
Combining Harvesting Operation Optimisations using Strategy-based
Simulation
Luis Diogo Couto
1
, Peter W. V. Tran-Jørgensen
1
and Gareth T. C. Edwards
2
1
Department of Engineering, Aarhus University, Aarhus, Denmark
2
Agro Inteligence ApS, Aarhus, Denmark
Keywords:
Harvesting Operations, Optimisation, Strategy Pattern, Design Patterns, VDM, Formal Methods, Model
Architecture.
Abstract:
Modelling and simulation assist in decision support or planning activities by allowing efficient exploration
of multiple scenarios in a situation where testing in a real setting is impractical. This exploration is often
done by varying numerical parameters in the model such as physical dimensions or speed in order to find
the optimal configuration. However, for certain problems, in order to find optimal solutions it is beneficial to
vary the algorithms that are used to implement the behaviour of the model. For example, when calculating
optimised routes for harvesters and other vehicles in a harvest operation, the choice of optimisation algorithms
is an important part of the problem. Traditional modelling and simulation techniques do not allow us to
vary algorithms across simulations effectively. In this paper, we address this issue by applying the strategy
pattern from software engineering to the construction of a formal model that enables different combinations of
harvest optimisation algorithms to be analysed effectively. This approach can be generalised to other planning
activities where multiple algorithms need to be considered.
1 INTRODUCTION
There are various steps to calculating optimised solu-
tions for harvest operations. These steps include par-
titioning of the field and calculating optimised cov-
erage plans for harvesters and route plans for other
vehicles. One approach to the problem often involves
the use of various optimisation algorithms that pro-
duce coverage plans for the harvesters (Spekken and
de Bruin, 2013; Edwards et al., 2013). However, plan-
ning of harvester routes is just one part of the har-
vest operation planning. Path planning for wagons (or
similar) that service the harvesters must often also be
developed. Algorithms exist for optimising service
plans (Jensen et al., 2012) but they are independent
from those of harvesters. This independence makes
it difficult to explore in detail how the various types
of algorithms interact and combine to produce a com-
plete solution for the harvest operation.
As an example, little research has previously been
conducted into how harvesting and loading algo-
rithms can affect operational execution times of har-
vesting operations. Examples of planning tools for
operations often employ a single algorithm; such as
in-field unloading (Oksanen and Visala, 2009) or sin-
gle point unloading (Edwards et al., 2015). Farmers
will generally choose a plan with which they are fa-
miliar without considering alternatives.
In this paper, we seek to explore how different op-
timization algorithms can be combined. We will ex-
plore this using a formal model in combination with
the strategy pattern from software engineering. The
strategy pattern is used in the model to encode differ-
ent optimization algorithms. A novel aspect here is
that the strategies representing the different kinds of
algorithms (harvest routing and wagon path planning)
co-exist and collaborate to produce the final solution.
From an operational research perspective, the
harvest operation is an example of an output ma-
terial flow (OMF) operation where material is re-
moved from the field and transported to another lo-
cation (Bochtis and Sørensen, 2009). The machinery
utilised within the OMF operation can be divided into
two groups; Primary Units (PUs) which perform the
main task i.e. harvesting the crop, and Service Units
(SUs) which service the PUs by receiving harvested
material and transporting it away. The capacity of the
PU is many times smaller than the expected yield of
the field, and therefore a PU unloads either to a nearby
SU or directly to an out of field storage point.
Couto, L., Tran-Jørgensen, P. and Edwards, G.
Combining Harvesting Operation Optimisations using Strategy-based Simulation.
DOI: 10.5220/0005932900250032
In Proceedings of the 6th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2016), pages 25-32
ISBN: 978-989-758-199-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
25

The planning of the tasks of the PUs and SUs are
often considered separately (Jensen, 2014), with cov-
erage plans being developed for PUs (Spekken and
de Bruin, 2013; Edwards et al., 2013) and path plans
being developed for SUs (Jensen et al., 2012). How-
ever, the tasks are spatially and temporally depen-
dant on one another, so in order for efficient plans
to be produced the plans must be developed concur-
rently (Scheuren et al., 2013).
To assist with the planning of in-field operations,
fields can be decomposed into a number of tracks or
rows. Many methods have been proposed for the de-
composition of fields (Oksanen and Visala, 2009; Jin
and Tang, 2010; Zandonadi, 2012; Hameed et al.,
2013). Fields are typically divided into headlands
which encircle the field and can be used for turning
and working rows which transect the main area of the
field. By confining all field traffic to drive along these
predefined rows, the trafficked area of the field can
be limited which has been shown to produce benefits
on increased yield and better soil structure (Tullberg,
2010).
