
SNAL: Spatial Network Algebra for Modeling Spatial Networks in
Database Systems
Lin Qi, Huiyuan Zhang and Markus Schneider
Department of Computer & Information Science & Engineering, University of Florida, Gainesville, U.S.A.
Keywords:
Spatial Networks, Spatial Database, Abstract Model, Design Criteria, Spatial Network Algebra.
Abstract:
Spatial networks such as road networks, river networks, telephone networks, and power networks are ubiq-
uitous spatial concepts deployed, for example, in route planning, communication services, high voltage grid
topology analysis, and utility management. Current database systems are unable to efficiently handle, rep-
resent, store, query, and manipulate large spatial networks. Moreover, data models of spatial networks in a
database context are rare due to their inherently complex nature. This paper offers a conceptual foundation
called Spatial Network Algebra (SNAL) for designing, characterizing, and representing spatial networks. A
general-purpose abstract model is proposed as a specification for a later implementation of spatial networks in
different environments such as spatial database systems and GIS.
1 INTRODUCTION
A spatial network is a spatially embedded and labeled
graph. Infrastructures like road networks, power net-
works, and river networks are examples of spatial
networks. Advances in and analytical applications
around such networks have boosted urbanization and
infrastructure development and produced large vol-
umes of spatial data describing the complex inner
structure and connectivity features of these networks.
Given the fact that existing data models, query
languages as well as geo-information aware database
systems hardly offer adequate and sophisticated sup-
port for the modeling and querying of spatial net-
works, we propose to build up an explicit object-
oriented data model and query language. This data
model integrates an explicit modeling and querying
of networks into a standard database environment.
Database support is essential to store the large vol-
umes of spatial network data and to utilize them in
various GIS applications in an efficient way. Pro-
viding a spatial data type for spatial networks by
means of an abstract data type that is integrated into
a database system would also allow a user to query
and manipulate spatial networks in a database setting
by high-level operations defined on them. In other
words, spatial networks would become ”first class cit-
izens” in the database allowing SQL queries to run on
spatial networks and take advantage of the spatial net-
work operations and predicates.
In this paper, we focus on developing an abstract
model of spatial networks without any regard to im-
plementation details. This step involves providing a
formal definition of spatial networks based on math-
ematical concepts instead of an intuitive description.
The existence of a formal definition that precisely de-
scribes the properties of spatial networks is essential
for defining operations and predicates on them. In
other words, the model will perform as a type sys-
tem for spatial networks, which we call Spatial Net-
work Algebra (SNAL). The abstract data model is
based on point set theoretical and topological con-
cepts. We conceptually associate all points of the Eu-
clidean plane with thematic values. All points with
equal thematic values are part of the same component
of the network (e.g., all points with the same interstate
name “I75”). Interior and exterior components of a
network can be distinguished based on these thematic
values. Further, this model will act as a specification
for the eventual implementation of spatial networks
in databases. In particular, this approach enables us
to consider attribute values of single points in the net-
work (space based view) but also provides access to
collection of points having equal attributes values (ob-
ject based view).
The rest parts of this paper are organized as fol-
lows: Section 2 discusses the related models of spatial
networks and compares them with our approach. Our
abstract data model of spatial networks is introduced
in Section 3. Finally, Section 4 concludes the paper.
Qi, L., Zhang, H. and Schneider, M.
SNAL: Spatial Network Algebra for Modeling Spatial Networks in Database Systems.
In Proceedings of the 2nd International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2016), pages 145-152
ISBN: 978-989-758-188-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
145

2 RELATED WORK
Conceptual data models for spatial networks can
be broadly classified into three categories: graph-
oriented models, hybrid models, and network-
oriented models.
One reasonable and natural idea is to model spa-
tial networks as graphs to capture their structure and
connectivity. Since nodes and arcs correspond to the
vertices and edges of a graph, the planar embedding
of the node-arc data models in GIS ensure topologi-
cal consistency and regard a spatial network as a di-
rected graph. This concept has been taken in G
¨
uting
(1994), Erwigm and G
¨
uting (1994), Brinkhoff (2002),
Gupta et al. (2004), Jeung et al. (2010). The model in
G
¨
uting (1994) is designed for embedding graphs in
databases and not specifically for spatial networks. A
multi-level order-sorted algebra described in Erwigm
and G
¨
uting (1994) shared a similar idea with our pro-
posed model which allows users to express a query at
a high level of abstraction. The authors in Jensen et al.
(2003) point out that the graph modeling of a spatial
network is not appropriate as it does not present a re-
alistic representation of enough complexity in the real
world. Besides, graph-oriented modeling of spatial
networks are unable to represent the spatial embed-
ding of a network Qi and Schneider (2012).
The hybrid modeling of spatial networks is an al-
ternative approach that introduces spatial embedding
to each vertex in a graph-oriented model. The work
in Scheider and Kuhn (2008) models road networks
as partially embedded graphs and defines road com-
ponents based on their properties. The path-based
approach Krogh et al. (2014) and the PARINET ap-
proach Popa et al. (2011) model the network in a hy-
brid manner that supports segments, edges, and route
abstractions. These partial graph-oriented approaches
lose the geometric information in the networks and
only maintain the topology of the network. Moreover,
this solution does not allow spatial networks to have
attributes of their own. Though effective, it has been
shown that this method of modeling a spatial network
is neither elegant nor robust Miller and Shaw (2001).
