
Dynamic Restoration in Interconnected
RBAC-based Cyber-physical Control Systems
Cristina Alcaraz
1
, Javier Lopez
1
and Kim-Kwang Raymond Choo
2
1
Computer Science Department, University of Malaga, Campus de Teatinos s/n, 29071, Malaga, Spain
2
School of Information Technology & Mathematical Sciences, University of South Australia, Adelaide, South Australia
Keywords:
Structural Controllability, Cyber-physical Systems, Security, Role-Based Access Control, Resilience.
Abstract:
Increasingly, automatic restoration is an indispensable security measure in control systems (e.g. those used in
critical infrastructure sectors) due to the importance of ensuring the functionality of monitoring infrastructures.
Modernizing the interconnection of control systems to provide interoperability between different networks, at
a low cost, is also a critical requirement in control systems. However, automated recovery mechanisms are
currently costly, and ensuring interoperability particularly at a low cost remains a topic of scientific challenge.
This is the gap we seek to address in this paper. More specifically, we propose a restoration model for inter-
connected contexts, taking into account the theory of supernode and structural controllability, as well as the
recommendations given by the IEC-62351-8 standard (which are mainly based on the implementation of a
role-based access control system).
1 INTRODUCTION
Cost-effective automated recovery mechanisms that
also ensure interoperability has been the subject of
various research efforts. For example, in our ear-
lier work (Alcaraz et al., 2016), we seek to promote
resilience capacities in the interconnection of cyber-
physical systems (CPSs), using existing restoration
approaches such as those specified in (Alcaraz and
Wolthusen, 2014). In this paper, we extend our pre-
vious work in (Alcaraz et al., 2016) by considering
the conceptual representation of controllability to il-
lustrate control contexts through the concept of struc-
tural controllability (introduced by Lin (Lin, 1974)).
We then present an interconnection model to illus-
trate real contexts where the interoperability between
CPSs has to be supported by both (i) policy en-
forcement points (PEPs) together with point decision
points (PDPs), and (ii) the Role-Based Access Con-
trol (RBAC)-based least privilege scheme defined by
the IEC-62351-8 standard (IEC-62351-8, 2011).
The IEC-62351-8 is part of the IEC-62351 se-
ries (IEC-62351, 2011) which establishes end-to-end
security in control systems and the protection of
the communication channels. Concretely, the IEC-
62351-8 recognizes the RBAC model as a potentially
efficient mechanism for wide use in control systems
and distributed services. Only authorized users and
automated agents can gain access to restricted data
objects, which may be located at distant geographi-
cal points and close to the observation scenario (e.g.,
substations). Moreover, through RBAC it is possible
to reallocate system controls and their security as de-
fined by the organization policy, where the purpose is:
(i) to introduce authorization aspects under the condi-
tion of subjects-roles-rights where a limited number
of roles can represent many entities or IEC-61850 ob-
jects (IEC-61850, 2003); (ii) boost role-based access
control in the power system management; and (iii)
enable heterogeneity and audited interoperability be-
tween the different elements of a CPS (e.g., sensors,
meters, IEC-61850 objects etc.).
We also follow a decentralized network architec-
ture as represented in Figure 1, which is based on
supernode theory (Samuel et al., 2011) where a set
of control entities can apply for access via PEP re-
quests and specialized nodes known as supernodes
(i.e., PDPs). These PEP petitions are based on au-
thentication tokens that allow each entity to connect
with the closest PDPs, and these PDPs act as proxies
to provide peer-to-peer communication via the Inter-
net (see Figure 1). However, this connection is not
direct, since these proxies have to be connected to the
gateways (e.g., remote terminal units (RTUs)) that are
responsible for monitoring all incoming and outgo-
ing communications at the respective substations (i.e.,
Alcaraz, C., Lopez, J. and Choo, K-K.
Dynamic Restoration in Interconnected RBAC-based Cyber-physical Control Systems.
DOI: 10.5220/0005942000190027
In Proceedings of the 13th International Joint Conference on e-Business and Telecommunications (ICETE 2016) - Volume 4: SECRYPT, pages 19-27
ISBN: 978-989-758-196-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
19

Figure 1: General architecture taking into account the network model given in (Alcaraz et al., 2016).
CPSs).
To conceptually characterize these interconnected
systems, the architecture has to be formalized us-
ing graph theory to embed the concept of struc-
tural controllability, such that G
i
(V,E) depicts a con-
trol subnetwork where V constitutes the control de-
vices or objects (e.g., IEC-61850, RTUs, smart sen-
sors, meters, and servers) and E the communication
links. Each distribution, G
i
(V,E), illustrates power-
law structures of the type y ∝ x
α
in order to repre-
sent realistic scenarios, such as those stated in (Pa-
gani and Aiello, 2013). In our case, we examine
pure power-law or scale-free distributions, such as
Power-Law Out-Degree (PLOD) with α (connectiv-
ity degree) ∼ 0.1,0.2 (Palmer and Steffan, 2000) or
Barab
´
asi-Albert (BA) model with α ∼ 3 (Albert and
Barab
´
asi, 2002). Under such a configuration, the con-
trol is injected through two fundamental observation
rules simplified by Kneis (Kneis et al., 2006), adapted
from the original formulation (Haynes et al., 2002):
OR1 A vertex in N
D
observes itself and all its neigh-
bours, where OR1 is closely linked to the DOMI-
NATING SET problem.
OR2 If an observed vertex v of degree d ≥ 2 is adja-
cent to d − 1 observed vertices, then the remain-
ing unobserved vertex becomes observed as well
(OR1 ⊆ OR2).
The resulting set, denoted as N
D
, holds the mini-
mum set of driver nodes (n
d
) and supports the concept
of the POWER DOMINATING SET problem (Haynes
et al., 2002). Moreover, both rules produce hierarchi-
cal control graphs with several roots as access points.
Thus, an easy way to simplify the model would be
to impose a relationship between roots and a unique
gateway, where the roots follow the gateway. How-
ever, such a relationship entails adapting the algo-
rithm ‘Structural Controllability in SuperNode Sys-
tems’ of (Alcaraz et al., 2016) which require compli-
ance with the following interconnection conditions:
C1 keep the acyclicity of the network and the direc-
tion of control (e.g., a → b) from the gateway; and
C2 keep OR1 and OR2 at all times.