In the above mentioned approaches, the planning
for the various kinds of vehicles is performed inde-
pendently, as is the decomposition of the field. In our
work, we consider all vehicles simultaneously when
planning, although field decomposition is still done
separately.
A different approach to optimisation was car-
ried out in a EU project called DESTECS. In this
project design space exploration is performed by
sweeping parameters of models of cyber-physical
systems (Fitzgerald et al., 2014). Among other
things, the DESTECS project proposes methodolog-
ical guidelines for modelling fault-tolerant cyber-
physical systems, which also involve the use of the
strategy pattern to model faulty behaviour as well
guarding against it (Broenink et al., 2012). This is
similar to the presented approach, in that the strategy
pattern is used in the DESTECS project to explore
different behaviours of a system. However, while the
DESTECS project used the strategy pattern to make
a system more fault-tolerant, in this work the strategy
pattern is used to help find optimised solutions to use
in a harvest operation.
The strategy pattern is a design pattern (Gamma
et al., 1995) with two key features. First, the strat-
egy pattern allows selection of different algorithms to
be done at execution time and; secondly, it defines
a family of interchangeable algorithms. Essentially
this allows one to execute the same functionality in
different ways. Broadly speaking, the strategy pat-
tern consists of a contract that defines the functions
of a strategy in terms of their inputs and outputs in-
cluding the properties that these functions may have.
Given this contract, a specific strategy must provide
an implementation of the functions that obeys the in-
put and output properties of the contract, but which is
free to use whatever algorithms are desired.
The remainder of this paper is structured as fol-
lows: in section 2 we present the architecture of the
formal model of the harvest operation based on the
strategy pattern. The technologies that have been used
to implement the model are described in section 3.
Next, the execution of the model is demonstrated in
section 4. Following that, in section 5, we report the
results of applying the model to a case study of a real
field. The results are then discussed in section 6. We
conclude the paper in section 7.
2 MODEL ARCHITECTURE
2.1 Model Overview
The model was developed according to the structure
shown in Figure 1. The Execution Engine is respon-
sible for coordinating the simulation and is connected
to both the State and the three Strategy classes. The
State contains the physical entities involved in the har-
vest operation. The harvesters are the PUs of the
operation. Coverage plans and coordinated service
points are developed for the harvesters by the em-
ployed strategies. The SUs are tractors with grain
wagons whose main objective within the harvest op-
eration is to convey material from the harvesters to
the out-of-field storage. The service points coordinate
when and where the SUs must meet the PUs in order
for material to be passed between the two.
Both the harvesters and the grain wagons are
modelled by their physical parameters such as their
working/non-working speed, storage capacity and
material offload rate. These parameters are specified
in the initialisation of the model. The storage point
is the out-of-field storage where all material from the
field must be transported to in order for the harvest
operation to be completed. This too is modelled by
its capacity.
The strategy classes define how certain aspects of
the harvest operation are executed. In Figure 1 these
strategies are represented by the Route Strategy, De-
conflict Strategy and Load Strategy classes.
2.1.1 Route Strategy
A route strategy is responsible for constructing the
routes for harvesters. The routes direct the harvester
SIMULTECH 2016 - 6th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
26
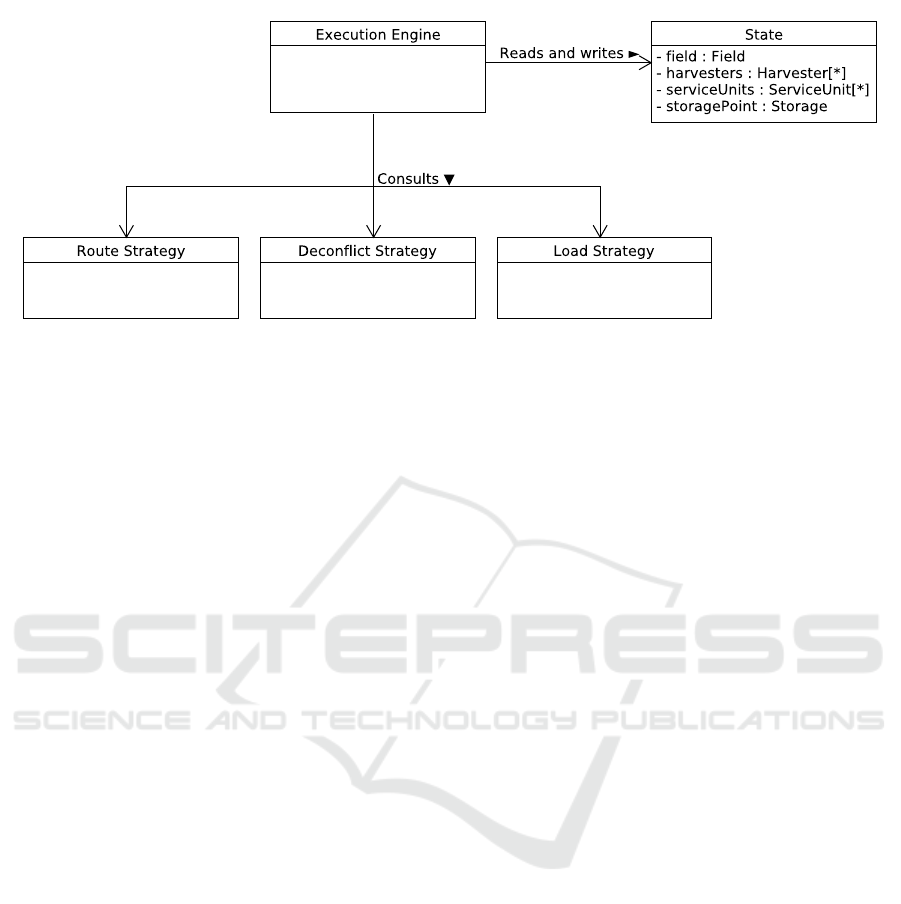
Figure 1: Model structure realised as a UML class diagram.
