
NeuRow: An Immersive VR Environment for Motor-Imagery
Training with the Use of Brain-Computer Interfaces and Vibrotactile
Feedback
Athanasios Vourvopoulos
1,2
, André Ferreira
1
and Sergi Bermudez i Badia
1,2
1
Faculdade das Ciências Exatas e da Engenharia, Universidade da Madeira,
Campus Universitário da Penteada, 9020-105 Funchal, Portugal
2
Madeira Interactive Technologies Institute, Polo Científico e Tecnológico da Madeira,
Caminho da Penteada, 9020-105 Funchal, Portugal
Keywords: Brain-Computer Interfaces, Motor Imagery, Virtual Reality, Serious Games.
Abstract: Motor-Imagery offers a solid foundation for the development of Brain-Computer Interfaces (BCIs), capable
of direct brain-to-computer communication but also effective in alleviating neurological impairments. The
fusion of BCIs with Virtual Reality (VR) allowed the enhancement of the field of virtual rehabilitation by
including patients with low-level of motor control with limited access to treatment. BCI-VR technology has
pushed research towards finding new solutions for better and reliable BCI control. Based on our previous
work, we have developed NeuRow, a novel multiplatform prototype that makes use of multimodal feedback
in an immersive VR environment delivered through a state-of-the-art Head Mounted Display (HMD). In this
article we present the system design and development, including important features for creating a closed
neurofeedback loop in an implicit manner, and preliminary data on user performance and user acceptance of
the system.
1 INTRODUCTION
Motor Imagery (MI) is the mental rehearsal of
movement -without any muscle activation- and is a
mental ability strongly related to the body or
‘embodied’ cognition (Hanakawa, 2015). MI appears
to largely share the control mechanisms and neural
substrates of actual movement both in action
execution and action observation (Eaves et al., 2014),
providing a unique opportunity to study neural
control of movement in either healthy people or
patients (Mulder, 2007; Neuper et al., 2009). Since
MI leads to the activation of overlapping brain areas
with actual movement, and because sensory and
motor cortices can dynamically reorganize (Lledo et
al., 2006; Rossini et al., 2003), MI constitutes an
important component for motor learning and
recovery. Hence, MI has important benefits and is
currently utilized as a technique in
neurorehabilitation for people with neurological
impairments (Dickstein et al., 2013).
MI offers an important basis for the development
of brain-to-computer communication systems called
Brain–Computer Interfaces (BCIs). BCIs are capable
of establishing an alternative pathway between the
brain and a computer or prosthetic devices (Wolpaw
et al., 2002) that could assist (assistive BCI) or
rehabilitate physically (restorative BCI) disabled
people and stroke survivors (Dobkin, 2007).
More recently, Virtual Reality (VR) feedback has
also been used in MI BCI training, offering a more
compelling experience to the user through 3D virtual
environments (Lotte et al., 2013a). The fusion of BCI
and VR (BCI-VR) allows a wide range of experiences
where participants can control various aspects of their
environment -either in an explicit or implicit manner-
, by using mental imagery alone (Friedman, 2015).
This direct brain-to-VR communication can induce
illusions mostly relying on the sensorimotor
contingencies between perception and action (Slater,
2009).
The idea of utilising BCIs in virtual rehabilitation
(virtual reality and tele-medicine for
neurorehabilitation), was fostered in order to
complement current VR rehabilitation strategies
(Bermudez i Badia and Cameirao, 2012; Lange et al.,
Vourvopoulos, A., Ferreira, A. and Badia, S.
NeuRow: An Immersive VR Environment for Motor-Imagery Training with the Use of Brain-Computer Interfaces and Vibrotactile Feedback.
DOI: 10.5220/0005939400430053
In Proceedings of the 3rd International Conference on Physiological Computing Systems (PhyCS 2016), pages 43-53
ISBN: 978-989-758-197-7
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
43

2012) where patients with low level of motor control
–such as those suffering of flaccidity or increased
levels of spasticity (Trompetto et al., 2014)- could not
benefit due to low range of motion, pain, fatique, etc.
The main challenge in the use of BCIs, regardless
of the BCI cost, lies in the lack of reliability and good
performance at the system level that inexperienced
users have (Vourvopoulos and Bermúdez i Badia,
2016) due to BCI “illiteracy” of users (inability of the
user to produce vivid mental images of movement
resulting in poor BCI performance) (Allison and
Neuper, 2010; Vidaurre and Blankertz, 2009).
Although previous studies have shown mixed results,
the combination of haptic and visual feedback seems
to increase the performance (Gomez-Rodriguez et al.,
2011; Hinterberger et al., 2004). It has been shown
that replacing the standard visual BCI feedback with
vibrotactile feedback does not interfere with the EEG
signal acquisition (Leeb et al., 2013) and also does not
impact negatively the classification performance
(Cincotti et al., 2007; Leeb et al., 2013). On the other
hand, it has been shown to have a positive effect on
visual workload measured in a multiple object
tracking task (MOT) where the data revealed
significant differences between visual or tactile
feedback (Gwak et al., 2014). It has also been shown
that with the use of haptic feedback, the user cam pay
more attention to the task instead of to the feedback
(Cincotti et al., 2007), and in (Jeunet et al., 2015)
users achieved higher scores in the vibrotactile
feedback setting. Vibrotactile feedback has also been
used in a hybrid BCI system (Yao et al., 2014), where
MI with selective sensation (SS) were used in order
to increase performance. On this system, equal
vibration is applied to both wrists of the user and
he/she has to imagine that the vibration to one of the
sides is stronger than the other (SS). SS combined
with MI increased the overall performance of the
system. In (Jeunet et al., 2015), it is also reported that
the vibrotactile feedback applied on the user's hand
significantly increases MI performance. In
(Leonardis et al., 2012) the use of vibrotactile
feedback directly applied to certain tendons is used to
convey the illusion of movement to the user, and in
conjunction with a virtual representation of the arm,
significantly increased the accuracy of a BCI system.
