
Multiple Classifier Learning of New Facial Extraction Approach
for Facial Expression Recognition using Depth Sensor
Nattawat Chanthaphan
1
, Keiichi Uchimura
1
, Takami Satonaka
2
and Tsuyoshi Makioka
2
1
Graduate School of Science and Technology, Kumamoto University, Kumamoto, Japan
2
Electronic Systems Tech., Information Systems Tech., Kumamoto Prefectural College of Technology, Kumamoto, Japan
Keywords: Emotion Recognition, Feature Extraction, Structured Streaming Skeleton, Depth Sensor.
Abstract: In this paper, we are justifying the next step experiment of our novel feature extraction approach for facial
expressions recognition. In our previous work, we proposed extracting the facial features from 3D facial
wire-frame generated by depth camera (Kinect V.2). We introduced the facial movement streams, which
were derived from the distance measurement between each pair of the nodes located on human facial wire-
frame flowing through each frame of the movement. The experiment was conducted by using two
classifiers, K-Nearest Neighbors (K-NN) and Support Vector Machine (SVM), with fixed values of k
parameter and kernel. 15-people data set collected by our software was used for the evaluation of the
system. The experiment resulted promising accuracy and performance of our approach in the last
experiment. Consequently, we were anticipating to know the best parameters that would reflect the best
performance of our approach. This time experiment, we try tuning the parameter values of K-NN as well as
kernel of SVM. We measure both accuracy and execution time. On the one hand, K-NN overcomes all other
classifiers by getting 90.33% of accuracy, but on the other hand, SVM consumes much time and gets just
67% of accuracy.
1 INTRODUCTION
Due to the growing of the technology industry, the
researchers and the inventors are trying to develop
the system that could think in the same way or has
the intelligence as human being. The intelligent
systems that could deal with human properly have
been being developed for several decades and there
were numerous valuable applications or systems
were exposed to this world so far. One of the most
important fields is computer vision which tries to
make computer to be able to comprehend the
visualization of human.
In this paper, we will concentrate on one of the
most popular computer vision techniques called
human facial emotion recognition. In our previous
works (Chanthaphan et al., 2015-2016), we
introduced a novel approach for extracting facial
features from the moving facial skeleton for facial
emotions recognition by using depth camera instead
of using color/grayscale camera (2D) or 3D
structure. In the experiment, we have used the data
set that was collected by our designed software since
there was no open data set (the moving sequences of
coordinates on facial wireframe) for our approach
distributed on any distributor websites. The result
from the experiment showed a promising
consequence, nevertheless, there were several
parameters to be concerned, for instance, number of
clusters of template dictionary, k parameter of K-
NN, kernel function of SVM, structure of facial
skeleton and etc.
Since there are many researches that are related
to this field, we would like to sample some of well-
known algorithms as follows. 2D based approaches
consist of Active Shape Models (ASM) (Cootes et
al., 1992), Active Appearance Models (AAM)
(Cootes et al, 1998), Constrained Local Models
(CLM) (Cristinacce, 2006) and etc. For 3D image,
3D Morphable Models (3DMM) (Blanz, 1999) is the
famous one. Additionally, there was a new approach
of Baltrusaitis et al. (2012) that introduced the use of
depth camera combining with CLM. All those
mentioned approaches indeed worked very well and
they are also renowned. However, they still have
some variations and conditions to be concerned such
as head pose, head orientation, distance from
camera, light condition, skin tone and so forth.
Chanthaphan, N., Uchimura, K., Satonaka, T. and Makioka, T.
Multiple Classifier Learning of New Facial Extraction Approach for Facial Expressions Recognition using Depth Sensor.
DOI: 10.5220/0005948000190027
In Proceedings of the 13th International Joint Conference on e-Business and Telecommunications (ICETE 2016) - Volume 5: SIGMAP, pages 19-27
ISBN: 978-989-758-196-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
19
(a) (b)
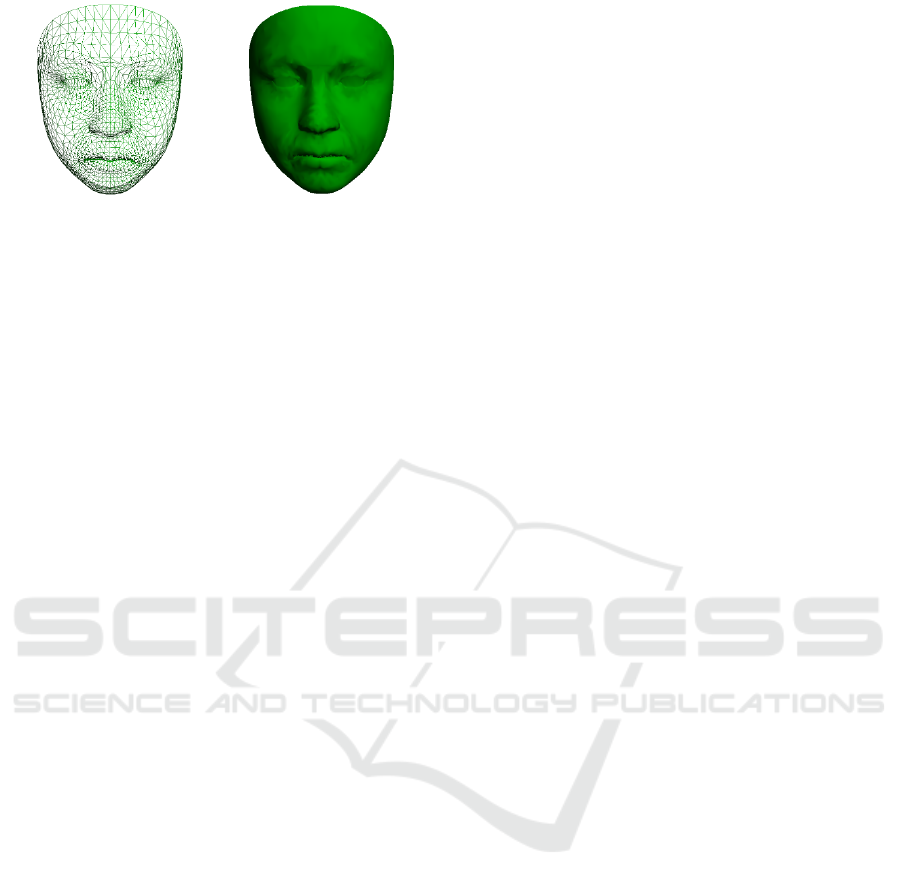
Figure 1: Facial skeleton generated by Kinect HD face
API. This skeleton consists of 1347 vertices: (a) Wire-
frame mode, (b) Solid mode.