from its location to a point where it will next re-
quire a service. A similar approach to the planning
of routes for harvesters was also utilised in (Oksanen
and Visala, 2009). In this way the routes for multiple
harvesters can be constructed in a consecutive man-
ner.
As already stated, the construction of routes for
the harvester and grain wagon are dependent on one
another, therefore the route strategy must call func-
tions from the loading strategy to ensure that the har-
vester is able to be serviced at the end of the route.
The route strategies are allowed to produce more than
one possible route for the harvester, these are later dis-
tinguished by the load strategy as appropriate.
Two route strategies have been implemented
within the model: Predefined Route strategy and
Greedy Route strategy.
The Predefined Route strategy enables the model
to execute coverage plans that have been developed
externally, provided they are represented as a se-
quence of rows to harvest. This strategy receives the
assignment of a sequence of rows to a harvester as an
input. A route is constructed which navigates the har-
vester along the sequence of rows, inserting service
points where they are needed.
The Greedy Route strategy employs a search al-
gorithm on the field to create a route for the harvester
which will end with the harvester being as full as pos-
sible and in a position where it can be serviced. An
extra constraint is also implemented within the strat-
egy that every row must be harvested in its entirety
and that all headland rows must be harvested before
work rows.
2.1.2 Deconflict Strategy
A deconflict strategy is responsible for determining
if a vehicle can move along its route, or calculating
new routes if this is not possible. In the Simple De-
conflict strategy a vehicle to reroute is chosen non-
deterministically.
A deconflict strategy is responsible for the infield
coordination of the vehicles. It is possible that con-
flicts can arise when a vehicle may block the path of
another vehicle. In this case the deconflict strategy is
employed to determine what course of action (such as
planning a new route, or waiting for the obstruction to
pass) is to be taken.
The Simple Deconflict strategy ensures that two
vehicles cannot travel towards each other either along
the same row or along two adjacent rows.
2.1.3 Load Strategy
A load strategy is responsible for assisting the route
strategy to find a location where the harvester can
be serviced and for constructing a route for the grain
wagon from its current position to the service point
and then to the out of field storage.
This is done through three functions
of the load strategy that are called by the
route strategy: isDoneExtendingRoute(),
isRouteServiceable(), and finaliseRoute().
isDoneExtendingRoute() checks if it is possi-
ble to extend a harvesters route. A common reason
why it would not be possible to extend a harvester’s
route is if there are no more remaining rows in the
field to be harvested, or if the harvester is full.
finaliseRoute() modifies a harvester’s route to
ensure the final position of the harvester is valid. For
example if harvesting the full length of the final row
of a harvester’s route will cause the harvester to ex-
ceed its capacity, the route is modified so that a ser-
vice point is required at some point along the length
of the final row.
isRouteServiceable() checks that a grain
wagon is able to converge on the service point that
is required by the harvester’s route, for example that
Combining Harvesting Operation Optimisations using Strategy-based Simulation
27

there is a previously harvested row adjacent to the ser-
vice point in which the grain wagon can move.
Four different versions of the load strategy have
been developed in the model. These cover the four
basic ways in which harvesters are unloaded during
grain harvests.
The Single Point Unload version requires the har-
vester to transport material directly to the out of field
storage point without using a grain wagon. It is im-
portant that the harvester must avoid the event of be-
coming full without a navigable path to the out of field
storage. This strategy limits the amount of traffic in
the field, which could offer benefits when reducing
soil compaction.
