
its superiority in processing queries is attested via
extensive experimentations.
Another solution that can be classified in this cat-
egory is STW proposed in (Sun et al., 2012). In
this solution, the authors propose a graph decom-
position into STwigs. An STwig is a two level tree
structure, q = (r,L), where r is the label of the root
node and L is the set of labels of its child nodes.
STwigs are non overlapping star structures, i.e.,
edge disjoint stars.
Given a query graph Q, (Sun et al., 2012) first
decomposes Q into a set of STwigs, then it uses
exploration to find matches to each STwig. Can-
didate region exploration concerns the graphs that
contain these STWings.
In this paper,we present a new approach for sub-
graph isomorphism search on large graphs. The pro-
posed approach is completely different from all the
previous approaches, and outperforms the most effi-
cient existing algorithm in our experimentation. The
main idea of the proposed approach is to enhance
both time and space requirements of subgraph iso-
morphism search on large graphs. This is achieved by
working on summarized graphs that are simpler and
smaller than the original graphs.
The rest of the paper is organized as follows: Sec-
tion 2 defines our notations and presents the compres-
sion algorithm used to summarize the graphs. Section
3 describes the proposed algorithm for subgraph iso-
morphism search on summarized graphs. Section 4
presents an experimental evaluation to show the ef-
fective performance of the proposed technique over
the existing solutions. Finally, Section 5 concludes
the paper with a summary of our work and its per-
spectives.
Subgraph Isomorphism Search in Massive Graph Databases
205
2 PRELIMINARIES
Basics. We consider data graphs defined as simple
vertex labeled graphs. Simple graphs are graphs with
no edges involving a single vertex. We rely on the
terminology used in (Basu and BBA, 2006; Fan et al.,
2010).
Definition 1. A data graph G is a 3-tuple G =
(V,E, ℓ ), where V is a set of nodes (also called ver-
tices), E ⊆ V × V is a set of edges connecting the
nodes, ℓ : V → Σ is a function labeling the nodes
where Σ is the sets of labels that can appear on the
nodes.
In this paper, the notation G = (V, E), with ℓ omit-
ted means that we actually do not need the labels of
the vertices but just their identifiers (i.e., indexes).
An undirected edge between vertices u and v is
denoted indifferently by (u, v) or (v, u). For each v ∈
V, d(v) denotes the degree of v, i.e., the number of
neighbors of v, where a neighbor is a vertex adjacent
to v. The label or set of labels of a vertex v is given by
ℓ(v).
The number of vertices of a graph is called the or-
der of the graph. The number of edges of a graph is
called the size of the graph. A graph that is contained
in another graph is called a subgraph and can be de-
fined as follows:
Definition 2. A graph G
1
= (V
1
,E
1
, f
V
1
) is a sub-
graph of a graph G
2
= (V
2
,E
2
, f
V
2
), denoted G
1
⊆ G
2
,
if V
1
⊆ V
2
, E
1
⊆ E
2
, f
V
1
(x) = f
V
2
(x) ∀x ∈ V
1
.
Graph isomorphism is defined as follows:
Definition 3. A graph G
1
= (V
1
,E
1
, f
V
1
) and a graph
G
2
= (V
2
,E
2
, f
V
2
) are said to be isomorphic, denoted
G
1
∼
=
G2, if there exists a bijective function h:V
1
→V
2
such that the following conditions are met:
1. ∀x ∈ V
1
: f
V
1
(x) = f
V
2
(h(x))
2. ∀(x, y) ∈ E
1
: (h(x),h(y)) ∈ E
2
3. ∀(h(x), h(y)) ∈ E
2
: (x,y) ∈ E
1
Given a query graph Q and a data graph G, the
subgraph isomorphism search of Q in G consists
to find all the subgraphs of G that are isomorphic to Q.
Graph Summarizing. Generally graph summarizing
methods designate graph compression methods that
aim to reduce the amount of storage space required
for storing a graph so that the processing of the graph
does not require its decompression. So, this sum-
maries must retain an amount of the graph properties
that are sufficient to the application. Actually, this
line of research is very new and knows little works.
We can cite for example (Chen et al., 2009) where
Table 1: Notation.
