
Performance Analysis of an OpenStack Private Cloud
Tamas Pflanzner
1
, Roland Tornyai
1
, Balazs Gibizer
2
, Anita Schmidt
2
and Attila Kertesz
1
1
Software Engineering Department, University of Szeged, Dugonics ter 13, 6720 Szeged, Hungary
2
Ericsson Hungary, Konyves Kalman krt. 11, 1476 Budapest, Hungary
Keywords:
Cloud Computing, Performance Analysis, OpenStack.
Abstract:
Cloud Computing is a novel technology offering flexible resource provisions for business stakeholders to
manage IT applications and data responding to new customer demands. It is not an easy task to determine
the performance of the ported applications in advance. The virtualized nature of these environments always
represent a certain level of performance degradation, which is also dependent on the types of resources and
application scenarios. In this paper we have set up a performance evaluation environment within a private
OpenStack deployment, and defined general use cases to be executed and evaluated in this cloud. These test
cases are used for investigating the internal behavior of OpenStack in terms of computing and networking
capabilities of its provisioned virtual machines. The results of our investigation reveal the performance of
general usage scenarios in a local cloud, give an insight for businesses planning to move to the cloud and
provide hints where further development or fine tuning is needed in order to improve OpenStack systems.
1 INTRODUCTION
Cloud Computing is a diverse research area, its
novel technology offers on-demand access to com-
putational, infrastructure and data resources operated
remotely. This concept has been initiated by com-
mercial companies to allow elastic construction of
virtual infrastructures, and its technical motivation
has been introduced in (Buyya et al., 2009)(Vaquero
et al., 2008). Cloud solutions enable businesses to
outsource the operation and management processes
of IT infrastructure and services, therefore their ap-
plicants can concentrate on their core competencies.
Nevertheless it is not an easy task to determine the
performance of the ported applications in advance.
The virtualized nature of these environments always
represent a certain level of performance degradation,
which is also dependent on the types of resources used
and application scenarios applied.
In this paper we have set up a performance evalu-
ation environment using Rally (Ishanov, 2013) within
a private Mirantis (Mirantis, 2015b) OpenStack de-
ployment, and defined general use cases to be exe-
cuted and evaluated in this local cloud. The main
contributions of this paper are (i) the automated Rally
performance evaluation environment, and (ii) the pre-
defined set of test cases used for investigating the in-
ternal behavior of OpenStack in terms of computing
and networking capabilities of its provisioned virtual
machines. The results of our investigation reveal the
performance of general usage scenarios in a private
cloud, give an insight for business stakeholders plan-
ning to move to the cloud and provide hints where
further development is needed in OpenStack.
The remainder of this paper is as follows: Section
2 gives an overview of the related works, and Section
3 introduces the installation of our private cloud. Sec-
tion 4 defines the test cases and presents their evalua-
tion. Finally, Section 5 concludes the paper.
2 RELATED WORK
Cloud monitoring is closely related to benchmark-
ing, and nowadays it is a widely studied research
area and several solutions have emerged both from
the academic and commercial fields. Fatema et al.
(Fatema et al., 2014) created a survey of 21 monitor-
ing tools applicable for cloud systems. They intro-
duced the practical capabilities that an ideal monitor-
ing tool should possess to serve the objectives in these
operational areas. Based on these capabilities, they
also presented a taxonomy and analysed these mon-
itoring tools to determine their strengths and weak-
nesses. Most of these cloud monitoring tools offer
their services at the Software as a Service (SaaS) level
282
Pflanzner, T., Tornyai, R., Gibizer, B., Schmidt, A. and Kertesz, A.
Performance Analysis of an OpenStack Private Cloud.
In Proceedings of the 6th International Conference on Cloud Computing and Services Science (CLOSER 2016) - Volume 2, pages 282-289
ISBN: 978-989-758-182-3
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

that can be used to monitor third party cloud installa-
tions. To realize this, third party clouds must support
the installation and execution of SaaS agents. Many
cloud monitoring tools are capable of monitoring at
the infrastructure and application levels, while some
others can only monitor one of those levels.
Concerning cloud benchmarking, Ficco et al.
(Ficco et al., 2015) defined the roles of benchmark-
ing and monitoring of service performance in Cloud
Computing, and presented a survey on related solu-
tions. They argued that in general benchmarking tools
should be more flexible, and the usage of a single per-
formance index is not acceptable and workload defi-
nition should be customizable according to user spe-
cific needs. Leitner et al. (Leitner and Cito, 2014)
performed a benchmarking of public cloud providers
by setting up hypotheses relating to the nature of per-
formance variations, and validated these hypotheses
on Amazon EC2 and Google Compute Engine. With
this study they showed that there were substantial dif-
ferences in the performance of different public cloud
providers. Our aim is to investigate a local, private
cloud based on OpenStack.
The primary goal of the CloudHarmony (Cloud-
harmony, 2014) is to make cloud services compa-
rable, therefore they provide objective, independent
performance comparisons between different cloud
providers. Using these data, customers can quickly
compare providers and have reasonable expectations
for cloud performance. However, CloudHarmony
can only provide quantitative performance data in a
raw form produced by benchmark tools and cannot
present refined qualitative information created from
processed benchmark results.
