
A Lightweight and High Performance Remote Procedure Call
Framework for Cross Platform Communication
Hakan Bagci and Ahmet Kara
Tubitak Bilgem Iltaren, Ankara, Turkey
Keywords:
Remote Procedure Call, High Performance Computing, Cross Platform Communication.
Abstract:
Remote procedure calls (RPC) are widely used for building distributed systems for about 40 years. There
are several RPC implementations addressing different purposes. Some RPC mechanisms are general purpose
systems and provide a number of calling patterns for functionality, hence they do not emphasize performance.
On the other hand, a small number of RPC mechanisms are implemented with performance as the main
concern. Such RPC implementations concentrate on reducing the size of the transferred RPC messages. In
this paper, we propose a novel lightweight and high performance RPC mechanism (HPRPC) that uses our
own high performance data serializer. We compare our RPC system’s performance with a well-known RPC
implementation, gRPC, that addresses both providing various calling patterns and reducing the size of the
RPC messages. The experiment results clearly indicate that HPRPC performs better than gRPC in terms
of communication overhead. Therefore, we propose our RPC mechanism as a suitable candidate for high
performance and real time systems.
1 INTRODUCTION
RPC enables users to make a call to a remote proce-
dure that resides in the address space of another pro-
cess (Corbin, 2012). This process could be running
on the same machine or another machine on the net-
work. RPC mechanisms are widely used in building
distributed systems because they reduce the complex-
ity of the system and the development cost (Kim et al.,
2007). The main goal of an RPC is to make remote
procedure calls transparent to users. In other words, it
allows users to make remote procedure calls just like
local procedure calls.
The idea of the RPC is first discussed in 1976
(Nelson, 1981). Nelson studied the design possibili-
ties for RPCs in his study. After Nelson, several RPC
implementations developed such as Courier RPC (Xe-
rox, 1981), Cedar RPC (Birrell and Nelson, 1984)
and SunRPC (Sun Microsystems, 1988; Srinivasan,
1995). SunRPC became very popular on Unix sys-
tems. Then it is ported for Solaris, Linux and Win-
dows. SunRPC is widely used in several applications,
such as file sharing and distributed systems (Ming
et al., 2011).
RPC mechanism is basically a client-server model
(Ming et al., 2011). Client initiates an RPC request
that contains the arguments of the remote procedure
through a proxy. The request is then transferred to
a known remote server. After the server receives the
request, it delegates the request to a related service
that contains the actual procedure. The service then
executes the procedure using received arguments and
produces a result. Server sends this result back to
client. This process is illustrated in Figure 1.
Client Server
Proxy
Local
Procedure
Service
Remote
Procedure
parameters
result
Figure 1: RPC Client Server Communication.
One of the major concerns in high performance
computing systems and real-time systems is to re-
duce the size of data transfer. Therefore, a system
that wants to make a remote procedure call needs a
lightweight RPC mechanism with minimal overhead.
Furthermore, most of the RPC mechanisms operate
through networks, hence it is important to reduce the
size of the RPC packets. There are several research
Bagci, H. and Kara, A.
A Lightweight and High Performance Remote Procedure Call Framework for Cross Platform Communication.
DOI: 10.5220/0005931201170124
In Proceedings of the 11th International Joint Conference on Software Technologies (ICSOFT 2016) - Volume 1: ICSOFT-EA, pages 117-124
ISBN: 978-989-758-194-6
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
117

work focused on reducing the overhead of RPC mech-
anisms (Bershad et al., 1990; Satyanarayanan et al.,
1991).
Other RPC mechanisms focus on providing dif-
ferent types of calling patterns such as asynchronous
and parallel remote procedure calls (Satyanarayanan
and Siegel, 1990; Ananda et al., 1991). However, in-
creasing the number of calling patterns brings extra
overhead to the system. The size of the RPC packets
increases as new high level features are added to the
RPC mechanism. This is because of the increasing
size of protocol control data.
gRPC is a language-neutral, platform neutral,
open source RPC mechanism initially developed at
Google (Google, 2015b). It employs protocol buffers
(Protobuf) (Google, 2015a), which is Google’s ma-
ture open source mechanism, for structured data seri-
alization. gRPC aims to minimize data transfer over-
head while providing several calling patterns. gRPC
is a general purpose RPC mechanism, thus has sev-
eral high level features, which bring extra overhead in
data transfer. For example, an identifier is transferred
to the server for each parameter. Therefore, it is not
suitable for systems that aims minimal data transfer
overhead.
In this paper, we introduce a lightweight and
high performance remote procedure call mechanism,
namely High Performance Remote Procedure Call
(HPRPC), that aims to minimize data transfer over-
head. We employ our own structured data serializa-
tion mechanism, named Kodosis. Kodosis is a code
generator that enables high performance data serial-
ization. The main contributions of our work are given
below:
• A novel lightweight and high performance RPC
mechanism is proposed.
• A code generator that enables high performance
data serialization is introduced.