We now propose including additional restoration
capacities to safeguard the security, safety and stabil-
ity levels at high values, to satisfy both interconnec-
tion conditions [C1, C2], as well as requiring the con-
trol to be transparent to specific roles. As mentioned
in (Alcaraz et al., 2016), some of these roles and rights
have already been specifed by the IEC-62351-8 stan-
dard, which reserves: (i) seven roles for power and
control applications, (ii) 32.760 reserved for security
applications within the IEC-62351, and (iii) 32.767
for private use. From this set of reserves, we only
consider the seven defined by the standard, which are
also defined in Table 1.
Apart from the reserve suite, RBAC favors dy-
namic control by introducing the concept of dynamic
separation of duty (DSD), also defined in (Alcaraz
et al., 2016). Through DSD the system can allow any
authorized personnel with specific roles and rights
(e.g., Operator and SECADM with control rights) to
execute specific actions in the field so as to rapidly
manage a critical situation and in time. In the worst
cases, it also allows secondary roles to be activated to
attend to the situation. In this way, the system not
only refuses the temporary access to other entitites
SECRYPT 2016 - International Conference on Security and Cryptography
20
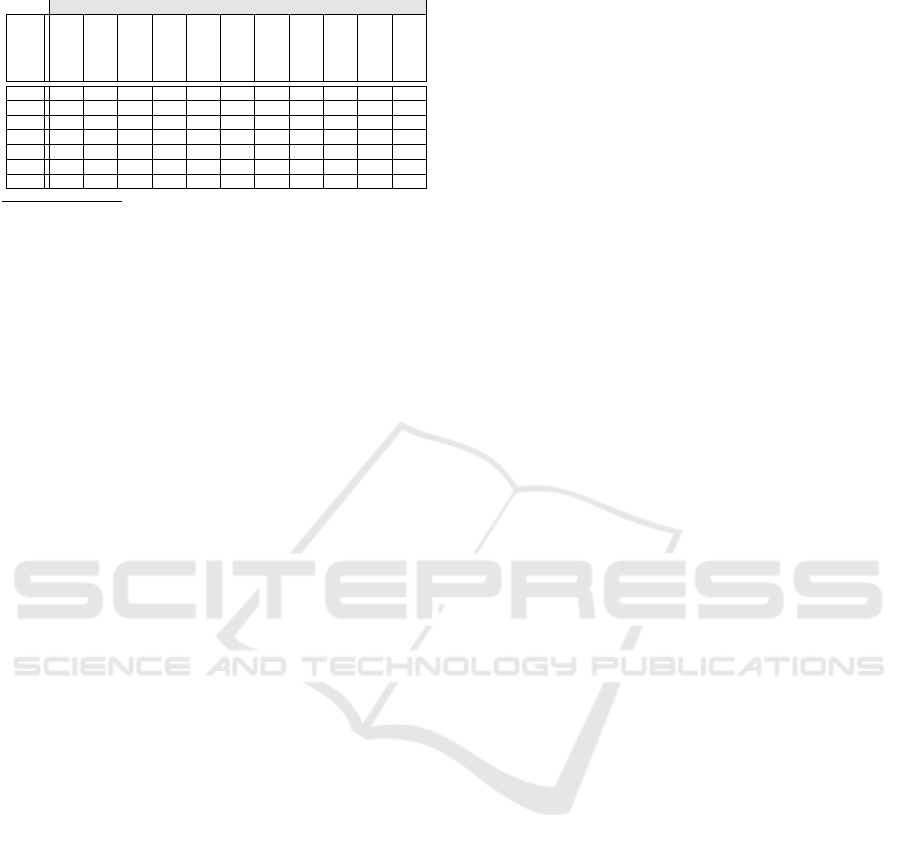
Table 1: Roles and rights belonging to IEC-62351-8.
Rights associated with IEC-62351-8 roles
Roles
View
Read
Dataset
Reporting
Fileread
Filewrite
Filemgnt
Control
Config
Settinggroup
Security
V
a
X X
O
b
X X X X
E
c
X X X X X X X
I
d
X X X X X
S
e
X X X X X X X X X
S
f
X X X X
R
g
X X X X X
a
Viewer: capacity to view data objects.
b
Operator: capacity to view data objects and values, and perform control.
c
Engineer: capacity to view data objects and values, access datasets and files, and
configure servers.
d
Installer: capacity to view data objects and values, write files and configure
servers.
e
SECADM: capacity to manage users-roles-rights, and change security setting.
f
SECAUD: capacity to audit the system by viewing audit logs.
g
RBACMNT: hereditary role from the SECADM with only the ability to manage
roles and rights.
(e.g., access to Viewers or Installers) but also avoids
the saturation of the communication channels.
However, although the dynamic access in critical
situations benefits the management in the field, the
use of RBAC does not, in any way, guarantee the re-
silience in the field. It is also necessary to adapt au-
tomatic protection mechanisms with the capacity to
solve a determined situation. This feature is precisely
what differs this research from our previous work (Al-
caraz et al., 2016), where the goal was only to provide
access to critical environments in a less restrictive sit-
uation. Namely, the control in (Alcaraz et al., 2016)
is always possible from anywhere and at time, but it
does not consider the restoration measures required in
crisis situations and resilience assurance.
The dynamic preservation of control structural
properties generally results in additional computa-
tional costs (Alcaraz and Wolthusen, 2014), where
surprisingly there is lack of literature to provide guid-
ance on the selection of suitable restoration tech-
niques. For example, Nakayama et al. (Nakayama
et al., 2012) use tie-set notions in order to implement
ring-based solutions against link failures. A variant
of this solution is the rapid spanning tree protocol
(RSTP), an evolution of the spanning tree protocol
(STP), which can be used to manage traffic loops and
broadcast congestion in mesh topologies (Marchese
and Mongelli, 2012). Tree-like structures are also ap-
plied to group and activate, via a nice tree decom-
position, backup instances of driver nodes in charge
of delivering control signals to the rest of the nodes
in the network (Alcaraz and Wolthusen, 2014), or
to build edge-redundant networks to activate backup
links (Alcaraz and Wolthusen, 2014; M
´
edard et al.,
1999; Quattrociocchi et al., 2014). Therefore, more
research is required to address issues relating to re-
silience against adversarial influences in critical con-
texts, particularly in a real-world situation.