Symbol Description
G = (V,E, ℓ) undirected vertex labeled graph,
f is a labeling function
V(G) vertex set of the graph G
E(G) edge set of the graph G
G the complement of the graph G
d(v) degree of vertex v
G[X] the subgraph of G induced by the set
of vertices X
C (G) compressed graph of G
root(C(G)) root of the tree corresponding to C (G)
Father(x) the module that contains vertex (or module) x
Leaves(x) set of vertices contained in module x
ℓ(x) set of labels of vertex (or module) x
the authors propose to summarize a graph by group-
ing the vertices that have the same label into super-
vertices. In (Fan et al., 2012), the authors summarize
graphs in a manner that preserves a class of queries,
i.e., a query of this class returns the same result when
applied to a graph G and when applied to the com-
pression of G. They considered mainly reachability
queries. In this kind of queries, we are interested in
verifying if there is a path between two vertices within
the graph. In (Lagraa et al., 2014), the authors pro-
pose a similarity measure between two large graphs
based on a similarity measure between compressed
versions of these graphs. They use modular decom-
position (Gallai, 1967; M¨ohring, 1985a) to compress
the graphs. A triangle listing algorithm is also pro-
posed on graphs compressed by modular decomposi-
tion in (Lagraa and Seba, 2016). These two applica-
tions show that modular decomposition is a promising
compression method for graphs. A modular decom-
position of a graph consists to find within the graph all
the sets of vertices that share the same neighboring-
hood. These sets of vertices are called modules. In
our framework, we also rely on modular decomposi-
tion to compress graphs. Modular decomposition is
a graph representation method introduced by Gallai
(Gallai, 1967) to solve optimization problems. It was
also used to recognize some graph classes (M¨ohring,
1985a; M¨ohring, 1985b; Spinrad, 2003). For a survey
of applications of modular decomposition see (Gallai,
1967; M¨ohring, 1985a; Dahlhaus et al., 1997). The
basic concept of modular decomposition, used in the
compression process, is the notion of module defined
as follows:
Definition 4. A module of a graph G = (V,E) is a set
M ⊆ V of vertices where all vertices in M have the
same neighbors in V M.
A module M of G can take one of the following
types:
• Series: if G[M] is a clique (A clique is a set of
IoTBD 2016 - International Conference on Internet of Things and Big Data
206
vertices connected to each other).
• Parallel: if
G[M] is a clique.
• Neighborhood: Both, G[M] and
G[M] are con-
nected graphs.
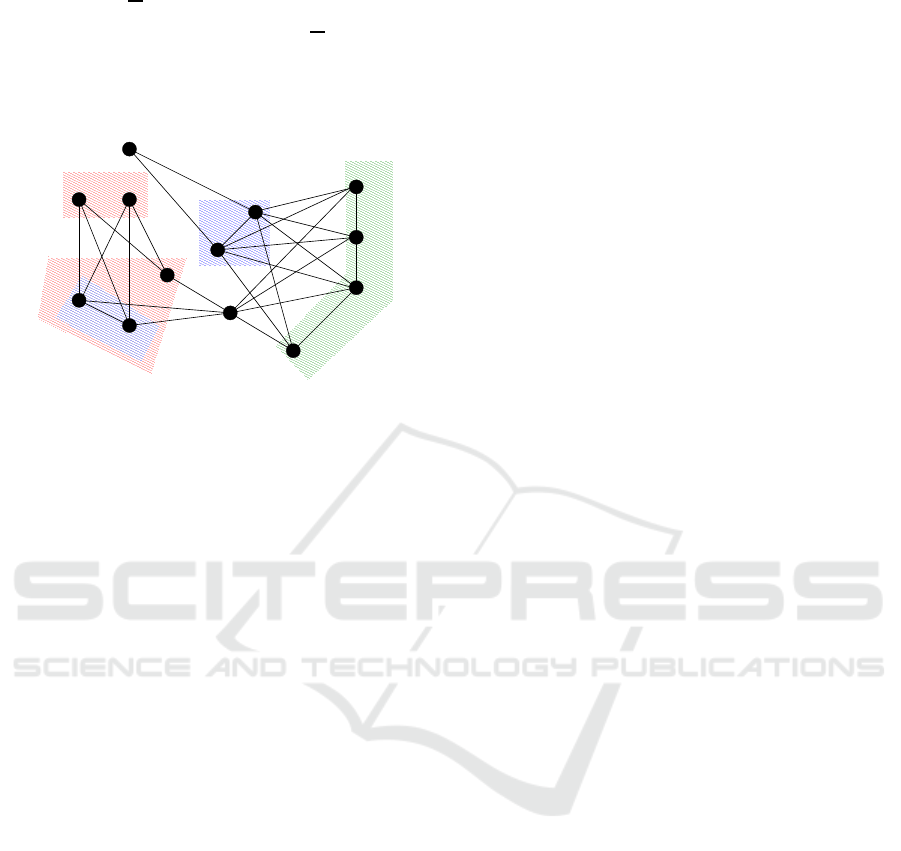
Figure 1 presents a graph and its modules.
a
b
c
d
e
f
g
h
i
j
k
l m
Figure 1: A Graph and its Modules (Lagraa et al., 2014).
