
Traffic Stream Short-term State Prediction using Machine Learning
Techniques
Mohammed Elhenawy, Hesham Rakha and Hao Chen
Virginia Tech Transportation Institute, 3500 Transportation Research Plaza, Blacksburg, VA 24061, U.S.A.
Keywords: Transportation Planning and Traffic Operation, Real-time Automatic Congestion Identification,
Mixture of Linear Regression, ITS.
Abstract: The paper addresses the problem of stretch wide short-term prediction of traffic stream state. The problem is
a multivariate problem where the responses are the speeds or flows on different road segments at different
time horizons. Recognizing that short-term traffic state prediction is a multivariate problem, there is a need to
maintain the spatiotemporal traffic state correlations. Two cutting-edge machine learning algorithms are used
to predict the stretch-wide traffic stream traffic state up to 120 minutes in the future. Furthermore, the divide
and conquer approach was used to divide the large prediction problem into a set of smaller overlapping
problems. These smaller problems are solved using a medium configuration PC in a reasonable time (less
than a minute), which makes the proposed technique suitable for practical applications.
1 INTRODUCTION
Nowadays, due to the technology advances, the
intelligent transportation systems (ITS) are widely
deployed in many countries to manage the
transportation resources and solve traffic problems.
Advanced traffic management systems (ATMS) and
advanced traveller information systems (ATIS) are
two ITS’s components that are mainly involved in
relaxing traffic congestion and decreasing travel time.
The ATMS collect real-time traffic data using
different sensing devices such as cameras and speed
sensors. These collected data are fed to the Traffic
Management Center (TMC) where it is fused together
and get ready for downstream analysis and prediction.
Based on the outcome of the analysis, actions can be
taken (e.g. traffic routing, DMS messages) to avoid
congestion and decrease travel time.
Data-driven modelling is considered a good
approach to model complex traffic characteristics
when applying mathematical models that are based on
macroscopic and microscopic theories of traffic flow
is difficult. Data-driven short-term prediction of the
traffic characteristics such as flow, density and speed
has been a very important tool in ITS. The short-term
prediction is not a straightforward task because of the
unstable traffic conditions and complex road settings
(Vlahogianni et al., 2014).
During the last decades, the traffic characteristics
prediction has been studied and many prediction
approaches have been developed. The developed
prediction approaches are classified into three broad
categories; parametric models, nonparametric
models, and simulations.
Time-series techniques is a parametric model that
is used widely in traffic flow prediction. The
autoregressive integrated moving average (ARIMA)
model was used very early to predict short-term
freeway traffic flow (Ahmed and Cook, 1979). After
that, different advanced versions of ARIMA were
used to develop more accurate prediction models.
Voort et al. integrated the Kohonen self-organizing
map and ARIMA into a new method called
KARIMA(Van Der Voort et al., 1996). KARIMA
uses a Kohonen self-organizing map to cluster the
data and then model each cluster using ARIMA. Lee
et al. used subset ARIMA model for the one-step-
ahead forecasting task which gave more stable and
accurate results than the full ARIMA model (Lee and
Fambro, 1999).
Due to both the highly nonlinear nature of traffic
characteristics and availability of data, nonparametric
methods attracted the researchers’ attention. In the
traffic flow prediction area, there are many versions
of K-NN algorithm that showed a good prediction
accuracy. Davis and Nihan argue that K-NN can
capture linear and nonlinear relationships therefore it
124
Elhenawy, M., Rakha, H. and Chen, H.
Traffic Stream Short-term State Prediction using Machine Learning Techniques.
In Proceedings of the International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2016), pages 124-129
ISBN: 978-989-758-185-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
is able to model the nonlinear transition between free-
flow and congested traffic(Davis and Nihan, 1991).
However, the results of their empirical study
showed that K-NN is not better than a simple
univariate time-series forecasts. Sun et al. considered
the traffic prediction model as a non-linear system
which has historical and current traffic characteristics
as inputs and its output is the future traffic
characteristics(Sun et al., 2003). Therefore, they used
the local linear regression model to approximate the
nonlinear relationship between system inputs and
outputs and to predict future traffic characteristics.
Young-Seon et al. proposed a short-term traffic flow
predictions algorithm that combines the online-based
SVR with weighted learning method for short-term
traffic flow predictions (Young-Seon et al., 2013).