Further, recent findings with the use of virtual arms
have shown that the combination of motor priming
(physical rehearsal of a movement) preceding BCI-
VR MI training can improve performance as well as
the capacity to modulate and enhance sensorimotor
brain activity rhythms, important in rehabilitation
research (Vourvopoulos et al., 2015).
In addition, there is an increased need for
alternative motivational mechanisms and feedback
approaches for BCI systems (Lotte, 2012; Lotte et al.,
2013b). Previous research in learning, states that a
poorly designed feedback can actually deteriorate
motivation and impede successful learning (Shute,
2008) while providing extensive feedback to the user
can lead to efficient and high quality learning (Hattie
and Timperley, 2007). Lotte et al. recommended a set
of guidelines for a good instructional design in BCI
training, in which (1) the user should only be
presented with the correct classified action for
enhancing the feeling of competence; (2) provide a
simplified and intuitive task; (3) meaningful and self-
explanatory task; (4) challenging but achievable, with
feedback on progress of achievement; and finally (5)
in an engaging 3D virtual environment (Lotte et al.,
2013b).
To date, and to the best of our knowledge, there is
not a holistic approach in BCI MI training that
combines the advantages of different feedback
modalities (immersive VR environment, vibrotactile
feedback), training aproaches (motor priming
preceding motor observation) and motivational
mechanisms (game-like tasks). Further, in order to be
able to harness the benefits of BCI in
neurorehabilitation, two questions need to be
addressed: (a) how can we increase user performance
in BCI MI training, and (b) how can we maximize the
activation of the brain areas responsible for actual
movement. Answering these questions will enable the
appearance of novel BCI paradigms that will allow us
to promote more efficiently reorganization of
sensorimotor cortices of motor impaired patients
(such as for instance stroke), which ultimately can
lead to higher levels of recovery.
In this paper we describe the development and
pilot assessment of NeuRow, a novel BCI-VR
environment for MI training. NeuRow makes use of
multimodal feedback (auditory, haptic and visual) in
a VR environment delivered through an immersive
Head Mounted Display (HMD), integrated in a BCI
MI training task (left | right hand motor imagery).
Finally, NeuRow is available for different
platforms and is accessible for free at
http://neurorehabilitation.m-iti.org/bci/.
2 METHODOLOGY
2.1 Experimental Setup
The experimental setup was composed by a desktop
computer (OS: Windows 8.1, CPU: Intel® Core™ i5-
2400 at 3.10 GHz, RAM: 4GB DDR3 1600MHZ,
PhyCS 2016 - 3rd International Conference on Physiological Computing Systems
44

Graphics: AMD Radeon HD 6700), running the
acquisition software, the BCI-VR task, HMD, EEG
system, and a vibrotactile module.
EEG Acquisition
The BCI system consisted of 8 active electrodes
equipped with a low-noise biosignal amplifier and a
16-bit A/D converter at 256 Hz (g.MOBIlab+
biosignal amplifier, g.tec, Graz, Austria). The spatial
distribution of the electrodes followed the 10-20
system configuration (Klem et al., 1999) with the
following electrodes over the somatosensory and
motor areas: Frontal-Central (FC5, FC6), Central
(C1, C2, C3, C4), and Central-Parietal (CP5, CP6)
(Figure 1 a). The signal amplifier was connected via
bluetooth to the desktop computer for the EEG signal
acquisition. EEG data acquisition and processing was
performed through the OpenVibe platform (Renard et
al., 2010). Finally, the data from OpenVibe was
transmitted to the RehabNet Control Panel
(Reh@Panel) (Vourvopoulos et al., 2013) via the
VRPN protocol (Taylor et al., 2001) to control the
virtual environment. The RehabNet Control Panel is
a free tool that acts as a middleware between multiple
interfaces and virtual environments.
Feedback Presentation
For delivering feedback to the user, the Oculus Rift
DK1 HMD was used (Oculus VR, Irvine, California,
USA). The HMD is made of one 7" 1280x800 60 Hz
LCD display (640x800 resolution per eye), one
aspheric acrylic lens per eye, 110° Field of View
(FOV), internal tracking through a gyroscope,
accelerometer, and magnetometer, with a tracking
frequency of 1000Hz (Figure 1 b).
Vibrotactile Feedback
A custom vibrotactile feedback module was
developed with out-of-the-box components including
an Arduino Mega 2560 board and vibrating motors.
The vibrating motors (10mm diameter, 2.7mm thick)
performed at 11000 RPM at 5V and were mounted on
cylindrical tubes that acted as grasping objects for
inducing the illusion of movement during the BCI
task (Figure 1 c). In our setup, a pair of carton-based
tubes with 12cm of length and 3cm diameter were
used. Finally, 3D printed cases were produced to
accommodate the vibrating motors inside the tubes.
All hardware and software blueprints are made
available for free online.
2.2 BCI Task Design
BCI-VR Training Protocol
The training protocol was designed and adapted based
on the Graz-BCI paradigm (Pfurtscheller et al., 2003),
substituting the standard feedback presented
(directional arrows) by multimodal VR feedback. The
first step of the training consist on the acquisition of
the raw EEG data in order to train a linear
discriminant classifier to distinguish Right and Left
imagined hand movements. Throughout the training
session, the user has to perform mental imagery of the
corresponding hand (based on the presented stimuli).