• A comparison between the performances of our
RPC mechanism and gRPC is given which
demonstrates that our RPC mechanism performs
better than gRPC in terms of data transfer over-
head.
The rest of the paper is organized as follows: In the
next section, the research related to the RPC mech-
anisms is briefly explained. In Section 3, we pro-
vide the details of HPRPC. The experiment results are
given in Section 4. Finally, we conclude the paper
with some discussions.
2 RELATED WORK
RPC mechanisms are widely used for building dis-
tributed systems since mid 1970s. There are several
RPC implementations in the literature. In this section,
we briefly describe the RPC mechanisms that are re-
lated to our work.
XML-RPC (UserLand Software Inc., 2015) en-
ables remote procedure calls using HTTP as trans-
port protocol and XML as serialization technique for
exchanging and processing data (Jagannadham et al.,
2007). Since HTTP is available on every kind of pro-
gramming environment and operating system, with
a commonly used data exchange language as XML,
it is easy to adapt XML-RPC for any given plat-
form. XML-RPC is a good candidate for integra-
tion of multiple computing environments. However,
it is not good for sharing complex data structures
directly (Laurent et al., 2001), because HTTP and
XML bring extra communication overhead. In (All-
man, 2003), the authors show that the network per-
formance of XML-RPC is lower than java.net due to
the increased size of XML-RPC packets and encod-
ing/decoding XML overhead.
Simple Object Access Protocol (SOAP) (W3C,
2015) is a widely used protocol for message exchange
on the Web. Similar to XML-RPC, SOAP generally
employs HTTP as transport protocol and XML as data
exchange language. While XML-RPC is simpler and
easy to understand, SOAP is more structured and sta-
ble. SOAP has higher communication overhead than
XML-RPC because it adds additional information to
the messages that are to be transferred.
In (Kim et al., 2007), the authors present a flexible
user-level RPC system, named FlexRPC, for develop-
ing high performance cluster file systems. FlexRPC
system dynamically changes the number of worker
threads according to the request rate. It provides
client-side thread-safety and supports multithreaded
RPC server. Moreover, it supports various calling
patterns and two major transport protocols, TCP and
UDP. However, these extra capabilities of FlexRPC
could cause additional processing and communication
overhead.
In recent years, RPC mechanisms has started to
be used in context of high-performance computing
(HPC). Mercury (Soumagne et al., 2013) is an RPC
system specifically designed for HPC systems. It
provides an asynchronous RPC interface and allows
transferring large amounts of data. It does not imple-
ment higher-level features such as multithreaded exe-
cution, request aggregation and pipelining operations.
The network implementation of Mercury is abstracted
which allows easy porting to future systems as well as
ICSOFT-EA 2016 - 11th International Conference on Software Engineering and Applications
118
efficient use of existing transport mechanisms.
gRPC (Google, 2015b) is a recent and widely used
RPC mechanism that addresses both issues; provid-
ing various calling patterns and reducing the size of
the RPC messages. It uses Protobuf (Google, 2015a)
for data serialization. Protobuf aims to minimize the
amount of data to be transferred. Since gRPC is a
recent and well-known RPC framework and Protobuf
is a mature serialization mechanism, we compare our
HPRPC system’s performance with gRPC. The com-
parison results are presented in Section 4.
3 PROPOSED WORK
High Performance Remote Procedure Call (HPRPC)
Framework is designed with three main objectives:
• Lightweight & simple architecture
• High performance operation
• Cross-Platform support
3.1 Architecture
The design of HPRPC is inspired from (Google,
2015c), but it is implemented completely in our re-
search group with our objectives and experiences in
mind. It relies on three main components and one
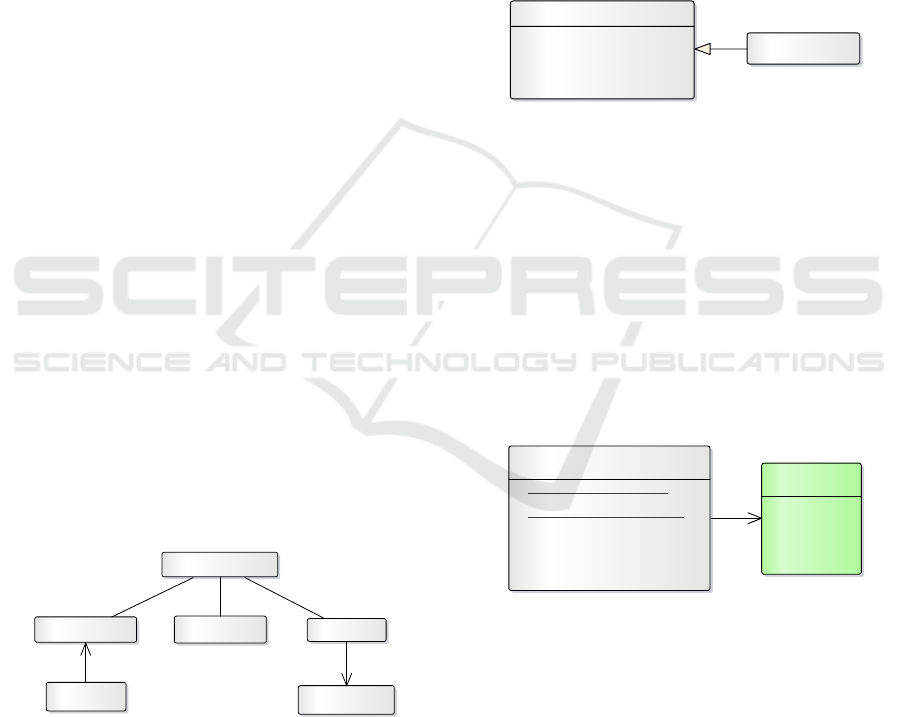
controller (Figure 2). RpcChannel is the communi-
cation layer that is responsible for transportation of
data. RpcClient is responsible for sending client re-
quests on the channel and RpcServer is responsible
for handling client requests incoming from the chan-
nel. RpcController, on the other hand, is the main
controller class that directs messages of client/server
to/from the channel. We will dig into the capabilities
of these classes in the following sections.