In contrast, our based approaches could reduce
those mentioned constraints by employing the
approach of human gesture recognition of Zhao et al.
(2014) which indicated about how to address the
intra-class variations. Intra-class variations consist
of four variations as follows.
Viewpoint variation: This variation describes
about the relation between human body and
viewpoint of the camera.
Anthropometry variation: This variation is
related to the difference between human body
sizes which do not affect the human movement.
Execution rate variation: This variation indicates
the problem with different frame rate of the
camera or the moving speed of human.
Personal style variation: This variation is about
the difference of human performing their action
differently.
The new sensory device, namely Kinect V2 has
been used in order to generate the motion stream of
human face. Figure 1 illustrates the facial skeleton
(wire-frame) generated by using Kinect HD face
API. In this paper, we have used the same method as
in the previous works, but this time, we concentrated
on parameter tuning of classifiers, for example, k
parameter of K-Nearest Neighbors (K-NN) as well
as the kernel function of Support Vector Machine
(SVM). At the end, the most suitable parameter and
kernel that suit our feature extraction approach will
be summarized.
2 RELATED WORKS
As we have mentioned about various variations in
the introduction, image pre-processing is conducted
prior to the feature extraction phase. One of pre-
processing technique is head pose estimation. In the
book of Baggio et al. (2012), it stated a well-known
method to do 3D head pose estimation by using
AAM and POSIT (Pose from Orthography and
Scaling with Iterations) (Dementhon et al., 1995).
The principal component analysis (PCA) was also
used to reduce the number of parameters of model
and the Delaunay Triangulation (DT) (Lawson,
1972) was used to create the statistical texture of the
AAM. In the paper of Zhu et al. (2012), it indicated
that RGB camera-based approach had very
expensive computation time. Anyhow, new sensory
device was released in 2010 named Microsoft
Kinect, the abilities of this device were described in
this article of Zhang (2012) and we could reduce our
effort on pre-processing using Microsoft Kinect.
Piana et al. (2014) also made use of Kinect to
recognize human emotion. They proposed using 3D
human body skeleton generated by Kinect to
distinguish human emotions, whereas the overall
accuracy was just 61.3%. The result of this research
showed that human body gestures were not a good
description for emotions.
Mao et al. (2015) described that because human
faces were 3D object, 2D images which were
captured by RGB camera were insufficient to
represent the geometrical feature. Therefore, they
decided to use two sorts of feature generated by
Kinect. The first one was Animation Units (AUs)
which was the value that could be obtained by using
Kinect face tracking software development kit
(SDK). There were six AUs provided by this SDK
(brow raiser, brow lower, lip raiser, lip stretcher, lip
corner depressor and jaw lower) which had value
between -1 and 1. The other one, they called Feature
point positions (FPPs) which were 45 coordinates of
45 points obtained by Kinect face tracking SDK as
well. The result of classification was computed by
fusing result of 30 consequent frames, both from
AUs and FPPs. So, this was pre-segmentation based
approach which could not handle execution rate
variation. For the evaluation, they have collected
their own database named UJS Kinect emotion
database (USJ-KED) from ten actors with variations
in five poses (-30∘, -15∘, 0∘, 15∘ and 30∘) and seven
emotions (anger, disgust, fear, happiness, neutral,
sadness and surprise). Multi-pose was requiring in
their database because their approach was still not
able to deal with viewpoint variation and
anthropometry variation. As they were using Kinect
as the sensor, we have compared our approach with
them. However, it was just a rough comparison due
to several different factors, like database and number
of emotional classes they used.
SIGMAP 2016 - International Conference on Signal Processing and Multimedia Applications
20
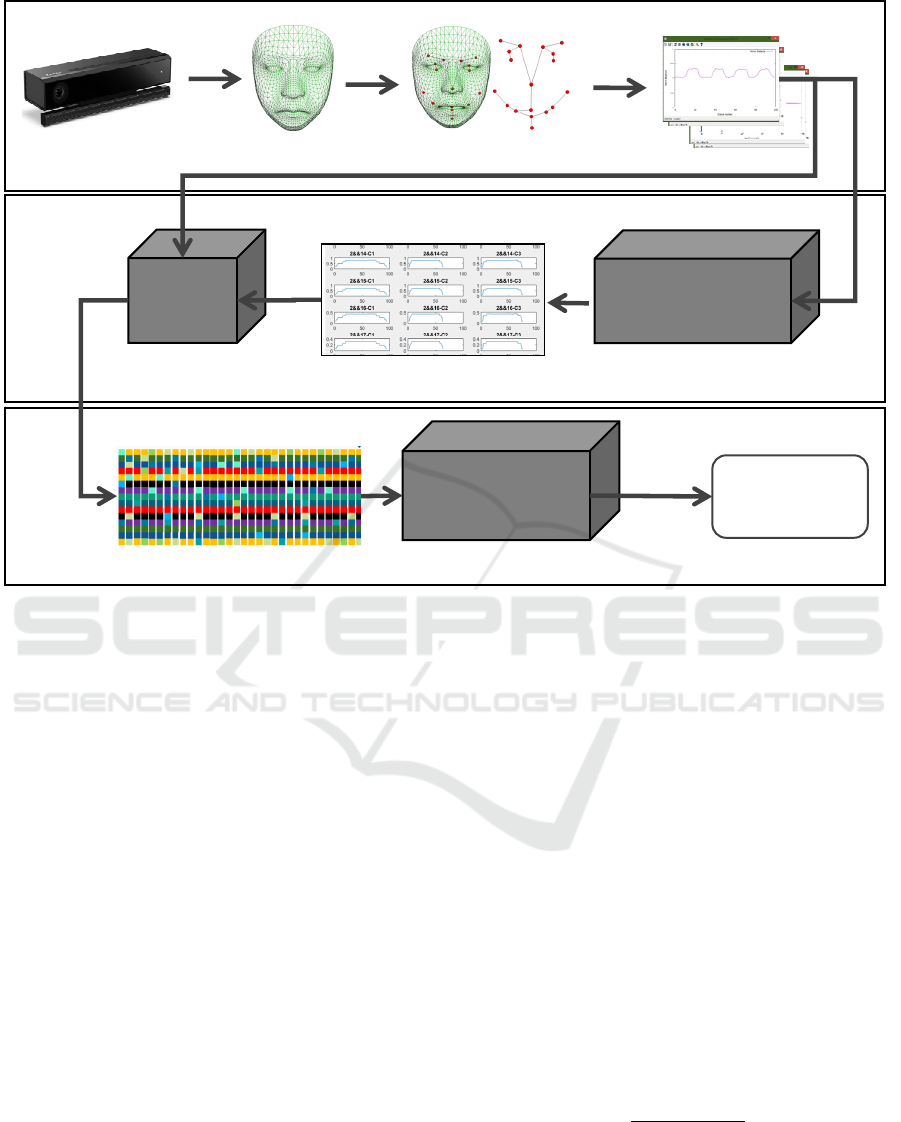
Figure 2: The Overall of frame work of the proposed approach.