Ceilometer (OpenStack, 2015a) is an OpenStack
project designed to provide an infrastructure to col-
lect measurements within OpenStack so that only one
agent is needed to collect the data. The primary tar-
gets of the project are monitoring and metering, but
the framework can be extended to collect usage for
other needs. Rally (Ishanov, 2013) is a more advanced
solution for benchmarking and profiling OpenStack-
based clouds. Its tools allow users or developers to
specify some kind of synthetic workload to stresstest
OpenStack clouds and get the low-level profiling re-
sults. Rally is able to collect monitored information
about executing specific scenarios, like provisioning
a thousand virtual machines (VM), and shows how a
cloud performs on average in that environment. Since
cloud operators typically do not run user workloads,
therefore Rally provides an engine that allows devel-
opers to specify real-life workloads and runs on ex-
isting OpenStack clouds. The results generated from
these kinds of benchmarks are more high level, but
they allow users to identify bottlenecks on a specific
cloud. In our work we used and extended Rally sce-
narios to benchmark our private cloud.
3 SETTING UP A PRIVATE
CLOUD BASED ON OpenStack
OpenStack (OpenStack, 2015c) is a global collabora-
tion of developers and cloud computing technologists
producing the ubiquitous open source cloud comput-
ing platform for public and private clouds. It aims
to deliver solutions for all types of clouds by being
simple to implement, massively scalable, and feature
rich. The technology consists of a series of inter-
related projects delivering various components for a
cloud infrastructure solution. It has 13 official dis-
tributions (OpenStack, 2015b), and we have chosen
Mirantis (Mirantis, 2015b) for the base distribution of
our private cloud, since it is the most flexible and open
distribution of OpenStack. It integrates core Open-
Stack, key related projects and third party plugins to
offer community innovations with the testing, support
and reliability of enterprise software.
When calculating resources for an OpenStack en-
vironment, we should consider the resources required
for expanding our planned environment. This calcula-
tion can be done manually with the help of the exam-
ple calculation (Mirantis, 2014a) or by an automatic
tool, like the Bill of Materials calculator. The Open-
Stack Hardware Bill of Materials (BOM) calculator
(Mirantis, 2014b) helps anyone building a cloud to
identify how much hardware and which server model
they need to build compute services for a cloud. In
our case we had some dedicated resources for setting
up our planned cloud, therefore we only had to per-
form a validity check (Mirantis, 2015a) to be sure that
our hardware pool is capable of hosting an OpenStack
cloud. The parameters of our dedicated hardware are
shown in Table 1.
Mirantis consists of three main components (Mi-
rantis, 2015b): (i) Mirantis OpenStack hardened
packages, (ii) Fuel for OpenStack, and (iii) Miran-
tis Support. The hardened packages include the core
OpenStack projects, updated with each stable release
of OpenStack, and supporting a broad range of op-
erating systems, hypervisors, and deployment topolo-
gies, including support for high availability, fixes for
reported but yet not merged defects to the commu-
nity source, and Mirantis-developed packages, such
as Sahara and Murano. Fuel is a lifecycle man-
agement application that deploys multiple OpenStack
clouds from a single interface and then enables users
to manage those clouds post deployment. One can
Performance Analysis of an OpenStack Private Cloud
283
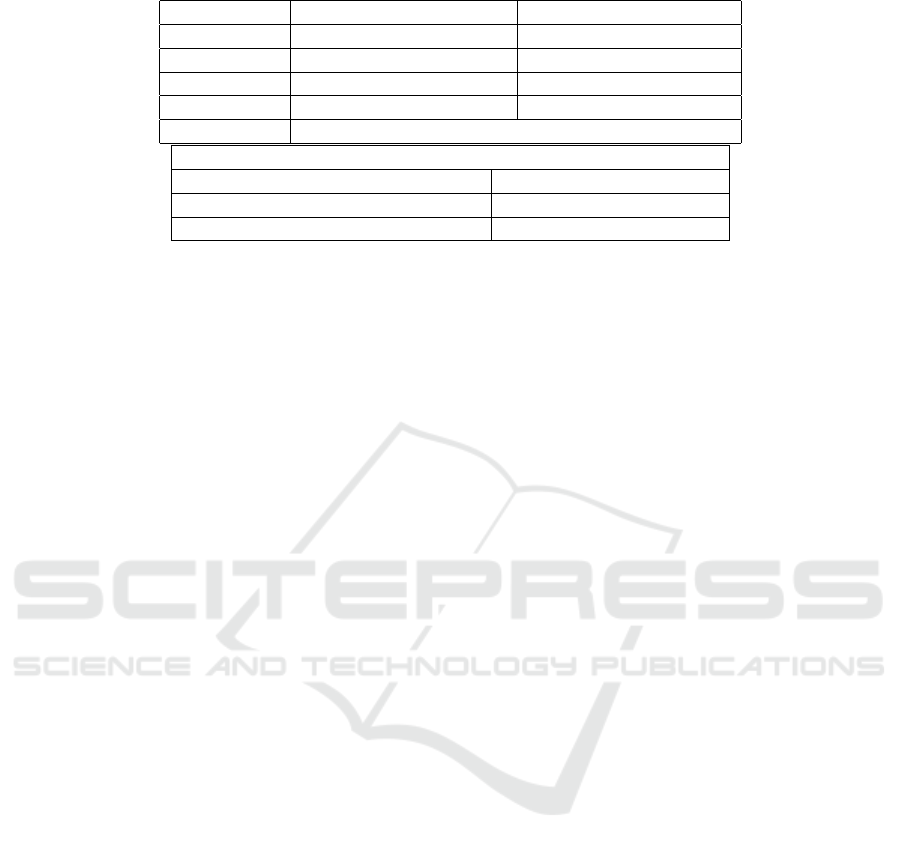
Table 1: Hardware parameters of our private OpenStack cloud.
