
Control of Uncertain Robot Manipulators using Integral Backstepping
and Time Delay Estimation
Yassine Kali
1
, Maarouf Saad
2
, Khalid Benjelloun
1
and Mohammed Benbrahim
3
1
Ecole Mohammadia d’Ingenieurs, Mohammed V University, Rabat, Morocco
2
Ecole de Technologie Superieure, Quebec University, Montreal, Canada
3
Sciences Faculty, SMBA University, Fez, Morocco
Keywords:
Integral Backstepping, Time Delay Control, Trajectory Tracking, Robot Manipulators.
Abstract:
In this paper, a novel controller is proposed and applied for high accuracy tracking trajectory in the workspace
of robot manipulators in presence of uncertainties and external disturbances. Most of nonlinear controllers are
based on the mathematical model of robot manipulator, but a lot of robotic systems do not have exact model.
This novel approach which consists on designing an Integral Backstepping with Time Delay Control (IBTDC)
can estimate uncertainties and keep high tracking performance. The proposed controller is able to stabilize
the robot system, and also to drive the trajectory tracking errors to converge in finite time. Furthermore,
experimental results are given to illustrate the effectiveness of the proposed method applied to the 7-DOF
ANAT robot arm.
1 INTRODUCTION
Control of robot manipulators, has received wide at-
tention and is a topic of great research interest. These
research works have focused on tracking control prob-
lems in the joint and task space. In literature, we can
find many nonlinear techniques such as Sliding Mode
Control (SMC) (Utkin et al., 1999), Feedback Lin-
earization (Park and Cho, 2007), Backstepping (H.-
J.Shieh and C.-H.Hsu, 2008). However, the robot
manipulators are uncertain Multiple-Input Multiple-
Output (MIMO). They suffer from the plant uncer-
tainties due to uncertain parameters, load variations
and external disturbances, which may seriously de-
grade the performance of the tracking control and/or
deteriorate the controlled system.
The backstepping approach is a recursive Lya-
punov procedure, proposed in the beginning of 1990s.
This approach was introduced first in (P.V. Kokotovic,
1995). The basic idea of this technique is to design a
controller by selecting appropriate stabilization func-
tions for some state variables chosen as virtual con-
trols (Slotine and Li, 1991; Lewis et al., 1993). This
allows, in addition to the control objective for which
the technique is developed (tracking and/or stabiliza-
tion), to ensure, at all times, the stability of the con-
trolled system. Therefore, Backstepping provides ro-
bust and high-accuracy solutions. However, one main
restriction remains. Nonlinear backstepping is sensi-
tive to uncertainties and external disturbances, other-
wise, the control may easily cause unacceptable prac-
tical complications.
To cope with the aforementioned problem, some
works proposed adaptive backstepping (H.-J.Shieh
and C.-H.Hsu, 2008; Zhou and Wen, 2008) which
provide an adaptation of the control to be sufficiently
robust to eliminate the effect of uncertain nonlinear
dynamics and unexpected disturbances but this over-
parametrization may cause inequality of the num-
ber of parameter estimates and the number of un-
known parameters. Other works proposed a combi-
nation of backstepping and intelligent control tech-
niques (neural-network or fuzzy logic) (Jagannathan
and Lewis, 1998; Weisheng et al., 2015; Yoo and
Ham, 2000; Su et al., 2015). These controllers have
the merit to estimate uncertain dynamics and unex-
pected disturbances but they introduce fuzzy rules in
case of fuzzy logic or a large number of parameters
in case of neural-network that may make implemen-
tation impossible.
A possible solution to consider is a combination
of Integral Backstepping (Tan et al., 2000; Skjetne
and Fossen, 2004) and Time Delay Control (TDC)
Kali, Y., Saad, M., Benjelloun, K. and Benbrahim, M.
Control of Uncertain Robot Manipulators using Integral Backstepping and Time Delay Estimation.
DOI: 10.5220/0005950201450151
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 145-151
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
145
(Youcef-Toumi and Ito, 1990; Hsia and Gao, 1990).
TDC can estimate unknown dynamics and exter-
nal disturbances simply and effectively using time-
delayed information provided from control inputs sig-
nals and the states variables without a prior exact
knowledge of robot model. When the TDC is applied,
a so-called TDE error appear that can be reduced us-
ing integral backstepping, else, the system will lead
with a large steady state error. As a consequence it
can be expected that the system can be stabilized even
in presence of uncertainties and external disturbances.