RpcController
RpcServer
RpcClient
RpcChannel
RpcService
RpcProxy
Figure 2: HPRPC Framework Overview.
3.1.1 Channel
RpcChannel implements duplex transportation
mechanism to send/receive messages (Figure 3).
Client/Server initiates a request by calling the Start-
Call method, which then requests an RpcHeader that
identifies the message and returns a BinaryWriter ob-
ject to transport the parameters. Caller serializes the
method parameters/return value to the BinaryWriter
object and calls the EndCall method to finish the
remote procedure call. On the other side the receiving
RpcChannel deserializes the RpcHeader structure
and sends it to the Controller with a BinaryReader
object in order to read the parameters/return value.
Controller invokes Client or Server message handling
methods according to this RpcHeader information.
Currently, RpcChannel is implemented only for
the Tcp/Ip communication layer. However, the archi-
tecture allows any other implementations that include
pipes or shared memory mechanisms.
RpcChannel
+ EndSend(): void
+ RpcChannel(RpcController)
+ StartSend(RpcHeader): BinaryWriter
«property»
+ Controller(): RpcController
TcpRpcChannel
Figure 3: RpcChannel Class.
RpcHeader is a simple struct that consists of 4
fields (Figure 4):
• A unique id that identifies the call
• Type of message that identifies the payload
• Type of service
• Type of called procedure
Header struct specifies its serialization/deserialization
methods that use a 4-byte preamble to protect mes-
sage consistency. If the previous message was not
consumed properly, preamble-check throws an excep-
tion to prevent unexpected failures.
«struct»
RpcHeader
+ Read(BinaryReader): RpcHeader
+ RpcHeader(int, MessageType, int, int)
+ Write(BinaryWriter, RpcHeader): void
«property»
+ Id(): int
+ MsgType(): MessageType
+ ProcType(): int
+ SrvType(): int
«enumeration»
MessageType
None = 0
Call = 1
Result = 2
VoidResult = 3
Error = 4
CloseChannel = 5
Figure 4: RpcHeader Struct.
3.1.2 Client
RpcClient is the class that is used by the proxies to
send method call requests and wait for their responses
(Figure 5). It contains different XXXCall methods to
initiate remote procedure calls and handle their re-
sponses. Call requests return a PendingCall object
that specifies a ticket for the return value. Caller waits
on the PendingCall object. When a response is re-
ceived from the server, it returns a value or throws
an exception depending on the remote procedure’s re-
sponse.
A Lightweight and High Performance Remote Procedure Call Framework for Cross Platform Communication
119
RpcClient
+ Call(int, int): PendingCallWithResult<T>
+ Call(int, int): PendingCall
+ EndCall(): PendingCallWithResult<T>
+ EndCall(): PendingCall
+ ReceiveResult(RpcHeader, BinaryReader): void
+ ReleasePendingCalls(string): void
+ StartCall(int, int): BinaryWriter
PendingCall
+ GetError(): string
+ GetId(): int
+ HasError(): bool
+ PendingCall(int)
+ Wait(): void
T
PendingCallWithResult
+ GetResult(): T
RpcProxy
+ RpcProxy(RpcClient, int)
«property»
# Client(): RpcClient
+ SrvType(): int
0..*1
Figure 5: RpcClient Class.
Proxies are custom generated classes that trans-
form user requests to the RpcClient calls. For each
method call, the proxy class calls the XXXCall method
of the RpcClient and waits for the PendingCall ob-
ject. This mechanism introduces transparency for the
user on the HPRPC framework. In Figure 6, it is
shown that the IConnectionTester interface is imple-
mented on the ConnectionTesterProxy. User calls the
KeepAlive method of this interface and does not deal
with the HPRPC framework details.