Type 1 Type 2
System IBM BladeCenter HS21 BladeCenter LS21
CPU 8x 2.66GHz Xeon E5430 4x 2.4GHz Opt. 2216HE
RAM 4x 2GB, 8GB total 4x 1GB, 4GB total
DISK 1 drive, 68.4 GB total 1 drive, 35GB total
INTERFACE 2x 1.0 Gbps
Number of nodes by type
3x Type 1 1x Type 2
2x Type 1 + 8 GB RAM, 16 GB total 1x Type 2 + 500 GB DISK
2x Type 1 + 700 GB DISK
add nodes, remove nodes, or even remove clouds,
restoring those resources to the available resources
pool, and it also eases the complexities of network and
storage configurations through a simple-to-use graph-
ical user experience. It includes tested reference ar-
chitectures and an open library to ease configuration
changes.
An OpenStack environment contains a set of spe-
cialized nodes and roles. When planning an Open-
Stack deployment, a proper mix of node types must be
determined and selected what roles will be installed
on each, therefore each node should be assigned by a
role denoting a specific component. Fuel is capable of
deploying these roles to the nodes (Mirantis, 2015c)
of our system. The most important nodes are the fol-
lowings (Mirantis, 2015d): a Controller node initiates
orchestration activities and offers important services
like identity management, web dashboard and sched-
uler. A Compute node handles the VMs lifecycle and
includes the nova-compute service that creates, man-
ages and terminates virtual machine instances. Con-
sidering storage nodes, Cinder LVM is the default
block storage backend for Cinder and Glance com-
ponents (OpenStack, 2015e). Block storage can be
used for database storage, expandable file system or
providing a server with access to raw block level de-
vices. Ceph is a scalable storage solution that repli-
cates data across the other nodes, and it supports both
object and block storage. The absolute minimum re-
quirement for a highly-available OpenStack deploy-
ment is to allocate 4 nodes: 3 Controller nodes, com-
bined with storage, and 1 Compute node. In produc-
tion environments, it is highly recommended to sepa-
rate storage nodes from controllers to avoid resource
contention, isolate failure domains, and to be able to
optimize hardware configurations for specific work-
loads.
To start the deployment process, we created some
initial cloud installations with different configura-
tions, in which we did not use all the available ma-
chines dedicated for our private cloud. These dif-
ferent configurations aimed at both non-HA and HA
systems, and we experimented with different network
topologies like the basic nova-network flat DHCP
and neutron with GRE segmentation. We also de-
ployed the first environments with the default LVM
storage, but later we switched to Ceph. Once we
arrived to a reliable distribution of components, we
created a short documentation about the configura-
tion of our planned cloud system, and shared it with
our colleagues at Ericsson. In order to arrive to a
more enterprise-like cloud deployment, we changed
the network settings to separate the management net-
work from the storage and Compute network, because
the storage network can produce big load of network
traffic and it can slow down the management network.
As a result we removed the storage roles from the con-
troller nodes. Since we did not have big hard drives
in these nodes, we did not lose significant storage ca-
pacity. Though in the OpenStack documentation the
storage role is not recommended for the controllers,
in a small cloud (having 4-10 nodes) it can be reason-
able. Finally we arrived to the deployment shown in
Table 2.
4 PERFORMANCE ANALYSIS OF
OpenStack
After reviewing and considering benchmarking solu-
tions from the literature, we selected Rally (Open-
Stack, 2015f) as the main benchmarking solution for
the performance analysis of our private OpenStack
cloud. We defined several scenarios to analyze the
performance characteristics of our cloud. In some
cases we also used the Python API of OpenStack
(OpenStack, 2015d) to create specific test scenarios.
In the following subsections we introduce these sce-
narios, and present the result of our experiments.