The graph is compacted by replacing recursively
each module by a supervertex as illustrated in Fig-
ure 2. To obtain a unique representation of the graph
only the modules that do not overlap other modules
are considered.
To retain all the properties of the original graph
with the obtained compact representation of the
graph, adjacency information for neighborhood mod-
ules must be stored. Series and parallel modules need
no information about adjacency. For example, The
obtained compressed graph illustrated in Figure 2(e)
is itself a neighborhood module that can be denoted :
N(a, S(b,c),N(d,e, f, g),h,P(S(i, j), k),P(l, m)).
For this module, we retain the edges between the su-
pervertices to keep adjacency information. This gives
the final compressed graph. We also retain the edges
that bind the vertices of the neighborhood module
N(d,e, f, g).
We note also that each module is a tree whose
leaves are the vertices of the original graph as illus-
trated in Figure 3 for the modules of our example.
Given a vertex v, we denote by Father(v) the mod-
ule that contains it and by root(C (G) the module cor-
responding to the compressed graph. Given a mod-
ule m, Leaves(m) gives the leaves, i.e., vertices of the
module m. Also, we will use ℓ (x) to denote the set of
labels of a module or vertex x. Table 1 summarizes
our notations.
Modular decomposition has been the subject of
extensive research for years (Gallai, 1967; M¨ohring,
1985a; Dahlhaus et al., 1997; Habib and Paul, 2010;
Quaddoura and Mansour, 2010). Several algorithms
that compute the modular decomposition of a graph
are proposed in the literature (Habib et al., 2004). The
most efficient are linear time (Capelle et al., 2002;
Habib et al., 2004; Tedder et al., 2008) and achieve
in O(n+ m) .
3 SUM
ISO
: SUBGRAPH
ISOMORPHISM SEARCH ON
SUMMARIZED GRAPHS
As mentioned before, we propose here an algorithm
that finds all the embeddings of a query graph Q in
a data graph G. Both Q and G are compressed as
described in the previous section. We show that by
doing this we enhance both memory requirement for
storing the data graphs and the processing time of the
subgraph search. The algorithm, called Sum
ISO
, takes
in entry the compressed versions C (Q) and C (G) of
Q and G respectively and reports all the embeddings
of Q in G. The Algorithm operates in two phases: a
candidate supervertex selection phase and a subgraph
search phase. During the first phase, the compressed
data graph is parsed to retain only regions of the graph
that are likely to contain the query. This selection uses
only the labels of the modules. During the second
phase, a backtracking-like algorithm is used in each
region to verify the embedding. In the following we
detail both phases and show how we can find all the
embeddings by parsing the compressed graph data.
3.1 Candidate Supervertex Selection
The aim of this phase is to determine the modules (su-
pervertices) that are likely to match the query. With
this step, we minimize the number of vertices of the
data graph to be processed. For this, we explore the
vertices of C (G) to get all those that contain at least
one of the labels of the query. Let Cand denotes the
obtained result with:
Cand = {m ∈ C (G) such that ℓ(m) ∩ ℓ(C (Q)) 6= ∅}.
After that the set of candidate modules is parti-
tioned in several subsets where each of them is can-
didate for a single embedding. Each subset contains
the minimum number of modules that satisfy all the
labels of the query. Subgraph search is then invoked
on each of these subsets. Algorithm 1 details can-
didate supervertex selection. Figure 4 illustrates this
step on our example. In this Figure, we can see
that the query is compressed in a single supervertex
labeled S(P(b, c), a). ℓ(C (Q)) = {a,c,b}. Conse-
quently, Cand = {1,2}, where 1, and 2 are the identi-
fiers of the supervertices that are candidates to match
the query. The partitioning of Cand yields to the set
Subgraph Isomorphism Search in Massive Graph Databases
207

S(b,c)
a
d
e
f
g
h
i
j
k
l m
(a)
S(b,c)
a
N(d, e, f, g)
h
i
j
k
l m
(b)
S(b,c)
a
N(d, e, f, g)
h
i
j
k
P(l, m)
(c)
S(b,c)
a
N(d, e, f, g)
h
S(i, j)
k
P(l, m)
(d)
S(b,c)
a
N(d, e, f, g)
h
P(S(i,j), k)
P(l, m)
(e)
Figure 2: Compressing steps: S: series module. P: parallel module. N: neighborhood module (Lagraa et al., 2014).
P
S
h
a
i
j
k
g
e
c
f
N
l
b
d
S
P
m
Figure 3: Tree representation of Modules (Lagraa et al.,
2014).
{{1, 2}}. This means that there is only one possible
region of the graph to explore for subgraph isomor-
phism.