The rest of this paper is organized as follows. Sec-
tion 2 introduces the restoration model for strongly in-
terconnected environments, and the correctness proof
and complexity. Section 3 demonstrates the validity
using a case study composed of different experimen-
tal simulations. Finally, Section 4 concludes the paper
and outlines future work.
2 POWER DOMINANCE IN CPSS
In this section, we adapted our previous work (Al-
caraz and Wolthusen, 2014) via an extension using
Algorithm 2.1 in order to repair damages caused by
the removal of edges (e.g., isolations or disconnec-
tions of a few links), and damages caused by the ad-
dition of new edges, probably due to the insertion of
false data injection attacks. More specifically, the ap-
proach proposed in this paper will provide the follow-
ing reparation strategies:
• re-link without parametrization (STG-1) with a
complexity cost of O
n
2
;
• re-link based on the search of those nodes with a
minimum diameter (STG-2) of O
n
2
; and
• the use of backups of N
D
through a tree-like struc-
ture based on a tree decomposition (STG-3) of ex-
ponential order.
Of the three reparation strategies, our research
principally focuses on STG-2 as the computational
cost is less than STG-3, and the parametrization helps
restrict the restoration processes. As for structural
changes and their detection, the gateways have to pe-
riodically measure the diameter (e.g., using breadth-
first search of O
n
) to verify the real reach of a de-
termined node, and validating, in this case, the degree
of accessibility from/to the gateway. Once structural
changes have been detected, Algorithm 2.1 verifies
the acyclicity of the network in order to satisfy the
first condition [C1]. If it contains cycles caused by the
injection of edges, then it first needs to clean the loops
and then check for unobserved nodes and restore
those nodes without observation (possibly caused by
the removal of cycles) through the strategy STG-x,
such that x = {1, 2, 3} (Alcaraz and Wolthusen, 2014).
Although restoration is ensured at this point, the
condition of keeping the direction of control from the
gateway still needs to be addressed. To do this, the
procedure CONNECT TO GATEWAY has to search for
each n
d
i
∈ N
D
(i.e., driver nodes with no parent) to
connect to the gateway such that (gateway, n
d
i
) ∈ E.
However, these new connections force us to consider
Dynamic Restoration in Interconnected RBAC-based Cyber-physical Control Systems
21
Algorithm 2.1: Resilience (G (V,E),N
D
,gateway,A,U
a
).
output (N
D
)
local n
d
,or1, or2;
or2
b
← false ; or1 ← false ;
comment: Stage 1: repair due to insertion of edges.
if isDAG(G (V,E))
then
G(V, E) ← Cycle Removal
c
(G(V, E));
U ← Unobserved Nodes
d
(G(V, E),N
D
);
or1 ← true ; or2 ← true ;
comment: Stage 2: repair due to removal of edges, as specified
comment: in (Alcaraz and Wolthusen, 2014).
while U 6=
do
Randomly choose a vertex u ∈ U;
if u /∈ N
D
then
N
D
← Restoration Scheme (STG−x,G(V, E),
N
D
,u,A);
or1 ← true ;
{G(V, E),or1, or2} ← Connect to Gateway(G(V, E),gateway);
if or1
then
n
N
D
← Observation Completeness(G(V,E),N
D
,or2);
return (verifyOR2(G (V,E),N
D
,A,or2)))
e
a
U: Set of unobserved nodes; A: set of attacked nodes
b
or2 is a boolean variable required for verifyOR2.
c
CYCLE REMOVAL is a procedure that can adapt the Berger-Shor algo-
rithm for DAG defined in (Healy and Nikolov, 2013) of O
n
2
.
d
UNOBSERVED NODES is a procedure that obtains the unobserved
nodes when topological changes arise because of a perturbation (an attack
or a failure), cycles or the unsuitable insertion of new links for connectivity
with the gateway (see Algorithm 2.2).
e
VERIFYOR2 is a verification procedure of OR2 defined in (Alcaraz
and Wolthusen, 2014).
updating, at least, the variable or1 (to true) declared
in Algorithm 2.1 as it is necessary to revise the obser-
vation completeness (i.e., verify the achievement of
OR1) and the fulfilment of OR2 (or2). This process
is reflected in Algorithm 2.3 where the set of unob-
served nodes (U ) is obtained. With this set, the algo-
rithm first imposes the first observation rule, in which
the unobserved nodes, u
i
, have to be included as part
of the N
D
to ensure the observation, at least, in them-
selves. However, this imposition also comprises a
verification process of OR2 through the VERIFYOR2,
which is specified in (Alcaraz and Wolthusen, 2014).
The computation of both procedures for the observa-
tion completeness involves a computational cost of
O
kn
+ O
n
2
= O
n
2
if we consider n ∼| N
D
| and
k =| U | in the worst case scenario.
2.1 Correctness and Complexity
The correctness proof of the dynamic restoration
problem is demonstrated when the following require-
ments are satisfied:
Algorithm 2.2: Unobserved Nodes (G(V, E),N
D
).
output (U )
local n
d
,U ← V \ N
D
,DS
a
← , N
b
← ;
while (U 6= )
do
Randomly choose a vertex n
d
∈ N
D
;
if n
d
/∈ (N
D
∪ N)
then
DS ← DS ∪{n
d
};
for each v ∈ V
do
if (n
d
,v) ∈ E
then
(
N ← N ∪ {v};
U ← U \ {v};
U ← U \ {n
d
};
return (U)
a
DS includes the set of drivers that complies with OR1.
b
N represents the set of neighbour nodes of a particular node.
Algorithm 2.3: Observation Completeness (G(V,E),N
D
.).
output (N
D
)
local v, u,U, N;
U ← Unobserved Nodes(G(V, E),N
D
);
while (U 6= )
a
do
Randomly choose a vertex u ∈ U;
if u /∈ (N
D
∪ N)
then
N
D
← N
D
∪ {u};
for each v ∈ V
do
if (u,v) ∈ E
then
(
N ← N ∪ {v};
U ← U \ {v};
U ← U \ {u};
or2 ← true ;
return (N
D
)
a
This loop represents the worst scenario due to a breach of OR1.
• the algorithm ensures controllability without vi-
olating the control structural properties, C1 and
C2, and correctly establishes connection with the
gateway (restoration);
• the algorithm is able to correctly complete in a
finite time (termination); and
• the algorithm is able to complete, guaranteeing
C1 and C2 at any moment (validity).