ANN is considered one of the best tools to model
highly non-linear relationship between inputs and
outputs so that there are many papers that adopted
many ANN models for predicting traffic flow such as
the Bayesian neural network (Zheng et al., 2006) and
radial basis function neural network(Park et al.,
1998). Interested readers are recommended to read
(Vlahogianni et al., 2014) for a good review of the
proposed techniques and challenges of short-term
prediction.
2 PROBLEM STATEMENT
In this Paper, we are interested in the short-term
prediction of stretch-wide speed/flow. The evolution of
traffic state is a complex spatiotemporal process. In
order to define our prediction problem, we first define
the spatiotemporal state matrix
, where is the
number of the stretch’s segments and is the day’s
time intervals. The traffic state prediction problem can
be stated as follows. Let
be the observed elements
of the spatiotemporal traffic state matrix at the time
interval = 1,2,…,
and segment = 1,2,…,ℎ of
the studied road stretch. Our goal is to predict the
spatiotemporal traffic state submatrix that spans the
time interval [
+1,
+∆] for some prediction
horizon∆, given the spatiotemporal observed traffic
state submatrix that ends at time
, the forecasted
weather condition, and the visibility level.
The problem state above has the general solution
form shown in equation (1);
∆
=
,
,Θ+
∆
(1)
Where
The chosen model
∆
The response at some prediction horizon
∆
The inputs predictors which includes the
observed elements of the spatiotemporal
traffic state submatrix at the time interval
Θ
Estimated model parameters
∆
Errors (unexplained variability) because
of absence of the factors that we cannot
observe
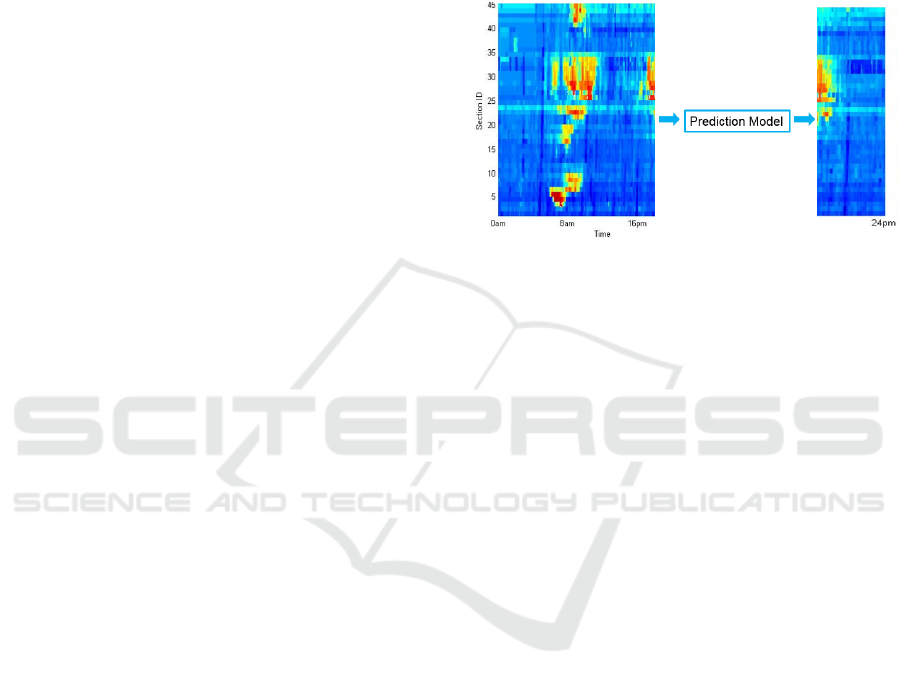
Figure 1: Prediction Model. Illustration of problem where
model is needed to predict the traffic state evolution in time
(x-axis) and space (y-axis).
2.1 Why Machine Learning is the
Suitable Framework
Machine learning techniques are suitable models for
this problem for three reasons. First is the stochastic
nature of the input-output data where it is possible to
find two different responses for the same input. In
other words, the response corresponding to any input
predictors is a distribution rather than a single point
in the response space. Second, the problem is
multivariate and the relationships between variables
are nonlinear. Third, there is no closed mathematical
form (model) that can be used to explain the
relationship between the input predictors and the
response.