In the work of Zhao et al. (2014), they also
introduced a novel approach called Structured
Streaming Skeleton (SSS). This approach succeeded
on handling all those variations. So, we have
decided to adapt SSS feature extraction approach to
our approach in order to distinguish human facial
emotion rather than human body gesture.
The other related works besides SSS feature
extraction were Facial Action Coding System
(FACS) of Ekman et al. (1976) the points of the
interesting for feature extraction process. Dynamic
Time Warping (DTW) distance as well-known
technique to find minimal alignment between two
sequences from work of Sakoe et al. (1978) was
used to find value representing each attribute of the
feature vector and finally work of Sakurai et al.
(2007) to find optimal end frame of scanning.
3 PROPOSED APPROACH
Our approach is based on SSS feature extraction as
described in the related work. Therefore, the
framework of our system could be shown as in
Figure 2.
3.1 Data Stream Generation
By the help of Kinect working together with HD
face Application Programming Interface (API), we
can get the facial wire-frame which responds to the
facial movement instantly. The wire-frame consists
of 1347 vertices. To select the proper vertices that
we are going to use for generating the stream, we
must refer to the paper of Ekman et al. (1976) that
describes about FACS then we can summarize the
points that represent each emotion as in Table 1.
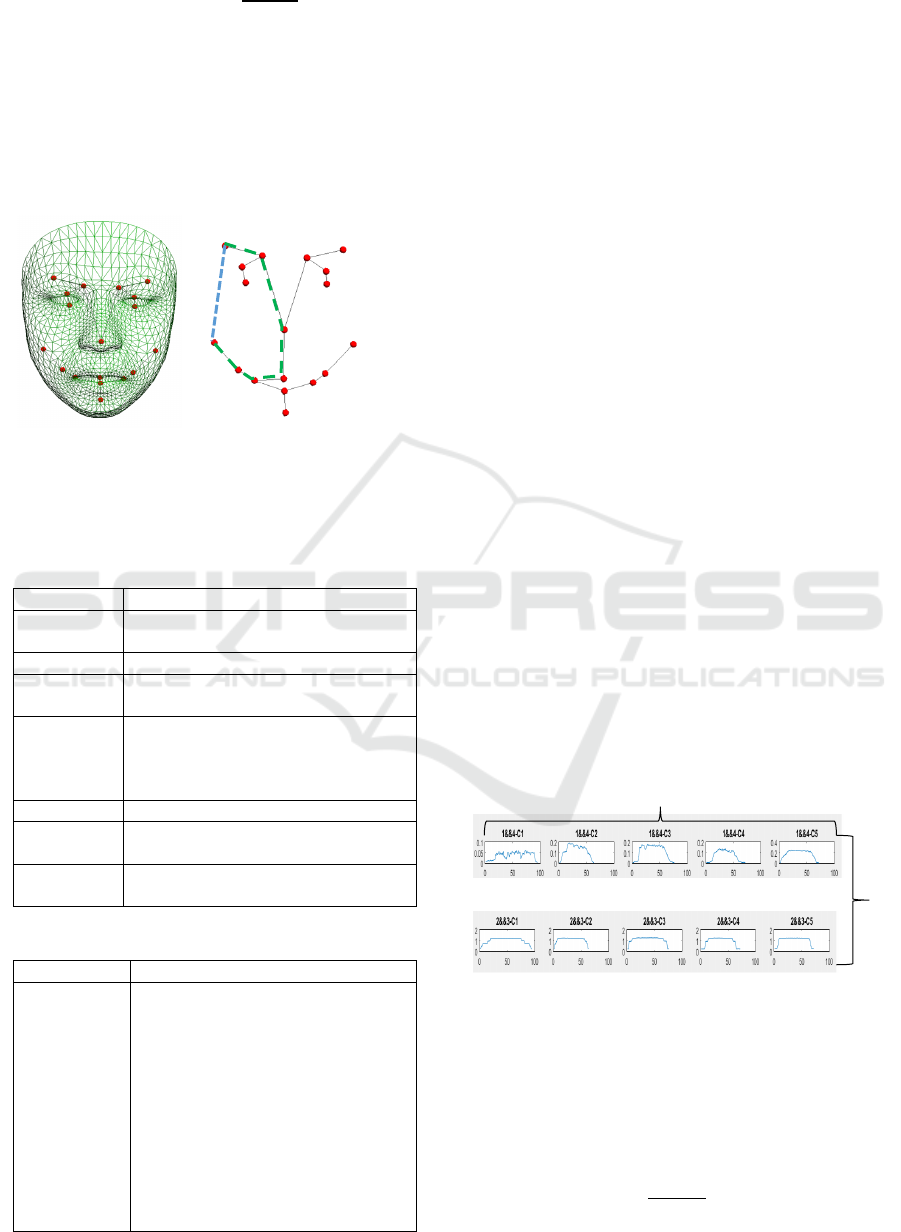
Then, we will get the points that could represent all
those emotions as shown in Figure 3. Next step, we
will generate the motion streams by calculating the
distance between each pairwise joint and
normalizing them by the path between each joint.