For each hand, the user is stimulated both visually
(VR action observation) and haptically through the
vibration on the corresponding hand (Figure 2 a). The
training session was configured to acquire data in 20
blocks (epochs) per class (Right or Left hand
imagery) in a randomized order. Following the
training, the data is used to compute a Common
Spatial Patterns (CSP) filter, a spatial filter that
maximizes the difference between the signals of the
two classes. Finally, the raw EEG and the spatial filter
are used to train a Linear Discriminant Analysis
(LDA) classifier.
Figure 1: Experimental setup (a) EEG cap with 8 active
electrodes, (b) HMD, (c) vibrotactile modules, (d) BCI
feedback.
NeuRow: An Immersive VR Environment for Motor-Imagery Training with the Use of Brain-Computer Interfaces and Vibrotactile Feedback
45

Figure 2: Neurofeedback loop. (a) During the training session, the user is performing in a randomized order MI combined
with motor observation of the virtual hands rowing while vibrotactile feedback is delivered to the corresponding hand. (b)
The user relies on MI alone in order to control the virtual hands in a closed-loop system after training.
BCI-VR Task
The BCI-VR task was designed based on literature
and previous work, incorporating important features
for a successful brain-to-computer interaction in
terms of feedback, protocol design, and accessibility.
The BCI-VR task involves boat rowing through
mental imagery only with the goal of collecting as
many flags as possible in a fixed amount of time.
NeuRow is a self-paced BCI neurogame, meaning
that is not event related, and the user controls the
timing of rowing actions like he/she would do in real-
life (Figure 2 b). NeuRow is a multiplatform virtual
environment developed in Unity game engine (Unity
Technologies, San Francisco, California, USA).
Finally, NeuRow is optimized for different platforms,
however with different features (Table 1). Namely:
- Desktop: The standalone version for PC,
supports high quality graphics for an immersive VR
experience with the support of the Oculus Rift DK1
headset, the Leap Motion hand controller (Motion
control, San Francisco, California, USA) available for
optional motor-priming before the MI BCI session.
Finally, vibrotactile feedback is supported through
the use of custom made hardware for controlling
through USB up to 6 vibration motors. Data logging
is supported for boat trajectory, target location, score
and time.
- Mobile: The mobile version is built for
Android OS devices, receiving data via the RehabNet
UDP protocol through the Reh@panel. For phones,
the VR feature is utilized for VR glasses (e.g. Google
Cardboard) by applying lens correction for each eye,
and using the phone gyroscope and magnetometer for
head tracking, offering an immersive experience
similar to the Oculus DK1 and DK2 HMDs.
- Web browser: The web version uses the Unity
web player (compatible through Internet Explorer,
Firefox or Opera), does not support the networking,
HMD and haptic components due to security
restrictions. Instead, the web NeuRow acquires data
through emulated keyboard events generated by the
Reh@panel.
The in-game interface is simple, with two high
fidelity virtual arms to rotate the oars, time indication,
score and navigational aids (Figure 3). NeuRow can
be customized with different settings, depending on
the experimental setup, BCI paradigm and running
platform. Through the settings, one can chose if the
session is part of MI training or self-paced online
control session for navigation of the boat. During
Table 1: NeuRow features for the different supported
platforms.
Features/
Platform
Desktop Android Web
Logging ✓ X X
VR ✓
(Oculus)
✓
(Google
Cardboard)
X
Hand
Tracking
✓
(Leap
Motion)
X X
Networking ✓ ✓ X
Platform
Independent
X X ✓
Vibrotactile
Feedback
✓
(Arduino)
X X
PhyCS 2016 - 3rd International Conference on Physiological Computing Systems
46

Figure 3: In-game interface. An arrow indicates the direction of the target and also the distance by changing its colour (red
for far blending up to green for close). Top Left: Remaining time for the end of the session. Middle: A flag with a ray acts as
the game targets, Top Right: Game scoring, counting the amount of targets.
training, the navigational arrow and the targets are
removed to focus the user only on the multimodal MI
BCI-VR task. During self-paced mode, the behaviour
of the boat can be changed by setting the heading
speed, turn speed and cut-off angle. The cut-off angle
is the allowed angle that the boat can turn with respect
to the target flag before stopping. This serves as a
protection mechanism to help the player not to
deviate in excess from the target.
2.3 Participants
A voluntary sample of 13 users (mean age of 28 ± 5
years old) was recruited for the pilot study, based on
their motivation to participate in the study. All
participants were male and right handed with no
previous known neurological disorder, nor previous
experience in BCIs. Participants were either
university students or academic staff. Finally, all
participants provided their written informed consent
before participating in the study.
2.4 Questionnaires
Before each BCI training session, demographics and
user data were gathered through the following
questionnaires:
- The Vividness of Movement Imagery
Questionnaire-2 (VMIQ2) was used to assess the
capability of the participant to perform an
imagined movement (Kinesthetic Imagery)
(Roberts et al., 2008). Kinesthetic Imagery (KI)
questions were combined with mental
chronometry by measuring the response time in
perceptual-motor tasks with the help of a timer.
- For assessing gaming experience we used the
Gamer Dedication (GD) questionnaire, a 15 factor
classification questionnaire in which participants
are asked whether they "strongly disagree," or
"strongly agree" with a series of statements about
their gaming habits (Adams and Ip, n.d.).
After the BCI task, the following questionnaires
were administered:
- The NASA TLX questionnaire was used to
measure task load considering Mental Demand,
Physical Demand, Temporal Demand,
Performance, Effort and Frustration (Hart and
Staveland, 1988).
- The core modules of the Game Experience
Questionnaire (GEQ) were used at the end of the
BCI session. GEQ assesses game experience
using Immersion, Flow, Competence, Positive
and Negative Affect, Tension, and Challenge
(IJsselsteijn et al., 2008).