It is clear that if a node v
i
is not observed by a
driver node, then the control at that moment is not se-
cure. However, if there exists a driver node with the
minimum diameter, STG-2 automatically establishes
connectivity with v
i
; otherwise, STG-2 includes {v
i
}
in N
D
so as to force the observation, at least, of itself
(complying with OR1). Although the observation is
already guaranteed at this point by STG-2, review-
ing is also required of the connectivity to the gateway
SECRYPT 2016 - International Conference on Security and Cryptography
22

and the observation degree to maintain OR1 (through
Algorithm 2.3) and OR2 (through VERIFYOR2 (Al-
caraz and Wolthusen, 2014)) at all times.
In relation to termination of the algorithm, we first
define the initial and final conditions, follow by the
base cases to study the induction:
• Pre-condition: the set of attacked nodes, A, is not
empty (A 6= ) with existence (or not) of cycles,
and U 6= or U = .
• Post-condition: no cycles (C1), U = , and both
OR1 and OR2 are fulfilled (C2).
• Case 1: there are no cycles after perturbations and
U = .
At this point, it is only necessary to verify the
secure connection to the gateway. However, this
procedure require variables or1 and or2 to be true;
thus, the procedures OBSERVATION COMPLETE-
NESS and VERIFYOR2 have to be performed in
order to comply with C1 and C2. After this,
the post-condition is accomplished as there are
no cycles, U = , and VERIFYOR2 always com-
pletes. Indeed the fulfilment of OR2 through
VERIFYOR2 is always successfully managed, and
the verification procedure is analysed in (Alcaraz
and Wolthusen, 2014).
• Case 2: there are no cycles after the attack, and
U 6= such that |U | = 1.
Under this condition, the instruction while is
reached and the algorithm has to check the ob-
servation degree for each unobserved node u
i
(in
this case, for just one unobserved node). To do
this, Algorithm 2.1 first needs to trust restoration
procedures STG-x, where x = 1,2,3, the value of
which is defined as an input parameter −. We re-
mark that the correctness of this last part has been
demonstrated in (Alcaraz and Wolthusen, 2014).
After restoration, U is updated since U \ {u
i
}.
This updating is effective in each iteration until
set U is empty. After this, the connection with
the gateway must be checked, and the observa-
tion completeness and the VERIFYOR2 algorithm
have to be executed to verify OR1 and OR2 as
detailed in Case 1 of this proof.
• Case 3: there are cycles after the perturbation and
U = . This means that the acyclicity test has not
been achieved properly, and it is necessary to re-
move the cycles using CYCLE REMOVAL. How-
ever, this procedure may cause the following situ-
ations:
– the elimination of loops produces changes in U
such that |U| > 0. To obtain the new set of un-
observed nodes, it is necessary to execute Algo-
rithm 2.2. If |U
new
| = 1, Case 2 of this proof is
considered; otherwise, the induction described
below must be carried out for k iterations.
– The removal of edges does not produce changes
in U and Algorithm 2.2 verifies that |U| = 0.
This also means that the instruction while is not
going to be performed, but it needs to check
the connection level with the gateway and the
observation degree (see Case 1 of the current
proof).
At the end of these two points, the algorithm en-
sures that U = ; C1 and C2 are satisfied; and the
post-condition becomes true; thus, Algorithm 2.1
terminates.
• Case 4: there are cycles after perturbation, but
the cardinality of set U ≥ 1. This condition forces
Algorithm 2.1 to execute instructions if and while
and results in the following cases, respectively:
– CYCLE REMOVAL produces new changes in
the set of unobserved nodes such that |U
new
| ≥
|U| ≥ 1. In this case, point one of Case 3 makes
sense (and in the induction defined below).
– CYCLE REMOVAL does not produce changes in
U but |U| ≥ 1 due to perturbations. Given this,
the induction and/or Case 2 take place.
• Induction: in step k of the while (with k > 1) with
U 6= , k = |U| and |N
D
| ≥ 1, we randomly se-
lect a node u
i
∈ U in each iteration of the loop.
Once it has been chosen, Algorithm 2.1 proceeds
to repair the control conditions related to u
i
. In
this case, the selected strategy STG-x, such that
= 1,2,3. At the end of the algorithm execution,
set U and k (and even, the set of N
D
and observed
nodes O, such O ∼ ((V − U ) − N
D
)) are always
updated through U = U \{u
i
}.
In the next state, with k −1, the procedure adopted
is still valid, indicating that the post-condition has
not yet been met (because U 6= ), and the loop
must be repeated for the next state k until k = 0.
When this occurs, Case 1 of this proof must be
verified to conclude that the post-condition is true;
therefore, Algorithm 2.1 ends.
To prove the termination of Algorithm 2.3, we ex-
plore:
• Pre-condition: or1 is true because U 6= .
• Post-condition: U = and OR1 is met.
• Case 1: U 6= such that |U| = 1. Algorithm 2.3
attempts to repair the observation by including u
i
∈ U as part of N
D
such that U = U \ {u
i
}. How-
ever, this implies reviewing the neighborhood of
u
i
in order to comply with OR1. As this procedure
Dynamic Restoration in Interconnected RBAC-based Cyber-physical Control Systems
23
may cause the new observed vertex u
i
with d ≥ 2
to be adjacent to d − 1 observed vertices, the sec-
ond observation rule has to be validated through
VERIFYOR2.
• Induction: When k = |U| ≥ 1, the loop must be
executed for each u
i
in U, where Case 1 needs to
also be considered and k has to be updated with
k − 1 each time.
Note that these two termination proofs state that
the latter requirement described above (i.e., the valid-
ity) is also satisfied because Algorithm 2.1 finishes
and ensures that the two observation rules are pro-
vided at all times without acyclicity.
As for computational costs in the worst case sce-
nario, Algorithm 2.1 requires adding the complex-
ity of the acyclicity test (with O
n
), the removal of
cycles (O
n
2
if we apply Berger-Shor (Healy and
Nikolov, 2013)), and the verification process of OR1
with O
n
2
as defined in (Alcaraz and Wolthusen,
2014). On the other hand, the complexity associ-
ated with STG-x (see (Alcaraz and Wolthusen, 2014))
together with the cost of connection to the gateway
(O
n
(since ∀ n
d
i
∈ N
D
has no parent), the system
establishes a new connection (gateway,n
d
i
) ∈ E) and
the observation completeness (O
n
2
− see Section
2). As STG-2 has been chosen for our experimental
studies with O
n
2
, the total computation cost of Al-
gorithm 2.1, therefore, remains at a quadratic order.