Equations 1 and 2 are used for the calculation.
nC2 combination equation 3 is used to calculate the
number of pairs (rows of streams).
S
ij
t
=
E (p
i
t
,p
j
t
)
Path
ij
(t)
(1)
Path
ij
(t)= E p
L
m
(t),p
L
m+1
(t)
#Node_ij-1
m=1
(2)
Kinect V2
HD face API
Facial Wire-frame
FACS
Facial skeleton
Motion data stream
Stream generator
SSS feature
extraction
Template dictionary
Feature extraction
Classification
Feature vector
Classification
model
DTW
Distance
Template Dictionary
generator
Classification
Data stream generation
Multiple Classifier Learning of New Facial Extraction Approach for Facial Expressions Recognition using Depth Sensor
21
Rows_of_Streams=
N
(
N
-1)
2
(3)
Where, the definition of each symbol in
equations 1, 2 and 3 is justified in Table 2.
In this case, we have 18 feature points (N = 18).
Therefore, the number of rows will be 153.
Finally, we will have the normalized distances of
all 153 rows for all frames and the motion data
streams are generated.
Figure 3: Facial skeleton consists of 18 feature points. The
blue dotted line indicates direct distance between points i
and j. The green dotted line indicates path distance
between points i and j.
Table 1: FACS (Facial Action Coding System).
Emotion FACS
Anger Brow Lowerer + Upper Lid Raiser +
Lid Tightener + Lip Tightener
Contempt Lip Corner Puller + Dimpler
Disgust Nose Wrinkler + Lip Corner
Depressor + Lower Lip Depressor
Fear Inner Brow Raiser + Outer Brow
Raiser + Brow Lowerer + Upper Lid
Raiser + Lid Tightener + Lip
Stretcher + Jaw Drop
Happiness Cheek Raiser + Lip Corner Puller
Sadness Inner Brow Raiser + Brow Lowerer
+ Lip Corner Depressor
Surprise Inner Brow Raiser + Outer Brow
Raiser + Upper Lid Raiser + Jaw Drop
Table 2: Notations of equations 1, 2 and 3.
Symbol Description
S
i
j
t
Normalized distance
i,j Point index
t Frame index
p
i
t
, p
j
t
Coordinate (x,y and z) of points
L
m
Sorted point indices list of particular
Path
i
j
indexed by m
E(p
i
t
,p
j
t
)
Euclidean distance
Path
ij
(t)
Path distance, see Figure 3 for more
detail.
N
Number of points on facial skeleton
#Node_ij
Number of points between i and j
3.2 SSS Feature Extraction
We could separate this phase into two steps;
Template dictionary generation and feature
extraction.
(1) Template Dictionary Generation
Firstly, we have to manually split the motion streams
to several gesture instances.
Secondly, we have to pick the instance that has
the highest frame number to be the reference
instance, and then compute DTW distance between
the reference sequence and the rest of sequences.
After receiving DTW distances for all pairs of
gesture instances, we have to do ascending sorting
(quick sort). Please be informed that DTW distance
can indicate the similarity between two sequences.
After sorting, the gesture instances those resemble
each other - DTW distance values are close - will be
located close together.
Next, we have to group the gesture instances that
have DTW distance close to each other to be in the
same cluster, and then average all gesture instances
in the same cluster to be just one sequence per each
cluster. To average the gesture instances that have
different frame numbers, we need to shift the shorter
sequence with the difference of frame number
divided by two. The equations and algorithm to
calculate motion template dictionary are as follows.
Where, the definition of each symbol in
equations 4, 5 and 6 is justified in Table 3.
Then, we will have the template dictionary
generated from all gesture instances as shown in
Figure 4. This time, the number of clusters per one
row is fixed to five.
Figure 4: Template dictionary (Rows * Number of
clusters).
Input: Clusters of gesture instances
Output: Template dictionary
for ∀d ∈
0,…,D-1
do
for ∀g ∈
0,…,G-1
do
A
d
g
0:F
d
g
=
M
d
g
0:F
d
g
N
d
g
(4)
Number of clusters
. . .
. . .
Rows
(
153
)
Brow
Lid
Lip Dimple
Jaw
Nose
Cheek
Brow
Lid
Cheek
Dimple
i
j
Path
SIGMAP 2016 - International Conference on Signal Processing and Multimedia Applications
22
for ∀k ∈ 0,…,N
d
g
-1do
Fs
dk
g
=
F
d
g
-f
dk
g
2
(5)
for∀t ∈ Fs
dk
g
,…,f
dk
g
+Fs
dk
g
do
A
d
g
t
= A
d
g
t
+
S
dk
g
t-Fs
dk
g
N
d
g
(6)
(2) Feature Extraction
After receiving template dictionary which is
generated from the gesture instances of human face,
we will use it to extract the feature vectors from the
stream. Therefore, all streams will be scanned again
to calculate DTW distance starting from current
frame with each sequence inside template dictionary.
The minimum DTW distance will be used as one
attribute of feature vector. Equations 7, 8, 9 and 10
are the equations to calculate DTW distance.
Given sequences X and Y
f
0,0
= 0, f
i,0
= f
0,j
= ∞
(7)
f
i,j
= (x
i
- y
j
)
2
+min
f
i,j-1
f
i-1,j
f
i-1,j-1
(8)
(i = 1,…,n; j = 1,…,m)
C =
0
∞
⋮
∞
∞
⋱
…
⋱
∞
f(n,m)
;C
∈
R
n×m
(9)
D
X,Y
= f(n,m)
(10)
Where, the definition of each symbol in equations 7,
8, 9 and 10 is justified in Table 3.