Network-oriented models are geometry-based
models for spatial networks. The most well known
network model is G
¨
uting et al. (2006) which creates
an explicit network data model to be used specifi-
cally for an implementation of moving objects in a
network. This model treats a spatial network as a
set of routes and a set of junctions between routes.
A recent advance in Ding et al. (2015) introduces a
new network-matched mechanism to derive moving
objects trajectories. Since both of the models fo-
cus on modeling of moving objects in road networks,
they are heavily biased towards road networks with
specific features, for example, to distinguish between
simple and dual (divided) roads and thus cannot serve
as generic network models. Our emphasis in this pa-
per is on an increase of the functionality and elegance
at the conceptual level, the propagation of the abstract
data type approach in a database context, and the pos-
sibility of query support.
3 FORMAL DEFINITION OF AN
ABSTRACT SPATIAL
NETWORK MODEL
This section provides our complete abstract data
model for spatial networks, SNAL, which is the ex-
tension of the spatial network specification in Qi et al.
(2015). Let (X,T ) be a topological space Dugundi
(1966) with topology T ⊂ 2
X
. For each 3D spatial
data type A, we will specify the topological notations
of boundary (∂A), interior (A
o
), exterior (A
−
), and
closure (
¯
A). To give structural definitions, we need to
first present some basic notations and definitions.
Function and Range. The application of a func-
tion f : A → B is a set of values S ⊂ A defined as
f (S) := { f (x)|x ∈ S}. If f (S) returns a singleton set,
we will then write f [S] to denote the single element,
i.e. f (S) = {y} ⇒ f [S] = y. The inverse function of
f is defined as f
−1
(y) := {x ∈ A| f (x) = y}. Since
f is not always a bijection, therefore the signature of
f
−1
is f
−1
: B → 2
A
where 2
A
is the power set of A,
it is sometimes denoted as P(A) or P (A). It is impor-
tant to note that f
−1
is a total function and that f
−1
applied to a set yields a set of sets. We also define a
range function of a function f : A → B that returns the
set of all elements that f returns for an input set A as
rng( f ) := f (A).
Label Type. In a spatial network, each point is as-
sociated with a label. A label is consist of two parts:
spatial label (sl) and thematic label (tl). The spatial
label specifies the ownership of the point. For exam-
ple, the spatial labels of the simple points that belong
to the same area are identical. Each point also carries
certain thematic information, such as the oil pipe di-
ameter in a pipeline network, ship capacity in a river
network or speed limit in a road network at this spe-
cific point. During abstract modeling, spatial label
plays an important role and is frequently referenced.
From this point forward, we use the term label to refer
to a spatial label that is attached to each point.
We call a type that contains labels of the same
kind as label type. We assume that each label type A
contains an element ⊥
A
that represents the undefined
GISTAM 2016 - 2nd International Conference on Geographical Information Systems Theory, Applications and Management
146

value. It is called the exterior label, and the outside
area of a network is labeled by it. For the Cartesian
product of two label types A and B, we let ⊥
A×B
=
(⊥
A
,⊥
B
), and for the union of A and B, we equate
⊥
A
, ⊥
B
, and ⊥
A∪B
. Further, if no ambiguities can
arise, we omit the type index and simply use ⊥.
Spatial Mapping. Given label type A, let L = 2
A
be the corresponding label space. A spatial mapping
of type A is then defined as a total function π : R
3
→ L.
Let A be the label type, and π be the spatial map-
ping with an arbitrary spatial partition McKenney and
Schneider (2007), the area and border of π are de-
fined as
γ(π) = π
−1
(rng(π) ∩ {X ∈ 2
A
| card(X) = 1}); (1)
ω(π) = π
−1
(rng(π) ∩ {X ∈ 2
A
| card(X) > 1}). (2)
where γ(π) represents the area and ω(π) repre-
sents the border respectively. The labels on the
borders are modeled using the power set 2
A
: a
area of π is a block mapped to a singleton set,
as opposed to a border of π which is a block
that is mapped to a subset of A containing two
or more elements. As an example, for type
A = {a,b, ⊥}, the range function gives us rng(π) =
{{a},{b},{⊥}, {a,b},{a,⊥}, {b,⊥},{a,b, ⊥}}.
Therefore, the areas of π are the blocks labeled {a},
{b}, and {⊥} while the borders are the blocks labeled
{a,b}, {a,⊥}, {b,⊥}, and {a,b, ⊥}. The structural
definitions are given based on appropriate spatial
mapping function. To sum up, the goal is to identify
a spatial mapping that assigns appropriate thematic
information (i.e. appropriate areas and borders) to
every point in R
3
space. Such a spatial mapping
represents a spatial network.
Now we start introducing the comprising data
types that belong to the spatial networks, we will be-
gin from the simplest type to more complex ones.