The paper is organized in five sections. In Section
2, the dynamics of serial n-link rigid robot manip-
ulators is presented with sufficient property and as-
sumptions. In Section 3, the design of the controller
called integral backstepping with time delay control
is described with stability analysis using Lyapunov
function. In Section 4, experimental results of the
proposed method applied to the 7-DOF ANAT robot
are presented and comparison with nonlinear back-
stepping and Sliding Mode with Time Delay Con-
trol (SMTDC) is discussed. Finally, the conclusion
is drawn in section 5.
2 PROBLEM FORMULATION
The dynamic model expressed in joint space coor-
dinates according to the Lagrange theory of n-joint
robot manipulator is given by:
M(q) ¨q+C(q, ˙q) ˙q+ G(q) + F( ˙q) − τ
d
= τ (1)
where q ∈ R
n
, ˙q ∈ R
n
and ¨q ∈ R
n
are the joint po-
sitions, velocities and accelerations vectors, respec-
tively, M(q) ∈ R
n×n
is the symmetric positive-definite
inertia matrix, C(q, ˙q) ˙q ∈ R
n
is the centrifugal and
Coriolis vector, G(q) ∈ R
n
is the gravitational vec-
tor, F( ˙q) ∈ R
n
is the viscous/static friction torque at
the joints vector, τ
d
∈ R
n
denotes disturbance vector
and τ ∈ R
n
is the torque input vector. The inertia ma-
trix can be written into two parts, without loss of any
generality:
M(q) = M
0
(q) + ∆M(q) (2)
where M
0
(q) is the nominal part while ∆M(q) denotes
the uncertain part. Then, we can rewrite the model
given in Eq.1 as:
M
0
(q) ¨q+ H(q, ˙q, ¨q) = τ (3)
where
H(q, ˙q, ¨q) = ∆M(q) ¨q+C(q, ˙q) ˙q+ G(q) + F( ˙q) − τ
d
For ease of control design, let’s denote M
0
= M
0
(q)
and H = H(q, ˙q, ¨q).
The objective in this paper is to design a robust
controller able to ensure that the joint position q tracks
a desired trajectory q
d
with high accuracy even if the
dynamics is uncertain and in presence of external dis-
turbances. To this end, we will design the controller
and carry out its stability analysis based on the fol-
lowing property and assumptions:
• Property 1. The nominal part of inertia ma-
trix M
0
(q) is positive-definite symmetrical and
bounded such that:
m
1
I ≤ M
0
(q) ≤ m
2
I
where m
1
and m
2
are two known positive con-
stants (Spong et al., 2005).
• Assumption 1. The joint position states and its
first time derivative are measurable.
• Assumption 2. H is a globally lipschitz function.
3 IBTDC
3.1 Controller Design
For the development of this method, we consider the
robot system given by Eq.3. As said before, the con-
trol objective is to track a desired trajectory with high
accuracy even in the presence of nonlinear unknown
dynamics and external disturbancesby designing a ro-
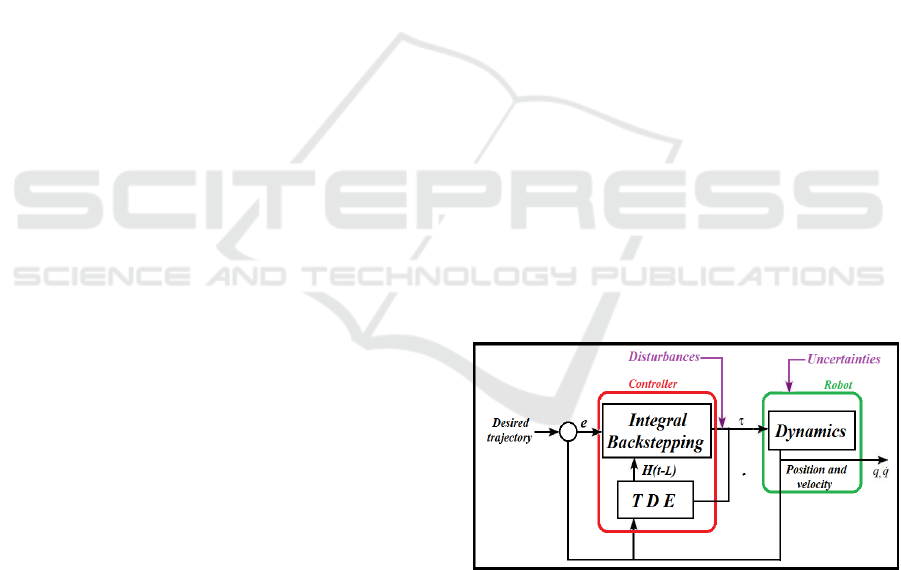
bust control. The closed-loop system is represented in
Fig.1.