- The System Usability Scale (SUS) is a ten-item
scale giving a global view of subjective
assessments of usability (Brooke, 1996).
NeuRow: An Immersive VR Environment for Motor-Imagery Training with the Use of Brain-Computer Interfaces and Vibrotactile Feedback
47

Figure 4: Ranked accuracy of performance in pure MI based BCI studies using two-classes (left and right hand imagery) with
respect to LDA classification (Boostani and Moradi, 2004; Garcia et al., 2003; Obermaier et al., 2001; Solhjoo and Moradi,
2004). The asterisk (*) over 4,5,7,8,9,10 and 12 (Vourvopoulos et al., 2015; Vourvopoulos and Bermúdez i Badia, 2016)
indicates studies which use the same feature extraction method (BP with CSP). The data of this study corresponds to the 4
th
best.
2.5 Data Analysis
Power Spectral Density (PSD)
EEG signals were processed in Matlab (MathWorks
Inc., Massachusetts, US) with the EEGLAB toolbox
(Delorme and Makeig, 2004) for extracting the Power
Spectral Density (PSD). The power spectrum was
extracted for the following frequency rhythms: Alpha
(8 Hz - 12 Hz), Beta (12 Hz - 30 Hz), Theta (4 Hz - 7
Hz), and Gamma (25 Hz - 90 Hz). Independent
Component Analysis (ICA) was used for removing
major artefacts related with power-line noise, eye
blinking, ECG and EMG activity. For the current
analysis, and because we were only measuring from
sensory-motor areas, data were averaged for all the
channels for each experimental condition.
Engagement Index
The Engagement Index (EI) is a metric proposed at
NASA Langley for evaluating operator engagement in
automated tasks, was validated through a bio-cybernetic
system for Adaptive Automation (Pope et al., 1995), and
is widely used in EEG studies for assessing engagement
(Berka et al., 2007). We therefore computed
engagement index from the EEG power spectrum
according to equation: EI = β/(α+θ), where α = Alpha
band, β = Beta band and θ = Theta band.
3 RESULTS
In the following section we analyse NeuRow’s BCI
task performance in terms of classifier score during
training, user acceptance as assessed by the SUS,
GEX and TLX questionnaires, and finally the
relationship between game behaviour and user
experience through the questionnaires and also the
EEG activity.
3.1 Performance
Comparing the performance score with previous
studies which used LDA classifiers in two class (left,
right hand) MI, we are able to gain insights
concerning the effectiveness of our BCI-VR
paradigm in terms of user control (Boostani and
Moradi, 2004; Garcia et al., 2003; Obermaier et al.,
2001; Solhjoo and Moradi, 2004). As illustrated in
Figure 4, the comparison places NeuRow as the
fourth highest with a mean performance of 70.7% out
of 12 studies. Moreover, of those studies that used
exactly the same feature extraction technique of band
power (BP) and CSP (Vourvopoulos et al., 2015;
Vourvopoulos and Bermúdez i Badia, 2016),
NeuRow scores the highest. Finally, of those studies
that used VR as a training environment
(Vourvopoulos et al., 2015), again NeuRow scores
first.
3.2 User Acceptance
To assess different aspects of the user experience
during online control of NeuRow, the mental
workload, gaming experience and system usability
were assessed after the task.
PhyCS 2016 - 3rd International Conference on Physiological Computing Systems
48
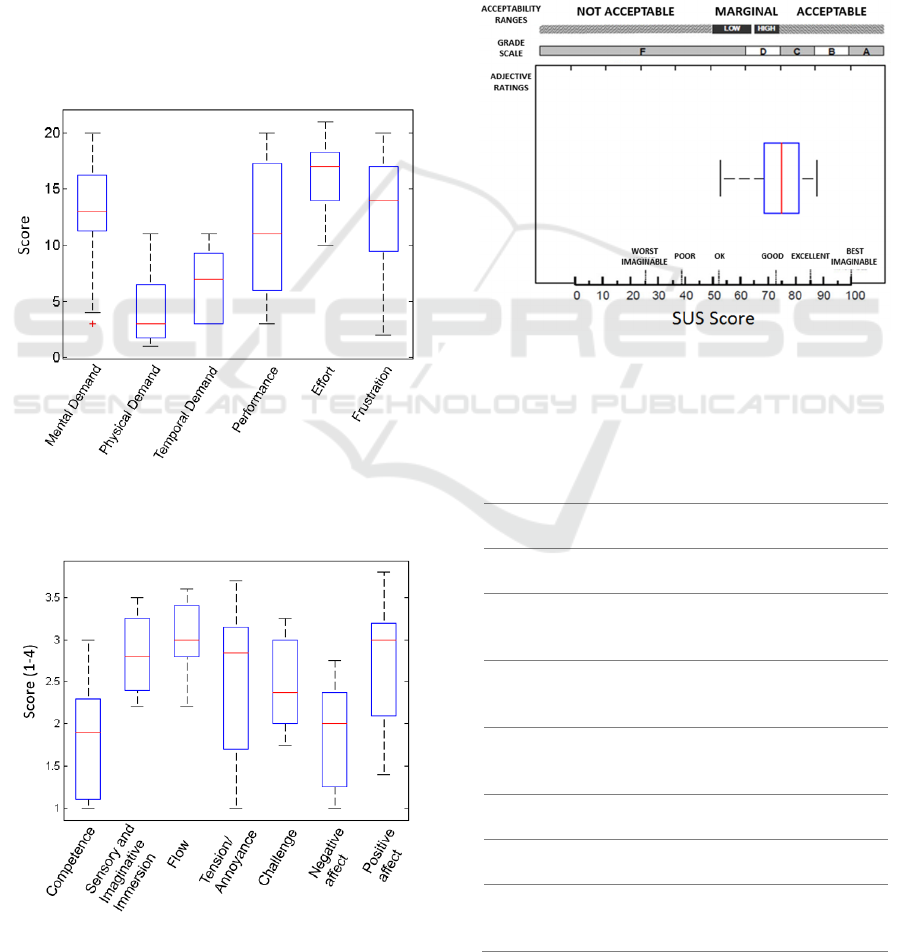
For workload, the NASA-TLX mean score was
relatively high at 66.8/100 (SD = 14.5). As it is
illustrated in Figure 5, the two lowest scores are those
for physical (M = 4.4, SD = 3.4) and temporal (M =
6.5, SD = 3) demand. The highest score is on effort
(M = 16.4, SD = 5.2) followed closely by frustration
(M = 13.3, SD = 5.2) and mental demand (M = 12.8,
SD = 5). Performance lies in the middle (M = 11.4,
SD = 6.2).