3 RESULTS AND DISCUSSION
The experiments presented in this section were based
on the architecture given in (Alcaraz et al., 2016),
where the conceptual part of networks (PLOD with
α = 0.1,0.2 and BA with α = 3) were implemented in
Matlab and the part of PDPs were developed in Java
(following the recommendations given by the IEC-
62351-8 standard). For the authentication in each
CPS, an LDAPv3 server, through the Apache Direc-
tory Studio
T M
(Studio, 2013), was configured so as
to manage the access token; and for the insertions
in the authentication server, we followed the RFC-
2798 (Smith, 2010) under the attribute inetOrgPer-
son:userCertificate so as to store the encoded X.509
certificates together with relevant information asso-
ciated with granted roles and rights. Based on this
implementation, we simulated a critical scenario for
20 minutes, where |V |/2 random nodes were tar-
geted each time. This critical scenario was composed
of the interconnection of three independent power-
law networks (representing independent CPSs: CPS
1
,
CPS
2
and CPS
3
) with different scales: 100-500 nodes
(small networks), 500-1000 (medium networks), and
≥ 1000 nodes (large networks).
For the context management, two criticality
thresholds, denoted as MaxCCont and MinCCont
with values of 0.85 and 0.25 respectively, were de-
fined in order to outline the accessibility degree.
Namely, MaxCCont drawn the border to activate the
DSD mechanism of the RBAC as defined in (Alcaraz
et al., 2016). At this point, the value of the context
and its limitation to MaxCCont were continuously
controlled by specialised context managers, also spec-
ified in (Alcaraz et al., 2016) and depicted in Figure 1.
These managers, integrated in each PDP, were respon-
sible for checking the criticality degree of a network
in relation to the accessibility degree of the protected
objects. To do this, these managers received, from
their closest gateways, information relating to the rate
of unobserved nodes that infringed OR1. In contrast,
MinCCont refers to the critical point at which a com-
plete restoration of the system is required. If we ob-
serve Figures 2 and 3, MinCCont < MaxCCont <
100.0%, such that 100.0% denotes the criticality rate
of the best case scenario in which we do not assume
risks associated with disconnections and isolations.
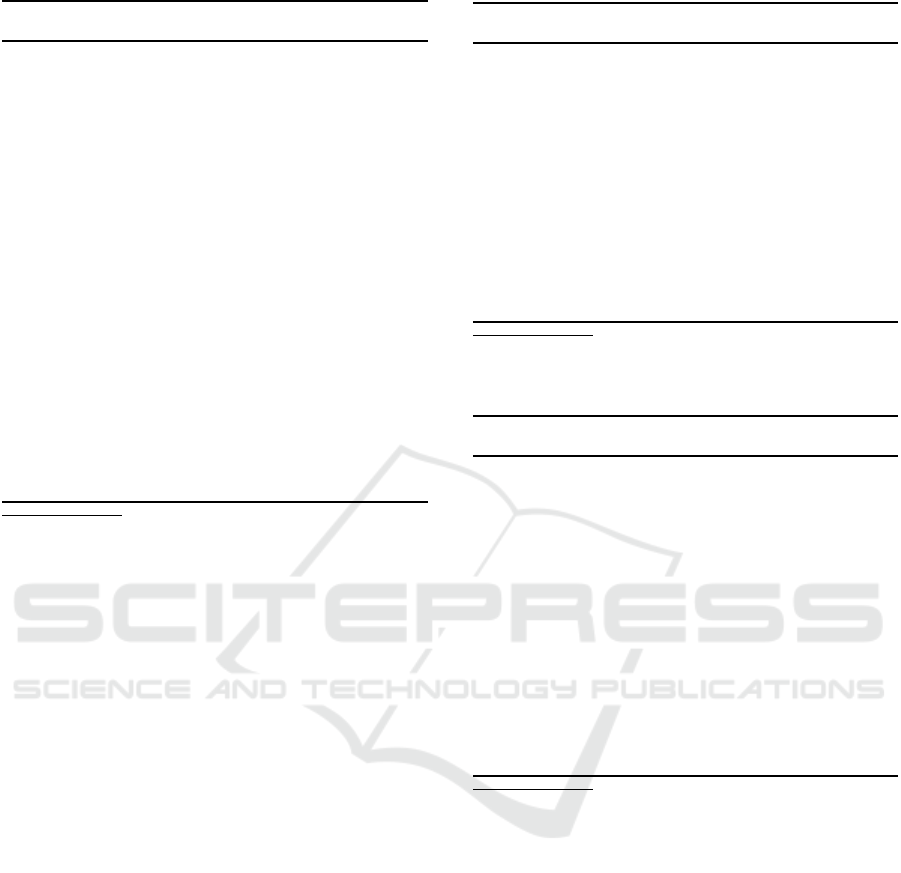
Table 2: Software entities: roles and rights belonging to
IEC-62351-8.
Entity Primary Rol Sec. Rol Access to Action Priority
E1 SECADM −
CPS
1,2,3
Control
priorControl
≥ 0.10
E2 SECAUD −
CPS
1,2
Read
priorRead
≥ 0.60
E3 Operator −
CPS
1,2,3
Control
priorControl
≥ 0.10
E4 Engineer Operator
CPS
1,3
Report
priorReport
≥ 0.30
E5 Installer
Engineer
CPS
1,2
Config
priorConfig
& ≥ 0.10
Operator
E? − − CPS
1,2,3
− −
In order to characterize the IEC-62351-8 standard,
we randomly assigned profiles to the control devices
(e.g., sensor, actuator, and RTU) and followed the six
control entities (software agents) defined in (Alcaraz
et al., 2016). These six agents are summarized in Ta-
ble 2, and their behaviors plotted in Table 3. The idea
was that each agent had to constantly request access
according to the profile predefined in Table 2 and ex-
ecutes their desired actions in the destination node.
However, this access may be granted depending on
a set of parameters, such as the context, the type of
role of the subject, and the kind of action in the des-
tination. All these parameters were managed by the
PDPs, equipped with a rule-based expert system writ-
ten in JESS (Java
T M
Expert System Shell). Each rule
defined the rights specified by the standard together
with those attributes that explained the conditions of
the context (e.g., degree of accessibility), the control
subjects’ characteristics (i.e., roles (Operator, Engi-
SECRYPT 2016 - International Conference on Security and Cryptography
24
neer, Viewer, Installer, SECADM, etc.) and permis-
sions (read, write, control, etc.)), as well as the type
of control object (e.g., sensor, actuator, RTU, etc.).