Note that at this step, we have a set of candidates
with no order. These candidates are selected solely
on labels. No structural verification are done with the
query. So, at the end of this step, we do not know if
there is a subgraph in G that matches the query. The
aim of the next step is to aggregate the candidate su-
pervertices in order to verify if the structure of the
query is preserved within them.
Algorithm 1: Supervertex Selection.
Data: A summarized data graph C (G) and a
summarized query C (Q).
Result: A set of candidate supervertices of C (G) that
match C (Q).
begin
Cand ←
/
0;
foreach m ∈ C (G) do
if ℓ(Q) ∩ ℓ(m) 6= ∅ then
Cand ← Cand ∪ {m};
end
end
C ← {s = {m
1
,m
2
,· ·· , m
j
}|ℓ(Q) ⊆ ℓ(s)};
foreach s ∈ C do
P ←
/
0;
SubgraphSearch(C (Q), s, P);
end
end
3.2 Subgraph Search
The subgraph search phase takes as inputs a query
C (Q) and a set s = {m
1
,m
2
,··· , m
j
} of modules that
are likely to contain an embedding of the query. It
returns all the embeddings of the query in these mod-
ules. An embedding is represented by a set P of pairs
IoTBD 2016 - International Conference on Internet of Things and Big Data
208

S(b,c)
a
N(d, e, f, g)
h
P(S(i,j), k)
P(l, m)
1
2
3
4
5
6
a
b
c
Query
S(P(b,c), a)
Compressed Query
Cand={1,2}
Compressed Data Graph
Figure 4: Example of Candidate Supervertex Selection.
(u,v), where u is a query vertex and v is the data ver-
tex that matches u. Algorithm 2 shows all the details
of this phase. For each vertex u in C (Q), Subgraph-
Search first finds the set of candidate vertices C
u
from
the vertices of the modules of the set s. A vertex v of
the data graph matches u if it has the same label as u
and all the neighbors of u are matched to neighbors
of v. This is verified by a call to function IsJoinable
(detailed in Algorithm 3). Given two vertices u ( from
the query) and v (from the data graph) to be matched,
function IsJoinable returns TRUE if the neighbors of
vertex u are matched to neighbors of vertex v in the
match P. To have the list of neighbors of a vertex in
a compressed graph, we use function Neighbors that
takes advantage from the tree structure of the com-
pressed graph (see Figure 3) to easily list the neigh-
bors of a vertex as detailed in Algorithm 4. Accord-
ing to the type (series, parallel or neighborhood) of
the module that contains the vertex we can easily de-
termine its neighbors. Algorithm 4 parses the subtree
of C (G) that contains u from the father of u upward
to the root of C (G). If a visited vertex x is a series
module, then all the leaves of its descendants that are
not in the branch that contains u are neighbors of u.
If the visited vertex is a neighborhood module, neigh-
bors of u are determined according to the edges of the
module.
When a match (u, v) is verified, in procedure
SubgraphSearch, it is reported in P. As in any
backtracking-based algorithm, SubgraphSearch uses
recursion to complete the partial match until it meets
the query. When a match fails, the procedure back-
tracks to the preceding state by removing the match.
4 EXPERIMENTAL RESULTS
We evaluate the execution time performance of our
algorithm, Sum
ISO
, over different type of graphs and
Algorithm 2: SubgraphSearch.
Data: A set of modules from the data graph
s = {m
1
,m
2
,· ·· , m
j
}, the compressed query
C (Q) and a partial embedding P.
Result: All embeddings of Q in s.
begin
if |P| = |V(C (Q))| then
Report P;
else
Choose a non matched vertex u from
Leaves(m),m ∈ C (Q);
C
u
← { non matched v ∈ Leaves(m
i
) such
that m
i
∈ s and ℓ(v) = ℓ(u) and
IsJoinable(u, v, P)};
foreach v ∈ C
u
do
P ← P∪ {(u,v)};
SubgraphSearch(C (Q), s, P);
Remove (u, v) from P ;
end
end
end
Algorithm 3: Verify that two vertices to be matched
have the same adjacency (IsJoinable).
Data: Two vertices u and v to be matched.
Result: True is the the vertices have the same
adjacency.
begin
return (∀u
′
∈ Neighbors(u), if u
′
is matched to
v
′
then v
′
∈ Neignbors(v));
end
size of queries. We also compared it with the most
efficient state of the art algorithm, called Turbo
ISO
and presented in (Han et al., 2013). We recall that
Turbo
ISO
is itself compared to the other existing solu-
tions in (Han et al., 2013) and showed to be superior
to them.
We first describe the datasets used in the experi-
ments, then we present our results.
