
Sensor-based Wearable PUF
Kazuhide Fukushima, Seira Hidano and Shinsaku Kiyomoto
KDDI R&D Laboratories, Inc., 2-1-15 Ohara, Fujimino-shi, Saitama, 356-8502, Japan
Keywords:
Wearable, IoT, Smartphone, Sensor, Accelerometer, Gyroscope, PUF.
Abstract:
The Physically Unclonable Function (PUF) is a technique that generates unique device identifiers based on
variations in the manufacturing process. The Internet of Things (IoT) has become widespread, and various
kinds of devices are now available. Device authentication and key management are essential to provide a
secure service to these devices. We can use the unforgeable identifier generated by the PUF as a key for
encryption and authentication. However, the existing PUFs require a dedicated hardware or low-level software,
i.e., driver. Thus, they are impractical to use on smartphones or IoT devices due to the severe limitations
of production cost and power consumption. In this paper, we propose a sensor-based PUF that utilizes the
accelerometer and gyroscope, which are widely available on smartphones and IoT devices. We implement
the proposed PUF on a smartwatch and show that accelerometer-based PUF achieves good usability, extreme
robustness, and a high entropy of 91.66 bits.
1 INTRODUCTION
Android is an open mobile platform developed by
the Open Handset Alliance (OHA) led by Google,
Inc (Open Handest Alliance, 2010). It had grown
to be the top-share smartphone platform in the
world (82.8% market share) in the second quarter
of 2015 (IDC, 2015), and more than 1,800,000 ap-
plications are available from the Android Market as
of November 2015 (Statista, 2015). Google have
announced the release of the Brillo, which is an
Android-based platform for the Internet of Things
(IoT) (Google, 2015). Users can add new features to
their smartphones and IoT devices by installing appli-
cations. However, an attacker may analyze applica-
tions to find a secret key to decrypt protected content
or get authentication information illegally.
One approach is to generate the unique key dy-
namically based on the device information of smart-
phone or IoT device. For example, the MAC ad-
dress of a Wi-Fi adapter and Bluetooth adapter has
been used as the input to a key generation func-
tion. However, the MAC address can be eas-
ily modified in a device where the administrator
privilege is compromised. Furthermore, the cur-
rent version of Android and iOS prohibit general
applications from getting the MAC address. An-
droid 6.0 (API level 23) returns a fixed value
02:00:00:00:00:00 for WifiInfo.getMacAddress()
and BluetoothAdapter.getAddress() that is a method
to get the MAC address of the Wi-Fi and Bluetooth
adapter respectively (Google, 2015). iOS7 returns the
same value for similar APIs (Apple, 2013). The pro-
tection of the key generation algorithm is another crit-
ical issue. The Android SDK contains an obfuscation
tool: ProGuard (Lafortune, 2002) to protect against
unauthorized analysis and modification. Nonetheless,
this mechanism offers only limited protection since it
relies solely on a software mechanism.
Another approach is hardware-based protection,
and one idea is to use tamper-proof hardware. Mo-
bile phones have a tamper-proof device, such as a user
identity module (UIM) (3GPP2, 2000) or subscriber
identity module (SIM) (The 3rd Generation Partner-
ship Project (3GPP), 1990) that provides secure stor-
age for service-subscriber keys and secure computa-
tional capability. The serial number of the SIM card
can be used as a valid identifier. Android provides
the getSimSerialNumber() method to get the identi-
fier. The Trusted Computing Group (TCG) has estab-
lished technology specifications for the Trusted Plat-
form Module (TPM) that is available in smartphones
and PCs (Trust Computing Group, 2016). The TPM
provides the cryptographic functions to enhance the
security of the platform, and it is used as a root of
trust. However, most IoT devices, including wear-
ables, do not have dedicated hardware.
The Physically Unclonable Function (PUF),
which generates unique device identifiers based on
variation in the manufacturing process, is a promis-
Fukushima, K., Hidano, S. and Kiyomoto, S.
Sensor-based Wearable PUF.
DOI: 10.5220/0005946702070214
In Proceedings of the 13th International Joint Conference on e-Business and Telecommunications (ICETE 2016) - Volume 4: SECRYPT, pages 207-214
ISBN: 978-989-758-196-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
207

ing alternative. We can use the device identifier as
a key. The device identifier generated by the PUF
is hard to analyze since it does not appear in digital
format on the device. However, the existing PUFs
depend on additional and dedicated hardware; thus,
they are impractical to use in IoT devices due to
the severe limitations of production cost and power
consumption. The Static Random-Access Memory
(SRAM) PUF and Dynamic Random-Access Mem-
ory (DRAM) PUF utilize existing hardware, but they
are still infeasible since they require low-level soft-
ware, i.e., a driver.
Smartphones and IoT devices have various sen-
sors and hardware such as an accelerometer, gyro-
scope, proximity sensor, microphone, speaker, and
camera. Most wearables have an accelerometer and
gyroscope to change the behavior based on user ac-
tions. In this paper, we propose a sensor-based PUF
that utilizes the characteristic values of accelerometer
and gyroscope. The proposed PUF is widely available
on smartphones and IoT devices.