3.1 Poi3D
A single point in 3D space (R
3
) is of spatial data type
Poi3D. Spatial data type Poi3D is defined as
Poi3D = (x,y, z) where x,y,z ∈ R (3)
Each Poi3D is consist of an ordered triple of co-
ordinates: x, y, and z in Euclidean plane. We say that
two Poi3D’s p and q coincide if, and only if, x
p
=
x
q
∧ y
p
= y
q
∧ z
p
= z
q
. If two points do not coincide,
they are called disjoint. The topological notations of
a simple point p = (x,y, z) are defined as: (1) ∂p = ∅;
(2) p
o
= {p}; (3) p
−
= R
3
− (∂p ∪ p
o
) = R
3
− {p};
(4) ¯p = (∂p ∪ p
o
) = {p}. In addition, for a simple
point type Poi3D, the structural definition would be
an image of this point in label space with a certain
label type that is a subset of 2
A
.
3.2 Point3D
A value of type Point3D is defined as a finite set
of isolated Poi3D’s in 3D space. Spatial data type
Point3D is formally defined as
Point3D = {P ⊂ R
3
| 0 ≤ card{P} < ∞ ∧
P is distinct} (4)
where card{P} is the cardinality of set P that mea-
sures the total number of simple points of the set. We
call Point3D a complex point. For a complex point P,
if card{P} = 1, it then represents a singleton set that
only includes one Poi3D. If card{P} = 0, set P be-
comes an empty set ∅. An empty set can be admitted
from geometric operations such as intersection and
union. For example, the intersection of two Point3D’s
with no points in common yields the empty set. The
topological components of a complex object is always
the union of its consisting simple objects. The topo-
logical notations of a point P = {p
1
, p
2
,..., p
n
} are de-
fined as: (1) ∂P = ∪
i=1,2,...,n
∂p
i
= ∪
i=1,2,...,n
∅ = ∅;
(2) P
o
= ∪
i=1,2,...,n
p
o
i
= ∪
i=1,2,...,n
{p
i
} = P; (3) P
−
=
R
3
− (∂P ∪ P
o
) = R
3
− P; (4)
¯
P = ∂P ∪ P
o
= P.
3.3 Curve3D
The value type Curve3D is defined as the image of
continuous mapping from 1D to 3D space. In par-
ticular, the domain in 1D space is usually taken as a
closed interval [0,1] without losing generality. This
is because any finite domain of closed interval can
be mapped to [0,1] and therefore is homogeneous to
[0,1]. The shape of the curve can be straight or arbi-
trarily twisted in 3D plane given the condition that it
is not self-intersected. Due to this fact, we call such
kind of curve as a simple curve.
Spatial data type Curve3D is formally defined as
Curve3D = { f ([0,1]) |
(i) f ([0,1]) → R
3
is a continuous mapping ∧
(ii) ∀a, b ∈ (0,1) : a 6= b ⇒ f (a) 6= f (b) ∧
(iii) ∀a ∈ {0, 1},∀b ∈ (0, 1) : f (a) 6= f (b)} (5)
where condition (i) specifies the continuous mapping
f : [0, 1] → R
3
, i.e. ∀u ∈ [0, 1], ∃v = f (u) where v is of
type Poi3D. Condition (ii) is a strong constraint that
the images of two different values within (0,1) must
also be different. This means any intermediate point
of the curve must be disjoint from all other intermedi-
ate points. This ensures that Curve3D does not inter-
sect with itself. From condition (iii), the end points
of the curve ( f (0) and f (1)) cannot coincide with any
of the interior point along the same curve. However,
this condition does not prohibit f (0) = f (1). In the
SNAL: Spatial Network Algebra for Modeling Spatial Networks in Database Systems
147

Figure 1: Examples ((a)(b)(c)) and Counter-examples ((d)(e)) of Curve3D’s.
case that end points coincide, the curve is called a
loop curve or closed curve. Figure 1(a), 1(b), and 1(c)
are typical examples of a spatial data type Curve3D.
However, Figure 1(d) is not of type Curve3D since it
allows the equality of an interior point with an end
point. Figure 1(e) is also not a Curve3D as it inter-
sects itself.
For a simple curve c with the mapping function
f , the boundary of c is defined as the set of its end
points, i.e. ∂c = { f (0), f (1)}. It is denoted that
e(c) = { f (0), f (1)}. Note that this set can be a sin-
gleton set in the case of a loop curve. The interior
of the curve includes all points contained in the curve
except for the end points: c
o
= c − e(c). For the clo-
sure we obtain ¯c = ∂c ∪ c
o
= c. Therefore the exterior
is defined as c
−
= R
3
− c.
Topological Relationships between Curve3D’s.
Based on the 9-Intersection Model Egenhofer and
Herring (1990), the topological relationships between
two simple curves c
i
and c
j
are included in the fol-
lowing matrix:
R(c
i
,c
j
) =
c
o
i
∩ c
o
j
c
o
i
∩ ∂c
j
c
o
i
∩ c
−
j
∂c
i
∩ c
o
j
∂c
i
∩ ∂c
j
∂c
i
∩ c
−
j
c
−
i
∩ c
o
j
c
−
i
∩ ∂c
j
c
−
i
∩ c
−
j
Each intersection will be characterized by a value
of empty (∅) or non-empty(¬∅). Therefore there can
be 2
9
= 512 different configurations. But not all of the
configurations are realistic and meaningful. We are
more interested in the following relationships which
will be utilized in further spatial data type definitions:
1. disjoint: c
i
and c
j
are called disjoint if they do not
have any points in common. To define it formally,
we state ∀a ∈ [0,1], ¬∃b ∈ [0, 1], s.t. f (a) = g(b);
2. meet: c
i
meets c
j
if they have only one shared end
point. The equivalent conditions are
(i) ∀a,b ∈ (0,1), s.t. f (a) 6= g(b) ∧
(ii) ∀a, b ∈ {0,1}, s.t. f (a) = g(b) ∧ f (|1 −a|) 6=
g(|1 − b|);
3. quasi-disjoint: Two curves c
i
, c
j
are called quasi-
disjoint, if their interiors do not intersect. They
are allowed to meet in the endpoints. It is formally
defined with the following conditions:
(i) ∀a,b ∈ (0,1), s.t. f (a) 6= g(b) ∧
(ii) ∀a ∈ (0, 1),b ∈ {0, 1}, s.t. f (b) 6= g(a)
∧ g(b) 6= f (a);
4. touch: c
i
touches c
j
if, and only if
(i) ∀a,b ∈ (0,1), s.t. f (a) 6= g(b) ∧
(ii) ∃a ∈ (0, 1), s.t. f (0) = g(a) ∨ f (1) = g(a)
∨ f (a) = g(0) ∨ f (a) = g(1).