From the GEQ, we extracted seven domains based
on the sub-scale scoring. The highest score is in flow
(M = 3.1, SD = 0.4) followed by immersion (M = 2.8,
SD = 0.4) and positive affect (M = 2.8, SD = 0.7). A
moderate score is achieved on tension/annoyance (M
= 2.5, SD = 0.9) and challenge (M = 2.5, SD = 0.5).
Finally, competence (M = 1.8, SD = 0.7) and negative
affect scored the lowest (Figure 6).
Figure 5: TLX scores between 1-20 for mental demand,
physical demand, temporal demand, performance, effort
and frustration.
Figure 6: Scores for the GEQ core questionnaire domains.
The system usability assessed by the SUS scored
a mean of 74 (SD = 7.2). Based on the SUS rating
scale (Figure 7), our system is classified as “Good”
and it is within the acceptability range (Bangor et al.,
2009).
3.3 User-Profile and in-Game
Behaviour
By assessing the relationship of the reported
experience and the EEG activity with the in-game
behaviour (score, distance, speed, trajectory) we
Figure 7: SUS results for all users. Acceptability scales are
displayed on top (not acceptable, marginal and acceptable),
followed by the grade scale (A to F) and the adjective rating
(0-100).
Table 2: Correlation table between reported experience,
extracted EEG bands and in-game behaviour.
Distance Speed Score Smooth
ness
TLX:
Total
-.695 -.699 -.697
TLX:
Perfor
mance
-.595 -.599
TLX:
Frustr
ation
-.728 -.737 -.686
Mental
Chron
ometry
.618 .615 .728
Alpha
band
-.611 -.607
Theta
band
-.672 -.670
Engage
ment
Index
-.770 -.768 -.649 -.595
NeuRow: An Immersive VR Environment for Motor-Imagery Training with the Use of Brain-Computer Interfaces and Vibrotactile Feedback
49

identified a set of correlations. As illustrated in Table
2, the total workload correlates with distance, speed
and score. In addition, two TLX sub-domains have
correlations. Performance is significantly correlated
with distance and speed, as well as frustration is
significantly correlated with distance, speed and
score. Furthermore, mental chronometry (the
response time in perceptual-motor tasks),
significantly correlates with distance, speed and
score. Finally, from the extracted EEG bands and the
resulting Engagement Index, we can see that Alpha
and Theta bands are reversely correlated with
distance and speed. Finally, Engagement Index is
interestingly correlated with all in-game metrics. In
particular for distance, speed, score and trajectory
smoothness.
4 CONCLUSIONS
In this paper we presented the design, development
and pilot evaluation of NeuRow, a novel BCI-VR
system for MI training. In terms of classification
performance, the NeuRow BCI training paradigm
showed a high performance, scoring the first amongst
other studies with similar feature extraction and
classification methodologies. These data supports a
positive effect of the combination of immersive VR
and vibrotactile feedback to help users to produce
vivid MI (resulting in more distinct activation of
sensorimotor areas of the brain), which in turn that
can lead to increased performance and learning
(Sigrist et al., 2013). Furthermore, from the user
experience point of view, we can see high mental
effort as given by the TLX scales and low physical
and temporal demands. Previous research in
distinguishing difficulty levels with brain activity
measurements indicated an average mental workload
index of 26 (SD = 12.9) for the easy level, and 69 (SD
= 7.9) for the hard level (Girouard et al., 2009). The
combination of low physical demand (useful in low
mobility patients), increased effort (a conscious
exertion of power) and good classification
performance (better control that can lean in goal
achievement), constitutes a very promising finding
for the incorporation of this technology in stroke
rehabilitation, providing new possibilities for
rehabilitation programs. Moreover, increased flow
and immersion to the task, in combination with
increased positive affect, are good elements for
enjoyment of NeuRow that can be capitalized on to
further motivate and engage users in their BCI
training. From the correlation analysis between user
experience -subjectively measured through
questionnaires but also objectively measured through
EEG activity- and in-game behaviour, we can see that
people with increased workload will perform worse.
Interestingly, we can see that users with fast response
time in MI ability (as extracted from the mental
chronometry assessment) performed better in the
game, being it then an indicator of increased
capability of MI. Having a fast and vivid sensation of
kinesthetic imagery can be related to an increased
modulation of sensorimotor rhythms (Neuper et al.,
2005), resulting in better BCI calibration and hence
higher in-game performance. In addition, the reverse
correlation of the Engagement index with all the in-
game variables shows an important connection
between user engagement and in-game behaviour.
This relationship can help in developing a
neurofeedback closed loop were the engagement of
the user is used to adjust parameters of the game. This
would allow a dynamic adjustment of the game based
on user performance and cognitive state. This could
provide (1) a major assistance for new users and/or
neurologically impaired people and (2) reduced levels
of frustration and workload.