4.1 Benchmarking Scenarios
OpenStack is a really big ecosystem of cooperative
CLOSER 2016 - 6th International Conference on Cloud Computing and Services Science
284
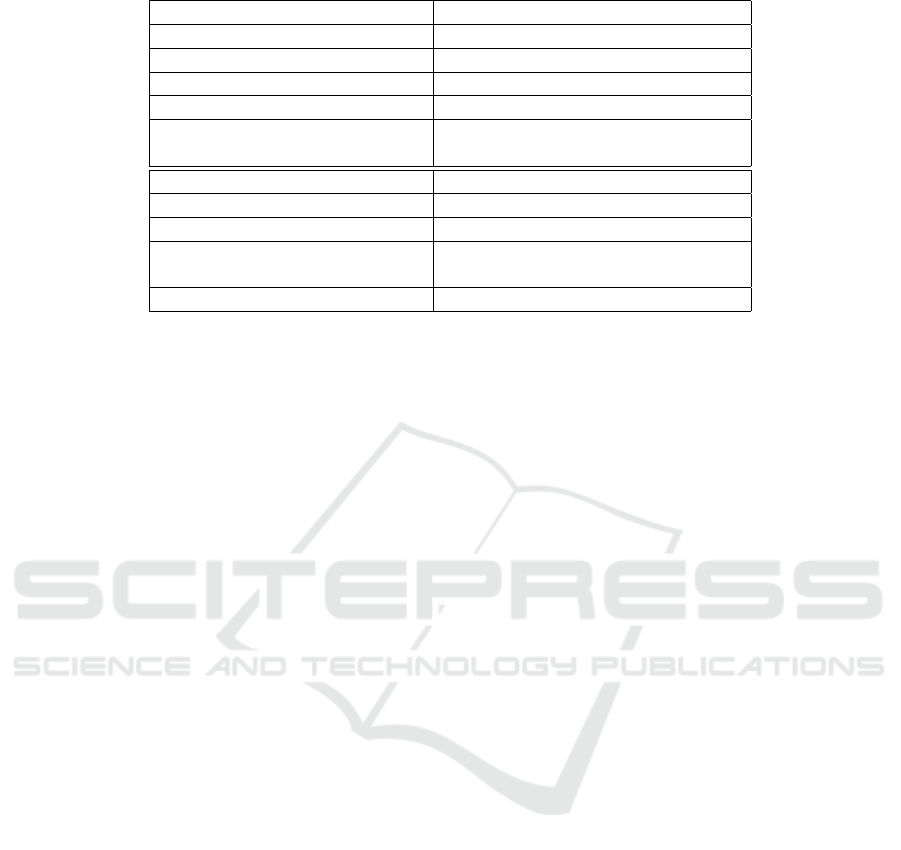
Table 2: Deployment parameters of our private OpenStack cloud.
Distribution Mirantis 5.0.1 (OpenStack Icehouse)
Extra components Ceilometer, High Availibilty (HA)
Operating System Ubuntu 12.04 LTS (Precise)
Hypervisor KVM
Storage backend Ceph
Network (Nova FlatDHCP) Network #1: Public, Storage, VM
Network #2: Admin, Management
Fuel Master node 1x Type 2
Controller nodes 2x Type 1
Controller, telemetry, MongoDB 1x Type 1
Compute, Storage - Ceph nodes 2x Type 1+ 8GB RAM
2x Type 1 + 700GB DISK
Storage Cinder 1x Type 2 + 500GB DISK
services, and when something fails, performs slowly
or does not scale, it is really hard to answer ques-
tions on what, why and where it has happened. Rally
(OpenStack, 2015f) can help to answer these ques-
tions, therefore it is used by developers to make sure
that a newly developed code works fine and helps to
improve OpenStack. Some typical use cases for Rally
can help to configure OpenStack for a specific hard-
ware, or they can show the OpenStack quality by time
with historical data of benchmarks. Rally consists of
4 main components: Server Providers to handle VMs,
Deploy Engines to deploy the OpenStack cloud, Ver-
ification to run tempest (or other tests), collect the re-
sults and present them in a human readable form, and
Benchmark engine to write parameterized benchmark
scenarios.
Our goal is to provide test cases that can mea-
sure the performance of a private cloud, could help
in finding bottlenecks and can be used to ensure that
our cloud will be working as expected in a close to
real life utilization. The VM lifecycle handling (start,
snapshot and stop), user handling, networks and mi-
gration will be in the focus of our benchmarking tests.
In the first round of experiments we will benchmark
specific parts of the cloud without stress testing other
parts, and later these tests will be repeated with ar-
tificially generated stress on the system. As a future
work, these test cases could be used to compare differ-
ent infrastructure configurations, for example to com-
pare the native OpenStack and Mirantis default set-
tings, or other custom configurations.
In all scenarios we will use three types of VM fla-
vors: (i) small (fS) - 1 VCPU; 1536 MB RAM, (ii)
medium (fM) - 2 VCPU; 3072 MB RAM and (iii)
big (fB) - 4 VCPU; 6144 MB RAM. The following
OS images will be used for the testing VMs: Ubuntu,
Xubuntu, CirrOS. Our basic test scenarios are the fol-
lowings:
1. VM start and stop: The most basic VM operations
are to start and stop a VM. In this scenario we
perform these operations, and measure the time
taken to start a VM and decommissioning it. The
VM will be booted from image and from volume
too.