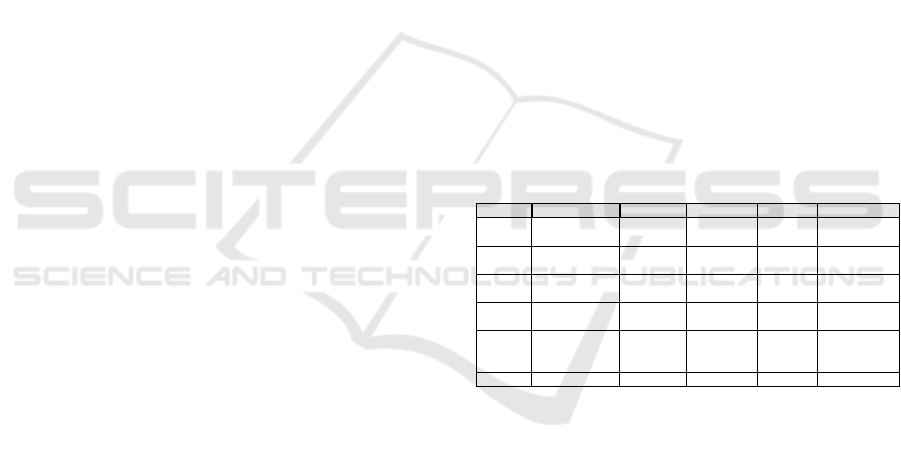
Table 3: Behaviors of the six software agents.
Control entities attempting to access restricted networks
Access E1 E2 E3 E4 E5 E?
Network 1 - PLOD α=0.1 - 1000 Nodes
SM
a
Total 15 20 21 19 12 19
Normal 80.0 45.0 42.85 5.26 41.66 0.0
Denied 20.0 55.0 57.14 94.73 58.33 100.0
DSD 0.0 0.0 0.0 100.0 0.0 0.0
Network 2 - BA α=3 - 500 Nodes
Total 22 14 14 19 22 19
Normal 63.63 28.57 64.28 0.0 77.27 0.0
Denied 36.36 71.42 35.71 100.0 22.72 100.0
DSD 0.0 0.0 0.0 0.0 11.76 0.0
Network 3 - PLOD α=0.2 - 100 Nodes
Total 16 19 19 22 21 21
Normal 93.75 0.0 100.0 54.54 0.0 0.0
Denied 6.25 100.0 0.0 45.45 100.0 100.0
DSD 0.0 0.0 0.0 0.0 0.0 0.0
Access E1 E2 E3 E4 E5 E?
Network 1 - PLOD α=0.1 - 2000 Nodes
ML
b
Total 8 15 10 8 7 10
Normal 100.0 73.33 100.0 0.0 42.85 0.0
Denied 0.0 26.66 0.0 100.0 57.14 100.0
DSD 0.0 0.0 0.0 0.0 0.0 0.0
Network 2 - BA α=3 - 1500 Nodes
Total 9 6 10 7 6 9
Normal 55.55 33.33 50.0 0.0 50.0 0.0
Denied 44.44 66.66 50.0 100.0 50.0 100.0
DSD 0.0 0.0 0.0 0.0 33.33 0.0
Network 3 - PLOD α= 0.2 - 1000 Nodes
Total 9 7 6 11 13 7
Normal 88.88 0.0 83.33 54.54 0.0 0.0
Denied 11.11 100.0 16.66 45.45 100.0 100.0
DSD 0.0 0.0 0.0 0.0 0.0 0.0
a
Small-Medium Network (first experiment).
b
Medium-Large Network (second experiment).
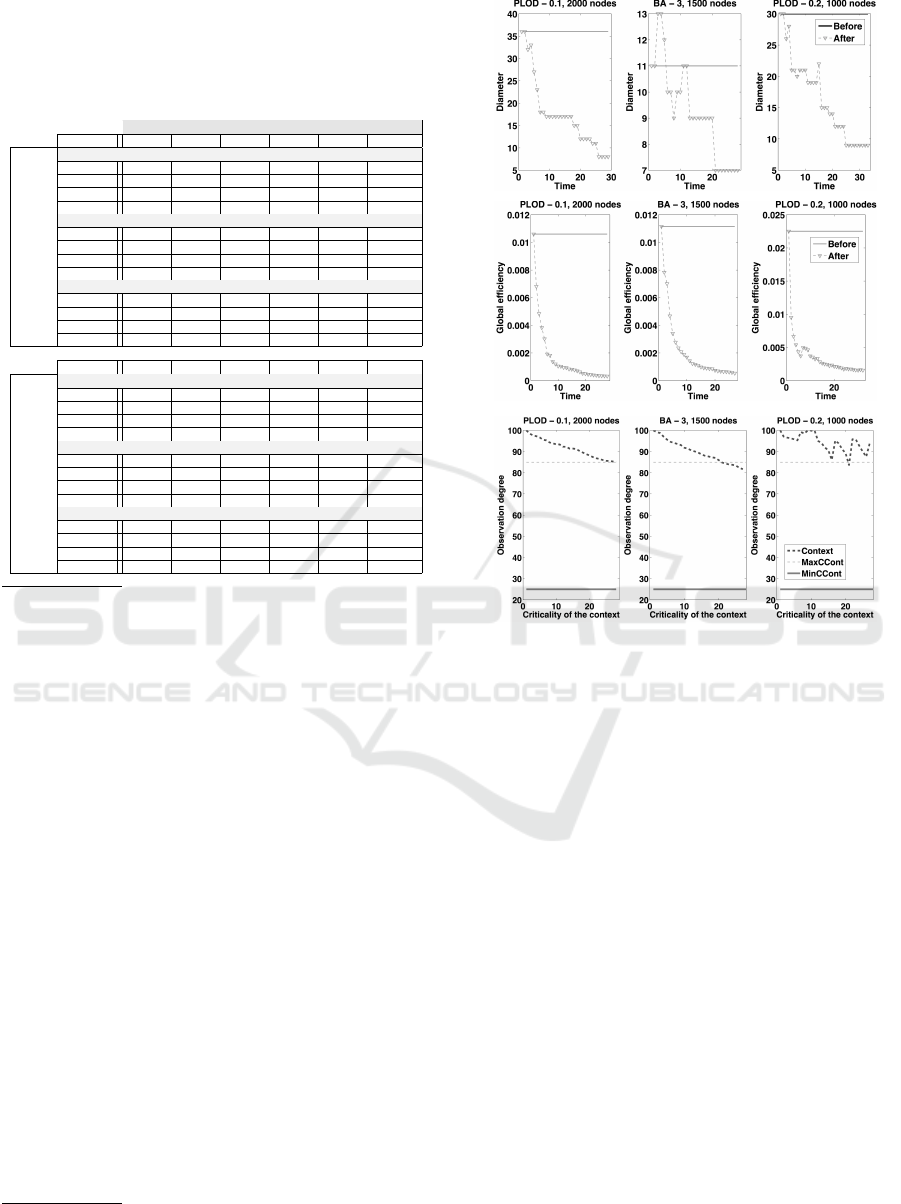
Observing Figures 2 and 3, it is possible to note
that the different distributions, some of them per-
turbed with insertions (see Figure 2 and Figure 3 -
A, B (diameter and global efficiency
1
)), are able to
maintain their observation levels at all times. This
is because the context values (see Figure 2 and Fig-
ure 3 - C (observation degree)) remain at higher val-
ues than MaxCCont, the point at which the PDPs
has to start to filter the access. Moreover, observ-
ing the figures, we noted that large networks tend to
be more resilient than small networks (the findings
echoed those reported in (Nie et al., 2014; Alcaraz
et al., 2013)), which is due to their implicit connec-
tions. For this reason, it is recommended that the con-