3.4 Branch3D
If we would represent curves in Figure 1(d) and (e)
based on the abstract data type Curve3D, we need to
separate the whole line into sub-curves so that each
sub-curve is a Curve3D and they are interconnected.
For example, the curve in Figure 1(d) can be decom-
posed into two simple curves: f (0) to f (t), and f (t)
to f (1) while the curve in Figure 1(e) can be decom-
posed into three simple curves: f (0) to f (t), f (t) to
f (1), and the loop with the coincide end point f (t).
Based on this decomposition, given the set of the sim-
ple curves c
1
,c
2
,...,c
n
that contribute to the whole
line, it is observed that
1. there can be more than two curves that form the
shape;
2. no curves are disjoint with all other curves;
3. adjacent curves quasi-disjoint with each other
with at least one coincide end point.
Geometrically, we call the set of these connected
simple curves as Branch3D. Let C be the set of all
simple curves in R
3
.
Spatial data type Branch3D is formally defined as
Branch3D = {∪
n
i=1
c
i
|
(i) n ∈ N, ∀i ∈ {1,2..., n} : c
i
∈ C ∧
(ii) ∀i ∈ {1, 2,..., n},∃ j 6= i, s.t. c
i
meets c
j
∧
(iii) ∀i 6= j, c
i
and c
j
are quasi − dis joint ∧
(iv) n = 1∨ (6)
card({ f
i
| ∀k ∈ {0,1},
card({ f
j
| j ∈ {1, 2,...,i − 1,i + 1, ...,n}∧
( f
j
(0) = f
i
(k) ∨ f
j
(1) = f
i
(k))}) = 1}) ≥ 2}
where condition (i) ensures all components of
Branch3D are simple curves; condition (ii) posts the
restriction that for any curve, there exists another one
GISTAM 2016 - 2nd International Conference on Geographical Information Systems Theory, Applications and Management
148

that meets this curve in the same branch; condition
(iii) emphasizes the non-intersection relationships be-
tween all curves; condition (iv) makes sure that each
Branch3D should have at least two curves that have
one of the end points isolated and does not belong to
any other curves. In other words, each branch cannot
be wrapped by two loop curves.
Figure 2(a) and (b) gives two examples of data
type Branch3D. However, Figure 2(c) does not form
a Branch3D as it breaks condition (iv).
Let B be the set of all Branch3D’s. For a
branch b = {∪
n
i=1
c
i
} ∈ B with corresponding map-
pings f
1
, f
2
,..., f
n
, the topological notations are de-
fined as: (1) As ∪
n
i=1
∂c
i
= ∪
n
i=1
e(c
i
) = E(b), note that
we need to exclude the internal end points from E(b)
to formulate the boundary. Therefore, ∂b = E(b) −
{p ∈ E(b) | card({ f
i
| i ∈ {1, 2,..., n} ∧ ( f
i
(0) = p ∨
f
i
(1) = p)}) 6= 1}; (2) The interior of the branch in-
cludes all points from all curves except for boundary
points, i.e. b
o
= b − ∂b; (3) The closure of the branch
is
¯
b = ∂b ∪ b
o
= b; (4) The exterior of the branch is
then defined as b
−
= R
3
− b since R
3
is the embed-
ding space.
As for Branch3D data type, we will now give the
corresponding structural definition. For a branch b =
{∪
n
i=1
c
i
}, let A = {A
i
},1 ≤ i ≤ n be the corresponding
label type for each of the curve. Therefore
interior : ∀p ∈ c
o
i
∈ b,π(p) = {A
i
}; (7)
boundary : ∀p ∈ ∂b, card(π(p)) > 1; (8)
exterior : ∀p ∈ b
−
,π(p) = {⊥}. (9)
Label space L = 2
A
= {{A
1
},...,{A
n
},{A
1
,A
2
},
{A
1
,A
3
},...,{A
1
,A
2
,A
3
},...,{A
1
,A
2
,...,A
n
},{⊥}}.
The interior of Branch3D will be mapped to singleton
set in label space excluding {⊥}. Formula (8)
confines that any point that belongs to the boundary
of b will be mapped to a subset of 2
A
with more than
one element. The exterior is labelled with {⊥}. As
shown in Figure 2(d), the branch object is consist
of five curves with labels A, B, C, D, and E. The
boundary points are mapped to the label space with
more than one element while the exterior of the
branch is mapped to {⊥}. Note that the structural
definition of Curve3D is a special case of Branch3D.