Figure 1: Block diagram of the proposed controller.
For the development of IBTDC, we define the po-
sition tracking error e:
e = q− q
d
(4)
where q
d
∈ R
n
is the desired position trajectory vec-
tor. Now, let’s select the regulated variable ε
1
as fol-
lows:
ε
1
= e + λ
Z
t
0
edt (5)
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
146

where λ = diag(λ
ii
) for i = 1,· ·· ,n is a positive con-
stant gain matrix. Its time derivative is:
˙
ε
1
= ˙e+ λe
= ˙q− ˙q
d
+ λe (6)
Choosing ˙q as virtual control variable, we select the
following stabilizing function as:
α
1
= ˙q
d
− λe− K
1
ε
1
(7)
where K
1
= diag(k
1i
) for i = 1,· ·· , n is a positivecon-
stant diagonal gain matrix that are in direct relation
with the convergence rate. Defining now the error
ε
2
obtained by the difference between the stabilizing
function and virtual control in Eq.6 as:
ε
2
= ˙q− α
1
= ˙q− ˙q
d
+ λe+ K
1
ε
1
=
˙
ε
1
+ K
1
ε
1
(8)
Thus in terms of Eq.8, we can rewrite Eq.6 as follows:
˙
ε
1
= ε
2
− K
1
ε
1
(9)
Therefore, differentiating Eq.8 with respect to time
leads to:
˙
ε
2
= ¨q−
˙
α
1
= ¨q− ¨q
d
+ λ˙e+ K
1
˙
ε
1
= M
−1
0
[τ− H] − ¨q
d
+ λ˙e+ K
1
˙
ε
1
(10)
According to the Lyapunov stability analysis, we
choose:
˙
ε
2
= −K
2
ε
2
− ε
1
(11)
where K
2
= diag(k
2i
) for i = 1,· ·· , n is a positivecon-
stant diagonal gain matrix. Then, we obtain:
τ = M
0
u+ H (12)
where u = ¨q
d
− λ˙e− K
1
˙
ε
1
− K
2
ε
2
− ε
1
.
The control performance is affected since H is un-
certain. Then, if Assumption 2 given in Section 2 is
verified we can estimate H(t) using a TDE (Youcef-
Toumi and Ito, 1990; Hsia and Gao, 1990) as:
ˆ
H(t)
∼
=
H(t − L)
= τ(t − L) − M
0
(t − L) ¨q(t − L) (13)
where L is the estimation time delay. Clearly the ac-
curacy of
ˆ
H(t) improves as L decreases. In practice,
the smallest estimation time delay L is chosen to be
the sampling period which means that the unknown
dynamics are identified every L times. Then, the pro-
posed integral backstepping with time delay control is
obtained as:
τ = M
0
u+
ˆ
H
= τ(t − L) − M
0
(t − L) ¨q(t − L) + M
0
u (14)
As ¨q(t − L) may not be at our disposal, we use:
¨q(t − L) =
1
L
2
(q(t) − 2q(t − L) + q(t − 2L)).