3 METHODS
3.1 Partial Least Squares Regression
(PLSR)
Multiple linear regression (MLR) is generally a good
tool for modelling the relationship between predictors
and responses. In many scientific problems, the
relationship between the predictors and responses are
poorly understood, and the main goal is to construct a
good predictive model using a large number of
predictors. MLR is effective when the number of
predictors is small, there is no significant
Traffic Stream Short-term State Prediction using Machine Learning Techniques
125

multicollinearity, and there is a well-understood
relation between predictors and responses (Abdi).
However, if the number of predictors gets too large,
an MLR model will over-fit the sampled data
perfectly but fail to predict new data well.
Accordingly, in this case, MLR is not a suitable tool.
PLSR is a recently developed technique that
generalizes and combines features from principal
component analysis and MLR. It is used to predict Y
from X and to describe their common structure. PLSR
assumes that there are only a few latent factors that
account for most of the variation in the response. The
general idea of PLSR is to try to extract those latent
factors, accounting for as much of the predictors’ X
variation as possible, and at the same time to model
the responses well.
3.2 Artificial Neural Networks (ANN)
In machine learning, artificial neural networks (ANN)
are used to estimate or approximate unknown linear
and non-linear functions that depend on a large
number of inputs. Artificial neural networks can
compute values or return labels using inputs.
An ANN consists of several processing units,
called neurons, which are arranged in layers. We used
the multi-layered feed-forward ANN, in which the
neurons are connected by directed connections, which
allow information to flow directionally from the input
layer to the output layer. A neuron k at layer
receives an input x
from each neuron j at layer m−
1. The neuron adds the weighted sum of its inputs to
a bias term. The whole thing is then applied to a
transfer function and the result is passed to its output
toward the downstream layer.
3.3 Principal Component Analysis
(PCA)
The stretch-wide prediction problem is a multivariate
problem that may involve a considerable number of
correlated predictors. PCA is a popular technique for
dimensionality reduction that linearly transforms
possibly correlated variables into uncorrelated
variables called principal components.
PCA is usually used to reduce the number of
predictors involved in the downstream analysis;
however, the smaller set of transformed predictors
still contains most of the information (variance) in the
large set. The principal components are the
Eigenvectors of the dataset covariance matrix. The
first principal component is the normalized
Eigenvector, which is associated with the highest
Eigenvalue. The first principal component represents
the direction in the space that has the most variability
in the data, and each succeeding component accounts
for as much of the remaining variability as possible.
4 MODEL CALIBRATION
4.1 Divide and Conquer Approach
The big challenges to stretch-wide traffic state short-
term prediction are the large dimension of the
predictors and responses vectors and the huge number
of parameters required for estimation. Once the road
stretch grew to a certain point, most of the machine-
learning algorithms we usually used either required
too much time for training or suffered from memory
problems. To handle these issues, a divide and
conquer approach model was adopted in this study.
A divide and conquer paradigm suggests that if
the problem cannot be solved as is, it should be
decomposed it into smaller parts, and these smaller
parts then solved. A divide and conquer algorithm
breaks down a problem into two or more smaller
problems of the same type. The final solution to the
larger, more difficult problem is the combination of
the smaller problems’ solutions. Divide and conquer
is applied in a straightforward manner to our
prediction problem by dividing the inputs predictors
of the spatiotemporal speed or flow matrix into
smaller overlapping windows and then doing the
same with the responses. The overlap of the windows
is important if we need to get smooth predicted
responses. Because of this overlap between windows,
each segment has two predicted speeds/flows at the
testing phase, and the final predicted speed/flow for
overlapped segments is the average.
4.2 Training and Testing Phase
Typically, in machine learning, the model calibration
process consists of a training phase and a testing
phase. In the training phase, the model parameters are
estimated using the training dataset. In the testing
phase, the constructed models’ accuracy is tested
using an unseen dataset called the testing dataset.
The training phase in our approach includes the
following steps:
1. Partitioning (dividing) the whole stretch into
small windows, which each have a small
number of segments.
2. Preparing the and matrices for each
window by reshaping the traffic state, weather,
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
126
and visibility inside the windows, which have
widths of ℎ and respectively.
3. Shifting the window to the right and repeating
step 2 to get another raw and .
4. Applying the machine learning algorithm to the
, matrices to get the model parameter such as
the Coefficient matrix in the case of PLSR.