3.5 Hub3D
Hubs are important components of spatial networks.
Generally speaking, hubs are locations and areas that
connect different branches together and may also
function as a boundary of the spatial network. In our
abstract model, the concept of hub represents a ge-
ometric layout and its coverage. Examples of hubs
are numerous, from metro stations in road networks
to lakes in in-land river networks, from power switch
in grid networks to airport in aviation networks. Note
that the hubs can be formed by humans or by nature,
as long as they belong to the spatial network.
Geometrically, Hub3D’s are three-dimensional re-
gions that connect with one or more branches. And in
our model, we do not emphasize (or intend) to model
the internal structures of hubs. Thus, Hub3D is seen
as a black box. Before giving the definition of Hub3D,
we need to define a simple region and Hub2D data
types in 2D space. In the simplest case, a region ob-
ject consists of a single connected component and is
called a simple region. The point set in the 2D Eu-
clidean space representing a simple region object is
connected, closed, and bounded. The formal defini-
tions of these features can be found in Liu and Schnei-
der (2010). Due to space limit, we skip the definition
of SRegion2D, SRegion3D and move to the definition
of Hub2D and Hub3D. These omitted definitions can
be found in our next extension.
In general, Hub2D is allowed to contain none,
one, or more than one holes by condition (i). Condi-
tion (ii) ensures that the holes are contained in the re-
gion object and we do not allow holes to intersect each
other (in the case of intersection, we could combine
two holes into one). Condition (iv) makes Hub2D
different from a normal region in the sense that it re-
quires the region to connect to a certain branch ob-
ject at only one end point. There is no limitation of
the number of branches that can connect to the re-
gion, as long as they touch the region on the bound-
ary. Based on previous definitions, now we are able
to define Hub3D object as
Hub3D = {h(U) |
(i) ∀U ∈ HUB2D, h : U → R
3
∧ (10)
(ii) h is a continuous mapping}
The above definition is a lift from Hub2D to R
3
.
Formally, we can summarize and give the definition
of spatial data type Hub3D as
Hub3D = {R ⊂ SR3D |
(i) ∀R
i
∈ SR3D,i ∈ N, ∃Q ∈ SR3D, s.t.
R = Q − ∪
n
i=0
R
i
where n ∈ N ∧
(ii) ∀i ∈ {0, 1,..., n},Q contains R
i
∧ (11)
(iii) ∀i 6= j, R
i
and R
j
are dis joint ∧
(iv) ∃b ∈ B, card({p ∈ R
3
|
(∃curve c ∈ b, f
c
(0) = p ∨ f
c
(1) = p)∧
p ∈ ∂R}) = 1}
Similar to Hub2D, Hub3D type can also contain
holes or cavities inside. And condition (iv) requires
Hub3D to connect to at least one branch in R
3
.
SNAL: Spatial Network Algebra for Modeling Spatial Networks in Database Systems
149
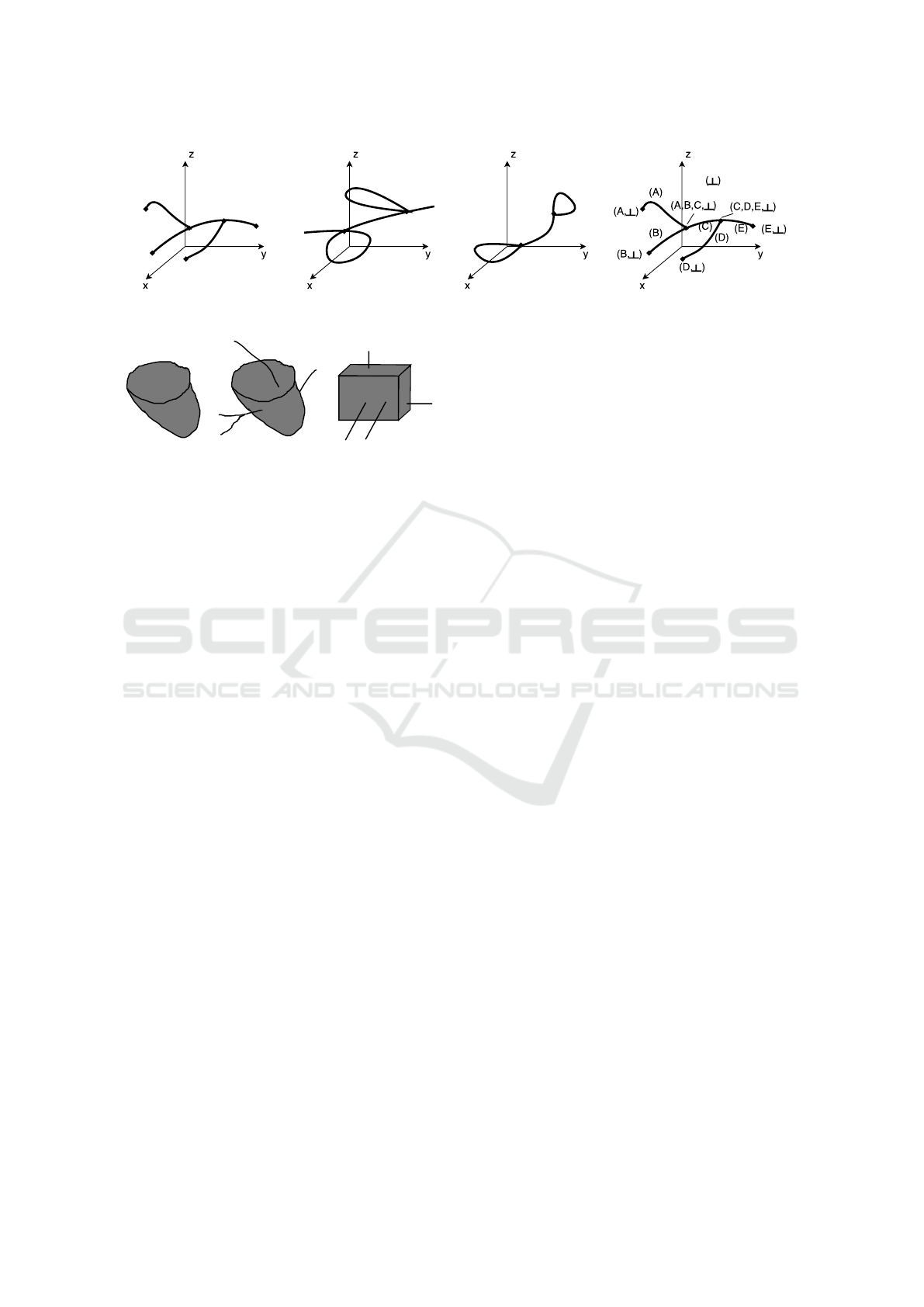
Figure 2: Examples ((a)(b)(d)) and Counter-example ((c)) of Branch3D’s.
Figure 3: (a) SRegion3D Example; (b)(c) Hub3D Examples.
Figure 3(a) depicts a simple region in R
3
. The
shape of a hub can be arbitrary, such as a naturally
formulated lake (Figure 3(b)); it can also be regu-
lated by humans, like a pipeline hub or metro sta-
tion (Figure 3(c)). Hub entities have a common fea-
ture that they are not isolated in the network other-