The stream monitoring technique of (Sakurai et
al., 2007) is adapted to our approach to determine
the number of frame of sequence Y by finding the
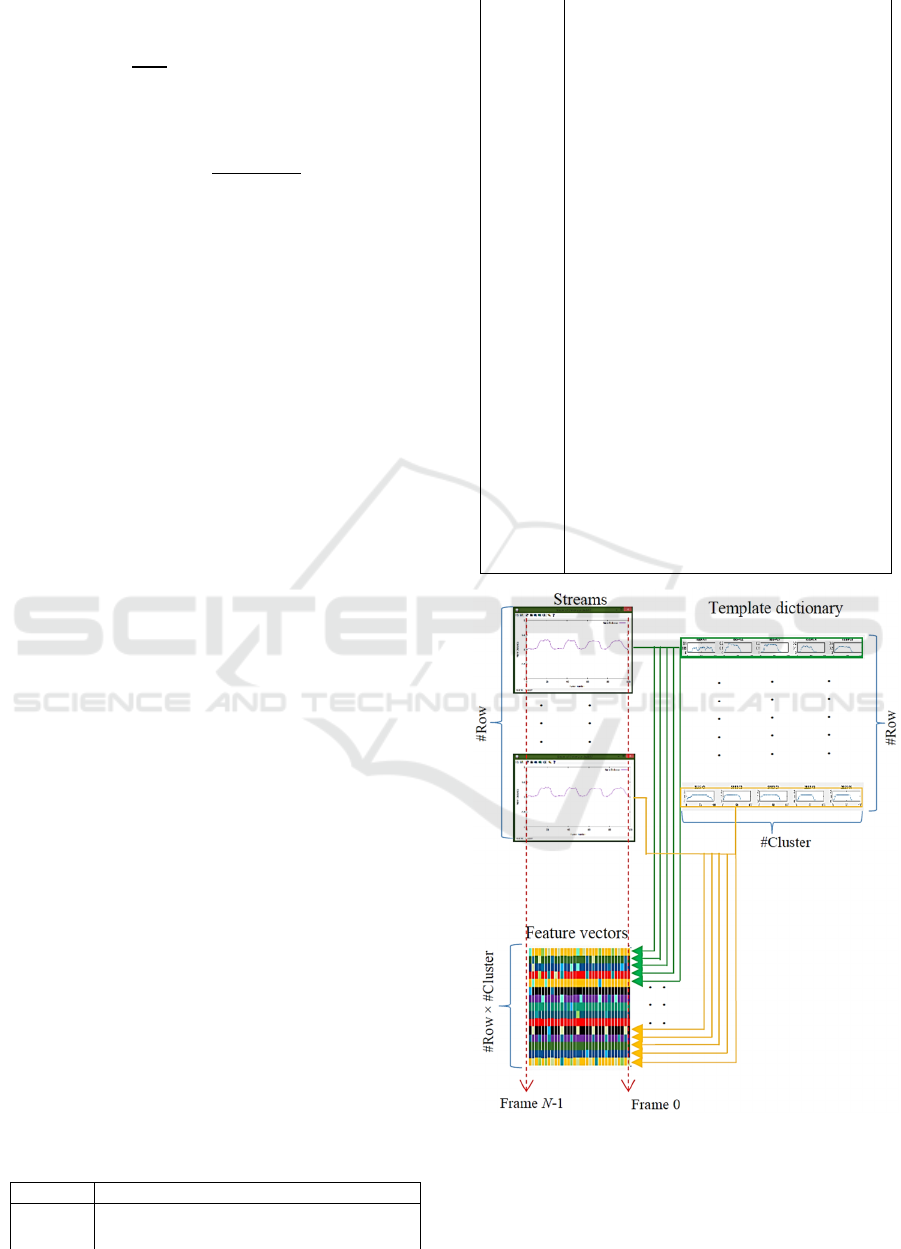
optimal ending frame. The process of scanning can
be shown in Figure 5. Each row of streams, starting
from current frame to the optimal ending point, will
be scanned with every sequence in the same row of
template dictionary to get DTW distance. Each row
will produce G attributes of feature vector.
Therefore, after this step, the feature vector for one
frame will consist of 153*5 = 765 attributes (in case
of G = 5) and be ready for the classification process.
Table 3: Notations of equations 4 to 10.
Symbol Description
A
d
g
0:F
d
g
Averaged sequence of cluster g in row d,
Frame starts from 0 to F
d
g
g
Cluster index
G
Number of clusters
d
Row d
D
Number of rows
F
d
g
Maximum frame number of cluster g in
row d
N
d
g
Number of sequences to be averaged in
cluster g row d
Fs
dk
g
Number of frame to be shifted of
sequence k in cluster g of row d
f
dk
g
Number of frames of sequence k in
cluster g of row d
k
Sequence index
t
Frame index
S
dk
g
0:f
dk
g
Sequence k of cluster g in row d, Frame
starts from 0 to f
dk
g
M
d
g
0:F
d
g
The gesture instance whose frame number
is maximum of cluster g in row d
f
i,j
The element i,j inside C
C
DTW cost matrix
n
Maximum frame of sequence X
m
Maximum frame of sequence Y
D
X,Y
DTW distance between X and Y
∞
Very high value
X
Sequence in template dictionary
Y
Sequence starting from current frame to
optimal ending frame
Figure 5: Overall process of feature extraction step, each
row of streams will produce G attributes of feature vector.
After the process of scanning, the feature vector for one
frame will consist of G (number of clusters of template
dictionary) × number of rows attributes.
Multiple Classifier Learning of New Facial Extraction Approach for Facial Expressions Recognition using Depth Sensor
23
4 EXPERIMENTS
Since there was no data set available for our
proposed approach, we have presented the method to
construct the data set by ourselves. We designed and
developed the software to collect the data set and the
Graphical User Interface (GUI) of our software is
shown in Figure 6. Data set collector software was
developed by C# .net with Kinect API (all are
packed with Kinect for Windows SDK).
The software was able to collect eight emotions
including happiness, sadness, surprise, fear, anger,
disgust, contempt and neutral. The actors had 15
seconds (325 frames) for expressing each emotion.
Each frame consisted of 1347 coordinates and it
would be reduced after FACS selection process.
This time, we have collected data set from fifteen
actors for our experiment (eight emotions per each).