Subgraph Isomorphism Search in Massive Graph Databases
209
Algorithm 4: Computing the set of neighbors of a ver-
tex in a compressed graph (Neighbors).
Data: A vertex u and a compressed graph C (G).
Result: The set of neighbors of u in G.
begin
N ←
/
0;
z ← u;
x ← Father(u);
while x 6= root(C (G)) do
switch type of x do
case a series module
foreach child y 6= z of x do
N ← N ∪ Leaves(y);
end
case a Neighborhood module
foreach edge (z,y) ∈ x do
N ← N ∪ Leaves(y);
end
endsw
z ← x;
x ← Father(x);
end
return N
end
4.1 Datasets
We use the same datasets considered in (Han et al.,
2013) for proving the superiority of Turbo
ISO
against
the other algorithm of the literature described in Sec-
tion 1. These datasets are referred to as AIDS, NASA,
and Human. Their description is as follows:
• AIDS database: This dataset consists of graphs
representing molecular compounds. It contains
10, 000 small graphs of 27 edges. The number of
unique labels in AIDS is 51.
• NASA database: This dataset contains 36, 790
trees with an average size of 32, and a number
of unique labels of 117, 302.
• HUMAN database: This dataset consists of one
large graph representing a protein interaction net-
work. This graph has 4,675 vertices and 86, 282
edges. The number of unique labels in the dataset
is 90.
We present a summary of these graph databases in
Table 2. Besides the average number of vertices and
edges of the graphs in the dataset, we also give the av-
erage compression rate of each dataset. Given a graph
G and its compressed graph C (G), the compression
rate of G is given by: CR(G) =
|E(C (G)|)|
|E(G)|
· 100%. It
compares the number of edges in C (G) in respect to
G.
Graphs within the three datasets were preliminar-
ily compressed using an extension of the algorithm
proposed in (Capelle et al., 2002; Habib et al., 2004)
Table 2: Graph Dataset Characteristics. avg|V|: average
number of vertices. avg|E|: average number of edges. CR
average compression rate.
Dataset Number of avg|V| avg|E| CR
graphs
AIDS 10,000 26 27 56.8%
NASA 36,790 94 32 44.2%
HUMAN 1 4,675 86,282 61%
that computes the modular decomposition of a graph
in linear time. So, we compress an input graph in
O(n+ m) time, where n is the number of vertices and
m the number of edges of the graph.
To show the storage saving obtained by compress-
ing the datasets, Table 3 reports the size on disk of
each dataset before and after compression. We also
provide the time necessary to compress each dataset.
Table 3: Size on disk.
Dataset Size on disk (Mb) Size on disk after Compression
compression (Mb) time(ms)
AIDS 4.59 2.18 230
NASA 24 14.42 180
HUMAN 1.15 0.24 195
The experiments are performed on a 2.40 GHz
Intel(R) Core(TM) i5 − 4210U 64 bits laptop with
8 GB of RAM running windows 7. The algorithm is
implemented in C++.
We use the same query sets as in (Han et al.,
2013). These queries are constructed as follows (Han
et al., 2013):
• AIDS and NASA query sets: For each of these
datasets, the authors of (Han et al., 2013) con-
structed 6 query sets (Q4, Q8, Q12, Q16, Q20,
Q24), each of which contains 1,000 query graphs
of the same size. Additionally, each query Q
i
is
contained in a query Q
i+1
. Each query is a sub-
graph of a graph in the dataset.
• Human Query sets: For this dataset, the authors of
(Han et al., 2013) generated three kind of queries:
1. Subgraph queries as for the Aids and Nasa
datasets. In this case, we have 10 query sets
obtained by varying the number of query sizes
from 1 to 10.
2. Clique queries where the query subgraph is a
complete graph. For biological datasets, such
as Human, a clique Query corresponds to a pro-
tein complex (He and Singh, 2008).
3. Path queries where the query subgraph is a
path. A path query corresponds to transcrip-
tional or signaling pathways (He and Singh,
2008).
IoTBD 2016 - International Conference on Internet of Things and Big Data
210

2
3
4
5
6
7
8
9
10
11
4 8 12 16 20 24
Time(ms)
Size of the Query Graph
Turbo
ISO
Sum
ISO
Figure 5: AIDS dataset.
The time performance reported in the results is the
average time computed over the sets of queries of the
same size.