2 RELATED WORK
The Physically Unclonable Function (PUF) (Pappu
et al., 2002) is a technique that generates unique de-
vice identifiers based on variations in the manufactur-
ing process. The Arbiter PUF utilizes the difference
in the signal transmission delay (Gassend et al., 2004;
Lee et al., 2004), and the Glitch PUF is based on the
signal transition (Suzuki and Shimizu, 2010). Kumar
et al. proposed the Butterfly PUF, which uses the ini-
tial state of flip-flops (Kumar et al., 2008). Gassend
et al. proposed the Ring Oscillator PUF based on the
difference in the oscillating frequency of the ring os-
cillator (Gassend et al., 2002). Finally, Tuyls et al.
proposed the Coating PUF based on the capacitance
of the coating materials containing dielectric parti-
cles (Tuyls et al., 2006). These PUFs depend on addi-
tional and dedicated hardware; thus, they are imprac-
tical to use in smartphones or IoT devices.
Some PUFs based on the existing hardware have
been proposed. An SRAM PUF utilizes the initial
data in memory when the power is turned on (Chopra
and Colopy, 2009; Maes et al., 2009a; Maes et al.,
2009b). Krishna et al. proposed a memory-cell-based
PUF that uses intrinsic process variations in the read
and write reliability of cells in static memory (Krishna
et al., 2011). Liu et al. proposed a DRAM PUF that
uses the decay time and output stability (Liu et al.,
2014). Keller et al. proposed a PUF based on the
influence of temperature and time on the charge de-
cay (Keller et al., 2014). A DRAM PUF proposed
by Tehranipoor (Tehranipoor et al., 2015) uses initial
data similar to an SRAM PUF. However, the SRAM
and DRAM PUFs are still impractical in smartphones
or IoT devices. They require dedicated drivers to ex-
tract the characteristic features of devices, which im-
poses an additional cost.
Thus, we propose a sensor-based PUF for smart-
phones and IoT devices. The proposed PUF can ex-
tract the characteristic values of sensors through the
standard API of the OS. Thus, it does not require the
additional hardware and dedicated drivers.
3 PROPOSED METHOD
We propose a sensor-based PUF for smartphones and
IoT devices including wearables. The proposed PUF
acquires the maximum and minimum values of the ac-
celerometer and gyroscope as the characteristic values
of the sensors and generates device identifiers based
on these characteristic values. We describe the fea-
tures of the accelerometer and gyroscope in Section
3.1 and 3.2, respectively. Section 3.3 describes the
method to generate a device identifier based on char-
acteristic values of the sensors.
3.1 Accerelometer
A 3-axis accelerometer measures the accelerations
along the x, y, and z-axis. Figure 1 shows the direc-
tion of these axes. Most smartphones and wearables
have an accelerometer that can measure up to ±2 G
(19.6 m/s
2
) or ±4 G (39.2 m/s
2
).
The maximum and minimum values of the ac-
celerometer along each axis differ from one device
to another. Thus, these values can be used to gen-
erate device identification data. We construct a 6-
dimensional data set that consists of the maximum
and minimum values along the x, y, and z-axis and
extract digits that have enough variety. The charac-
teristic value of the accelerometer can be achieved by
concatenating these digits.
3.2 Gyroscope
A 3-axis gyroscope measures the angular velocities
around the x, y, and z-axis. Figure 2 shows the ro-