RpcProxy
+ RpcProxy(RpcClient, int)
«property»
# Client(): RpcClient
+ SrvType(): int
«interface»
IConnectionTester
+ KeepAlive(): void
ConnectionTesterProxy
+ ConnectionTesterProxy(RpcClient)
+ KeepAlive(): void
Figure 6: RpcProxy Class.
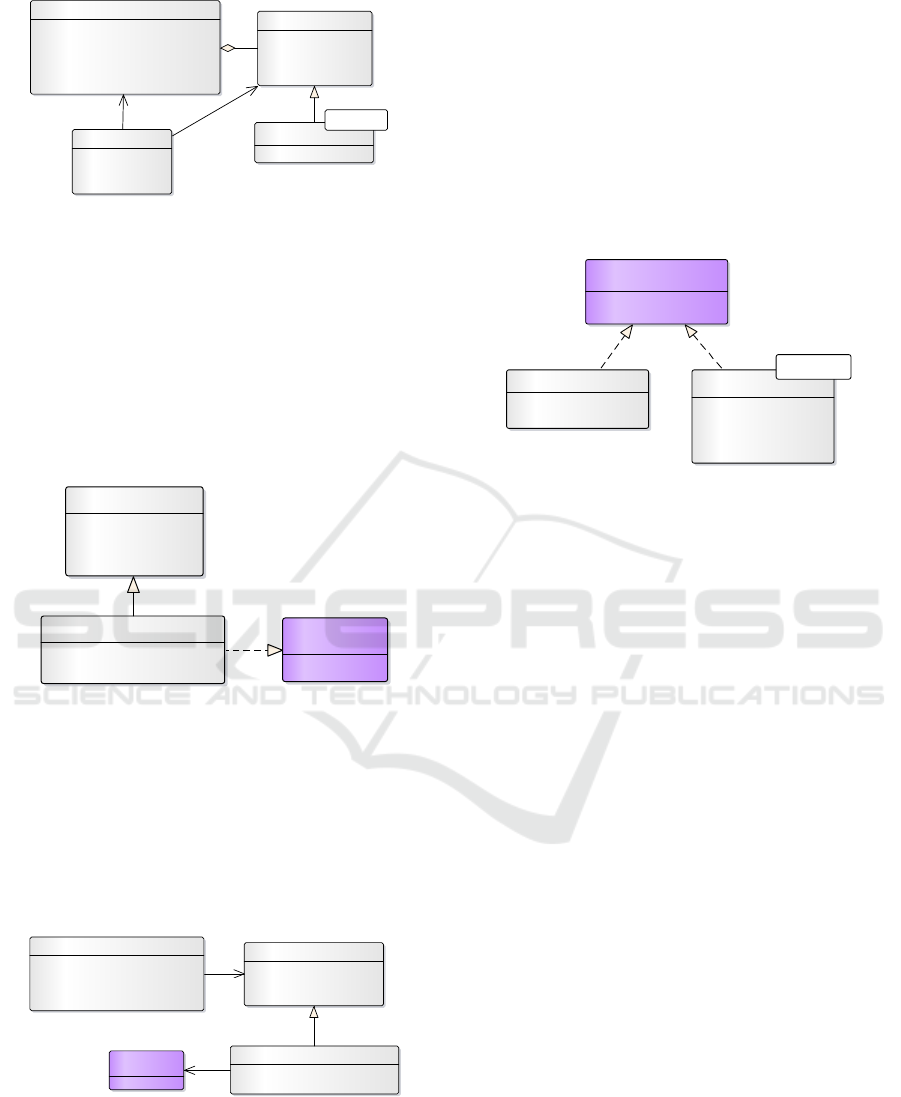
3.1.3 Server
RpcServer is responsible for handling client requests
(Figure 7). According to the ServiceType attribute it
calls the related RpcService’s Call method. Then se-
rializes its ReturnValue or in case of an error the ex-
ception information for the client.
«i nterface»
IConnectionTester
+ KeepAlive(): void
RpcServer
+ FindService(int): RpcService
+ ReceiveCall(RpcHeader, BinaryReader): void
+ RegisterService(RpcService): void
+ RpcServer(RpcController)
+ UnRegisterService(int): void
RpcService
^ Call(int, BinaryReader): IReturnValue
+ RpcService(int)
«property»
+ SrvType(): int
ConnectionTesterServ ice
^ Call(int, BinaryReader): IReturnValue
+ ConnnectionTesterService(IConnectionTester)
0..11
0..*0..1
Figure 7: RpcServer Class.
Services are custom generated classes that over-
ride the Call method of RpcService class. They invoke
the relevant method of their inner service instance
with the appropriate parameters. Instead of imple-
menting service methods like proxies, service classes
invoke service calls on an object that they own. As in
Figure 7, when the client calls the KeepAlive method,
RpcServer directs this call to ConnectionTesterSer-
vice which subsequently calls the KeepAlive method
of its own object.