In each emotion, they have been asked to freely act
three times of emotions in according with the
emotion label shown on the screen because we
wanted to get the data that intuitively represented
their emotions. Therefore we had 325*8*15 =
39,000 frames which could be separated into 3*8*15
= 360 gesture instances for template dictionary
generation phase. The system environment for our
experiment was Intel® core™ i5-4570 3.20GHz, 4
GB DDR2, Windows 8.1x64, GPU NVIDIA
GeForce GTX 750 Ti. We decided to use native C++
in order to be able to use CUDA (Yang et al., 2008)
architecture provided by NVIDIA GeForce GPU
which could activate multi-thread processing on
GPU. Therefore our feature extraction was executed
in parallel processing.
Due to the constraints of time and system
environment, we have fixed the number of clusters
in template dictionary to five clusters (G = 5).
As we have mentioned in an introduction, the
goal of our current work was to find the best fitting
parameter of classifier. From our previous work, we
have used K-NN and SVM. So, we continued using
these classifiers with various values and kernel
functions. 10-fold cross validation was used for the
performance and accuracy evaluation. An open
source software named RapidMiner which was
popular, convenient and reliable described in paper
of Jović et al. (2014) was used in classification
phase.
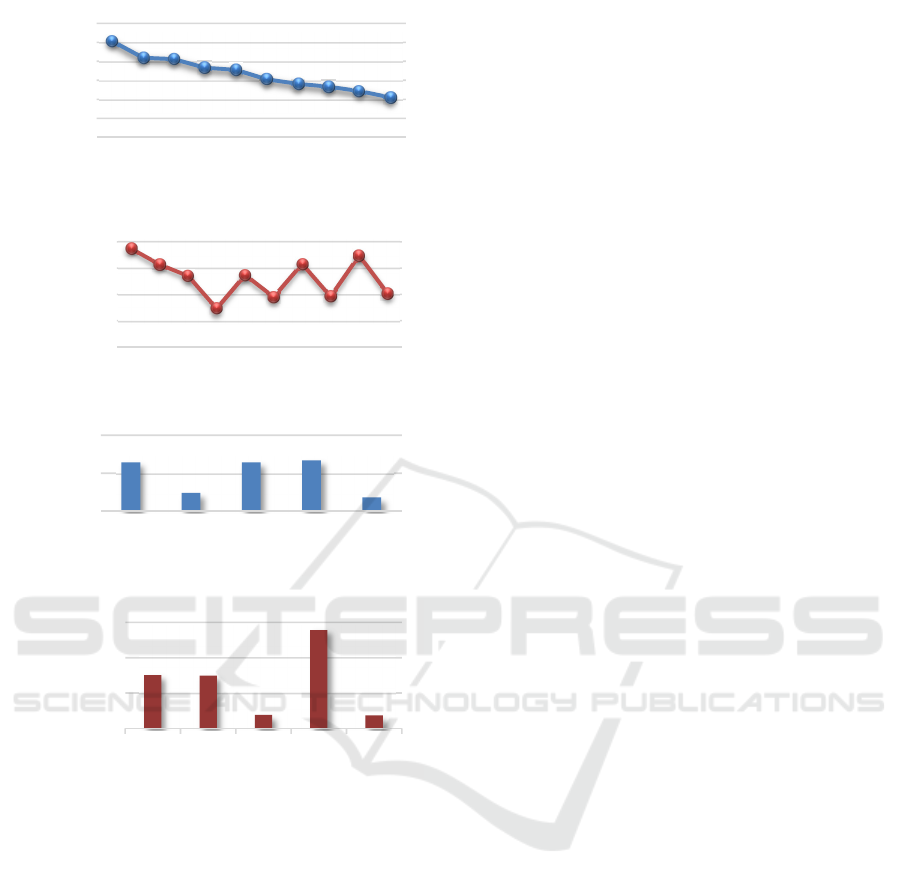
Figure 7(a) shows the result of K-NN classifier
working with various values of k parameter. As you
might see, the accuracy linearly decreases when the
value of k is raised. Consequently, k equals to one is
the best fitting value which reflects the best accuracy
of 90.33%.
The execution time of K-NN is quite linear.
1,200 frames were sampled from 39,000 frames for
training and testing. As shown in Figure 7(b), the
execution time swings between 1.7 to 1.8 seconds,
whether increasing or decreasing k.
Figure 7(c) manifests the result of classifying
with SVM. The kernels we used for the experiment
consisted of five kernels - Dot, Radial, Linear,
Polynomial degree 2 and degree 3 respectively. The
result seems to be worse than K-NN, especially with
polynomial degree three kernel. It shows the worst
accuracy which is just 18.08%, nevertheless, if we
change to polynomial degree two, it reveals an
outstanding result among those kernel functions of
SVM. The execution time of SVM is severely high
comparing to K-NN as shown in Figure 7(d).
The reason why K-NN distinctly beats SVM is
the problem of our feature vectors having very high
dimension or attribute number. Even though SVM
has many kernel functions to modify the dimension
of input space, there seems to be no kernel function
that could make a good feature space linearly
separable by the hyperplane.
Figure 6: Data set collector software.
Tables 4 and 5 are the confusion matrices of K-
NN with k = 1 and SVM with Polynomial degree
two respectively. The accuracy of detecting fear is
the worst. In contrast, the detection accuracy of
neutral overcomes all other emotions. It is more
confusion in fear because the expression is
ambiguous and rather similar to surprise. Therefore,
there is a high probability to get confused with
surprise, whereas the motion of neutral is clearer.
So, we could get the best accuracy in this case.
Table 6 shows the accuracy comparison between
proposed approach and state-of-the-art approach
(Mao et al., 2015). Since there are several different
factors, such as data set, system environment,
number of classes, classifier etc. mentioned in
related works section, the information in this table is
SIGMAP 2016 - International Conference on Signal Processing and Multimedia Applications
24
(a)
(b)
(c)
(d)
Figure 7: Experimental result. (a) Accuracy of K-NN, (b)
Execution time of K-NN, (c) Accuracy of SVM, (d)
Execution time of SVM.
just a rough comparison. We want to manifest the
accuracy comparison between approaches that use
contemporary depth sensor, particularly Kinect, in
this table. The average accuracy of the proposed
approach is 66.66% for SVM with polynomial
degree two and 90.19% with k = 1 for K-NN which
is higher than the average accuracy of the state-of-
the-art approach which is 80.57%. Furthermore, our
approach could eliminate intra-class variation
occurring in their approach which could help
reducing some constraints in their work, for
example, reducing number of data set (viewpoint,
anthropometry and personal style variation are
eliminated), and avoiding pre-segmentation before
classification (execution rate variation is
eliminated).