Overall, we showed that NeuRow, combining the
use of immersive VR environment, sensory
stimulation and motor-priming features, can provide
a holistic approach towards MI driven BCIs. In this
study we showcased user performance, user
acceptance and important features for closing the loop
in an implicit manner. Finally, NeuRow’s features
show promise and potential to be used for MI training
in stroke motor rehabilitation. Future work will
include a study with stroke patients with the ultimate
goal to clinically validate NeuRow in a longitudinal
MI-BCI study with functional brain imaging.
ACKNOWLEDGEMENTS
This work was supported by the European
Commission through the RehabNet project -
Neuroscience Based Interactive Systems for Motor
Rehabilitation - EC (303891 RehabNet FP7-
PEOPLE-2011-CIG), by the Fundação para a Ciência
e Tecnologia (Portuguese Foundation for Science and
Technology) through SFRH/BD/97117/2013, and
LARSyS (Laboratório de Robótica e Sistemas em
Engenharia e Ciência) through
UID/EEA/50009/2013. Software and instructions are
available online in the following address:
http://neurorehabilitation.m-iti.org/bci/.
PhyCS 2016 - 3rd International Conference on Physiological Computing Systems
50

REFERENCES
Adams, E., Ip, B., n.d. From Casual to Core: A Statistical
Mechanism for Studying Gamer Dedication [WWW
Document]. URL http://www.gamasutra.com/view/fea
ture/131397/from_casual_to_core_a_statistical_.php
(accessed 1.5.15).
Allison, B.Z., Neuper, C., 2010. Could Anyone Use a BCI?,
in: Tan, D.S., Nijholt, A. (Eds.), Brain-Computer
Interfaces, Human-Computer Interaction Series.
Springer London, pp. 35–54.
Bangor, A., Kortum, P., Miller, J., 2009. Determining What
Individual SUS Scores Mean: Adding an Adjective
Rating Scale. J Usability Stud. 4, 114–123.
Berka, C., Levendowski, D.J., Lumicao, M.N., Yau, A.,
Davis, G., Zivkovic, V.T., Olmstead, R.E., Tremoulet,
P.D., Craven, P.L., 2007. EEG Correlates of Task
Engagement and Mental Workload in Vigilance,
Learning, and Memory Tasks. Aviat. Space Environ.
Med. 78, B231–B244.
Bermudez i Badia, S., Cameirao, M.S., 2012. The
Neurorehabilitation Training Toolkit (NTT): A Novel
Worldwide Accessible Motor Training Approach for
At-Home Rehabilitation after Stroke. Stroke Res. Treat.
2012. doi:10.1155/2012/802157.
Boostani, R., Moradi, M.H., 2004. A new approach in the
BCI research based on fractal dimension as feature and
Adaboost as classifier. J. Neural Eng. 1, 212–217.
doi:10.1088/1741-2560/1/4/004.
Brooke, J., 1996. SUS-A quick and dirty usability scale.
Usability Eval. Ind. 189, 194.
Cincotti, F., Kauhanen, L., Aloise, F., Palomäki, T.,
Caporusso, N., Jylänki, P., Mattia, D., Babiloni, F.,
Vanacker, G., Nuttin, M., Marciani, M.G., Millán, J. del
R., 2007. Vibrotactile Feedback for Brain-Computer
Interface Operation. Comput. Intell. Neurosci. 2007,
e48937. doi:10.1155/2007/48937.
Delorme, A., Makeig, S., 2004. EEGLAB: an open source
toolbox for analysis of single-trial EEG dynamics
including independent component analysis. J.
Neurosci. Methods 134, 9–21. doi:10.1016/j.jneumeth
.2003.10.009.
Dickstein, R., Deutsch, J.E., Yoeli, Y., Kafri, M., Falash,
F., Dunsky, A., Eshet, A., Alexander, N., 2013. Effects
of Integrated Motor Imagery Practice on Gait of
Individuals With Chronic Stroke: A Half-Crossover
Randomized Study. Arch. Phys. Med. Rehabil. 94,
2119–2125. doi:10.1016/j.apmr.2013.06.031.
Dobkin, B.H., 2007. Brain-computer interface technology
as a tool to augment plasticity and outcomes for
neurological rehabilitation. J. Physiol. 579, 637–642.
doi:10.1113/jphysiol.2006.123067.
Eaves, D.L., Haythornthwaite, L., Vogt, S., 2014. Motor
imagery during action observation modulates automatic
imitation effects in rhythmical actions. Front. Hum.
Neurosci. 8. doi:10.3389/fnhum.2014.00028.
Friedman, D., 2015. Brain-Computer Interfacing and
Virtual Reality, in: Nakatsu, R., Rauterberg, M.,
Ciancarini, P. (Eds.), Handbook of Digital Games and
Entertainment Technologies. Springer Singapore, pp.
1–22.
Garcia, G.N., Ebrahimi, T., Vesin, J., 2003. Support vector
EEG classification in the Fourier and time-frequency
correlation domains, in: First International IEEE EMBS
Conference on Neural Engineering, 2003. Conference
Proceedings. Presented at the First International IEEE
EMBS Conference on Neural Engineering, 2003.
Conference Proceedings, pp. 591–594. doi:10.1109/C
NE.2003.1196897.
Girouard, A., Solovey, E.T., Hirshfield, L.M., Chauncey,
K., Sassaroli, A., Fantini, S., Jacob, R.J.K., 2009.
Distinguishing Difficulty Levels with Non-invasive
Brain Activity Measurements, in: Gross, T., Gulliksen,
J., Kotzé, P., Oestreicher, L., Palanque, P., Prates, R.O.,
Winckler, M. (Eds.), Human-Computer Interaction –
INTERACT 2009, Lecture Notes in Computer Science.