3.2 Stability Analysis
To prove the stability of the overall system, the fol-
lowing Lyapunov function candidate is used:
V =
1
2
ε
T
1
ε
1
+ ε
T
2
ε
2
(15)
Taking time derivative gives:
˙
V = ε
T
1
˙
ε
1
+ ε
T
2
˙
ε
2
= ε
T
1
(ε
2
− K
1
ε
1
)
+ε
T
2
M
−1
0
[τ− H] − ¨q
d
+ λ ˙e+K
1
˙
ε
1
= −ε
T
1
K
1
ε
1
+ ε
T
1
ε
2
+ε
T
2
M
−1
0
[τ− H] − ¨q
d
+ λ ˙e+K
1
˙
ε
1
(16)
Using Property 1 given in Section 2 and replacing
the IBTDC given in Eq.14 in the Lyapunov function
derivative given in Eq. 16, we obtain:
˙
V = −ε
T
1
K
1
ε
1
+ ε
T
1
ε
2
− ε
T
2
ε
1
+ε
T
2
M
−1
0
[
ˆ
H − H] − K
2
ε
2
= −ε
T
1
K
1
ε
1
+ ε
T
2
M
−1
0
∆H − K
2
ε
2
≤ −ε
T
1
K
1
ε
1
− ε
T
2
K
2
ε
2
+ ε
T
2
1
m
1
I
n
∆H
≤
n
∑
i=1
−k
1i
ε
2
1i
− |ε
2i
|
k
2i
|ε
2i
| −
1
m
1
|∆H
i
|
(17)
where ∆H =
ˆ
H − H is the TDE error and I
n
∈ R
n×n
denotes the identity matrix. To ensure
˙
V is a negative-
definite function, the following condition must be ful-
filled:
k
2i
>
1
m
1
|∆H
i
||ε
2i
|
−1
(18)
Otherwise, using Assumption 2, we have:
|∆H
i
| = |
ˆ
H
i
− H
i
|
= |H
i
(t − L) − H
i
(t)|
≤ l
i
|(t − L) − (t)|
≤ l
i
L (19)
where l
i
> 0 is the Lipschitz constant. Then, the con-
dition given in Eq. (18) becomes:
k
2i
>
l
i
L
m
1
|ε
2i
|
−1
(20)
Therefore, the Lyapunov function derivative is
negative definite
˙
V < 0, i.e, the error e and its deriva-
tives go to zero, hence the stability of the closed loop
system is proven.
Control of Uncertain Robot Manipulators using Integral Backstepping and Time Delay Estimation
147
4 CASE STUDY
To illustrate the effectiveness of the proposed con-
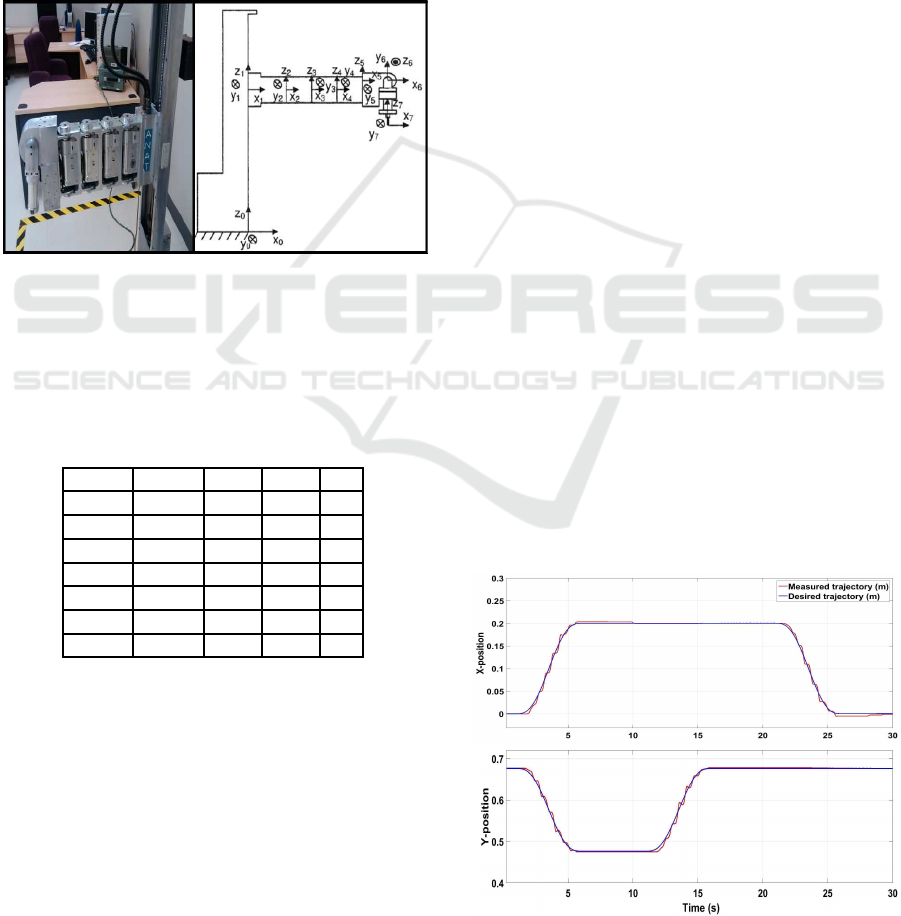
troller, the IBTDC is implemented on the ANAT robot
shown in Fig.2 using Simulink with Real-Time Work-
shop (RTW). ANAT robot is a 7-DOF hyper redun-
dant articulated nimble adaptable trunk: the first joint
is prismatic (joint 1), followed by three redundant ro-
tational joints (joints 2, 3, and 4) and finally three ro-
tational joints (joints 5, 6, and 7), the end-effector is
mounted on the last joint (Fareh et al., 2012). For sim-
plicity, three joints are locked during the experimental
tests (joints 1, 6 and 7).