5 CONCLUSIONS
By the helps of several high efficient techniques and
sensors, we could achieve all those goals we have
defined in the first place.
Firstly, our proposed approach could reduce
intra-class variations from human facial emotion
recognition system.
The most suitable classifier for our feature
extraction approach was K-NN with k = 1, which
resulted the best accuracy and speed.
Our approach succeeded on adapting SSS
approach to facial emotion detection. Moreover, the
accuracy was 90.33% +/- 1.91% for K-NN and 67%
+/- 4% for SVM.
The accuracy of our proposed approach (K-NN)
outperformed the state-of-the-art approach (Mao et
al., 2015) around 9.62% higher.
From our study, we have learnt that intra-class
variation was one of the most extreme factors which
could decrease the accuracy of facial recognition
system and this was the evidence to proof our
hypothesis about the persistence of intra-class
variation in facial emotion expression. SSS feature
extraction approach might not be the best approach
to solve the intra-class variations, but it showed a
promising consequence of utilizing facial motion
stream and depth sensor and it proofed that we could
use depth sensor to classify human emotions.
In the future, we planned to study the rest of
parameters, for example, number of clusters, number
of points on the facial skeleton and etc. in order to
find the most appropriate value which could result
better accuracy and performance. Furthermore, we
planned to implement real-time classification with
SSS feature extraction approach.
90,33
85,92
85,58
83,33
82,75
80,25
79,08
78,33
77,17
75,5
65
70
75
80
85
90
95
12345678910
Accuracy %
k
1,79
1,76
1,74
1,67
1,74
1,70
1,76
1,70
1,77
1,70
1,6
1,65
1,7
1,75
1,8
12345678910
Execution time
(sec.)
k
64,5
24,17
64,5
67
18,08
0
50
100
Dot Radial Linear Poly.
deg.2
Poly.
deg.3
Accuracy %
Kernel
151,03
149,62
38,38
278,52
36,74
0,00
100,00
200,00
300,00
Dot Radial Linear Poly.
deg 2
Poly.
deg 3
Execution time (sec.)
Kernel
Multiple Classifier Learning of New Facial Extraction Approach for Facial Expressions Recognition using Depth Sensor
25
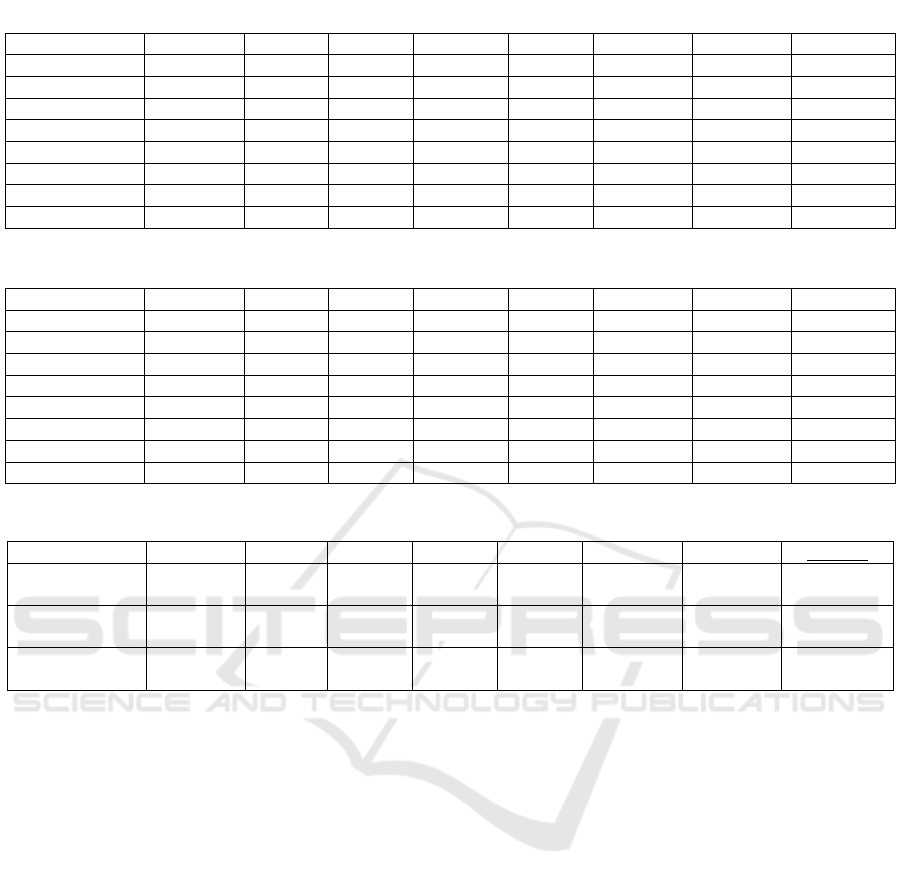
Table 4: SSS feature vector with K-NN, k = 1.
Actual class↓ Happiness Sadness Surprise Fear Anger Disgust Contempt Neutral
Happiness
94.67
0.67 0.00 1.33 0.00 0.00 0.67 2.67
Sadness 2.00
88.67
2.00 1.33 1.33 1.33 2.00 1.33
Surprise 1.33 2.67
88.67
4.00 0.00 1.33 0.67 1.33
Fear 5.33 2.67 3.33
82.67
0.67 3.33 0.67 1.33
Anger 0.00 2.67 4.00 0.00
86.00
2.67 2.00 2.67
Disgust 0.00 0.00 0.67 0.67 0.67
94.67
3.33 0.00
Contempt 1.33 1.33 0.00 1.33 2.67 0.67
91.33
1.33
Neutral 1.33 0.67 0.00 0.67 0.67 0.00 0.67
96.00
Table 5: SSS feature vector with SVM, Polynomial degree 2.