The testing phase is always simpler and does not
need large time. For example, it includes multiplying
the testing data by the matrix of the PLSR coefficient
or passing the testing data through the neural network
after reducing it using the same principal components.
The last step in testing is collecting the predicted pieces
together to get the prediction for the whole stretch.
5 EXPERIMENTAL ANALYSIS
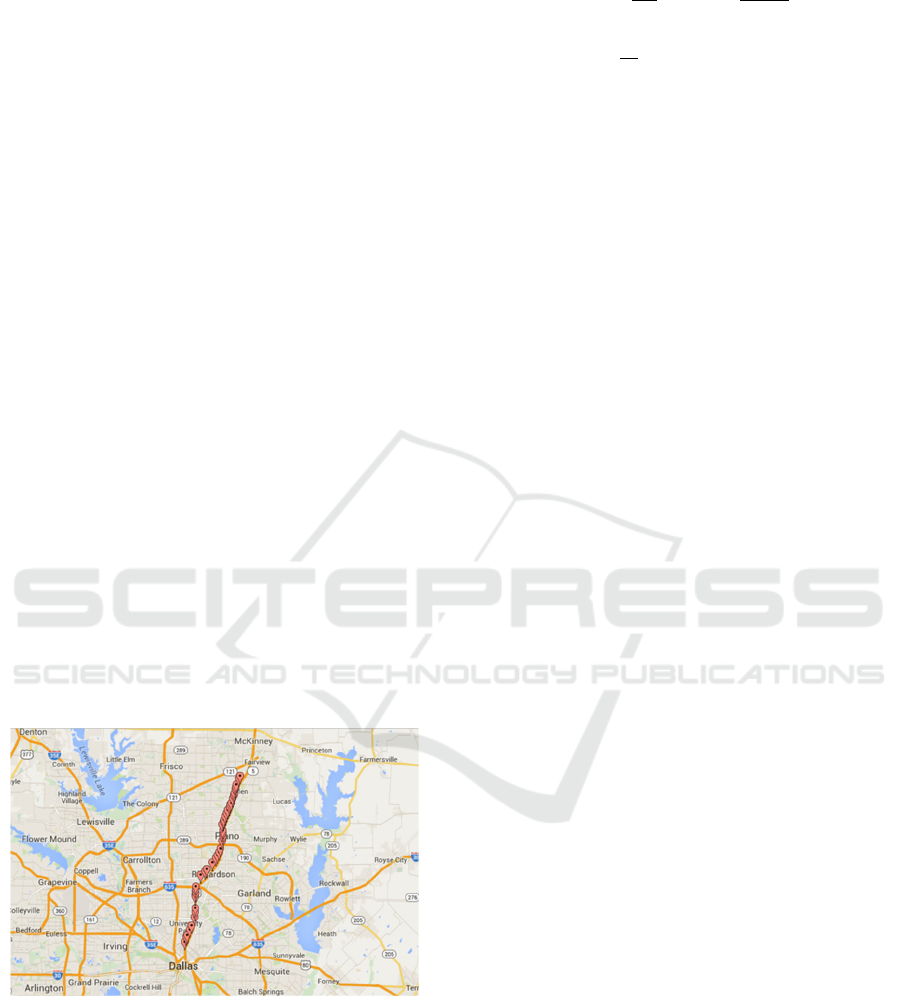
5.1 Study Site
Traffic speed and flow from loop detectors are used
to develop the proposed prediction models.
Specifically, the study included 2013~2014 data
along US-75 northbound as shown in Figure 2. This
road segment includes 42 loop detectors along 23.3
miles. In order to reduce the stochastic noise and
measurement error, raw speed data were aggregated
by 5-minute intervals and 15-minutes interval.
Therefore, the traffic speed and flow matrices over
spatial (upstream to downstream) and temporal
domains could be obtained for each day.
Figure 2: Layout of the Selected Freeway Stretch on US-
75. (Source: Google Maps).
5.2 Evaluation Criteria
The mean absolute percentage error (MAPE) and the
mean absolute error (MAE) were calculated for the
different proposed algorithms
MAPE =
∑∑
(2)
MAE =
∑∑
y
−
y
(3)
Where
J = total number of observations in the testing data
set,
I = total number of elements in each observation,
y = ground truth traffic state, and
y = predicted traffic state.