2. VM start, create snapshot, stop: Creating a snap-
shot is an important feature of a cloud. Therefore
in this scenario we start a VM, save a snapshot
of the machine, then decommission it. The two
subscenarios are when the VM is booted from an
image and from a volume.
3. Create and delete image: The image creation and
deletion are usual operations. In this case we mea-
sure the time taken to create a new VM image, and
to delete an existing VM image file.
4. Create and attach volume: In this scenario we will
test the storage performance by creating a volume
and attaching it to a VM.
5. Create and delete networks: In this scenario we
examine the networking behavior of the cloud by
creating and removing networks.
6. Create and delete subnets: In this case we will
measure subnet creation and deletion by creating
a given number of subnets and then delete them.
7. Internal connection between VMs: In this sce-
nario we will measure the internal connection reli-
ability between VMs by transferring data between
them.
8. External connection: In this scenario we will mea-
sure the external connection reliability by down-
loading and uploading 1 GB data from and to a
remote location.
9. Migration: Migration is also an important feature
of a cloud, therefore we will test live migration
capabilities in this scenario.
Performance Analysis of an OpenStack Private Cloud
285
To fully test the cloud environment, we need to
examine the performance in scenarios with artificially
generated background load, where specific operations
could also affect the overall performance. Therefore
we will examine the following cases:
• Concurrency: User handling and parallel opera-
tions are important in a cloud, so we will execute
several scenarios concurrently.
• Stress: We will use dedicated stressing VMs (ex-
ecuting Phoronix benchmarks) to intensively use
the allocated resources of the cloud, and measure
how the VM behavior will change compared to
the original scenarios.
• Disk: We will also perform scenarios with vary-
ing disk sizes. The basic test case scenarios will
be executed in different circumstances, which are
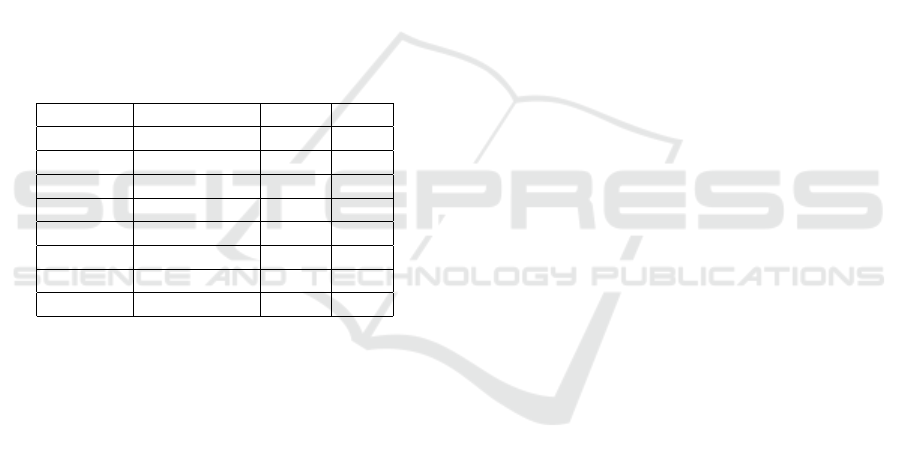
specified by the above three factors. As a result
we have 8 test categories, but not all of them will
be used for each scenario. Table 3 shows the de-
fined test case categories.
Table 3: Test case categories for cloud benchmarking.
Category Concurrency Stress Disk
1 NO NO NO
2 NO NO YES
3 YES NO NO
4 YES NO YES
5 NO YES NO
6 NO YES YES
7 YES YES NO
8 YES YES YES
Concerning the built-in Rally scenarios, we had to
create JSON parameter files that specify the details
of the actual test. Nevertheless for an actual scenario
we had different test cases, which had to be defined by
different JSON parameters. Therefore we developed a
Java application that is able to generate custom JSON
description files for the different cases. The Java ap-
plication has a Constants class, where the JSON pa-
rameters can be modified in one place, like the used
image for the VMs or the flavors. The BaseScenario
class represents a general scenario and defines some
general methods like using different flavors or setting
the concurrency of a test case. We created some other
classes, which are used for the JSON generation with
GSON (Google Java library to convert Java object to
JSONs). Every scenario has its own Java class, for
example the Scenario01 class, where we can define
additional capabilities that are extensions to the gen-
eral BaseScenario. To run test cases in an automated
way, we used a bash script.
Because of the intensive development progress in
the Rally development, we tried to use the latest ver-
sion, but we also wanted to have all the used versions,
in case an exact test recreation would be needed. That
is why we have multiple Rally folders with different
versions. The script iterates on all the folders in the
Scenarios folder and generates HTML reports.
Concerning Scenario 7 and 8, we planned to use
custom scripts inside Rally. We created these scripts,
but we experienced problems related to network ac-
cess during executing these cases. Rally generates
special user accounts for each case, and sometimes
in the custom scripts not all created entities can be
modified or accessed. To overcome these problems,
we used the OpenStack Python API to create custom
scripts for these scenarios and execute them without
using Rally.