figuration of restoration mechanisms should depend
on the dimension of a network and the frequency of
the repairs, which should be explicitly defined by the
maintenance and security policies of each organiza-
tion involved. For example, it is good practice to spec-
ify a restoration requirement in relation to the type or
frequency of an alert received from alarm managers
(integrated inside PDPs or gateways), or schedule a
routine maintenance.
1
The global efficiency is the inverse of the average short-
est path, and is inversely related to the path length.
Figure 2: Threats and repair of medium and large networks:
(A, B) Diameter and gobal efficiency before and after per-
turbation; and (C) observation degree after restoration using
STG-2.
However, according to Table 3, DSD is only ac-
tivated for agents E4 and E5 to attend to small-
medium networks with identifiers CPS
1
(through E4
with 100% total access in Operator mode) and CPS
2
(through E5 with 11.76% access); and medium-
large networks with identifier CPS
2
(through E5 with
33.33% of the accepted access total). In contrast, the
access is completely refused for E? and in all cases,
since this entity is unknown to the system. The rest
of the entities have access to the system depending
on the criticality degree of the context, denying all
those accesses that may collapse the communications.
These findings underline the suitability of our ap-
proach to be deployed for critical applications, where
the use of policy enforcement systems built on es-
tablished and recommended standards together with
mechanisms for resilience, help satisfy four of the
five control requirements, namely operational perfor-
mance, survivability, sustainability and safety.
Dynamic Restoration in Interconnected RBAC-based Cyber-physical Control Systems
25
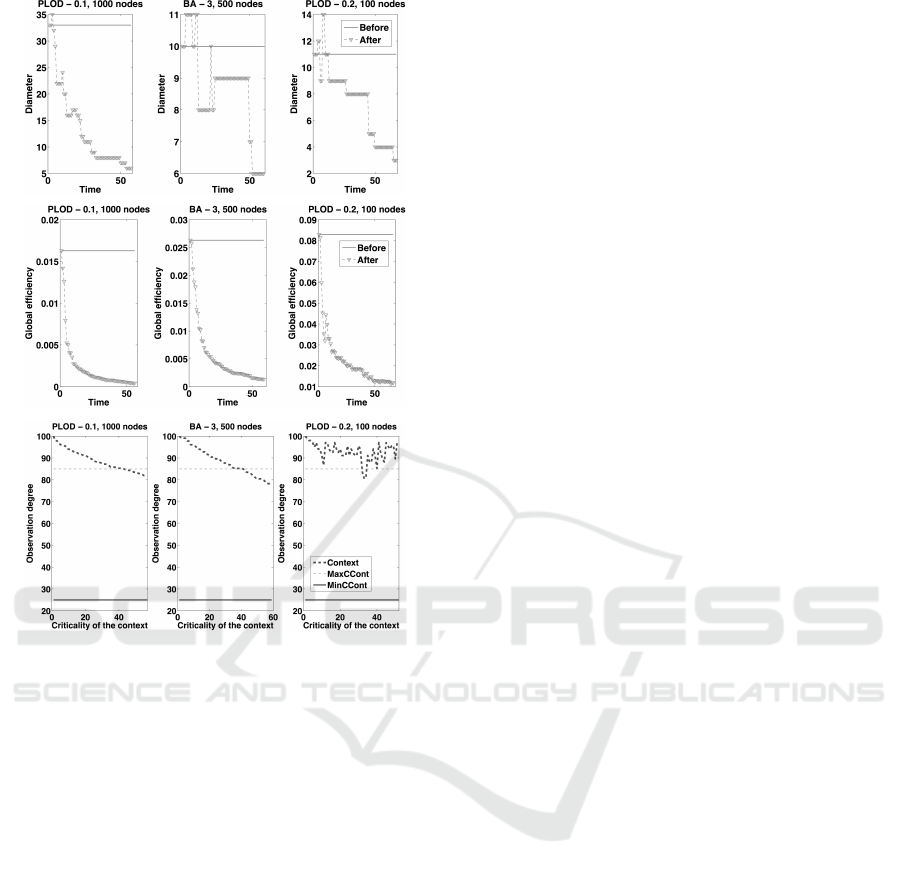
Figure 3: Threats and repair of small and medium networks:
(A, B) Diameter and gobal efficiency before and after per-
turbation; and (C) observation degree after restoration using
STG-2.