5.3 Investigating the Effect of Window
Size on Prediction Errors
Our method for solving the wide stretch prediction
problem is based on a divide and conquer approach,
which requires fine-tuning the window size . In
this section, we perform a sensitivity analysis of the
parameter in the divide and conquer approach. We
compare the performance of the PLSR and
PCA+ANN for different values.
The ANN is a suitable technique for the stretch-
wide prediction and its performance is close to
PLSR’s performance as will be shown; however, its
training time is significantly larger compared to
PLSR. In this section, to overcome the training time
problem, we adopted the PCA as the dimension
reduction technique. PCA is used to transform the
training predictors’ matrix and use the subspace
consisting of the principal components with the most
variance. In this paper we use the PCA to reduce the
dimension of input data to 50% of its original size.
Using PCA would also fix the multicollinearity
problem if it existed. Moreover, we used the 15-
minutes aggregated data with the PCA+ANN where
using 5-minutes aggregated with this approach is very
time-consuming and therefore impractical. The
neural network used in this experiment has only one
hidden layer which has 9 neurons. The activation
function of the hidden neurons is Tanh and the
activation function of the output layer is linear. In this
experiment set we used the 5-minutes aggregated data
when finding the best window size when using PLSR
algorithm to build the prediction model. The
experimental results show that as we increase the
window size, the errors are reduced. Moreover, the
divide and conquer approach using w=32 is the best
approach, and is slightly better than the model that
does not use divide and conquer.
We investigate the effect of the window size using
ANN+PCA and as shown in Table 1, as we increase
the window size, the errors are almost the same at
small prediction horizon and are increased at
Traffic Stream Short-term State Prediction using Machine Learning Techniques
127

Table 1: The mean of MAPE (%) of the Us-75 flow dataset (15-minute aggregated) using ANN+PCA at different window
size.
Prediction
horizon (minutes)
window size 2 window size 4 window size 8 window size 16 window size 32
15
30
45
60
75
90
105
120
11.0840
12.5249
12.0642
12.6834
13.2808
13.8105
13.7811
13.9212
11.3875
11.6274
12.4716
12.6261
13.0412
13.3066
13.5860
13.9483
10.8014
11.8170
12.3469
12.7570
13.2466
13.5227
13.7143
14.0594
10.9167
11.6387
12.6305
13.4120
13.6641
14.0085
14.3569
14.5721
10.6331
11.7886
12.5065
12.7703
13.7153
14.5708
14.2725
14.8917
prediction horizon greater than or equal 90 minutes.
So that we set up the window size equals to four when
using ANN+PCA. In order to explain why the errors
increases as the window size increase recall that large
window means large neural network and large
number of free parameters (coefficients and biases).
Network with large number of parameters is more
prone to overfitting so that network validation process
stops the network training when there is no
improvement in the neural network cost function
during validation phase. One solution to overcome
this problem is increasing the training dataset witch is
not feasible in our case.
5.4 Error Reduction by Result
Averaging
The results in the previous section show that the best
window size for PLSR is 32; however, the MAE and
MAPE are still large. For example, the MAPE for two
hours of prediction is 23.34% .We visually inspected
the speed and flow patterns of the five minutes
aggregated data and observed two types of variations.
The first variation has a low frequency that describes
the differences in flow or speed at free flow and
congestion conditions, which are exactly the types of
conditions we need to predict. The second variation
has a high frequency and can be removed by filtering
(smoothing) the speed or flow signal. We tried two
approaches to improving prediction. The first
approach involves smoothing the data itself by using
15-minutes aggregated data instead of 5 to train and
test the proposed PLSR. The second approach
involved using the five minutes aggregated data to
build the PLSR models and then smoothing the
prediction result. In other words, we averaged the
predicted result to get 15-minutes of aggregated
prediction. Due to the limited space in this paper, in
the following subsection, we will present only two
figures showing the experimental results.
Figure 3: Comparison between the MAE (Vehicle per hour)
of the Us-75 flow dataset.
Figure 4: Graph Comparison between the MAE (MPH) of
the Us-75 speed dataset.