tation direction around these axes. Many wearables
have a gyroscope that can measure up to 2000 deg/s
(34.9 rad/s).
The maximum and minimum values of the gyro-
scope around each axis differ from one device to an-
other. Thus, these values can be used to generate de-
vice identification data. We construct a 6-dimensional
SECRYPT 2016 - International Conference on Security and Cryptography
208
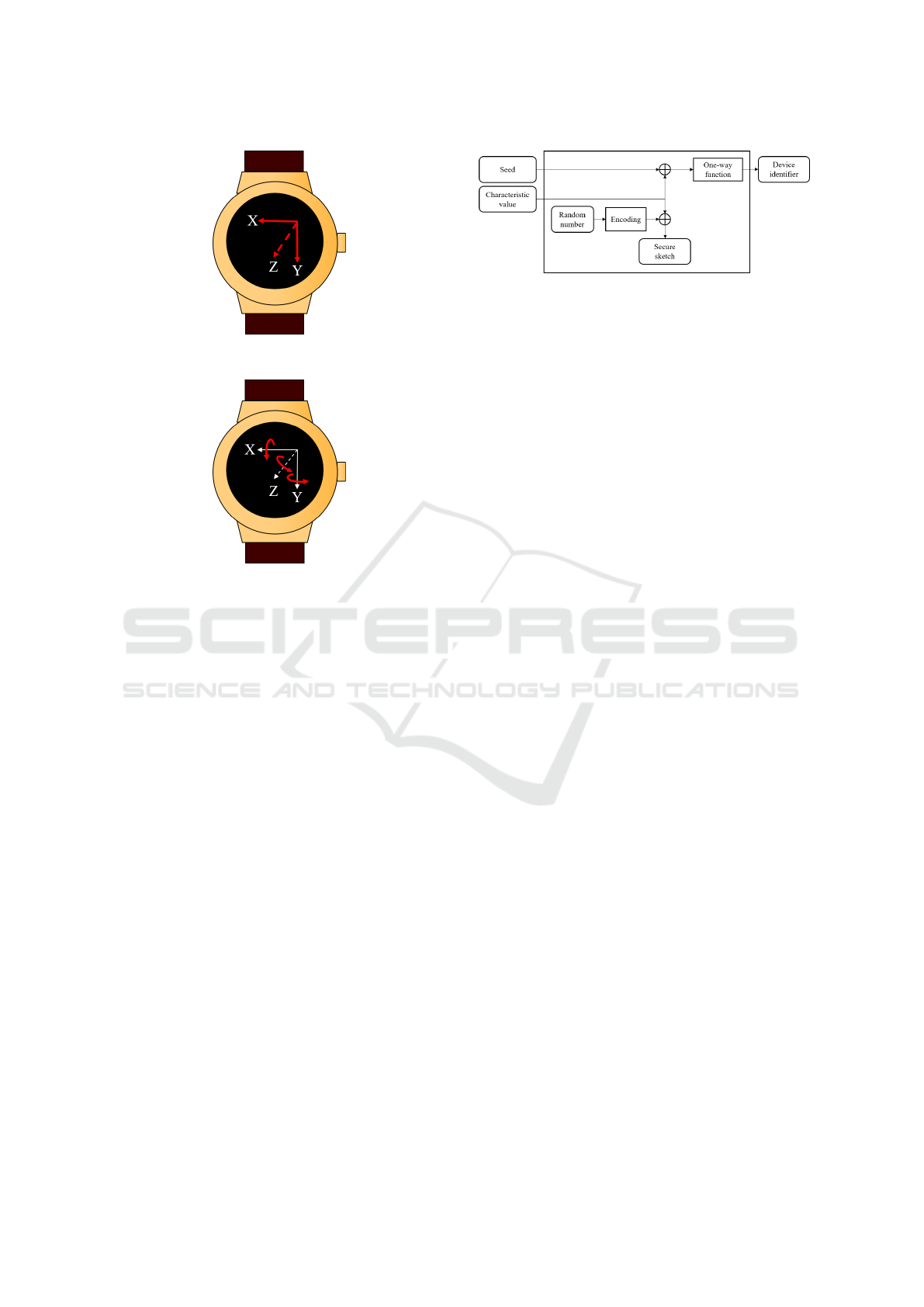
Figure 1: Axis direction of accelerometer.
Figure 2: Rotation direction of gyroscope.
data set that consists of the maximum and minimum
values around the x, y, and z-axis and extract digits
that have enough variety. The characteristic value of
the gyroscope can be achieved by concatenating these
digits.
3.3 Device Identifier Generation
We now describe the detailed behavior of the sensor-
based PUF to generate the device identifier. The iden-
tifier generation process consists of the acquisition of
the characteristic values of the sensors (step 1) and
identifier generation using a one-way function (step
2).
Step 1 Acquisition of the Characteristic Values of
the Sensors. The sensor-based PUF requires the
maximum values and minimum values of the ac-
celerometer and gyroscope. A user needs to shake
and twist the hand holding or wearing a device. This
process stores the tentative maximum and minimum
values of sensors. These tentative values are updated
when the current sensor value is larger or smaller than
the tentative maximum or minimum value, respec-
tively. We consider the tentative values as the actual
maximum and minimum values after a user shakes the
device for a specified time (a few seconds), and the
tentative values are stable. We show a sample imple-
Figure 3: Fuzzy extractor in registration phase.
mentation of this step in the appendix.
Step 2 Generation of Device Identifier. The
sensor-based PUF uses a one-way function to gener-
ate a device identifier from the concatenated charac-
teristic values of the accelerometer and gyroscope. A
device identifier has to vary with each application or
service when the identifier is used as a key. In this
case, applications or services can concatenate a seed
to the input to the one-way function to fulfill the re-
quirement.
We can use a fuzzy extractor (Dodis et al., 2008)
to deal with minor deviations of the characteristic val-
ues of the sensors. The fuzzy extractor generates and
registers a secure sketch SS for future identifier ex-
tractions in the registration phase. It generates the
random number r, encoded with an error-correcting
code C. The secure sketch SS is the exclusive-or
of the characteristic value of sensor w, and C(r) or
SS = w ⊕C(r). The random number r is disposed of
when the registration process completes. In the de-
vice identifier generation phase, the fuzzy extractor
recovers the original characteristic value w from the
secure sketch SS calculated from the current charac-
teristic value w
0
in the device. It calculates C(r) as
C(r) = EC(SS ⊕ w
0
) = EC[C(r) ⊕ (w ⊕ w
0
)],
where EC is the error-correcting component and w ⊕
w
0
denotes the minor deviation of the characteristic
values of the sensor. Finally, the fuzzy extractor gen-
erates the device identifier as
DeviceID(w
0
,s) = h(w ⊕ s) = h(SS ⊕C(r) ⊕ s)
using the one-way function h. Figure 3 shows the
fuzzy extractor in the registration phase and Figure 4
shows the device identifier generation phase.