The Headland Unload version limits the grain
wagon to only travelling in the headland areas of the
field. The harvester must avoid becoming full in the
middle of the field as a grain wagon would not be
able to meet it, therefore service points must be co-
ordinated before the harvester becomes full while it is
turning in the headland area.
The Infield Static Unload version allows the grain
wagons to drive in the working areas of the field in or-
der to meet the harvester. Service points are planned
for the latest possible moment to ensure that the har-
vester is full when it passes its load.
The Infield Moving Unload version is similar to
the Infield Static Unload strategy, however the har-
vester and the grain wagon are both moving when the
load is being passed. As the machines remain in mo-
tion it is imperative that the grain wagon is travelling
in the same direction as the harvester when they meet
at the service point.
The Route, Load and Deconflict strategies are rep-
resented in Figure 1 by their contracts. The various
concrete versions of each strategy must conform to
these contracts. Figure 2 shows how the various load
strategies are realised based on the ILoadStrategy
class that defines the contract. Whenever the model
is executed, a concrete strategy of each kind must be
provided to the Execution Engine.
Not all versions of a strategy can be used in all sit-
uations. In order to cope with this, a notion of strategy
feasibility has been introduced. The strategy feasibil-
ity check is implemented as a function in each of the
strategies and invoked at the beginning of model exe-
cution in order to check if the field meets the require-
ments of the strategy configuration. The advantage of
this approach is that the feasibility of each version of
a strategy is encapsulated in that version itself, so the
remaining parts of the model need not be aware of its
specific details.
The concrete versions of strategies can be used to
model different optimisation algorithms and therefore
vary in implementation detail as well as the restric-
tions they impose on the harvest operation.
3 MODEL IMPLEMENTATION
The model drives the development of a harvest plan-
ning system, which is developed using the Vienna
Development Method (VDM) and implemented us-
ing code generation. VDM is one of the longest-
established formal methods for the development of
computer-based systems. This method focuses on
the development and analysis of a system model ex-
pressed in a formal language.
The strategy pattern is based on object-oriented
(OO) features (Meyer, 1988), as enabled by the
VDM++ formal modelling language (Fitzgerald et al.,
2005). VDM++ is the OO dialect of VDM. Broadly
speaking, a VDM++ model consists of a series of def-
initions for types, functions, operations, etc. The OO
features of VDM++ allow for structuring the model
into classes and provide standard OO mechanisms
such as inheritance.
In addition to allowing for an effective imple-
mentation of the strategy pattern, the OO features
of VDM++ have other useful benefits, including the
ability to add new versions of a strategy that reuse
parts of an existing strategy by changing only those
parts that must be different. Additionally, object-
orientation facilitates modularity and encapsulation
which, while not essential to develop the model, make
it easier to do so.
There are several reasons for choosing a formal
language such as VDM++ over an OO implemen-
tation language such as Java or C++. The use of
VDM++ promotes a high-level approach that ab-
stracts away details that are of little importance to
harvesting operations. The formal semantics under-
pinning the VDM language allow us to have confi-
dence in the results and that there are no errors in the
language and tool that can “contaminate” the result.
Additionally, VDM has features that enable us to de-
scribe the properties of the model and its functions,
and these properties are constantly checked during
model execution. For example, in the model the ca-
pacity is expressed as a floating point number, which
must always be positive and smaller than 1. VDM
invariants allow us to attach such a property to the ca-
pacity variable in order to ensure that the model never
violates this. While that is a simple example, VDM
allows us to express any arbitrary property that can
be described in terms of first-order logic. Many of
the benefits of using VDM cannot be achieved using
implementation languages, which operate at a lower
SIMULTECH 2016 - 6th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
28

Figure 2: Load strategy hierarchy realised as a UML class diagram.
level of abstraction. In particular implementation lan-
guages must take things such as the underlying hard-
ware platform into account. Use of VDM allows us
to focus solely on the development of the strategies,
which is our primary concern.
4 MODEL EXECUTION
In order to execute the model, it is first necessary to
configure the harvest operation by loading both the
field and the resources, i.e. the State, and also one of
each class of strategy to guide the Execution Engine
during the simulation. Once this is done, the model is
executed and whenever the Execution Engine reaches
a point where it needs to make a decision that depends
on a strategy, it will consult whatever strategy it has
loaded and the output of the strategy will be used to
further progress execution of the model. As an ex-
ample, consider Figure 3. In this figure, the Execu-
tion Engine needs to know what vehicles are mov-
able at a given point in time. One particular version
of the strategy may allow the harvesters to move be-
cause they can offload in the work rows. Another ver-
sion may not allow the harvesters to move because
they can only offload in the headlands and they cannot
fully harvest the next work row.