Figure 2: ANAT robot arm and D-H frames.
For the ANAT robot, modified Denavit-
Hartenberg (D-H) convention (Dombre and Khalil,
2007) is used for selecting frames of references as
shown in Fig.2. The D-H parameters of the ANAT
robot are given in Tab.1.
Table 1: D-H parameters of 7-DOF ANAT robot.
Joints α
i−1
a
i−1
d
i
q
i
1 0 0 q
1
0
2 0 L
1
0 q
2
3 0 L
0
0 q
3
4 0 L
0
0 q
4
5 0 L
0
L
2
q
5
6 π/2 L
3
0 q
6
7 −π/2 0 −L
4
q
7
The initial position of the end-effector in task
space is x(0) = [0.6764 0 − 0.196] while the ini-
tial joint positions and joint velocities are 0 rad and
0 rad/sec, respectively. The objective here is to fol-
low a desired triangle defined in XY plane of the task
space of the ANAT robot. For our robot, assuming
that the desired trajectory is away from singular con-
figuration, the desired accelerations in joint space and
the desired accelerations and velocities in task space
are linked by:
¨q
d
= J
+
¨x
d
− J
+
˙
JJ
+
˙x
d
(21)
where J denotes the Jacobian matrix, J
+
= J
T
(JJ
T
)
−1
denotes the generalized inverse, ¨q
d
is the desired joint
acceleration vector, ¨x
d
is the desired workspace ac-
celeration vector, ˙x
d
is the desired workspace velocity
vector. The desired joint velocity ˙q
d
is obtained from
desired joint acceleration using an integrator while the
desired joint position q
d
is obtained from desired joint
velocity using another integrator.
During the experiment, we placed a load of 2.25kg
on the 5
th
joint at t = 10s. In addition, a disturbances
was added to the torque input representing 10% of
maximum value of the torque as:
τ
d
=
0
0.15e
−5(t−5)
2
sin(2πt)
0.15e
−5(t−5)
2
sin(3πt)
0.03e
−13(t−13)
2
sin(4πt)
0.025e
−18(t−18)
2
sin(5πt)
0
0
In Section 3, the development of IBTDC for un-
certain robot manipulators is given in Eq.14 where
the controller gains are tuned to achieve the optimal
performance such as the stability is guaranteed and
the condition given in Eq (20) is verified: λ = 5 ∗ I
7
,
K
1
= 5∗ I
7
and K
2
= 7∗ I
7
. The estimation time delay
is selected as the smallest sampling period L = T
s
=
0.03s.
4.1 Experimental Results
The experimental results are shown in Fig.3 to Fig.7:
workspace tracking, joint space tracking, joint space
tracking error and control torque input obtained by us-
ing the proposed integral backstepping with time de-
lay controller.
It is obvious that the proposed controller ensures
good tracking trajectory even in presence of uncer-
Figure 3: Workspace tracking trajectory.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
148

Figure 4: Workspace tracking error.