The sensor values for each axis can be considered
as independent. Thus, the sensor-based PUF sepa-
rately applies the fuzzy extractor to each character-
istic value (maximum and minimum values for x, y,
and z-axis).
The proposed PUF encodes the characteristic val-
ues of the sensor to binary data with Gray code. The
Hamming distance between adjacent values is one en-
coding; thus, minor deviations up to ±t can be re-
covered with the error correcting code of t correction
Sensor-based Wearable PUF
209
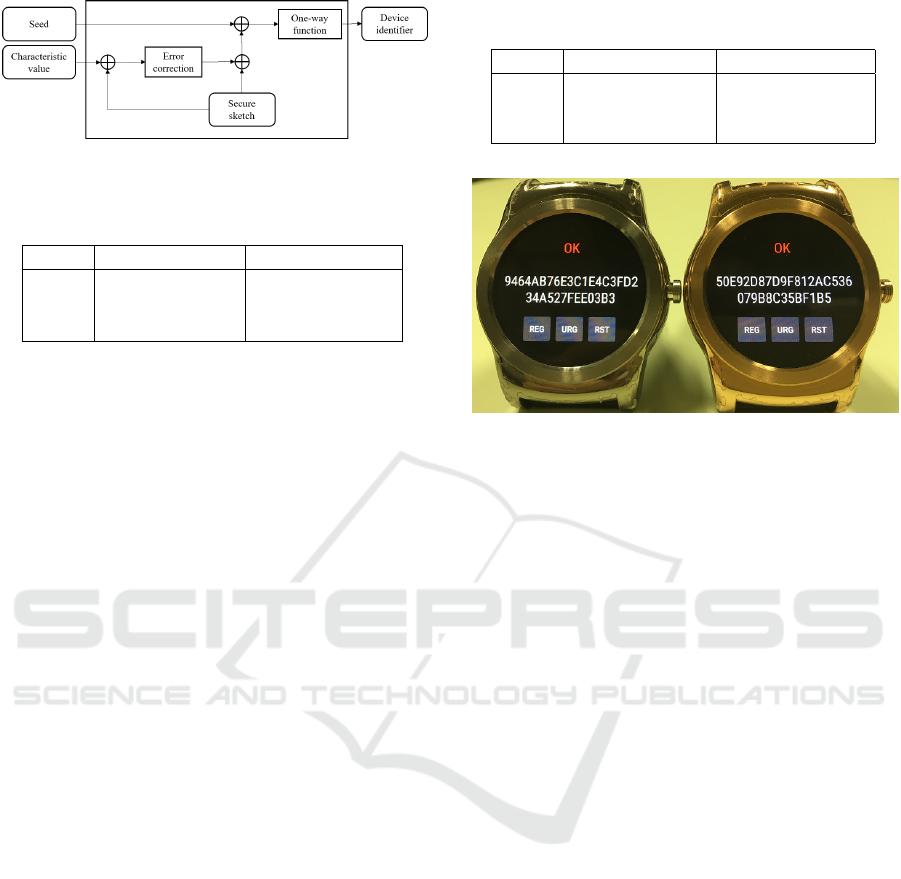
Figure 4: Fuzzy extractor in device identifier generation
phase.
Table 1: Maximum and minimum values of acceleration.
Maximum Minimum
x-axis 19.460205 m/s
2
-19.539200 m/s
2
y-axis 19.228836 m/s
2
-19.770569 m/s
2
z-axis 19.755707 m/s
2
-19.243698 m/s
2
capability. However, the robustness achieved by the
fuzzy extractor has a trade-off with entropy. We dis-
cuss the trade-off in section 5.2.
4 IMPLEMENTATION
We have implemented the sensor-based PUF as an
Android Wear application. The PUF application is
executed on an LG Watch Urbane smartwatch to eval-
uate the entropy and robustness.
The LG Watch Urbane has an accelerometer that
can measure from -2 G (-19.6 m/s
2
) to 2 G (-19.6
m/s
2
). The maximum and minimum values of the sen-
sor vary with the devices and axis. Table 1 shows an
example. The number in the second decimal place
and the following digits have enough variety. Thus,
the PUF application extracts the numbers in the sec-
ond to sixth decimal place as a character string with
five figures from each of the maximum and minimum
values of the accelerations along the x, y, and z-axis.
The application can acquire the characteristic value
of the accelerometer with 30 characters by concate-
nating these six character strings.
The LG Watch Urbane has a gyroscope that can
measure from -2,000 degree/s (-34.9 rad/s) to 2,000
degree/s (34.9 rad/s). Table 2 shows an example. The
number in the fourth decimal place and the following
digits have enough variety. Thus, the PUF applica-
tion extracts the numbers in the fourth to sixth deci-
mal place as a character string with three figures from
each of the maximum and minimum values of angular
velocities around the x, y, and z-axis. The application
can acquire a characteristic value of the accelerometer
with 18 characters by concatenating these six charac-
ter strings.
The PUF application generates a device identifier
with 128-bit length from the characteristic value of
Table 2: Maximum and minimum values of angular veloc-
ity.