wise they themselves form networks since they are
not connected to outside world. For example, a lake
that belongs to a river network has at least one river
stream flowing to/out from it; a pipeline hub gathers
the pipelines from different directions, process, filter,
and then transfers out gas/oil; a metro station connects
to multiple lines of traffic and public transportation
networks.
3.6 Junction3D
In spatial networks, there can be multiple pathways
that connect one point to another. Each pathway can
be a simple curve in 3D space, or a series of curves,
i.e. we can use Branch3D or more generally, Trunk3D
data type to represent a pathway. There are certain
important points in the network layout that are con-
nected with a number of pathways, we refer to those
points as junctions. A junction in a 3D network is
denoted as of type Junction3D.
The definition of a Junction3D from a geometric
perspective is
Junction3D = {J ⊂ R
3
|
∀p ∈ J,card({t | t ∈ T,∃c ∈ t, s.t. (12)
( f
c
(0) = p ∨ f
c
(1) = p)}) > 3}
where C is the set of all simple curves in R
3
. From
the definition, we require that the number of distinct
curves that connect to the junction point should be
more than three. If there are less or equal to three
curves connecting to a point, that point is not seen as
a junction in our model as it could also be an internal
point in the Branch3D object. As shown in Figure 5,
point A is not a junction as it only connects to three
curves. Similar case holds for point B. Point C and
D are junctions since they are linked with more than
three simple curves. For points with degree of three,
we name them as fork points, or forks for short. We
use J(π) to represent the set of junctions for the spatial
mapping π on-wards.
3.7 Trunk3D
After giving the definitions of branches, hubs, and
junctions, now we are able to define a more com-
plex spatial data type, Trunk3D. A collection of path-
ways between two junctions or hubs forms a bunch of
branches, which we refer to as a Trunk3D.
The formal definition of spatial data type Trunk3D
is given as
Trunk3D = {∪
n
i=1
b
i
|
(i) n ∈ N, ∀i ∈ {1,2..., n} : b
i
∈ B ∧
(ii) ∀i, j ∈ {1, 2,..., n},∀a,b ∈ (0,1), s.t.
∀c
1
∈ b
i
,c
2
∈ b
j
: f
c
1
(a) 6= f
c
2
(b) ∧
(iii) ∀i, j ∈ {1, 2,..., n},∀a ∈ (0,1), ∀b ∈ {0,1},
s.t. ∀c
1
∈ b
i
,c
2
∈ b
j
: (13)
f
c
1
(b) 6= f
c
2
(a) ∧ f
c
2
(b) 6= f
c
1
(a) ∧
(iv) ∀p ∈ ∂t, t is a Trunk3D,
(∃b ∈ B, s.t. p ∈
¯
b ∧ b /∈ t) ∨ (p ∈ J(π))∨
(∃h ∈ HUB3D, s.t. p ∈ ∂h) ∨ (p ∈ λ(π))}
where B is the set of branches in R
3
. Recall that
two curves that belong to one branch meet each other
if they have only one shared end point. However, we
lift this constraint in defining Trunk3D. As in con-
dition (ii) and (iii), all branches are required to not
intersect with each other if they belong to the same
trunk, but they are allowed to formulate loops. Con-
dition (iv) states that for any end points of the trunk,
GISTAM 2016 - 2nd International Conference on Geographical Information Systems Theory, Applications and Management
150

they have to either touch or meet the other branch, or
they belong to the boundary of a hub, or they are junc-
tions, or they belong to the boundaries of the network,
which is denoted by λ(π). ∂Trunk3D represents the
boundary of the trunk.