4 CONCLUSION
Our increasing reliance on information and commu-
nications technologies (ICT) affords exploitative op-
portunities for malicious actors targeting our critical
infrastructure. Building a resilient critical infrastruc-
ture is an important and ongoing area of national and
cyber security concern, and certainly a topic of cur-
rent interest. In this paper, we sought to address the
challenge of providing automated recovery mecha-
nisms and ensuring interoperability in a cost-effective
manner. More specifically, we extended our previ-
ous work (Alcaraz et al., 2016) in order to incorpo-
rate capacities of restoration and considering the con-
cept of structural controllability, the theory of supern-
ode and the IEC-62351-8 standard. To achieve this,
we presented an algorithm capable of adapting the
existing restoration proposals and restructuring the
network in order to respect the concept of supern-
ode. We then presented a theoretical and a practical
case study to demonstrate the feasibility of the algo-
rithm in a real-world context. For example, the re-
sults showed that the adaptation of restoration mea-
sures can help interconnected systems maintain their
accessibility levels at all times. This also means that
self-healing topics could become a primordial aspect
in critical infrastructure protection, where it is nec-
essary to provide preventive lightweight approaches
that allow overheads to be reduced. This will allow us
to achieve linear time averages, and lightweight secu-
rity approaches to protect the communication chan-
nels (Yang et al., 2016).
Future work will include incorporating this work
in a real-world system (to low scale), with the aims of
further refinement.
ACKNOWLEDGEMENTS
The first author receives funding from the Ram
´
on y
Cajal research programme financed by the Ministerio
de Econom
´
ıa y Competitividad. In addition, this work
also has been partially supported by the same Ministe-
rio through the research project PERSIST (TIN2013-
41739-R), by the Andalusian government through the
project FISSICO (P11-TIC-07223) and by the Euro-
pean Commission through the H2020 project NECS
(H2020-MSCA-ITN-2015- 675320).
REFERENCES
Albert, R. and Barab
´
asi, A. (2002). Statistical mechanics
of complex networks. Reviews of Modern Physics,
74(1):4797.
Alcaraz, C., Lopez, J., and Wolthusen, S. (2016). Policy
enforcement system for secure interoperable control
in distributed smart grid systems. Journal of Network
and Computer Applications, 59:301 – 314.
Alcaraz, C., Miciolino, E. E., and Wolthusen, S.
(2013). Structural controllability of networks for non-
interactive adversarial vertex removal. In 8th In-
ternational Conference on Critical Information In-
frastructures Security, volume 8328, pages 120–132.
Springer.
Alcaraz, C. and Wolthusen, S. (2014). Recovery of struc-
tural controllability for control systems. In Eighth
IFIP WG 11.10 International Conference on Critical
Infrastructure, volume 441, pages 47–63. Springer.
Haynes, T., Hedetniemi, S. M., Hedetniemi, S. T., and Hen-
ning, M. A. (2002). Domination in graphs applied to
electric power networks. SIAM Journal on Discrete
Mathematics, 15(4):519–529.
Healy, P. and Nikolov, N. S. (2013). Hierarchical draw-
ing algorithms, chapter Chapter 13, pages 409–446.
SECRYPT 2016 - International Conference on Security and Cryptography
26

Handbook of Graph Drawing and Visualization, CRC
Press.
IEC-61850 (2003). Power utility automation - communica-
tion networks and systems in substations - parts 1-10.
TC 57 - Power systems management and associated
information exchange.
IEC-62351 (2007-2011). IEC-62351 parts 1-8: Infor-
mation security for power system control opera-
tions, international electrotechnical commission.
http://www.iec.ch/smartgrid/standards/, retrieved
September 2015.
IEC-62351-8 (2011). Power systems management and
associated information exchange - data and com-
munications security - part 8: Role-based access
control, international electrotechnical commission,
2011. http://www.iec.ch/smartgrid/standards/, re-
trieved Sept. 2015.
Kneis, J., M
¨
olle, D., R., S., and Rossmanith, P. (2006). Pa-
rameterized power domination complexity. Informa-
tion Processing Letters, 98(4):145–149.
Lin, C.-T. (1974). Structural Controllability. IEEE Trans-
actions on Automatic Control, 19(3):201–208.
Marchese, M. and Mongelli, M. (2012). Simple pro-
tocol enhancements of rapid spanning tree protocol
over ring topologies. Computer Network, 56(4):1131–
1151.
M
´
edard, M., Finn, S. G., and Barry, R. A. (1999). Redun-
dant trees for preplanned recovery in arbitrary vertex-
redundant or edge-redundant graphs. IEEE/ACM
Trans. Netw., 7(5):641–652.
Nakayama, K., Shinomiya, N., and Watanabe, H. (2012).
An autonomous distributed control method for link
failure based on tie-set graph theory. Circuits and
Systems I: Regular Papers, IEEE Transactions on,
59(11):2727–2737.
Nie, S., Wang, X., Zhang, H., Li, Q., and Wang, B. (2014).
Robustness of controllability for networks based on
edge-attack. PLoS ONE, 9(2):1–8.
Pagani, G. A. and Aiello, M. (2013). The power grid as
a complex network: A survey. Physica A: Statistical
Mechanics and its Applications, 392(11):2688–2700.
Palmer, C. and Steffan, J. (2000). Generating net-
work topologies that obey power laws. In Global
Telecommunications Conference (GLOBECOM ’00),
volume 1, pages 434–438.
Quattrociocchi, W., Caldarelli, G., and Scala, A. (2014).
Self-healing networks: Redundancy and structure.
PLoS ONE, 9(2):e87986.
Samuel, H., Zhuang, W., , and Preiss, B. (2011). Improv-
ing the dominating-set routing over delay-tolerant mo-
bile ad-hoc networks via estimating node intermeeting
times. In EURASIP Journal on Wireless Communica-
tions and Networking, Hindawi Publishing Corpora-
tion, pages 1–12.
Smith, M. (2010). Definition of the inetOrg-
Person LDAP object class, RFC-2798,.
http://www.ietf.org/rfc/rfc2798.txt, retrieved Septem-
ber 2015.
Studio, A. D. (2006-2013). http://directory.apache.org/ stu-
dio/, retrieved September 2015.
Yang, Y., Lu, J., Choo, K.-K. R., and Liu, J. K. (2016).
Lightweight Cryptography for Security and Privacy:
4th International Workshop, LightSec 2015, Bochum,
Germany, September 10-11, 2015, Revised Selected
Papers, chapter On Lightweight Security Enforce-
ment in Cyber-Physical Systems, pages 97–112.
Springer International Publishing, Cham.
Dynamic Restoration in Interconnected RBAC-based Cyber-physical Control Systems
27