Maximum Minimum
x-axis 34.997101 rad/s -35.000763 rad/s
y-axis 34.997055 rad/s -35.000809 rad/s
z-axis 34.997803 rad/s -35.000061 rad/s
Figure 5: Screenshot of sensor-based PUF application.
an accelerator or gyroscope by using SHA-256 and
truncating the last 128 bits. We do not use the fuzzy
extractor in the application since it extracts the iden-
tical characteristic values from the accelerometer and
gyroscope consistently.
Figure 5 shows a photo of the PUF application on
the LG Watch Urbane. The application regenerates
and displays the generated device identifier whenever
the tentative maximum and minimum values of sen-
sors are updated. The tentative maximum and mini-
mum values are reset to zero when the user presses the
reset button (RST). The application stores the device
identifier when the register button (REG) is pressed,
and deletes the identifier when the unregister button
(URG) is pressed. We can use this function to eval-
uate the robustness of the device identifier. The ap-
plication compares the generated identifier and stored
identifier and displays ”OK” if they are identical or
”NG” otherwise.
We have compared the usability of the
accelerometer-based PUF and gyroscope-based
PUF in an LG Watch Urbane. The accelerometer-
based PUF can generate the same identifier within
a few seconds. The measurement range of the ac-
celerometer is from -2 G to 2 G, and the sensor value
quickly reaches the maximum or minimum when a
user shakes the device. However, the identifier gener-
ated by the gyroscope-based PUF is not stable. The
measurement range of the gyroscope is from -2,000
degrees/s to 2,000 degrees/s. A user has to rotate the
device around three axes at a rate of six revolutions
per second, which is difficult if the user continues to
wear the device. As a result, the accelerometer-based
PUF is more useful than the gyroscope-based PUF in
SECRYPT 2016 - International Conference on Security and Cryptography
210

an LG Watch Urbane. Thus, we evaluate the entropy
and robustness of the accelerometer-based PUF in the
following section.
5 EVALUATION
We evaluate the compatibility of the sensor-based
PUF with the requirements for PUFs. Then, we evalu-
ate the robustness and entropy of the device identifier
generated by the accelerometer-based PUF.
5.1 Compatibility with Requirements
Maes and Verbauwhede showed the requirements
for PUFs: evaluable, unique, reproducible, un-
predictable, one-way, unclonable and tamper evi-
dent (Maes and Verbauwhede, 2010). We show the
compatibility of the sensor-based PUF with these re-
quirements.
Evaluable. The sensor-based PUF uses the charac-
teristic values of the existing sensors, and these val-
ues can be acquired through the existing APIs. The
PUF can be implemented as a general application at
minimal cost. Furthermore, the sensor-based PUF
uses only the extraction and concatenation of charac-
ter strings, one-way function, and optional exclusive-
or and operations for the error-correcting code. Thus,
the PUF is feasible in resource-restricted devices.
Unique. The device identifier generated by the
sensor-based PUF is unique since it has high entropy.
We evaluate the entropy of the proposed PUF in sec-
tion 5.2.
Reproducible. The device identifier generated by
the sensor-based PUF is reproducible since it has high
robustness. We evaluate the robustness of the pro-
posed PUF in section 5.3.
Unpredictable. The sensor-based PUF is not appli-
cable to the challenge-response model. Thus, we can-
not evaluate the unpredictability of the proposed PUF.
One-way. The sensor-based PUF uses a one-way
function to generate the device identifier from the
characteristic values. The one-way function guaran-
tees this requirement for the sensor-based PUF.
Unclonable and Tamper Evident. The sensor-
based PUF acquires the characteristic values of sen-
sors using software (application) and generates the
device identifier. Thus, we have to protect against
acquisition and modification of the characteristic val-
ues and generated device identification. For exam-
ple, attackers can make a clone of the sensor-based
PUF by acquiring the characteristic values of the sen-
sor. They can also modify the values of the sensors or
the generated device identifier in the memory. Thus,
we have to protect against these attacks by applying
memory protection techniques(Ostrovsky, 1990; Gol-
dreich and Ostrovsky, 1996; Nakano et al., 2012).
Attackers may modify the identifier generation algo-
rithm so that it outputs an arbitrary identifier. We have
to protect these attacks by applying software tamper-
proof techniques to prevent modification of the appli-
cation. We will study the security against physical
attacks in our future research.
5.2 Entropy
We have evaluated the Quadratic Renyi entropy of the
device identifier generated by an accelerometer-based
PUF. The Quadratic Renyi entropy is defined as:
H
2
(B) = −log
2
∑
b∈B
p
B
(b)
2
.
H
2
(B) is a particular case (α = 2) of the Renyi entropy
H
α
(B), which is defined as:
H
α
(B) =
1
1 − α
log
2
∑
b∈B
p
B
(b)
α
.
The Shannon entropy is defined as
H(B) = −
∑
b∈B
p
B
(b)log
2
p
B
(b).
The Renyi entropy and Shannon entropy have the re-
lationship: lim
α→1
H
α
(B) = H(B). The Reyni en-
tropy is decreasing with respect to α. Thus, the
Quadratic Renyi entropy is smaller than or equal to
the Shannon entropy, or H
2
(B) ≤ H(B). The same
holds when the B is according to the uniform distri-
bution.