The Call method of an RpcService class returns an
IReturnValue object that holds the return value of the
procedure call. As in Figure 8, return values can be
void or a typed instance of ReturnValue class. They
are handled on the RpcServer to transfer the method
results.
«interface»
IReturnValue
+ HasValue(): bool
+ WriteValue(BinaryWriter): void
ReturnValueVoid
+ HasValue(): bool
+ WriteValue(BinaryWriter): void
T
ReturnValue
+ HasValue(): bool
+ ReturnValue(T)
+ WriteValue(BinaryWriter): void
«property»
+ Value(): T
Figure 8: RpcReturnValue Class.
3.2 High Performance
One of the main objectives of HPRPC is having High
Performance operations. To achive this objective we
focused on two major areas:
• Having lightweight design
• Optimization of data serialization
3.2.1 Lightweight Design
The main objective of RPC is to establish a con-
nection between two endpoints easily with a proce-
dure call. Any other capabilities like asynchronous
call, multi-client/multi-server, heterogeneous plat-
forms etc. are additional features to facilitate spe-
cial user needs, but may reduce performance because
of their extra control mechanisms and data exchange
costs. For the High Performance objective in HPRPC,
we skipped these features to increase overall perfor-
mance. Basic features of our Lightweight Design can
be outlined as follows:
• Synchronous Call: Our clients can call one proce-
dure at a time.
• Single Client/Single Server: Our client and server
classes allow single endpoints.
• Homogenous Platforms: Although we support
cross-platform communications, the endpoints
must be homogenous. Therefore, their byte order
(Little/Big Endian), string encoding etc. should
be identical.
ICSOFT-EA 2016 - 11th International Conference on Software Engineering and Applications
120

We implemented our architecture ready for an
asynchronous call with the PendingCall class usage.
In the future, we are planning to add asynchronous
calls optionally with a limited performance loss.
3.2.2 Data Serialization
A procedure call generally includes some additional
data to transfer like method parameters and return
value. Hence, performance of an RPC mechanism is
highly correlated with the performance of its data se-
rialization/deserialization mechanism. In HPRPC, we
implemented data serialization with the help of a code
generator named KodoSis, which is developed in our
research group. It has the following capabilities:
• Consistency: Our data structures are defined in a
single configuration file and generated for all end-
points and platforms by KodoSis, which allows us
to use consistent data structures.
• Integrity: KodoSis generates the serializa-
tion/deserialization routines for all data structures
without any custom code.
• Minimal Overhead: No informative tags are re-
quired in data serialization, because both ends are
aware of the complete structure of the data.
• Performance: KodoSis serialization routines use
special mechanisms, specifically for lists of blit-
table types to increase performance.
3.3 Cross-platform Support
Our architecture has been implemented on several
languages and platforms. The same architecture, with
identical class and method names, is implemented
and tested for multiple languages and compilers. All
implementations can communicate with each other,
without the knowledge of the other platform.
In Windows operating system, we support C# lan-
guage with .NET Framework and C++ language with
Microsoft Visual C++ Compiler. In Linux like op-
erating systems we support C++ language with gcc
compiler.
In C++, we employed C++ v11 constructs like
shared ptr, thread, mutex etc. to increase robust-
ness and have simple code. In some legacy systems
(gcc v4.3) that does not support C++ v11, equivalent
classes of The Boost Framework (Boost, 2015) are
employed.
4 EVALUATION
As explained previously, HPRPC aims to minimize
communication overhead between the RPC client and
the RPC server. In order to achieve this goal, it em-
ploys Kodosis to minimize the amount of data to be
transferred through the RPC channel. We conduct
several experiments to evaluate our proposed work.
In these experiments, we compare the performance
of HPRPC with gRPC. gRPC is a well-known open
source RPC mechanism that is initially developed by
Google. It employs Protobuf for data serialization.
Similar to Kodosis, Protobuf also aims to minimize
the amount of data transferred.
4.1 Evaluation Methodology
Four different operations are chosen to be used in
experiments. Each operation uses different kinds of
requests and responses. Average and GetRandNums
operations are also used in evaluation of XML-RPC
(Allman, 2003). The details of these operations are
given below:
• HelloReply SayHello (HelloRequest Request)
This operation sends a HelloRequest message that
contains a parameter with type string and re-
turns a HelloReply message that contains ”Hello”
concatenated version of the request parameter.
This operation represents a small request/small re-
sponse transaction.
• DoubleType Average (Numbers Numbers)
This operation returns the average of Numbers list
that contains 32-bit integers. The size of the Num-
bers list is not fixed. We test the performance
of RPC mechanisms under varying numbers of
Numbers list. This operation represents a big re-
quest/small response transaction.
• Numbers GetRandNums (Int32Type Count)
This operation returns a list of random 32-bit in-
tegers given the desired number of random num-
bers. We test the performance of RPC mecha-
nisms under the varying numbers of count param-
eter. This operation represents a small request/big
response transaction.