1
In this way, differ-
ent versions of a strategy lead to different outcomes
in the model.
One of the key features of the model is the abil-
ity to explore strategy combinations and how their in-
teractions affect the performance of the harvest op-
eration. One way to do this is by fixing two kinds
of strategies and varying the remainder (for example,
load strategies) thus investigating how a particular as-
pect of optimisation affects the overall harvest oper-
ation. Conversely, if external restrictions dictate the
1
In both of these examples, the route strategy consults the
load strategy as part of its calculation of movable vehicles.
Figure 3: Strategy dispatching realised as a UML sequence
diagram.
use of a particular strategy, then the other strategies
may be manipulated to find the best solution within
the restrictions. For a small number of strategies, test-
ing the different scenarios of interest can be done with
manually written tests. However, when the number
of scenarios to be tested is large then an automated
combinatorial testing feature for VDM can be used
to concisely specify the various combinations and au-
tomatically generate and execute the corresponding
tests (Larsen et al., 2010).
Combining Harvesting Operation Optimisations using Strategy-based Simulation
29
4.1 Simulation Visualisation
As part of model execution, a log of all the important
events in the harvest operation is produced. Logged
events include vehicle movement, harvesting of a row,
passing load between harvesters and grain wagons,
etc. Once execution is completed, this log can be in-
spected in order to get a full understanding of the har-
vest operation outcome. This log can also be seen as a
harvest plan since it contains detailed instructions of
when and where the different vehicles must go.
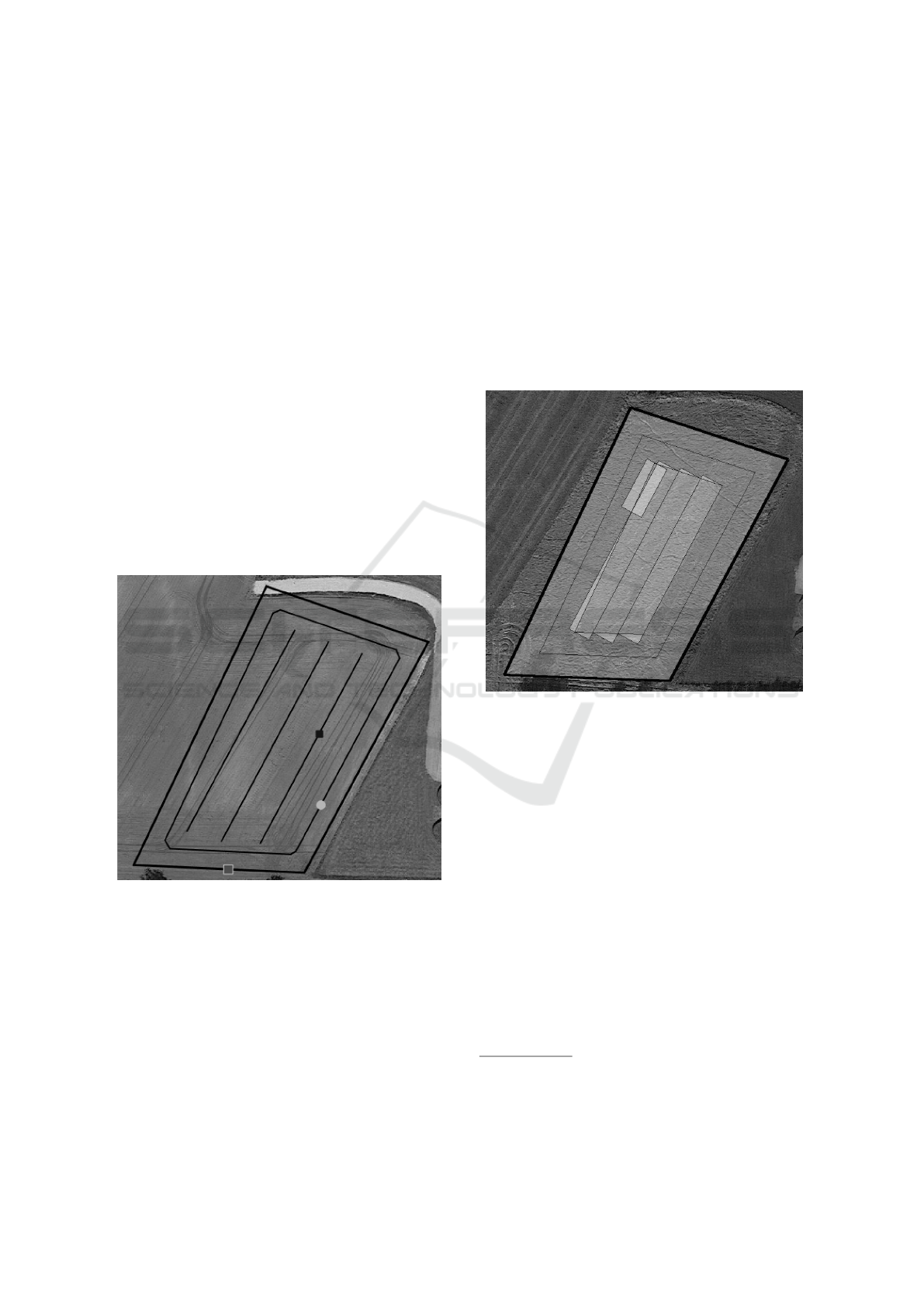
In order to better understand what occurred during
the simulation, the log can also be analysed. However,
as manual inspection of the log is difficult, a proof-of-
concept visualization tool was developed to analyse
the log and replay the simulation as shown in Fig-
ure 4. The figure shows a representation of the field
partitioned into work rows and headlands. The black
square represents the harvester, the circle represents
the grain wagon and the square at the bottom repre-
sents the storage point. As the log is processed, the
visualiser displays an animation of the vehicles mov-
ing along the field.