The
∑
b∈B
p
B
(b)
2
is the probability that the two
sampled values are identical, and the Quadratic Renyi
entropy is referred to as the collision entropy. The
Quadratic Renyi entropy can be written as
H
2
(B) = −log
2
p
D
(0)
with the probabilistic mass function of the distance D
between two sampled values p
D
(d).
The Quadratic Renyi entropy has been used to
evaluate the entropy of biometric information (Hi-
dano et al., 2010; Hidano et al., 2012). However, it is
Sensor-based Wearable PUF
211

difficult to predict the probability p
D
(d) directly with
a limited number of samples. Thus, we used a non-
parametric approach with a specific kernel function
that can estimate p
D
(d) with a small error. Koko-
nendji (Kokonendji et al., 2007) proposed a non-
parametric estimation of probability mass functions
using discrete triangular distribution. The probability
mass function can be estimated as
ˆp
D
(x) =
1
n
n
∑
i=1
T
a,h,x
(X
i
),
where X
1
, X
2
, . . . , X
n
are random samples from a
count distribution with an unknown probability mass
function. T
a,h,x
(X) is the probability mass function of
the discrete triangular distribution of the order h and
with the arm a. T
a,h,x
(X) is given as:
T
a,h,x
(X) =
(
(a+1)
h
−|X−x|
h
P(a,h)
(X −a ≤ x ≤ X + a)
0 (otherwise)
where P(a, h) = (2a + 1)(a + 1)
h
− 2
∑
a
k=0
k
h
is the
normalizing constant. p
D
(0) can be estimated as
ˆp
D
(0) =
1
n
a
∑
i=0
n
i
[(a + 1)
h
− i
h
]
P(a,h)
,
where n
i
is the number of samples whose distance is
i. The asymptotic mean integrated squared errors are
given by:
AMISE(a,h) =
(a + 1)
h
nP(a,h)
+
1
4
[V (a,h)]
2
∑
x∈N
[p
00
(x)]
2
,
where V (a,h) is the variance of T
a,h,x
(X) as
V (a,h) =
1
P(a,h)
"
a(2a + 1)(a + 1)
h
3
− 2
a
∑
k=0
k
h+2
#
and p
00
(x) is the second derivative of p(x) as
p
00
(x) =
p(2) − 2p(1) + p(0) (x = 0)
p(3)−p(2)−p(1)+p(0)
2
(x = 1)
p(x+2)−2p(x)+p(x−2)
4
(otherwise)
.
AMISE(a,h) is increasing with respect to a; thus,
a
∗
= 1 is the optimal parameter for a. The optimal
parameter h
∗
for h is given by:
h
∗
= argmin
h>0
AMISE(1,h).
We acquired 90 strings, which are the characteris-
tic values of accelerometers described in section 3.1,
from 15 of the same wearables (LG Watch Urbanes).
Each string ranges from 00000 to 99999 and can be
encoded with a 17-bit binary value. We exhaustively
compared the binary values and studied the distribu-
tion of the Hamming distance.
Table 3: Distribution of Hamming distance.
Distance Frequency
0 0
1 2
2 5
3 24
4 92
5 193
6 394
7 646
8 711
9 729
10 572
11 354
12 187
13 70
14 22
15 3
16 1
17 0
Total 4,005
Table 3 shows the distribution of the Hamming
distance, and it is similar to the binomial distribution.
Thus, we used p(x) as the probabilistic mass function
of the binomial distribution B(17, 1/2) to find the op-
timal parameter h
∗
. AMISE(1,h) is increasing with
respect to h; however, ˆp
D
(0) goes to 0 as h → 0. Thus,
a
∗
= 1 and h
∗
= 1/12 are used as the optimal param-
eters. The estimated Quadratic Renyi entropy of the
artificially generated histogram of the binomial distri-
bution B(17, 1/2) is 16.19 bits using the optimal pa-
rameter setting.
We can estimate ˆp
D
(0) = 2.52 × 10
−5
, from
the distribution of the Hamming distance in Ta-
ble 3. Thus, the Quadratic Renyi entropy is
ˆ
H
2
(B) =
log
2
ˆp
D
(0) or 15.28 bits. The device identifier based
on the accelerometer consists of six-dimensional data,
and the total entropy is 91.66 bits.
We discuss the trade-off between entropy and ro-
bustness in the case where the sensor-based PUF uses
the fuzzy extractor. The entropy loss of each char-
acteristic value of the sensors is at least log
2
∑
t
k=0
n
k
bits according to the Hamming bound. n is the bit
length of the encoded characteristic value, and t is
the correction capability of the error-correcting code.
The total entropy loss is at least 6log
2
∑
t
k=0
n
k
bits.
Table 4 shows the relationship between the correc-
tion capability of the error-correcting code and the up-
per bound of the total entropy of the device identifier
generated by the sensor-based PUF. The device iden-
tifier generated by the accelerometer-based PUF can
achieve more than 60 bits of entropy when the fuzzy
extractor is not used, or when the fuzzy extractor uses
the error-correcting code with one-bit correction ca-
pability.