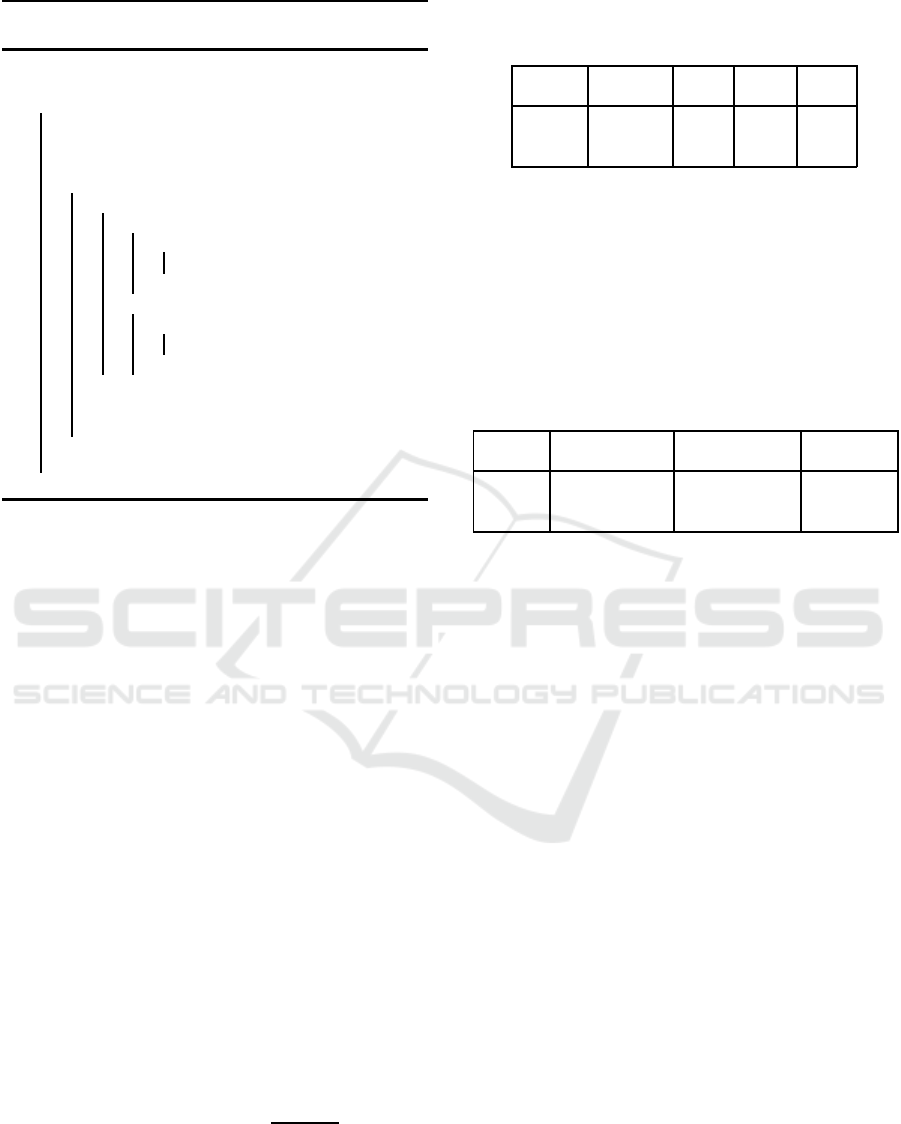
4.2 Results
Figure 5 shows the experimental results for AIDS. We
can clearly see that the time performed by Turbo
ISO
decreases when the query size increases. This is
explained in (Han et al., 2013) by the containment
relationship among the query sets in AIDS. We can
also observe the same behavior with Sum
ISO
which
achieves better than Turbo
ISO
. In our case, this
can be explained by important compression rate of
AIDS that yields a small number of candidates to be
considered.
15
20
25
30
35
40
45
50
4 8 12 16 20 24
Time(ms)
Size of the Query Graph
Turbo
ISO
Sum
ISO
Figure 6: NASA dataset.
Figure 6 shows the experimental results for
NASA. For this dataset, Sum
ISO
achieves signifi-
cantly better than Turbo
ISO
for all the queries.
Figure 7 shows the results of subgraph queries
over the human dataset. The superiority of Sum
ISO
over Turbo
ISO
is clearly observable as soon as the
query size is greater than 8.
Figure 8 shows the results of subgraph isomor-
phism search for path and clique queries over the Hu-
man dataset. For the clique queries, Sum
ISO
signif-
icantly outperforms Turbo
ISO
. This is mainly due to
the fact that a clique is compressed to a single node
in our approach. For path queries, we have also a bet-
ter results than Turbo
ISO
even if not significantly. We
explain this by the fact that paths are not summarized
by modular decomposition.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
1 2 3 4 5 6 7 8 9 10
Time(ms)
Size of the Query Graph
Turbo
ISO
Sum
ISO
Figure 7: Human dataset.