Figure 4: Simulation visualisation.
5 RESULTS
This section demonstrates the approach by report-
ing results of executing various simulations with the
model in order to explore the interactions between all
possible combinations of the strategies described in
section 2.1. Every execution was performed with the
same resources and on the same field. The focus is
not on changing the parameters of the simulation such
as number of harvesters or harvester capacity but in
changing the strategy versions used in each simula-
tion.
The simulations were carried out on a repre-
sentation of a real field located in the vicinity of
the Research Center at Foulum, Denmark (56°29’N,
9°35’E).
2
The yield of the field is simulated and is
lower for headland rows than for working rows, as is
typical in real fields (due to excess soil damage, lower
nutrients, etc.). The yield is further constrained such
that a complete lap of the field can be made without
exceeding the harvester capacity, and no single work-
ing row can exceed the capacity of the harvester. The
field, partitioned into rows, is shown in Figure 5.
Figure 5: Agro Park field.
The results of the simulations are summarised in
table 1. Each row in the table represents a particular
simulation, indexed by the Sim. (Simulation) column.
The Route and Load columns identify the combina-
tion of strategies used in each particular simulation
(the same deconflict strategy – Simple Deconflict – is
used for all simulations). The Op. Time (Operational
Time) column reports the duration of the harvest op-
eration in seconds and serves as an indication of how
well a combination of strategies performs. Finally the
Exec. Time (Execution Time) column reports the ac-
tual, physical time in seconds it takes to execute the
simulation.
The simulation was executed using a Java 7
code generated version of the model on a Fujitsu
LIFEBOOK U772 laptop with a 1.7GHz Intel Core
i5 processor and 8Gb of memory running a Windows
7 Professional Edition operating system.
2
The model has been applied to representations of various
other fields, both real and invented. However, these results
are not reported here as the focus of this paper is on strat-
egy interaction and not field analysis.
SIMULTECH 2016 - 6th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
30
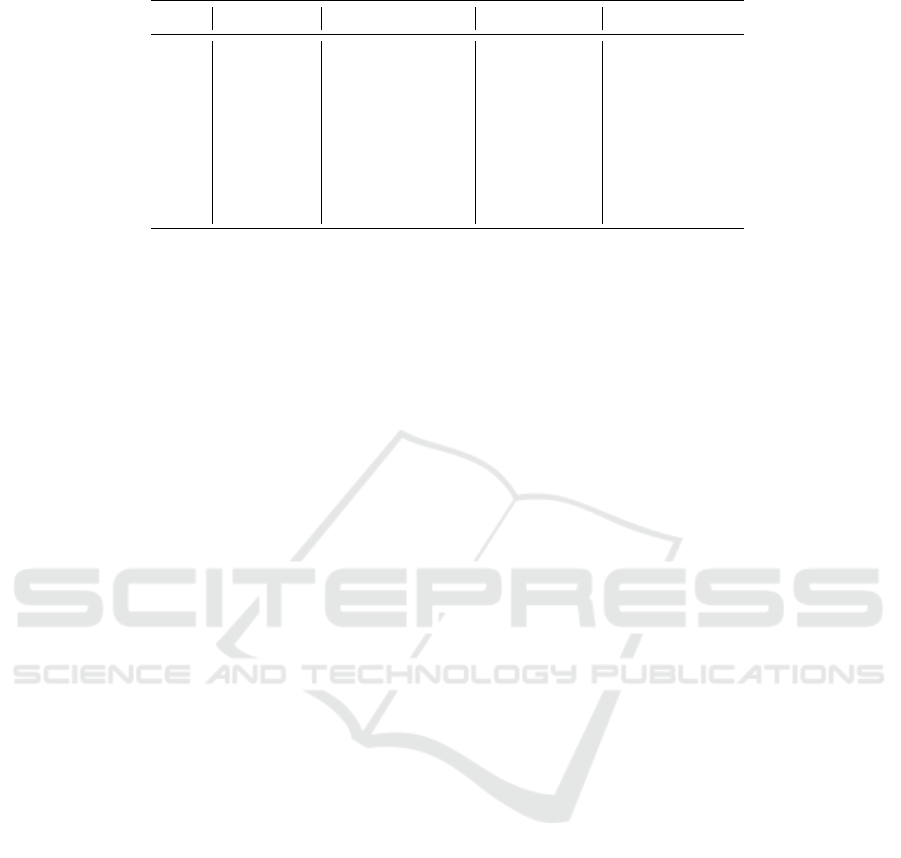
Table 1: Results summary.