Springer Berlin Heidelberg, pp. 440–452.
Gomez-Rodriguez, M., Peters, J., Hill, J., Schölkopf, B.,
Gharabaghi, A., Grosse-Wentrup, M., 2011. Closing
the sensorimotor loop: haptic feedback facilitates
decoding of motor imagery. J. Neural Eng. 8, 036005.
doi:10.1088/1741-2560/8/3/036005.
Gwak, K., Leeb, R., Millan, J.D.R., Kim, D.-S., 2014.
Quantification and reduction of visual load during BCI
operation, in: 2014 IEEE International Conference on
Systems, Man and Cybernetics (SMC). Presented at the
2014 IEEE International Conference on Systems, Man
and Cybernetics (SMC), pp. 2795–2800. doi:10.1109/
SMC.2014.6974352.
Hanakawa, T., 2015. Organizing motor imageries.
Neurosci. Res. doi:10.1016/j.neures.2015.11.003.
Hart, S.G., Staveland, L.E., 1988. Development of NASA-
TLX (Task Load Index): Results of Empirical and
Theoretical Research, in: Meshkati, P.A.H. and N.
(Ed.), Advances in Psychology, Human Mental
Workload. North-Holland, pp. 139–183.
Hattie, J., Timperley, H., 2007. The Power of Feedback.
Rev. Educ. Res. 77, 81–112. doi:10.3102/003465430
298487.
Hinterberger, T., Neumann, N., Pham, M., Kübler, A.,
Grether, A., Hofmayer, N., Wilhelm, B., Flor, H.,
Birbaumer, N., 2004. A multimodal brain-based
feedback and communication system. Exp. Brain Res.
154, 521–526. doi:10.1007/s00221-003-1690-3.
IJsselsteijn, W., Poels, K., de Kort, Y.A., 2008. The Game
Experience Questionnaire: Development of a self-
report measure to assess player experiences of digital
games. TU Eindh. Eindh. Neth.
Jeunet, C., Vi, C., Spelmezan, D., N’Kaoua, B., Lotte, F.,
Subramanian, S., 2015. Continuous Tactile Feedback
for Motor-Imagery Based Brain-Computer Interaction
in a Multitasking Context, in: Abascal, J., Barbosa, S.,
Fetter, M., Gross, T., Palanque, P., Winckler, M. (Eds.),
Human-Computer Interaction – INTERACT 2015,
Lecture Notes in Computer Science. Springer
International Publishing, pp. 488–505.
Klem, G.H., Lüders, H.O., Jasper, H.H., Elger, C., 1999.
The ten-twenty electrode system of the International
Federation. The International Federation of Clinical
NeuRow: An Immersive VR Environment for Motor-Imagery Training with the Use of Brain-Computer Interfaces and Vibrotactile Feedback
51

Neurophysiology. Electroencephalogr. Clin.
Neurophysiol. Suppl. 52, 3–6.
Lange, B., Koenig, S., Chang, C.-Y., McConnell, E., Suma,
E., Bolas, M., Rizzo, A., 2012. Designing informed
game-based rehabilitation tasks leveraging advances in
virtual reality. Disabil. Rehabil. 34, 1863–1870.
Leeb, R., Gwak, K., Kim, D.-S., del R Millán, J., 2013.
Freeing the visual channel by exploiting vibrotactile
BCI feedback. Conf. Proc. Annu. Int. Conf. IEEE Eng.
Med. Biol. Soc. IEEE Eng. Med. Biol. Soc. Annu. Conf.
2013, 3093–3096. doi:10.1109/EMBC.2013.6610195.
Leonardis, D., Frisoli, A., Solazzi, M., Bergamasco, M.,
2012. Illusory perception of arm movement induced by
visuo-proprioceptive sensory stimulation and
controlled by motor imagery, in: 2012 IEEE Haptics
Symposium (HAPTICS). Presented at the 2012 IEEE
Haptics Symposium (HAPTICS), pp. 421–424.
doi:10.1109/HAPTIC.2012.6183825.
Lledo, P.-M., Alonso, M., Grubb, M.S., 2006. Adult
neurogenesis and functional plasticity in neuronal
circuits. Nat. Rev. Neurosci. 7, 179–193. doi:10.1038
/nrn1867.
Lotte, F., 2012. On the need for alternative feedback
training approaches for BCI. Presented at the Berlin
Brain-Computer Interface Workshop.
Lotte, F., Faller, J., Guger, C., Renard, Y., Pfurtscheller, G.,
Lécuyer, A., Leeb, R., 2013a. Combining BCI with
Virtual Reality: Towards New Applications and
Improved BCI.
Lotte, F., Larrue, F., Mühl, C., 2013b. Flaws in current
human training protocols for spontaneous Brain-
Computer Interfaces: lessons learned from instructional
design. Front. Hum. Neurosci. 7, 568. doi:10.3389/fn
hum.2013.00568.
Mulder, T., 2007. Motor imagery and action observation:
cognitive tools for rehabilitation. J. Neural Transm.
114, 1265–1278. doi:10.1007/s00702-007-0763-z.
Neuper, C., Scherer, R., Reiner, M., Pfurtscheller, G., 2005.
Imagery of motor actions: differential effects of
kinesthetic and visual-motor mode of imagery in single-
trial EEG. Brain Res. Cogn. Brain Res. 25, 668–677.
doi:10.1016/j.cogbrainres.2005.08.014.
Neuper, C., Scherer, R., Wriessnegger, S., Pfurtscheller, G.,
2009. Motor imagery and action observation:
Modulation of sensorimotor brain rhythms during
mental control of a brain–computer interface. Clin.