The figures above show that smoothing the data
by reducing its resolution to 15 minutes results in a
lower MAE and MAPE rate compared to the 5
minutes aggregated data. This reduction in the errors
is very good for the ANN+PCA case but not as good
for the PLSR case. In the case of the second approach,
which trains and the tests the PLSR models using five
minutes aggregated data and then smooths the
prediction results, the reductions in MAE and MAPE
are good. .In conclusion, ANN+PCA gives a better
result than PLSR when the training data is 15 minutes
aggregated. If the data is 5 minutes aggregated, then
using PLSR to build the models and smoothing the
prediction result is recommended.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
128

6 CONCLUSIONS AND FUTURE
WORK
In this paper, two machine-learning techniques were
used to predict the spatiotemporal evolution of traffic
stream states. A divide and conquer approach was
proposed to overcome the CPU computational and
memory loads that occur for a large road stretch and
large prediction horizons. The two techniques were
compared by building prediction models for a 23.3-
mile stretch of US-75. The models were compared
using the MAE and the MAPE statistics. In order to
reduce the training time needed for ANNs, PCA was
used to reduce the problem dimensionality using 50%
of the principle components to cover almost all the
variance in the data.
A sensitivity analysis was conducted to identify
the optimum window size in the divide and conquer
technique using the PLSR & ANN+PCA approaches.
The experimental results showed the best window
size to be 32 segments for PLSR; and 4 segments for
the ANN+PCA because it reduces the ANN
overfitting problem. Data aggregated at 5-minute and
15-minute intervals were used and the experimental
results show that the ANN+PCA performed better
than the PLSR approach when the 15-minute data the
PLSR performed better. In the case of 5-minute
aggregated data training, the ANN approach was
found to be time consuming, rendering it impractical.
We should mention that the models proposed in
this paper do not consider the response of travellers if
the agencies operating the network disseminate
predicted traffic information were sent to them. One
area for future work is studying the interaction of the
informed traveller and including the travellers’
response as an input factor to the prediction models.
Another area for future work is network-wide traffic
prediction, for which models to predict the traffic on
different roadway segments in a network. For the
network-wide prediction, we can make use of newly
available technologies along with new big data
techniques to integrate travel behaviour and enhance
traffic predictions. Moreover, the traffic patterns
inside cities are dynamic and change over time, so
online learning algorithms that continue to learn from
each test (unseen example) in order to capture the
dynamics of the traffic patterns are also needed.
REFERENCES
Abdi, H. Partial Least Square Regression (Pls Regression).
Ahmed, M. S. & Cook, A. R. 1979. Analysis Of Freeway
Traffic Time-Series Data By Using Box-Jenkins
Techniques.
Davis, G. A. & Nihan, N. L. 1991. Nonparametric
Regression And ShortTerm Freeway Traffic
Forecasting. Journal Of Transportation Engineering.
Lee, S. & Fambro, D. 1999. Application Of Subset
Autoregressive Integrated Moving Average Model For
Short-Term Freeway Traffic Volume Forecasting.
Transportation Research Record: Journal Of The
Transportation Research Board, 179-188.
Park, B., Messer, C. & Urbanik Ii, T. 1998. Short-Term
Freeway Traffic Volume Forecasting Using Radial
Basis Function Neural Network. Transportation
Research Record: Journal Of The Transportation
Research Board, 39-47.
Sun, H., Liu, H., Xiao, H., He, R. & Ran, B. 2003. Use Of
Local Linear Regression Model For Short-Term Traffic
Forecasting. Transportation Research Record: Journal
Of The Transportation Research Board, 143-150.
Van Der Voort, M., Dougherty, M. & Watson, S. 1996.
Combining Kohonen Maps With Arima Time Series
Models To Forecast Traffic Flow. Transportation
Research Part C: Emerging Technologies, 4, 307-318.
Vlahogianni, E. I., Karlaftis, M. G. & Golias, J. C. 2014.
Short-Term Traffic Forecasting: Where We Are And
Where We’re Going. Transportation Research Part C:
Emerging Technologies, 43, Part 1, 3-19.
Young-Seon, J., Young-Ji, B., Mendonca Castro-Neto, M.
& Easa, S. M. 2013. Supervised Weighting-Online
Learning Algorithm For Short-Term Traffic Flow
Prediction. Intelligent Transportation Systems, Ieee
Transactions On, 14, 1700-1707.
Zheng, W., Lee, D.-H. & Shi, Q. 2006. Short-Term
Freeway Traffic Flow Prediction: Bayesian Combined
Neural Network Approach. Journal Of Transportation
Engineering, 132, 114-121.
Traffic Stream Short-term State Prediction using Machine Learning Techniques
129