5 CONCLUSIONS
In this paper, we presented a new approach to
subgraph isomorphism search in massive graph
databases. In our approach, data graphs are summa-
rized to minimize storage requirement. Our subgraph
isomorphism search algorithm, Sum
ISO
, finds all the
embeddings of a query graph in a summarized data
graph without decompressing the graph. Our experi-
mentations show that the proposed approach achieves
good performance on both time processing of queries
and space storage of data graphs. However, several
enhancement issues are possible and merit investiga-
tion. First, more experiments are needed to attest the
efficiency of the approach. In fact, we used the same
datasets as in (Han et al., 2013) for our evaluation to
compare with the Turbo
ISO
algorithm. These datasets,
namely AIDS, NASA and HUMAN are highly com-
pressible with more than 40% of compression rate.
However, not all the graphs are compressible with the
same rate. So, it is interesting to study the behavior
of the approach with less compressible graphs. Sec-
ond, it is interesting to compare the two approaches
on larger graphs. Third, it is interesting to see if it is
feasible to ran such an approach on a graph database
such as Neo4j and also investigate how it can be
implemented in a MapReduce framework. Finally,
we have not used pruning methods in the Subgraph-
Search phase and it may be possible to define some
rules to prune the explored compressed paths by rely-
ing on the properties of the compression.
Subgraph Isomorphism Search in Massive Graph Databases
211

0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2 3 4 5 6 7 8 9 10
Time(ms)
Size of the Query Graph
Turbo
ISO
Sum
ISO
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
2 3 4 5 6 7
Time(ms)
Size of the Query Graph
Turbo
ISO
Sum
ISO
(a) Path Queries. (b) Clique Queries.
Figure 8: Path and Clique Queries.
ACKNOWLEDGEMENTS
This work is partially funded by the French National
Research Agency (ANR) project CAIR (ANR-14-
CE23-0006).
REFERENCES
Basu, M. and BBA, T. K. H. (2006). Data Complexity in
Pattern Recognition. Springer.
Capelle, C., Habib, M., and Montgolfier, F. D. (2002).
Graph decompositions and factorizing permutations.
Discrete Mathematics & Theoretical Computer Sci-
ence - DMTCS, 5(1):55–70.
Chen, C., Lin, C. X., Fredrikson, M., Christodorescu, M.,
Yan, X., and Han, J. (2009). Mining graph patterns
efficiently via randomized summaries. Proc. VLDB
Endow., 2(1):742–753.
Cheng, J., Ke, Y., Ng, W., and Lu, A. (2007). Fg-index:
Towards verification-free query processing on graph
databases. In Proceedings of the 2007 ACM SIGMOD
International Conference on Management of Data,
SIGMOD ’07, pages 857–872, New York, NY, USA.
ACM.
Cordella, L. P., Foggia, P., Sansone, C., and Vento, M.
(2004). A (Sub)Graph Isomorphism Algorithm for
Matching Large Graphs. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 26:1367–
1372.
Dahlhaus, E., Gustedt, J., and McConnell, R. (1997).
Efficient and practical modular decomposition. In
eighth annual ACM-SIAM symposium on Discrete al-
gorithms, pages 26–35.
Fan, W., Li, J., Ma, S., Tang, N., Wu, Y., and Wu, Y. (2010).
Graph pattern matching: From intractable to polyno-
mial time. Proc. VLDB Endow., 3(1-2):264–275.
Fan, W., Li, J., Wang, X., and Wu, Y. (2012). Query
preserving graph compression. In Proceedings of
the 2012 ACM SIGMOD International Conference on
Management of Data, SIGMOD ’12, pages 157–168,
New York, NY, USA. ACM.
Gallagher, B. (2006). Matching structure and semantics: A
survey on graph-based pattern matching. AAAI FS,
6:45–53.
Gallai, T. (1967). Transitiv orientierbare graphen. Acta
Mathematica Hungarica, 18:25–66.
Garey, M. R. and Johnson, D. S. (1979). Computers
and Intractability: A Guide to the Theory of NP-
Completeness.
Habib, M., Montgolfier, F. D., and Paul, C. (2004). A sim-
ple linear-time modular decomposition algorithm for
graphs. Scandinavian Workshop on Algorithm Theory
- SWAT, pages 187–198.
Habib, M. and Paul, C. (2010). A survey of the algorithmic
aspects of modular decomposition. Computer Science
Review, 4(1):41–59.
Han, W.-S., Lee, J., and Lee, J.-H. (2013). Turboiso:
Towards ultrafast and robust subgraph isomorphism
search in large graph databases. In Proceedings of
the 2013 ACM SIGMOD International Conference on
Management of Data, SIGMOD ’13, pages 337–348,
New York, NY, USA. ACM.
He, H. and Singh, A. (2006). Closure-tree: An index struc-
ture for graph queries. In Data Engineering, 2006.