Figure 5: Joint space tracking trajectory.
tainties as shown in Fig.5 and confirmed by the small
tracking errors as depicted in Fig.6. In addition, using
the direct kinematics, we can notice that the controller
ensures also a good tracking in task space as shown
in Fig.3 and Fig.4. However, using integral backstep-
ping cause a small overshoot. From Fig.7, we observe
Figure 6: Joint space tracking error.
that the control inputs evolves continuously with ac-
ceptable values for the motors of the ANAT robot.
To show the effectiveness of the proposed IBTDC,
it is compared with the nonlinear backstepping (Zhou
and Wen, 2008) and the SMTDC (?) in terms of
energy and stability by using the root-mean-squared
(RMS) errors and torque inputs as:
kτk
RMS
=
s
1
N
N
∑
i
kτ(k)k
2
, kek
RMS
=
s
1
N
N
∑
i
ke(k)k
2
where N denotes the number of sampling steps of
the experimentation. the quantitative analysis is pre-
sented in Tab.2
Table 2: Controllers comparison.
Controller kτk
RMS
kek
RMS
Backstepping 1.72 4.9∗ 10
−2
SMTDC 1.31 2.75∗ 10
−2
IBTDC 1.253 9.8∗ 10
−3
From the above comparison, we can notice that
IBTDC stabilizes the system even in presence of un-
Control of Uncertain Robot Manipulators using Integral Backstepping and Time Delay Estimation
149
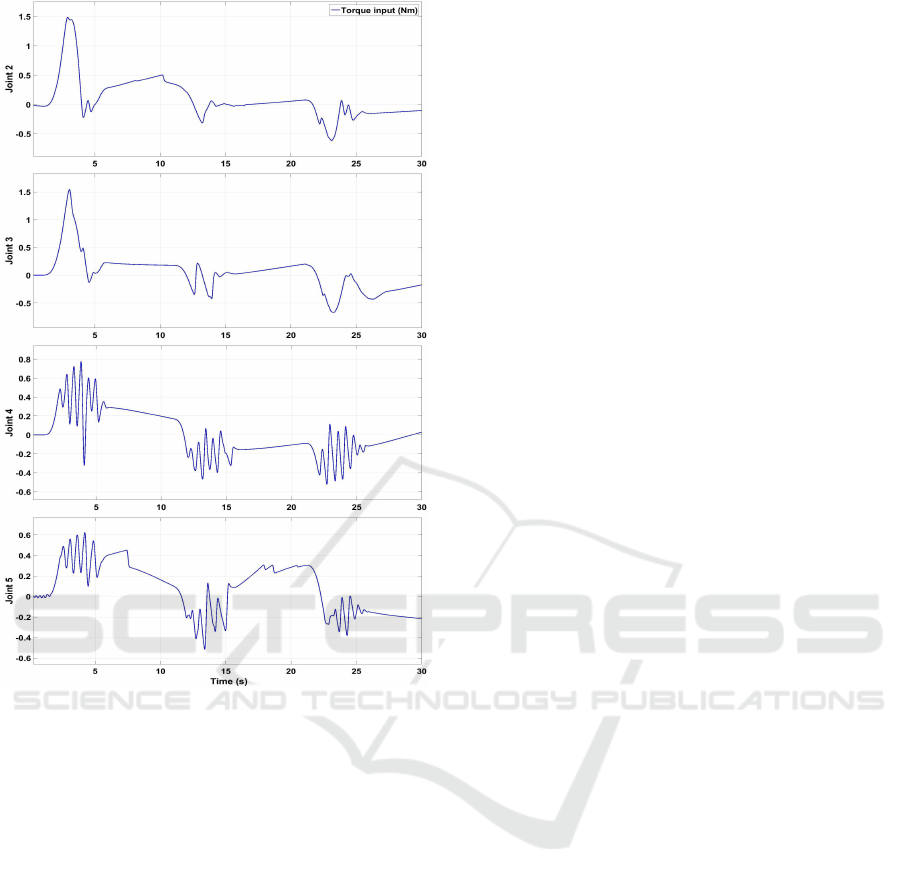
Figure 7: Control torque input.
certainties and external disturbances in finite time
with the best tracking and less energy.