• LargeData SendRcvLargeData (LargeData
Data)
This operation receives a large amount of data
and returns the same data. There are different
versions of LargeData that contain different
number of parameters. This operation represents
a big request/big response transaction.
In experiments, we measure the transaction times of
each operation for gRPC and HPRPC. All the experi-
ments are repeated for 1000 times and the total trans-
action times are recorded. In large data experiments,
we also measure the RPC packet sizes to compare the
A Lightweight and High Performance Remote Procedure Call Framework for Cross Platform Communication
121

amount of data that is to be transferred through RPC
channels.
4.2 Experiment Results
For the first experiment, we measure the transac-
tion time of SayHello function which is a small re-
quest/small response operation. The total transaction
times of 1000 operations for gRPC and HPRPC are
305 ms and 279 ms, respectively. HPRPC performs
9.3% better than gRPC. This is due to the fact that
Protobuf tags the string parameter in HelloRequest
message while Kodosis does not use tags in serial-
ization. Therefore, total amount of data that is to
be transferred is increased in gRPC as opposed to
HPRPC. In this experiment, we only have a single pa-
rameter in the request and the response messages. We
also examine the performance of the two RPC mech-
anisms when we increase the number of parameters
in a single message. The results of this experiment is
presented in large data tests.
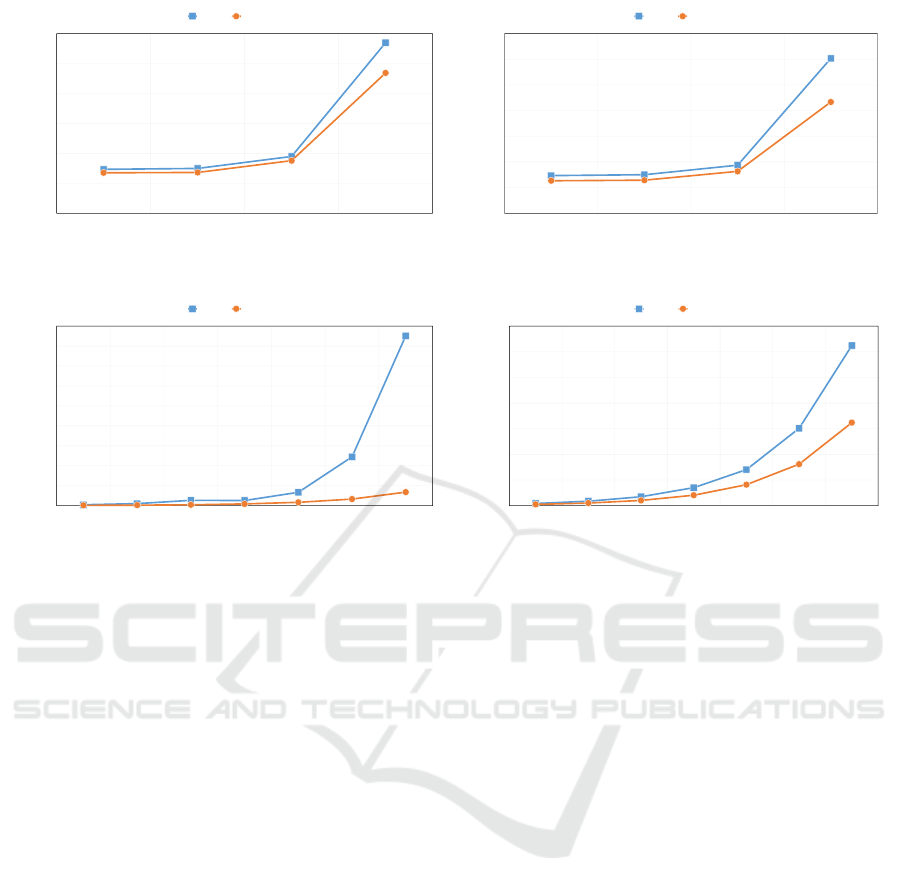
The second experiment measures the performance
of the two RPC mechanisms using Average function
which represents a big request/small response trans-
action. The results of Average operation tests are de-
picted in Figure 9a. In this experiment, clients call the
respective Average functions from RPC servers for
different number of 32-bit integers. When the number
of inputs is 10, HPRPC has 8.5% better performance
than gRPC. The difference between performances in-
crease and gets the highest value, when the input size
increased to 10000. At that point, gRPC’s total trans-
action time is 21.6% higher than HPRPC. The perfor-
mance difference gets even higher when the input size
is beyond 10000. This result gives us a hint about the
improvement of HPRPC when the amount of data is
increased.
In Average function experiments, we only increase
the size of the request message. For completeness,
we also measure performance for increased response
message size. The results of GetRandNums function
experiments are shown in Figure 9b. As expected,
the results of this experiment are similar to the pre-
vious experiment’ results. In this case, the perfor-
mance difference increases even more. When 10 ran-
dom numbers are requested from RPC server, HPRPC
performs 12.9% better than gRPC. The difference in-
creases up to 39.2% when requested random number
count is 10000.