Sim. Route Load Op. Time [s] Exec. Time [s]
1 Greedy Headlands 425.558 12.619
2 Predefined Headlands 497.38 13.417
3 Greedy In Field Static 420.694 12.319
4 Predefined In Field Static 463.484 13.912
5 Greedy In Field Moving 410.298 7.056
6 Predefined In Field Moving 446.854 7.25
7 Greedy Single Point 679.498 26.977
8 Predefined Single Point 623.347 4.421
6 DISCUSSION
Table 1 shows that for the field subject to analysis,
for most of the unloading strategies the Greedy Route
strategy produces a better solution, than the Prede-
fined Route strategy as indicated by the operational
time. This is due to the harvesters route used as an in-
put for the Predefined Route strategy being developed
as a coverage plan that ignores the coordination of the
service units. As the Greedy Route strategy was able
to enquire the constraints of the unloading strategy
while developing the harvesters route, the final solu-
tion is more integrated and allows for more efficient
operations. This indicates that it may be advantageous
to use optimisation approaches that consider both har-
vesters and service units when developing routes.
The Infield Moving Unloading strategy offers the
best operational times for both of the routing strate-
gies. This unloading strategy is likely to offer the best
solution as it allows the harvester to be completely full
when it offloads and does not require the harvester to
stop. It is also worth noting that the model allows this
hypothesis to be further confirmed by adding addi-
tional route strategies and checking the resulting op-
erational times.
In terms of actual execution times, most combina-
tions yield similar results for Greedy and Predefined
strategies. The exception is for the Single Point Un-
load strategy, where the Greedy version has a signif-
icantly higher execution time. This is mostly due to
the fact that many more routes have to be computed
for this particular combination, which makes it signif-
icantly slower than its Predefined Route counterpart.
7 CONCLUSIONS AND FUTURE
WORK
In this paper, it has been shown how optimisation al-
gorithms for different aspects of the harvest operation
can be combined. This was achieved using a com-
bination of the strategy pattern and formal modelling
and simulation. The model can be executed with dif-
ferent strategy combinations, yielding harvest times
that can be used to compare the combinations. More
detailed analysis is also enabled by analysing a log
file that is generated for each execution, and which
contains all major events for that particular harvest.
The execution of the model has been demonstrated
on a representation of a real field and a comparison
for the field under analysis has been made based on
the results for 8 strategy combinations.
These results can be generalised to other kinds of
problems where there is a need to combine and com-
pare multiple algorithms for the same operation, but
where there is a significant amount of data and com-
putation required in order to produce meaningful re-
sults.
Looking forward, the work presented in this pa-
per can be taken further by moving the harvest con-
trol to a distributed setting. The current version of
the model assumes a global view of the harvest op-
eration and directly controls the harvest participants
in a sequential manner. In the future, the system can
be moved to a distributed setting where the harvest
participants operate independently and must coordi-
nate and exchange information with each other in or-
der to carry out the harvest plan. This work can be
supported by the use of VDM-RT, a dialect of VDM
that extends VDM++ with support for modelling of
distributed systems (Verhoef, 2009).
Another avenue of future work lies in improving
the performance and scalability of the solution. Al-
though VDM is well suited for modelling and analy-
sis of object-oriented systems, it is not performance-
oriented and therefore the current solution does not
scale well enough to fields of larger sizes (10+ rows).
One potential way to address this is to move some
of the more computationally intensive operations to
a pure Java implementation and utilise the Overture
VDM-Java bridge (Nielsen et al., 2012) to connect
Combining Harvesting Operation Optimisations using Strategy-based Simulation
31

that implementation to the model.