Actual class↓ Happiness Sadness Surprise Fear Anger Disgust Contempt Neutral
Happiness
78.00
4.67 0.00 2.67 2.67 4.00 0.00 8.00
Sadness 2.67
69.33
4.00 5.33 3.33 1.33 4.00 10.00
Surprise 4.67 6.00
67.33
10.00 1.33 2.00 3.33 5.33
Fear 15.33 7.33 9.33
50.00
3.33 3.33 4.00 7.33
Anger 2.00 4.00 0.67 2.00
63.33
2.67 14.00 11.33
Disgust 6.00 7.33 1.33 4.67 12.00
55.33
8.67 4.67
Contempt 6.00 1.33 0.00 2.67 2.67 7.33
69.33
10.67
Neutral 5.33 4.00 0.67 2.67 1.33 2.67 0.00
83.33
Table 6: Accuracy comparison between each approach.
Approach↓ Happiness Sadness Surprise Fear Anger Disgust Neutral Average
Mao et al.,
(2015)
75.58 73.74 96.40 80.00 79.27 79.54 79.52
80.57
Proposed
approach
*1
94.67 88.67 88.67 82.67 86.00 94.67 96.00
90.19
Proposed
approach
*2
78.00 69.33 67.33 50.00 63.33 55.33 83.33
66.66
*1
K-NN with k = 1, *2
SVM with Polynomial degree 2
REFERENCES
Chanthaphan, N., Uchimura, K., Satonaka, T., Makioka,
T., 2015. Facial emotion recognition based on facial
motion stream generated by Kinect. In 11th
International Conference on Signal-Image Technology
& Internet-Based Systems (SITIS). pp. 117-124.
Chanthaphan, N., Uchimura, K., Satonaka, T., Makioka,
T., 2016. New feature extraction method for facial
emotion recognition by using Kinect. In The Korea-
Japan joint workshop on Frontiers of Computer Vision
(FCV). pp. 200-205.
Cootes, T. F., Taylor, C. J., 1992. Active shape models -
Smart snakes. In Proc. British Machine Vision
Conference (BMVC). pp. 266-275.
Cootes, T. F., Edwards, G. J., Taylor, C. J., 1998. Active
appearance models. In 5th European Conference on
Computer Vision (ECCV). vol. 2, no. 1, pp. 484-498.
Cristinacce, D., Cootes, T. F., 2006. Feature detection and
tracking with constrained local models. In Proc.
British Machine Vision Conference (BMVC). vol. 3,
no. 1, pp. 929-938.
Blanz, V., Vetter, T., 1999. A morphable model for the
synthesis of 3D faces. In Proc. the 26th Annual
Conference on Computer Graphics and Interactive
Techniques (SIGGRAPH '99). pp. 187-194.
Baltrusaitis, T., Robinson, P., Morency, LP., 2012. 3D
constrained local model for rigid and non-rigid facial
tracking. In Proc. IEEE Conference on Computer
Vision and Pattern Recognition (CVPR). pp. 2610-
2617.
Zhao, X., Li, X., Pang, C., Sheng, Q. Z., Wang, S., Ye,
M., 2014. Structured streaming skeleton - a new
feature for online human gesture recognition. In ACM
Trans. Multimedia Comput. Commun. Appl.. vol. 11,
no. 1, pp. 1-18.
Baggio, D. L., Emami, S., Escrivá, D. M., Ievgen, K.,
Mahmood, N., Saragih, J., Shilkrot, R., 2012.
Mastering OpenCV with practical computer vision
projects. Packt Publishing Ltd. Birmingham. pp. 235-
260.
Dementhon, D. F., Davis, L. S., 1995. Model-based object
pose in 25 lines of code, In International Journal of
Computer Vision. vol. 15, no. 1-2, pp. 123-141.
Lawson, C. L., 1972. Transforming triangulations, In
Discrete Mathematics. vol. 3, no. 1, pp. 365-372.
Zhu, X., Ramanan, D., 2012. Face detection, pose
SIGMAP 2016 - International Conference on Signal Processing and Multimedia Applications
26

estimation, and land mark localization in the wild, In
Proc. IEEE Computer Vision and Pattern Recognition
(CVPR). pp. 2879-2886.
Zhang, Z., 2012. Microsoft Kinect sensor and its effect. In
IEEE Computer Society. vol. 19, no. 2, pp. 4-12.
Piana, S., Staglianò, A., Odone, F., Verri, A., Camurri, A.,
2014. Real-time automatic emotion recognition from
body gestures. Cornell university library: Computing
Research Repository (CoRR), pp. 1-7.
Mao, Q. R., Pan, X. Y., Zhan, Y. Z., Shen, X. J., 2015.
Using Kinect for real-time emotion recognition via
facial expressions. In Frontiers of Information
Technology & Electronic Engineering, vol. 16, no. 4,
pp. 272-282.
Ekman, P., Friesen, W., 1976. Measuring facial
movement. In Environmental psychology and
nonverbal behaviour. pp. 56-75.
Sakoe, H., Chiba, S., 1978. Dynamic programming
algorithm optimization for spoken word recognition.
In IEEE Trans. on Acoustics, Speech and Signal
Processing. vol. 26, no. 1, pp. 43-49.
Sakurai, Y., Faloutsos, C., Yamamuro, M., 2007. Stream
monitoring under the time warping distance. In Proc.
IEEE International Conference on Data Engineering
(ICDE). pp. 1046-1055.
Yang, Z., Zhu, Y., Pu, Y., 2008. Parallel Image Processing
Based on CUDA. In Computer Science and Software
Engineering. vol. 3, no. 1, pp.198-201.
Jovic, A., Brkic, K., Bogunovic, N., 2014. An overview of
free software tools for general data mining. In Proc.
Information and Communication Technology,
Electronics and Microelectronics (MIPRO). pp. 1112-
1117.
Multiple Classifier Learning of New Facial Extraction Approach for Facial Expressions Recognition using Depth Sensor
27