SECRYPT 2016 - International Conference on Security and Cryptography
212

Table 4: Entropy loss due to error correction.
Capability Entropy
0 91.66
1 66.64
2 48.06
3 33.43
4 21.75
5 12.47
5.3 Robustness
The sensor-based PUF using an accelerometer and
gyroscope can generate the identical device identifier
within the same device without the fuzzy extractor.
We confirmed that the device identifier generated by
the accelerometer-based PUF is consistent by the fact
that the same user generates the same identifier more
than 1,000 times. Furthermore, more than ten users
can generate the same identification within the same
device. The accelerometer-based PUF generates the
same device identifier regardless of the surrounding
temperature. Finally, it generates the same identifier
in -5 degrees Celsius and 90 degrees Celsius and at
2000 meters of altitude on a mountain.
6 CONCLUSION
In this paper, we proposed a sensor-based PUF. The
sensor-based PUF utilizes the accelerometer and gy-
roscope that are widely available in smartphone and
IoT devices. We implemented the proposed PUF on a
smartwatch and showed that the accelerometer-based
PUF achieves good usability, extreme robustness, and
a high entropy of 91.66 bits.
REFERENCES
3GPP2 (2000). Removable user identity module (R-
UIM) for cdma2000 spread spectrum systems.
http://www.3gpp2.org/public html/specs/CS0023-
0.pdf.
Apple (2013). What’s New in iOS 7.0 – Apple Developer.
https://developer.apple.com/library/ios/releasenotes/
General/WhatsNewIniOS/Articles/iOS7.html.
Chopra, J. and Colopy, R. (2009). SRAM Character-
istics as Physical Unclonable Functions. Worces-
ter Polytechnic Institute Electric Project Collec-
tion, http://www.wpi.edu/Pubs/E-project/Available/E-
project-031709-141338/.
Dodis, Y., Ostrovsky, R., Reyzin, L., and Smith, A. (2008).
Fuzzy Extractors: How to Generate Strong Keys from
Biometrics and Other Noisy Data. SIAM Journal on
Computing, 38(1):97–139.
Gassend, B., Clarke, D., Lim, D., van Dijk, M., and De-
vada, S. (2004). Identification and Authentication of
Integrated Circuits. Concurrency and Computation:
Practice and Experience,, 16(11):1077–1098.
Gassend, B., Clarke, D., van Dijk, M., and Devadas, S.
(2002). Silicon physical random functions. In Pro-
ceedings of the 9th ACM Conference on Computer and
Communications Security, CCS2002, page 148.
Goldreich, O. and Ostrovsky, R. (1996). Software protec-
tion and simulation on oblivious RAMs. Journal of
the ACM, 43(3):431–473.
Google (2015). Android 6.0 changes,
access to hardware identifier.
http://developer.android.com/intl/ja/about/versions/
marshmallow/android-6.0-changes.html#behavior-
hardware-id.
Google (2015). Brillo. https://developers.google.com/
brillo/.
Hidano, S., Ohki, T., Komatsu, N., and Takahashi, K.
(2010). A metric of identification performance of bio-
metrics based on information content. In Proceedings
of 11th International Conference on Control, Automa-
tion, Robotics and Vision, ICARCV2010, pages 1274–
1279.
Hidano, S., Ohki, T., and Takahashi, K. (2012). Evaluation
of security for biometric guessing attacks in biomet-
ric cryptosystem using fuzzy commitment scheme. In
Proceedings of 2012 International Conference of the
Biometrics Special Interest Group, BIOSIG, pages 1–
6.
IDC (2015). Smartphone OS Market Share, 2015
Q2. http://www.idc.com/prodserv/smartphone-os-
market-share.jsp.
Keller, C., Gurkaynak, F., Kaeslin, H., and Felber, N.
(2014). Dynamic memory-based physically unclon-
able function for the generation of unique identifiers
and true random numbers. In Proceedings of IEEE In-
ternational Symposium on Circuits and Systems, vol-
ume 3, pages 2740–2743.
Kokonendji, C. C., Kiesse, T. S., and Zocchi, S. S. (2007).
Discrete triangular distributions and nonparametric
estimation for probability mass function. Journal of
Nonparametric Statistics, 19:241–254.
Krishna, A. R., Narasimhan, S., Wang, X., and Bhunia,
S. (2011). MECCA: A robust low-overhead PUF
using embedded memory array. In Proceedings of
the Cryptographic Hardware and Embedded Systems,
CHES2011, pages 407–420.
Kumar, S. S., Guajardo, J., Maes, R., Schrijen, G. J., and
Tuyls, P. (2008). The Butterfly PUF protecting IP on
every FPGA. In Proceedings of 2008 IEEE Interna-
tional Workshop on Hardware-Oriented Security and
Trust, HOST2008, pages 67–70.
Lafortune, E. (2002). ProGuard.
http://proguard.sourceforge.net/.
Lee, J., Lim, D. L. D., Gassend, B., Suh, G., Dijk, M. V.,
and Devadas, S. (2004). A technique to build a secret
key in integrated circuits for identification and authen-
tication applications. In Proceedings of 2004 Sympo-
sium on VLSI Circuits., pages 176–179.