In Average and GetRandNums experiments, Num-
bers message type is employed as request and re-
sponse type, respectively. Numbers data structure
models multiple numbers as a repeated member of
the same type. gRPC and HPRPC both have opti-
mizations on repeated members. In the next experi-
ment, we evaluate the performances of RPC mecha-
nisms when a message type consists of non-repeating
members. In this experiment, we employ different
versions of LargeData message type such as Large-
Data128, LargeData256, etc. The number concate-
nated to LargeData indicates the number of members
in message type. For example, LargeData128 mes-
sage type contains 128 different members of type in-
teger.
SendRcvLargeData experiments employ 7 differ-
ent versions of LargeData message types to evaluate
the performance of RPC mechanisms under the vary-
ing numbers of members in the message. In these
tests, clients call the respective SendRcvLargeData
function from RPC servers, and servers send the same
data back to the clients. The results of this exper-
iment are illustrated in Figure 9c. HPRPC perfor-
mance is nearly 2.7 times better than gRPC when
member count is 128. As the number of members
in message types is increased, the transaction times of
gRPC increase substantially as opposed to HPRPC. In
the extreme case of 8192 number of members, gRPC
consumes approximately 12.5 times more transcation
time than HPRPC. This result clearly indicates that
HPRPC outperforms gRPC with increasing number
of members in RPC messages.
In order to find out why gRPC needs so much
transaction time when the number of members are in-
creased in messages, we further analyze the results
of the SendRcvLargeData experiments. In this anal-
ysis, we compare the transferred data packet sizes of
gRPC and HPRPC. The results of this analysis are de-
picted in Figure 9d. This analysis reveals the fact that
gRPC tends to use more bytes than HPRPC when the
number of members is increased in messages. This is
because of that gRPC employs a unique tag for each
member in messages. The messages are serialized
with these tags, hence the RPC packet sizes are in-
creased. Moreover, as the number of members are
increased, the number of bytes that are used to repre-
sent tag values also increase. Tags are useful in some
cases such as enabling optional parameters, however
tagging each parameter brings extra communication
and processing overhead. Therefore, we conclude that
tagging parameters is not useful for high performance
systems.
HPRPC assumes all parameters in a message as
required, and the order of parameters do not change.
Therefore, RPC messages are serialized and deseri-
alized in the same order, which eliminates the need
for tagging parameters in HPRPC. This assumption
gives HPRPC advantage over other RPC implemen-
tations in high performance systems. This is due to
ICSOFT-EA 2016 - 11th International Conference on Software Engineering and Applications
122
0
200
400
600
800
1000
1200
10 100 1000 10000
gRPC HPRPC
Elapsed
Time (
ms
)
Number of 32-bit Integers
(a) Average
0
200
400
600
800
1000
1200
1400
10 100 1000 10000
gRPC HPRPC
Elapsed
Time (
ms
)
Number of 32-bit Integers
(b) GetRandNums
0
500
1000
1500
2000
2500
3000
3500
4000
4500
128 256 512 1024 2048 4096 8192
gRPC HPRPC
Elapsed
Time (
ms
)
Number of 32-bit Integers
(c) SendRcvLargeData
0
10000
20000
30000
40000
50000
60000
70000
128 256 512 1024 2048 4096 8192
gRPC HPRPC
Total Size of RPC
Packets
(bytes
)
Number of 32-bit Integers
(d) Large Data Packet Size
Figure 9: Experiment Results.
the reduced RPC packet size and eliminated extra pro-
cessing cost of tagging. The results of SayHello and
GetRandNums experiments also verifies with this ar-
gument.
Protobuf additionally, enables several features for
definition of message types such as optional parame-
ters which brings extra overhead in size of RPC pack-
ets. On the other hand, our Kodosis implementation
provides a simple message definition language that
only enables basic required features. These features
of Kodosis help reduce RPC packet sizes, hence the
communication overhead.
5 CONCLUSION
HPRPC is an RPC mechanism that focuses on three
main objectives: Lightweight & simple architecture,
high performance and cross-platform support. In this
paper, we give details of our architecture with relevant
class diagrams and present some performance evalu-
ations that indicate our advantages over gRPC.
In order to evaluate the performance of our RPC
mechanism, we compare HPRPC with gRPC which
is a recent and well-known RPC mechanism that ad-
dresses both providing various calling patterns and re-
ducing the size of the RPC messages. The results of
the experiments clearly indicate that HPRPC outper-
forms gRPC in terms of communication overhead in
all of test cases. This is due to the high level features
of gRPC that bring extra overhead in data transfer.
In addition, the underlying serialization mechanism
of gRPC, Protobuf, tags all parameters in a message.
Therefore, gRPC messages tend to occupy more bytes
in data transfer. The size of the messages get even
higher as the number of parameters in a message are
increased. On the other hand, HPRPC provides not
only all the required basic features but also ensures
reduced RPC message size and minimal processing
overhead. This advantage allows HPRPC to perform
better in high performance scenarios. We conclude
that HPRPC is an appropriate RPC mechanism to be
used in high performance systems.