ACKNOWLEDGEMENTS
A previous version of this paper appears in the first
author’s PhD thesis. The work described in this paper
was partially carried out in the context of the Danish
High Technology Foundation research project Off-
line and on-line logistics planning of harvesting pro-
cesses. We would like to thank all our colleagues on
the project for their valuable contributions and feed-
back, particularly Peter Gorm Larsen, Claus Grøn
Sørensen, Dionysis Bochtis and Morten Bilde. We
also thank Kun Zhou for his assistance with the har-
vest visualisation.
REFERENCES
Bochtis, D. and Sørensen, C. (2009). The vehicle routing
problem in field logistics part i. Biosystems Engineer-
ing, 104(4):447–457.
Broenink, J. F., Fitzgerald, J., Gamble, C., Ingram, C.,
Mader, A., Marincic, J., Ni, Y., Pierce, K., and Zhang,
X. (2012). Methodological guidelines 3. Technical
report, The DESTECS Project (INFSO-ICT-248134).
Edwards, G., Christiansen, M. P., Bochtis, D. D., and
Sørensen, C. G. (2013). A test platform for planned
field operations using lego mindstorms nxt. Robotics,
2(4):203–216.
Edwards, G., Jensen, M. A. F., and Bochtis, D. D. (2015).
Coverage planning for capacitated field operations un-
der spatial variability. International Journal of Sus-
tainable Agricultural Management and Informatics,
1(2):120–129.
Fitzgerald, J., Larsen, P. G., Mukherjee, P., Plat, N., and
Verhoef, M. (2005). Validated Designs for Object–
oriented Systems. Springer, New York.
Fitzgerald, J., Larsen, P. G., and Verhoef, M., editors
(2014). Collaborative Design for Embedded Systems
– Co-modelling and Co-simulation. Springer.
Gamma, E., Helm, R., Johnson, R., and Vlissides, R.
(1995). Design Patterns. Elements of Reusable
Object-Oriented Software. Addison-Wesley Profes-
sional Computing Series. Addison-Wesley Publishing
Company.
Hameed, I., Bochtis, D., Sørensen, C., Jensen, A. L., and
Larsen, R. (2013). Optimized driving direction based
on a three-dimensional field representation. Comput-
ers and electronics in agriculture, 91:145–153.
Jensen, M. A. F. (2014). Operations planning for agricul-
tural machinery under capacity constraints. PhD the-
sis, Aarhus University.
Jensen, M. A. F., Bochtis, D., Sørensen, C. G., Blas, M. R.,
and Lykkegaard, K. L. (2012). In-field and inter-field
path planning for agricultural transport units. Com-
puters & Industrial Engineering, 63(4):1054–1061.
Jin, J. and Tang, L. (2010). Optimal coverage path planning
for arable farming on 2d surfaces. Transactions of the
ASABE, 53(1):283.
Larsen, P. G., Lausdahl, K., and Battle, N. (2010). Combi-
natorial Testing for VDM. In Proceedings of the 2010
8th IEEE International Conference on Software Engi-
neering and Formal Methods, SEFM ’10, pages 278–
285, Washington, DC, USA. IEEE Computer Society.
ISBN 978-0-7695-4153-2.
Meyer, B. (1988). Object-oriented Software Construction.
Prentice-Hall International.
Nielsen, C. B., Lausdahl, K., and Larsen, P. G. (2012).
Combining VDM with Executable Code. In Derrick,
J., Fitzgerald, J., Gnesi, S., Khurshid, S., Leuschel,
M., Reeves, S., and Riccobene, E., editors, Abstract
State Machines, Alloy, B, VDM, and Z, volume 7316
of Lecture Notes in Computer Science, pages 266–
279, Berlin, Heidelberg. Springer-Verlag.
Oksanen, T. and Visala, A. (2009). Coverage path planning
algorithms for agricultural field machines. Journal of
Field Robotics, 26(8):651–668.
Scheuren, S., Stiene, S., Hartanto, R., Hertzberg, J., and
Reinecke, M. (2013). Spatio-temporally constrained
planning for cooperative vehicles in a harvesting sce-
nario. KI-K
¨
unstliche Intelligenz, 27(4):341–346.
Spekken, M. and de Bruin, S. (2013). Optimized routing
on agricultural fields by minimizing maneuvering and
servicing time. Precision agriculture, 14(2):224–244.
Tullberg, J. (2010). Tillage, traffic and sustainabilitya chal-
lenge for istro. Soil and Tillage Research, 111(1):26–
32.
Verhoef, M. (2009). Modeling and Validating Distributed
Embedded Real-Time Control Systems. PhD thesis,
Radboud University Nijmegen.
Zandonadi, R. S. (2012). Computational Tools for Improv-
ing Route Planning in Agricultural Field Operations.
PhD thesis, University of Kentucky.
SIMULTECH 2016 - 6th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
32