4.2 Evaluation Results
In this subsection we present the results of our per-
formance analysis of our private OpenStack cloud
installed at the Software Engineering Department
(SED) of the University of Szeged, Hungary. Table
4 summarizes the measured values for all cases (in
seconds), while Figure 1 shows the charts generated
by Rally for a specific test cases of Scenario 2.
4.3 Discussions
In Scenario 1 more than 95% of the execution time
was spent on VM booting. The flavor of the VM
made minimal difference in time, but in the concur-
rent cases the measurements with big flavors resulted
in only 60% success ratio. Also in the concurrent
cases the measured booting time was in average twice
as much as in the non-current cases (4 VMs were
started in the concurrent tests at the same time).
Within this scenario we also investigated boot-
ing from volume instead of an image. We found
that the average booting time took 10% more in non-
concurrent cases, and more than 40% execution time
increase in concurrent cases, and we also experienced
higher deviations. The number of errors were also in-
creased, the usual error type was: Block Device Map-
ping is Invalid.
Concerning different flavors for Scenario 2 we ar-
rived to a similar conclusion, i.e. in the measured
times there was minimal difference, but the concur-
rent test cases with big flavors had only 30% success
rate. The image creation and VM booting had around
45% of the measured time each (as shown in Fig. 1).
The concurrent executions almost doubled the mea-
sured time of the scenarios. For the second round of
experiments using stressing VMs on the nodes, we
CLOSER 2016 - 6th International Conference on Cloud Computing and Services Science
286
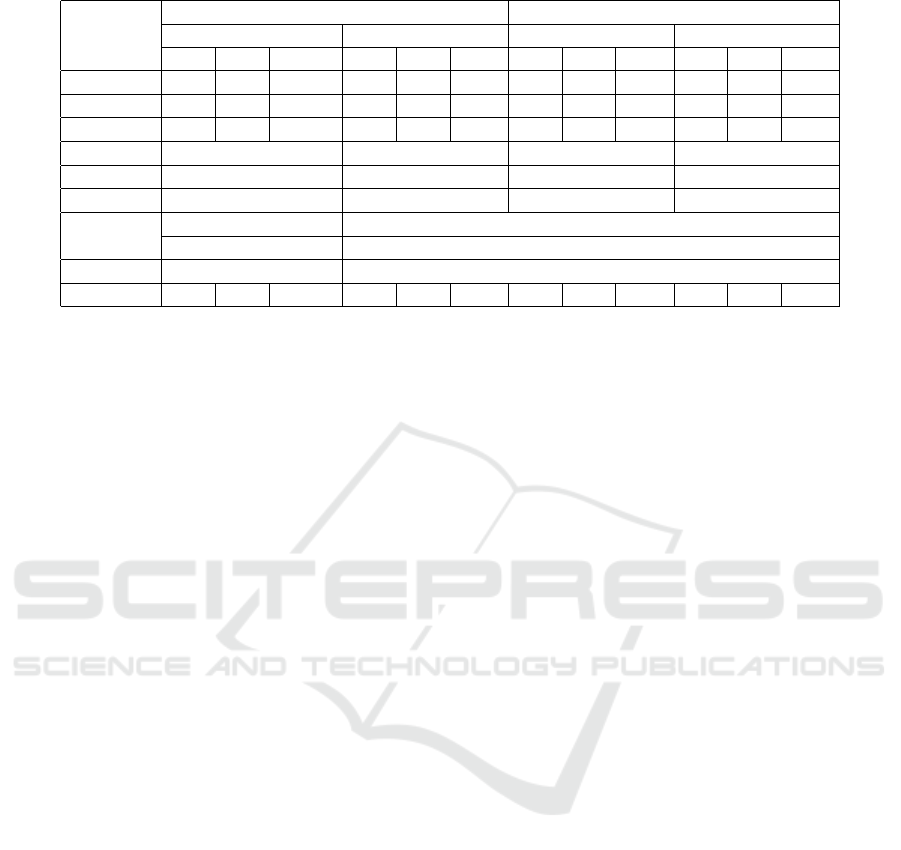
Table 4: Summary of the performance analysis results.
Scenario
No Stress Stress
No Concurrency Concurrency No Concurrency Concurrency
number fS fM fB fS fM fB fS fM fB fS fM fB
1/Image 87 86 92 180 163 158 119 105 126 307 164 191
1/Volume 101 101 109 290 208 301 120 118 126 278 233 307
2 183 189 185 316 329 288 208 202 210 397 421 373
3 8 11 7 12
5 0.304 0.549 0.287 0.426
6 0.598 0.858 0.624 0.923
7
Upload / Download N/A
32.079 / 246.398 N/A
8 61.703 N/A
9 90 96 97 165 181 N/A 110 109 N/A 203 214 N/A
experienced around 10% increase for non-concurrent
cases and 30% increase for the concurrent ones.
In Scenario 3 image creation took most of the
time, while deletion had 20% to 40% of the overall
measurement time. In the concurrent cases it took
around 1.5 times more to perform the same tasks. It
is interesting that for the concurrent scenarios image
deletion took longer than in the non-concurrent cases,
compared to the performance degradation of image
creation cases.