Currently, we implemented HPRPC with C# and
C++ languages on Windows and Linux operating sys-
tems. In the future we are planning to implement
our architecture with Java and increase our cross-
platform support. Moreover, we plan to implement
asynchronous calling patterns and concurrent execu-
tion of requests on server side.
REFERENCES
Allman, M. (2003). An evaluation of xml-rpc. ACM sig-
metrics performance evaluation review, 30(4):2–11.
A Lightweight and High Performance Remote Procedure Call Framework for Cross Platform Communication
123

Ananda, A. L., Tay, B., and Koh, E. (1991). Astra-an asyn-
chronous remote procedure call facility. In Distributed
Computing Systems, 1991., 11th International Confer-
ence on, pages 172–179. IEEE.
Bershad, B. N., Anderson, T. E., Lazowska, E. D., and
Levy, H. M. (1990). Lightweight remote proce-
dure call. ACM Transactions on Computer Systems
(TOCS), 8(1):37–55.
Birrell, A. D. and Nelson, B. J. (1984). Implementing Re-
mote Procedure Calls. ACM Transactions on Com-
puter Systems (TOCS), 2(1):39–59.
Boost (2015). Boost Framework. http://www.boost.org. Ac-
cessed: 2015-12-08.
Corbin, J. R. (2012). The art of distributed applications:
programming techniques for remote procedure calls.
Springer Science & Business Media.
Google (2015a). Google Protocol Buffers (Pro-
tobuf): Google’s Data Interchange Format.
Documentation and open source release.
https://developers.google.com/protocol-buffers.
Accessed: 2015-12-08.
Google (2015b). gRPC. http://www.grpc.io. Accessed:
2015-12-08.
Google (2015c). Protobuf-Remote: RPC Implemen-
tation for C++ and C# using Protocol Buffers.
https://code.google.com/p/protobuf-remote. Ac-
cessed: 2015-12-28.
Jagannadham, D., Ramachandran, V., and Kumar, H. H.
(2007). Java2 distributed application development
(socket, rmi, servlet, corba) approaches, xml-rpc and
web services functional analysis and performance
comparison. In Communications and Information
Technologies, 2007. ISCIT’07. International Sympo-
sium on, pages 1337–1342. IEEE.
Kim, S.-H., Lee, Y., and Kim, J.-S. (2007). Flexrpc: a flex-
ible remote procedure call facility for modern cluster
file systems. In Cluster Computing, 2007 IEEE Inter-
national Conference on, pages 275–284. IEEE.
Laurent, S. S., Johnston, J., Dumbill, E., and Winer, D.
(2001). Programming web services with XML-RPC.
O’Reilly Media, Inc.
Ming, L., Feng, D., Wang, F., Chen, Q., Li, Y., Wan, Y., and
Zhou, J. (2011). A performance enhanced user-space
remote procedure call on infiniband. In Photonics
and Optoelectronics Meetings 2011, pages 83310K–
83310K. International Society for Optics and Photon-
ics.
Nelson, B. J. (1981). ”Remote Procedure Call” CSL-81-9.
Technical report, Xerox Palo Alto Research Center.
Satyanarayanan, M., Draves, R., Kistler, J., Klemets, A.,
Lu, Q., Mummert, L., Nichols, D., Raper, L., Rajen-
dran, G., Rosenberg, J., et al. (1991). Rpc2 user guide
and reference manual.
Satyanarayanan, M. and Siegel, E. H. (1990). Parallel com-
munication in a large distributed environment. Com-
puters, IEEE Transactions on, 39(3):328–348.
Soumagne, J., Kimpe, D., Zounmevo, J., Chaarawi, M.,
Koziol, Q., Afsahi, A., and Ross, R. (2013). Mercury:
Enabling remote procedure call for high-performance
computing. In Cluster Computing (CLUSTER), 2013
IEEE International Conference on, pages 1–8. IEEE.
Srinivasan, R. (1995). RPC: Remote Procedure Call Proto-
col Specification Version 2 (RFC1831). The Internet
Engineering Task Force.
Sun Microsystems, I. (1988). RPC: Remote Procedure Call
Protocol Specification Version (RFC1057). The Inter-
net Engineering Task Force.
UserLand Software Inc. (2015). XML-RPC Specifica-
tion. http://xmlrpc.scripting.com/spec.html. Ac-
cessed: 2015-12-15.
W3C (2015). SOAP Version 1.2 Part 1:
Messaging Framework (Second Edition).
http://www.w3.org/TR/soap12/. Accessed: 2015-12-
15.
Xerox, C. (1981). Courier: The Remote Procedure Call
Protocol. Xerox System Integration Standard 038112.
ICSOFT-EA 2016 - 11th International Conference on Software Engineering and Applications
124