Hub3D
Trunk3D
Trunk3D
Trunk3D
Trunk3D
Trunk3D
Junction
Split
Merge
Figure 4: Examples Trunk3D’s.
Examples of Trunk3D’s are shown in Figure 4.
In Figure 4(a), the branches originated from the hub
object form a single Trunk3D object. We call the
points that a Trunk3D touches a Hub3D as estuary
points. Figure 4(b) depicts a junction in a road net-
work. The two roads that intersect at this junction
are modeled into four pieces of Trunk3D’s. Hav-
ing the Trunk3D definition is important to precisely
model the geometrical aspects of spatial networks.
For example, in a pipeline network, between two in-
terchange stations, there can be multiple pipelines
connecting them. These pipelines are usually parallel
to each other and do not intersect each other. Since
their start points coincide, and end points also coin-
cide, it is impossible to model these lines as a nor-
mal Line3D object Schneider (1997) or a Branch3D
object. Another example is in road networks. For a
highway or an interstate, it usually consists of mul-
tiple lanes. In our abstract model, we use data type
Branch3D to model the lanes. Lanes can merge or
split, but if we treat each lane as an individual branch,
the topological relationships of these branches are that
they do not intersect each other. We treat those lanes
as a new type of spatial data type, i.e. Trunk3D. In
addition, in road networks, we model junctions (such
as the locations of traffic lights) as points, therefore
the lanes that connect with junctions are constricted
to meet at junctions and then spread out again (Fig-
ure 4(b)).
Figure 5: Examples and Counter-examples of Junction3D’s.
Let T be the set of all Trunk3D’s in R
3
. For a
trunk t = {∪
n
i=1
b
i
} ∈ Trunk3D where b
i
∈ B, the topo-
logical notations of this trunk is defined as: (1) Let
E(t) = ∪
n
i=1
∂b
i
= ∪
n
i=1
∪
m
j=1
e(c
b
i
j
), note that we need
to exclude the internal end points from E(t) to for-
mulate the boundary of t. Therefore, ∂t = E(t) −
{p ∈ E(t) | ∀c ∈ C, ¬∃b ∈ t, s.t. c ∈ b ∧ ( f
c
(0) =
p ∨ f
c
(1) = p)}; (2) The interior of the trunk in-
cludes all points from all belonging branches except
for boundary points, i.e. t
o
= t − ∂t; (3) The closure
of the trunk is
¯
t = ∂t ∪ t
o
= t; (4) The exterior of the
trunk is then defined as t
−
= R
3
− t since R
3
is the
embedding space.
3.8 Snet3D
With all previous definitions of different components
of the network, now we give the formal definition of
the spatial network data type, Snet3D.
The spatial data type Snet3D for spatial networks
is defined as
Snet3D = {S ⊂ R
3
|
∀u ∈ S,∃v = u, s.t. v ∈ HUB3D ∨ v ∈ T } (14)
where HUB3D is the set of hubs, and T is the set
of trunks. The definition states that for any point that
belongs to the spatial network in 3D space, it should
either belong to any hubs or trunks in the network.
Geometrically, S = HU B3D ∪ T .
For a spatial network s, the topological notations
are specified as follows: (1) The boundary of s is de-
fined as ∂s = ∂HU B3D ∪ ∂T = (∪
i
∂h
i
) ∪ (∪
j
∂t − J −
{p | ∃h ∈ HUB3D,∃t ∈ T, s.t. p ∈ ∂h ∧ p ∈ ∂t}),
which is the union of the boundary of all hubs and
trunks excluding junctions and estuary points; (2) The
interior of s is then defined as s
o
= s−∂s; (3) The clo-
sure of a spatial network s is ¯s = s
o
∪ ∂s = s; (4) The
exterior of s is defined as s
−
= R
3
− s.
Finally, we give the structural definition of spatial
networks . Let A be the label type, and π be the spatial
mapping
interior : π
o
= ∪
{s∈γ(π)|π[s]6=⊥}
s}; (15)
boundary : ∂π = ∪
b∈ω(π)
b}; (16)
exterior : π
−
=π
−1
({⊥}) = ∪
{s∈γ(π)|π[s]=⊥}
s}. (17)
Recall from (1)(2) that the areas of π is defined as
γ(π) = π
−1
(rng(π) ∩ {X ∈ 2
A
| card(X) = 1}) and the
borders of π is defined as ω(π) = π
−1
(rng(π) ∩ {X ∈
2
A
| card(X ) > 1}). The interior of π (formula (18))
is defined as the union of π’s areas. The boundary of
π (formula (19)) is defined as the union of the borders
of π. And the exterior of π is the block mapped to ⊥.
SNAL: Spatial Network Algebra for Modeling Spatial Networks in Database Systems
151

4 CONCLUSIONS AND FUTURE
WORK
In this paper, we proposed an abstract model of spatial
networks. This model is based on point set theory
and topology that offers a formal data type definition
of spatial networks in the form of spatial mapping.