Concerning Scenario 4, all measurements have
failed (due to timeout operations). After investigat-
ing the problem, we found that it seems to be a bug
in Rally, since attaching volumes to VMs through
the web interface works well, and can be performed
within 1-2 seconds. Therefore we did not detail these
results in Table 4.
In Scenario 5, for the concurrent cases we experi-
enced around 10% increase in execution time for cre-
ating and deleting networks. The creation and dele-
tion ratio not changed in a significant way, the dele-
tion ratio raised from 30% to 35%.
In Scenario 6, we examined subnet management.
Both in the non-concurrent and concurrent cases we
experienced 40% failures due to tenant network un-
availability. The concurrent cases took a bit more than
twice as much time to perform.
Scenarios 7 and 8 have been implemented in cus-
toms scripts using the OpenStack Python API. The
results for data transfers show that uploading to an ex-
ternal server was 10 times faster in average (because
it was within the same building) than the downloading
from a server (located in Germany). Concerning the
internal connection between VMs within the cloud we
found that it was twice slower than the external up-
load to a remote server within the building. During
the data transfers we experienced a couple of errors
with the following types: 113 - ’No route to host’ and
111 - ’Connection refused’. These cases were rerun.
During the evaluation of Scenario 9 we had a hard-
ware failure in one of the computing nodes, which
resulted in high number of errors. Concerning the
successful cases, we experienced nearly 50% time in-
crease in concurrent cases to the non-concurrent ones.
5 CONCLUSION
Cloud computing offers on-demand access to com-
putational, infrastructure and data resources operated
from a remote source. This novel technology has
opened new ways of flexible resource provisions for
businesses to manage IT applications and data re-
sponding to new demands from customers. Neverthe-
less it is not an easy task to determine the performance
of the ported applications in advance.
In this paper we proposed a set of general cloud
test cases and evaluated a private OpenStack cloud
deployment with a performance evaluation environ-
ment based on Rally. These test cases were used for
investigating the internal behavior of OpenStack com-
ponents in terms of computing and networking capa-
bilities of its provisioned virtual machines.
The results of our investigation showed the per-
formance of general usage scenarios in a local cloud.
In general we can conclude that stressing a private
cloud with targeted workloads does introduce some
performance degradation, but the system returns to
normal operation after the stressing load. We also ex-
perienced failures in certain cases, which means that
fresh cloud deployments need to be fine-tuned for cer-
tain scenarios. We believe that we managed to give an
insight of cloud behavior with our test cases for busi-
nesses planning to move to the cloud. In our future
work will continue investigating OpenStack behavior
with additional test cases derived from real world ap-