Neurophysiol. 120, 239–247. doi:10.1016/j.clinph.20
08.11.015.
Obermaier, B., Guger, C., Neuper, C., Pfurtscheller, G.,
2001. Hidden Markov models for online classification
of single trial EEG data. Pattern Recognit. Lett.,
Selected Papers from the 11th Portuguese Conference
on Pattern Recognition - RECPAD2000 22, 1299–
1309. doi:10.1016/S0167-8655(01)00075-7.
Pfurtscheller, G., Neuper, C., Müller, G.R., Obermaier, B.,
Krausz, G., Schlögl, A., Scherer, R., Graimann, B.,
Keinrath, C., Skliris, D., Wörtz, M., Supp, G., Schrank,
C., 2003. Graz-BCI: state of the art and clinical
applications. IEEE Trans. Neural Syst. Rehabil. Eng.
Publ. IEEE Eng. Med. Biol. Soc. 11, 177–180.
doi:10.1109/TNSRE.2003.814454.
Pope, A.T., Bogart, E.H., Bartolome, D.S., 1995.
Biocybernetic system evaluates indices of operator
engagement in automated task. Biol. Psychol., EEG in
Basic and Applied Settings 40, 187–195.
doi:10.1016/0301-0511(95)05116-3.
Renard, Y., Lotte, F., Gibert, G., Congedo, M., Maby, E.,
Delannoy, V., Bertrand, O., Lécuyer, A., 2010.
OpenViBE: an open-source software platform to
design, test, and use brain-computer interfaces in real
and virtual environments. Presence Teleoperators
Virtual Environ. 19, 35–53.
Roberts, R., Callow, N., Hardy, L., Markland, D., Bringer,
J., 2008. Movement imagery ability: development and
assessment of a revised version of the vividness of
movement imagery questionnaire. J. Sport Exerc.
Psychol. 30, 200–221.
Rossini, P.M., Calautti, C., Pauri, F., Baron, J.-C., 2003.
Post-stroke plastic reorganisation in the adult brain.
Lancet Neurol. 2, 493–502.
Shute, V.J., 2008. Focus on Formative Feedback. Rev.
Educ. Res. 78, 153–189. doi:10.3102/003465430731
3795.
Sigrist, R., Rauter, G., Riener, R., Wolf, P., 2013.
Augmented visual, auditory, haptic, and multimodal
feedback in motor learning: a review. Psychon. Bull.
Rev. 20, 21–53. doi:10.3758/s13423-012-0333-8.
Slater, M., 2009. Place illusion and plausibility can lead to
realistic behaviour in immersive virtual environments.
Philos. Trans. R. Soc. Lond. B Biol. Sci. 364, 3549–
3557. doi:10.1098/rstb.2009.0138.
Solhjoo, S., Moradi, M., 2004. Mental task recognition: A
comparison between some of classification methods, in:
BIOSIGNAL 2004 International EURASIP Conference.
pp. 24–26.
Taylor, R.M., II, Hudson, T.C., Seeger, A., Weber, H.,
Juliano, J., Helser, A.T., 2001. VRPN: A Device-
independent, Network-transparent VR Peripheral
System, in: Proceedings of the ACM Symposium on
Virtual Reality Software and Technology, VRST ’01.
ACM, New York, NY, USA, pp. 55–61.
doi:10.1145/505008.505019.
Trompetto, C., Marinelli, L., Mori, L., Pelosin, E., Currà,
A., Molfetta, L., Abbruzzese, G., 2014.
Pathophysiology of Spasticity: Implications for
Neurorehabilitation. BioMed Res. Int. 2014.
doi:10.1155/2014/354906.
Vidaurre, C., Blankertz, B., 2009. Towards a Cure for BCI
Illiteracy. Brain Topogr. 23, 194–198. doi:10.100
7/s10548-009-0121-6.
Vourvopoulos, A., Bermúdez i Badia, S., 2016. Usability
and Cost-effectiveness in Brain-Computer Interaction:
Is it User Throughput or Technology Related?, in:
Proceedings of the 7th Augmented Human
International Conference, AH ’16. ACM, Geneva,
Switzerland. doi:10.1145/2875194.2875244.
Vourvopoulos, A., Cardona, J.E.M., Badia, S.B. i, 2015.
Optimizing Motor Imagery Neurofeedback through the
Use of Multimodal Immersive Virtual Reality and
PhyCS 2016 - 3rd International Conference on Physiological Computing Systems
52

Motor Priming. Presented at the 2015 International
Conference on Virtual Rehabilitation (ICVR).
Vourvopoulos, A., Faria, A.L., Cameirao, M.S., Bermudez
i Badia, S., 2013. RehabNet: A distributed architecture
for motor and cognitive neuro-rehabilitation, in: 2013
IEEE 15th International Conference on E-Health
Networking, Applications Services (Healthcom).
Presented at the 2013 IEEE 15th International
Conference on e-Health Networking, Applications
Services (Healthcom), pp. 454–459. doi:10.1109/He
althCom.2013.6720719.
Wolpaw, J.R., Birbaumer, N., McFarland, D.J.,
Pfurtscheller, G., Vaughan, T.M., 2002. Brain-
computer interfaces for communication and control.
Clin. Neurophysiol. Off. J. Int. Fed. Clin. Neurophysiol.
113, 767–791.
Yao, L., Meng, J., Zhang, D., Sheng, X., Zhu, X., 2014.
Combining motor imagery with selective sensation
toward a hybrid-modality BCI. IEEE Trans. Biomed.
Eng. 61, 2304–2312. doi:10.1109/TBME.2013.2287
245.
NeuRow: An Immersive VR Environment for Motor-Imagery Training with the Use of Brain-Computer Interfaces and Vibrotactile Feedback
53