The model provides rich details that are generic to all
kinds of spatial networks.
Future work includes the completion of the ab-
stract model with a comprehensive set of spatial net-
works operations and predicates. These operations
and predicates along with the data types definitions
form the foundation of the type system of spatial
networks. The only trouble with abstract models is
that we cannot store and manipulate them in com-
puters. The challenge of representing and storing ab-
stract spatial data types is addressed by the next level
of modeling: discrete modeling. We can view dis-
crete models as approximations, finite descriptions of
the infinite shapes we are interested in. In spatial
databases there is the same problem of giving discrete
representations for in principle continuous shapes Er-
wig et al. (1998); there almost always linear approxi-
mations have been used. Hence, a region is described
in terms of polygons and a curve in space (e.g. a river)
by a polyline. Linear approximations are attractive
because they are easy to handle mathematically; most
algorithms in computational geometry work on linear
shapes such as rectangles, polyhedra, etc.
Based on the finite representation, an implementa-
tion of the proposed spatial network model is the next
step. In particular, an implementation in a database
context is expected. Additionally, an extension of
SQL query language is to be designed and imple-
mented to support querying of the spatial networks.
REFERENCES
Brinkhoff, T. (2002). A framework for generating network-
based moving objects. In Geoinformatica, volume 6,
pages 153–180.
Ding, Z., Yang, B., G
¨
uting, R., and Li, Y. (2015). Network-
matched trajectory-based moving-object database:
Models and applications. IEEE Transactions on In-
telligent Transportation Systems, Article in press.
Dugundi, J. (1966). Topology. Allyn and Bacon.
Egenhofer, M. J. and Herring, J. (1990). Categorizing bi-
nary topological relations between regions, lines, and
points in geographic databases. In for Geographic In-
formation, N. C. and Analysis, University of Califor-
nia, S.B.S.B. C., editors, Tech. rep.90-12.
Erwig, M., G
¨
uting, R. H., Schneider, M., and Vazirgian-
nis, M. (1998). Abstract and discrete modeling of
spatio-temporal data types. In 6th ACM Symp. on Ge-
ographic Information Systems(ACM GIS), pages 131–
136
Erwigm, M. and G
¨
uting, R. (1994). Explicit graphs in
a functional model for spatial databases. Knowl-
edge and Data Engineering, IEEE Transactions on,
6(5):787–804.
Gupta, S., Kopparty, S., and Ravishankar, C. (2004). Roads,
codes, and spatiotemporal queries. In Proceedings
of the 23rd ACM SIGMOD-SIGACT-SIGART Sympo-
sium on Principles of Database Systems, pages 115–
124.
G
¨
uting, R. (1994). Graphdb: Modeling and querying
graphs in databases. In 20th Int. Conf. on Very Large
Databases, pages 297–308.
G
¨
uting, R., Almeida, V., and Ding, Z. (2006). Modeling and
querying moving objects in networks. In The VLDB
Journal, volume 15, pages 165–190.
Jensen, C., Pedersen, T., Speicys, L., and Timko, I. (2003).
Data modeling for mobile services in the real world.
In Int. Conf. on Advances in Spatial and Temporal
Databases, pages 1–9.
Jeung, H., Yiu, M., Zhou, X., and Jensen, C. (2010). Path
prediction and predictive range querying in road net-
work databases. In The VLDB Journal, volume 19,
pages 585–602.
Krogh, B., Pelekis, N., Theodoridis, Y., and Torp, K.
(2014). Path-based queries on trajectory data. In
22nd ACM SIGSPATIAL Int. Conf. on Advances in
Geographic Information Systems (ACM SIGSPATIAL
GIS).
Liu, H. and Schneider, M. (2010). Detecting the topological
development in a complex moving region. Journal
of Multimedia Processing and Technologies (JMPT),
1(3):160–180.
McKenney, M. and Schneider, M. (2007). Spatial partition
graphs: A graph theoretic model of maps. In Advances
in Spatial and Temporal Databases, pages 167–184.
Springer.
Miller, H. and Shaw, S. (2001). Geographic Information
Systems for Transportation. Oxford University Press.
Popa, I. S., Zeitouni, K., Oria, V., Barth, D., and Vial, S.
(2011). Indexing in-network trajectory flows. In The
VLDB Journal, volume 20, pages 643–669.
Qi, L. and Schneider, M. (2012). Monet: Modeling and
querying moving objects in spatial networks. In 3rd
ACM SIGSPATIAL Int. Workshop on GeoStreaming
(IWGS).
Qi, L., Zhang, H., and Schneider, M. (2015). Design
and representation of complex objects in database
systems. In 23rd ACM SIGSPATIAL Int. Conf. on
Advances in Geographic Information Systems (ACM
SIGSPATIAL GIS).
Scheider, S. and Kuhn, W. (2008). Road networks and
their incomplete representation by network data mod-
els. In GIScience ’08: Proceedings of the 5th Inter-
national Conference on Geographic Information Sci-
ence, pages 290–307.
Schneider, M. (1997). Spatial Data Types for Database Sys-
tems - Finite Resolution Geometry for Geographic In-
formation Systems. LNCS 1288, Springer-Verlag.
GISTAM 2016 - 2nd International Conference on Geographical Information Systems Theory, Applications and Management
152