Sensor-based Wearable PUF
213

Liu, W., Zhang, Z., Li, M., and Liu, Z. (2014). A trustwor-
thy key generation prototype based on DDR3 PUF for
wireless sensor networks. In Proceedings of 2014 In-
ternational Symposium on Computer, Consumer and
Control, IS3C 2014, pages 706–709.
Maes, R., Tuyls, P., and Verbauwhede, I. (2009a). A soft
decision helper data algorithm for SRAM PUFs. In
Proceedings of IEEE International Symposium on In-
formation Theory, ISIT2009, pages 2101–2105.
Maes, R., Tuyls, P., and Verbauwhede, I. (2009b). Low-
Overhead Implementation of a Soft Decision Helper
Data Algorithm for SRAM PUFs. In Proceedings of
the Cryptographic Hardware and Embedded Systems,
CHES2009, pages 332–347.
Maes, R. and Verbauwhede, I. (2010). Physically Un-
clonable Functions: A Study on the State of the Art
and Future Research Directions. Towards Hardware-
Intrinsic Security, pages 3–37.
Nakano, Y., Cid, C., Kiyomoto, S., and Miyake, Y.
(2012). Memory access pattern protection for
resource-constrained devices. In Proceedings of
Smart Card Research and Advanced Application Con-
ference, CARDIS2012, pages 188–202.
Open Handest Alliance (2010). Open Handest Alliance.
http://www.openhandsetalliance.com/index.html.
Ostrovsky, R. (1990). Efficient computation on oblibious
RAMs. In Proceedings of the 22nd Annual ACM Sym-
posium on Theory of Computing, STOC1990, pages
514–523.
Pappu, R., Recht, B., Taylor, J., and Gershenfeld, N. (2002).
Physical One-Way Functions. Science, 297:2026–
2030.
Statista (2015). Number of available applications in the
Google Play Store from December 2009 to November
2015. http://www.statista.com/statistics/266210/.
Suzuki, D. and Shimizu, K. (2010). The Glitch PUF
: A New Delay-PUF. In Proceedings of the
Cryptographic Hardware and Embedded Systems,
CHES2010, pages 366–382.
Tehranipoor, F., Karimina, N., Xiao, K., and Chandy, J.
(2015). DRAM based Intrinsic Physical Unclonable
Functions for System Level Security. In Proceed-
ings of the 25th edition on Great Lakes Symposium
on VLSI, GLSVLSI ’15, pages 15–20.
The 3rd Generation Partnership Project (3GPP) (1990).
Specification of the subscriber identity mod-
ule - mobile equipment (sim-me) interface.
http://www.3gpp.org/ftp/Specs/html-info/1111.htm.
Trust Computing Group (2016). Trusted Platform Module.
http://www.trustedcomputinggroup.org/developers/
trusted platform module.
Tuyls, P., Schrijen, G.-J.,
ˇ
Skori
´
c, B., van Geloven, J., Ver-
haegh, N., and Wolters, R. (2006). Read-Proof Hard-
ware from Protective Coatings. In Proceedings of
the Cryptographic Hardware and Embedded Systems,
CHES2006, pages 369–383.
@Override
public void onSensorChanged
(SensorEvent event) {
if (event.sensor.getType() ==
Sensor.TYPE_ACCELEROMETER) {
boolean upd = false;
float x = event.values[0];
float y = event.values[1];
float z = event.values[2];
if (x > maxX) { maxX = x; upd = true; }
if (x < minX) { minX = x; upd = true; }
if (y > maxY) { maxY = y; upd = true; }
if (y < minY) { minY = y; upd = true; }
if (z > maxZ) { maxZ = z; upd = true; }
if (z < minZ) { minZ = z; upd = true; }
if (upd) {
// Generate device identifier based
// on updated tentative values
deviceId = generateDeviceId();
}
}
}
Figure 6: Acquisition of maximum and minimum values of
the accelerometer.
APPENDIX
Figure 6 shows a sample implementation to acquire
the maximum and minimum values of the accelerom-
eter in an Android device. The fields maxX, minX,
maxY, minY, maxZ, and minZ are fields that store the
tentative maximum and minimum values of acceler-
ations along the x, y and z-axis. The method on-
SensorChanged is called when the sensor values have
changed. We retrieve the event from the accelerome-
ter by using the if statement. The acceleration along
the x, y, and z-axis is stored in the values array. The
same code where Sensor.TYPE ACCELEROMETER is
replaced with Sensor.TYPE GYROSCOPE can acquire
the maximum and minimum values of angular veloc-
ities around each axis.
The sensor-based PUF needs to set the highest
sampling frequency on the sensors so that we can ef-
ficiently acquire the maximum and minimum values.
We can set the sampling frequency through the reg-
isterListener method in Android. The method regis-
ters SensorEventListener that is used to receive no-
tifications from the SensorManager when the sen-
sor values have changed. The notification frequency
is highest, and the period is a few milliseconds if
SENSOR DELAY FASTEST is passed to the method.
SECRYPT 2016 - International Conference on Security and Cryptography
214