5 CONCLUSIONS
For a class of uncertain n-link robot systems, an inte-
gral backstepping with time delay controller which is
a combination of integral backstepping and TDC, is
presented. TDC is used to estimate uncertain nonlin-
ear dynamics and to cancel the effect of external dis-
turbances while integral backstepping is used to elim-
inate the TDE error. Experimental results on the 7-
DOF ANAT robot showed the merit of IBTDC, par-
ticularly regarding the uncertain dynamics, external
disturbances and finite time convergence. Otherwise,
using integral backstepping may cause a large over-
shoot known as windup phenomenon. Further re-
search should be pursued in the direction to overcome
this phenomenon. We will also implement the pro-
posed controller on other nonlinear systems.
ACKNOWLEDGEMENTS
This work was supported in part by Automatic and In-
dustrial Informatics Laboratory, Ecole Mohammadia
d’Ingenieurs, Mohammed V University, Rabat, Mo-
rocco and Ecole de technologie superieure, Montreal,
Canada.
REFERENCES
Dombre, E. and Khalil, W. (2007). Modeling, Performance
Analysis and Control of Robot Manipulators. Wiley-
ISTE.
Fareh, R., Saad, M., and Saad, M. (2012). Workspace track-
ing trajectory for 7-dof anat robot using a hierarchi-
cal control strategy. In 20th Mediterranean Confer-
ence on Control and Automation, July 3-6. p. 122-127.
Barcelona, Spain.
H.-J.Shieh and C.-H.Hsu (2008). An adaptive
approximator-based backstepping control approach
for piezoactuator-driven stages. IEEE Transactions
On Industrial Electronics, 55:1729–1738.
Hsia, T. and Gao, L. (1990). Robot manipulator control
using decentralized linear time-invariant time-delayed
joint controllers. IEEE International Conference on
Robotics and Automation, 3:2070–2075.
Jagannathan, S. and Lewis, F. (1998). Robust backstep-
ping control of robotic systems using neural networks.
Journal of Intelligent and Robotic Systems, 23:105–
128.
Lewis, F., Abdallah, C., and Dawson, D. (1993). Control
of Robot Manipulators. Macmillan Publishing Com-
pany.
Park, C.-W. and Cho, Y.-W. (2007). Robust fuzzy feed-
back linearization controllers for takagi sugeno fuzzy
models with parametric uncertainties. Control Theory
Appl., IET, 1:1242–1254.
P.V. Kokotovic, M. Krstic, I. K. (1995). Nonlinear and adap-
tive control design. In Wiley, New York.
Skjetne, R. and Fossen, T. (2004). On integral control in
backstepping: Analysis of different techniques. In
Proceedings of the 2004 American Control Confer-
ence, Boston, Massachusetts.
Slotine, J. and Li, W. (1991). Applied nonlinear control.
Printice-Hall international.
Spong, M., Hutchinson, S., and Vidyasagar, M. (2005).
Robot Modeling and Control. John Wiley and Sons,
Inc.
Su, C.-Y., Li, G., Li, Z., and Su, H. (2015). Fuzzy
approximation-based adaptive backstepping control
of an exoskeleton for human upper limbs. IEEE Trans-
actions on Fuzzy Systems, 23:555–566.
Tan, Y., Chang, J., Tan, H., and Jun, H. (2000). Integral
backstepping control and experimental implementa-
tion for motion system. In IEEE International Con-
ference on Control Applications, Anchorage, AK.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
150

Utkin, V., Guldner, J., and Shi, J. (1999). Sliding mode
control in electromechanical systems. Taylor-Francis.
Weisheng, C., Ge, S., Jian, W., and Maoguo, G. (2015).
Globally stable adaptive backstepping neural network
control for uncertain strict-feedback systems with
tracking accuracy known a priori. IEEE Transactions
on Neural Networks and Learning Systems, 26:1842–
1854.
Yoo, B. K. and Ham, W. C. (2000). Adaptive control of
robot manipulator using fuzzy compensator. IEEE
Transactions on Fuzzy Systems, 8:186–199.
Youcef-Toumi, K. and Ito, O. (1990). A time delay con-
troller for systems with unknown dynamics. ASME
Journal of Dynamic System, Measurement ans Con-
trol, 112:133–141.
Zhou, J. and Wen, C. (2008). Adaptive Backstepping Con-
trol of Uncertain Systems. Springer.
Control of Uncertain Robot Manipulators using Integral Backstepping and Time Delay Estimation
151