plications.
Performance Analysis of an OpenStack Private Cloud
287
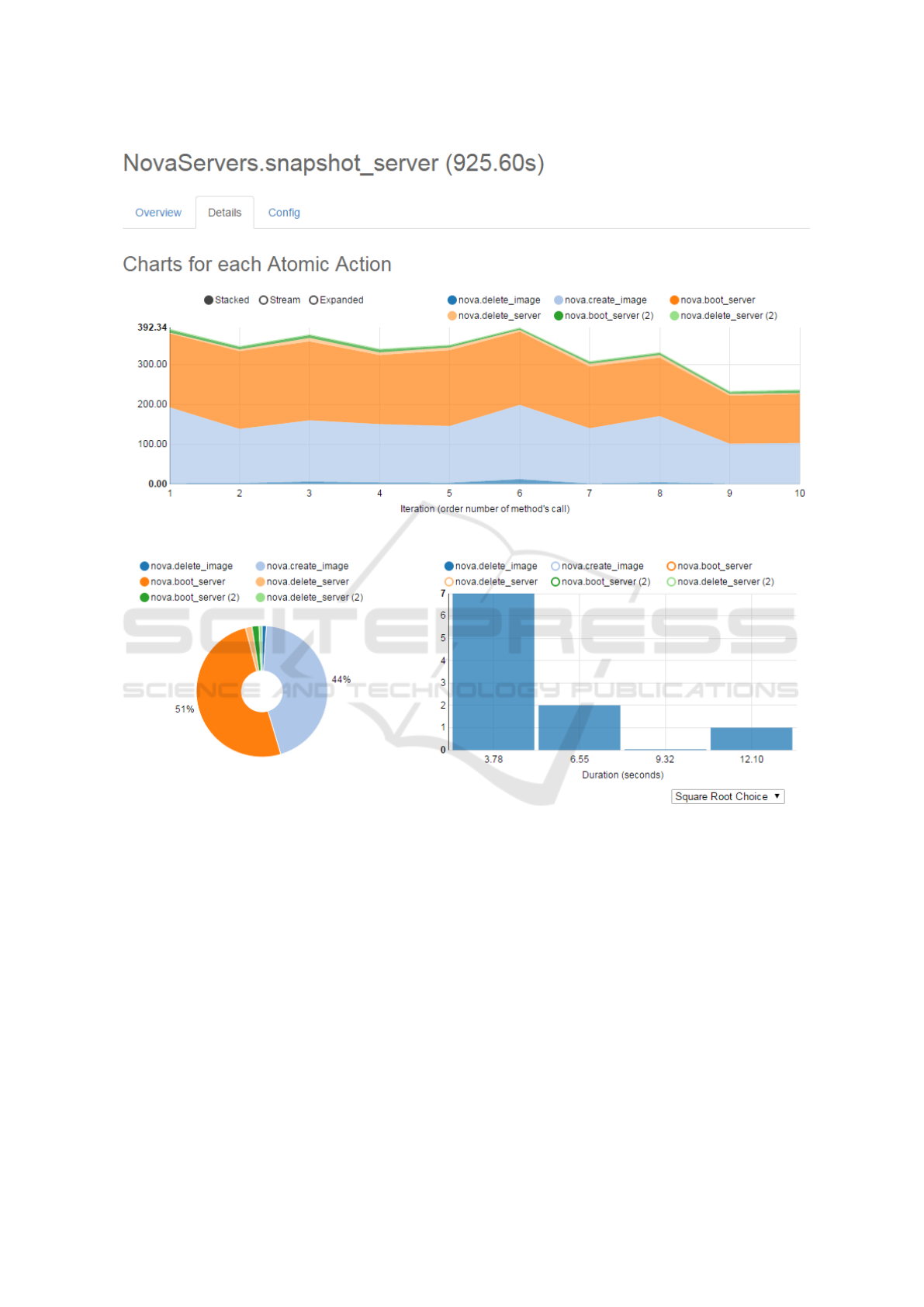
Figure 1: Detailed results and charts for the concurrent test case of Scenario 2 with medium VM flavor.
ACKNOWLEDGEMENTS
The research leading to these results has received
funding from Ericsson Hungary Ltd.
REFERENCES
Buyya, R., Yeo, C. S., Venugopal, S., Broberg, J., and
Brandic, I. (2009). Cloud computing and emerging
IT platforms: Vision, hype, and reality for delivering
computing as the 5th utility. Future Generation Comp.
Syst, 25(6):599–616.
Cloudharmony (2014). Cloudharmony website, http://
cloudharmony.com, dec. 2014.
Fatema, K., Emeakaroha, V. C., Healy, P. D., Morrison, J. P.,
and Lynn, T. (2014). A survey of cloud monitoring
tools: Taxonomy, capabilities and objectives. Journal
of Parallel and Distributed Computing, 74(10):2918 –
2933.
Ficco, M., Rak, M., Venticinque, S., Tasquier, L., and Aver-
sano, G. (2015). Cloud evaluation: Benchmarking
and monitoring. In Quantitative Assessments of Dis-
tributed Systems, pages 175–199. John Wiley & Sons,
Inc.
Ishanov, K. (2013). Openstack benchmarking on softlayer
with rally.
Leitner, P. and Cito, J. (2014). Patterns in the chaos - a study
CLOSER 2016 - 6th International Conference on Cloud Computing and Services Science
288

of performance variation and predictability in public
iaas clouds. CoRR, abs/1411.2429.
Mirantis (2014a). Calculation for openstack deployments,
http://docs.mirantis.com/openstack/fuel/fuel-5.0/pre-
install-guide.html#hardware-calculation, december
2014.
Mirantis (2014b). Hardware calculator for open-
stack deployments, https://www.mirantis.com/
openstack-services/bom-calculator/, december 2014.
Mirantis (2015a). Confirm hardware for openstack de-
ployments, http://docs.mirantis.com/openstack/fuel/
fuel-5.0/user-guide.html#confirm-hardware, decem-
ber 2015.
Mirantis (2015b). Mirantis software website, https://
software.mirantis.com/, december 2015.
Mirantis (2015c). Openstack deployment guide, http://
docs.mirantis.com/openstack/fuel/fuel-5.0/user-
guide.html#create-a-new-openstack-environment,
december 2015.
Mirantis (2015d). Planning guide for openstack de-
ployments, http://docs.mirantis.com/openstack/fuel/
fuel-5.0/pre-install-guide.html, december 2015.
OpenStack (2015a). Calculation for openstack de-
ployments, http://docs.openstack.org/developer/
ceilometer/, october 2015.
OpenStack (2015b). Openstack distributions, http://
www.openstack.org/marketplace/distros, december
2015.
OpenStack (2015c). Openstack project website, http://
www.openstack.org, december 2015.
OpenStack (2015d). Openstack python clients, https://wiki.
openstack.org/wiki/openstackclients, december 2015.
OpenStack (2015e). Openstack roadmap, http://
www.openstack.org/software/roadmap/, decem-
ber 2015.
OpenStack (2015f). Rally wiki page, https://wiki.
openstack.org/wiki/rally, october 2015.
Vaquero, L. M., Rodero-Merino, L., Caceres, J., and Lind-
ner, M. (2008). A break in the clouds: Towards a
cloud definition. SIGCOMM Comput. Commun. Rev.,
39(1):50–55.
Performance Analysis of an OpenStack Private Cloud
289