ICDE ’06. Proceedings of the 22nd International Con-
ference on, pages 38–38.
He, H. and Singh, A. K. (2008). Graphs-at-a-time: Query
language and access methods for graph databases. In
Proceedings of the 2008 ACM SIGMOD International
Conference on Management of Data, SIGMOD ’08,
pages 405–418, New York, NY, USA. ACM.
Khoo, K. G. and Suganthan, P. N. (2001). Multiple rela-
tional graphs mapping using genetic algorithms. pages
727–737.
Lagraa, S. and Seba, H. (2016). An efficient exact algorithm
for triangle listing in large graphs. Data Mining and
Knowledge Discovery, pages 1–20.
Lagraa, S., Seba, H., Khennoufa, R., M’Baya, A., and
Kheddouci, H. (2014). A distance measure for large
graphs based on prime graphs. Pattern Recognition,
47(9):2993 – 3005.
Lee, J., Han, W.-S., Kasperovics, R., and Lee, J.-H. (2013).
An in-depth comparison of subgraph isomorphism al-
gorithms in graph databases. In Proceedings of the
39th international conference on Very Large Data
IoTBD 2016 - International Conference on Internet of Things and Big Data
212

Bases, PVLDB’13, pages 133–144. VLDB Endow-
ment.
Micheli, A. (2009). Neural network for graphs : A con-
textual constructive approach. IEEE Transactions on
Neural Networks, 20(3):498–511.
M¨ohring, R. (1985a). Algorithmic aspect of the substitution
decomposition in optimization over relation, set sys-
tem and boolean function. Ann. Operations Research,
4:195–225.
M¨ohring, R. (1985b). Algorithmic aspects of comparability
graphs and interval graphs. I. Rival. Graphs and Order
(D. Reidel), pages 41–101.
Quaddoura, R. and Mansour, K. (2010). Classical graphs
decomposition and their totally 2010 decomposable
graphs. International Journal of Computer Science
and Network Security, 10:1240–1250.
Shang, H., Zhang, Y., Lin, X., and Yu, J. X. (2008). Tam-
ing verification hardness: An efficient algorithm for
testing subgraph isomorphism. Proc. VLDB Endow.,
1(1):364–375.
Shasha, D., Wang, J. T. L., and Giugno, R. (2002).
Algorithmics and applications of tree and graph
searching. In Proceedings of the Twenty-first ACM
SIGMOD-SIGACT-SIGART Symposium on Principles
of Database Systems, PODS ’02, pages 39–52, New
York, NY, USA. ACM.
Spinrad, J. P. (2003). Efficient Graph Representation.
American Mathematical Society.
Sun, Z., Wang, H., Wang, H., Shao, B., and Li, J. (2012).
Efficient subgraph matching on billion node graphs.
PVLDB, 5(9):788–799.
Tedder, M., Corneil, D. G., Habib, M., and Paul, C. (2008).
Simpler linear-time modular decomposition via re-
cursive factorizing permutations. In Automata, Lan-
guages and Programming, 35th International Collo-
quium, ICALP 2008, Reykjavik, Iceland, July 7-11,
2008, Proceedings, Part I: Tack A: Algorithms, Au-
tomata, Complexity, and Games, pages 634–645.
Ullmann, J. R. (1976). An Algorithm for Subgraph Isomor-
phism. J. ACM, 23(1):31–42.
Yan, X., Yu, P. S., and Han, J. (2004). Graph indexing: A
frequent structure-based approach. In Proceedings of
the 2004 ACM SIGMOD International Conference on
Management of Data, SIGMOD ’04, pages 335–346,
New York, NY, USA. ACM.
Zhang, S., Li, S., and Yang, J. (2009). Gaddi: Dis-
tance index based subgraph matching in biological
networks. In Proceedings of the 12th International
Conference on Extending Database Technology: Ad-
vances in Database Technology, EDBT ’09, pages
192–203, New York, NY, USA. ACM.
Zhao, P. and Han, J. (2010). On graph query optimization
in large networks. PVLDB, 3(1):340–351.
Zhao, P., Yu, J. X., and Yu, P. S. (2007). Graph indexing:
Tree + delta >= graph. In Proceedings of the 33rd
International Conference on Very Large Data Bases,
VLDB ’07, pages 938–949. VLDB Endowment.
Zou, L., Chen, L., Yu, J. X., and Lu, Y. (2008). A novel
spectral coding in a large graph database. In Pro-
ceedings of the 11th International Conference on Ex-
tending Database Technology: Advances in Database
Technology, EDBT ’08, pages 181–192, New York,
NY, USA. ACM.
Subgraph Isomorphism Search in Massive Graph Databases
213
