
Evaluation of an Arduino-based IoT Person Counter
Bruno F. Carvalho, Caio C. M. Silva, Alessandra M. Silva, Fábio Buiati
and Rafael Timóteo
Laboratório LATITUDE – Faculdade de Tecnologia, Universidade de Brasília, Campus Darcy Ribeiro, Brasília, Brazil
Keywords: IoT Devices, Arduino, Motion Sensor, Ultrasonic Sensor.
Abstract: The IoT devices can provide a wide range of information, which can be used to infer the behavior patterns
with a large semantic bias. In this sense, an IoT network has the ability to use trafficked information to perform
its own management. One type of information that can be used by an IoT network is the amount of people in
a certain place. This information, combined with others, can help IoT-based systems discover characteristics
about the environment in which it is deployed. Thus, the integration of the data captured provides the
achievement of manifold applications, such as air conditioning regulation, security access and people
management in a working environment. In this research, it is proposed the implementation of an IoT person
counter. Two different technologies were used, aiming to verify the best option to design a counter device
with low-cost microcontrollers and sensors. Experimental results shows that in controlled environments the
IoT person counter has a satisfactory accuracy. Some limitations were also identified in order to clarify the
scenarios where those devices can be used.
1 INTRODUCTION
The Internet of Things enables opportunities for more
direct integration between the physical world and
computer-based systems. Devices inserted in an IoT
environment must be able to communicate and
propagate information about the digital and physical
environment, in which they are present. The
information gathered by those devices can be used to
provide services with fully awareness of current
execution environment, and also, can be used to
minimize the power consumption, processing time
and the amount of packages trafficked on the
network.
Information of several natures can be propagated
in an IoT network, from the device hardware
specification to the data inferred based on the
information captured from the physical environment.
For example, an IoT device can send a message with
a given information about the temperature, humidity,
luminosity, or motion detection, among others. Such
information can be used to characterize the execution
environment.
However, the information provided by IoT
devices have an innate characteristic of imperfection
and its quality is highly influenced by the way it is
gathered. In fact, this information may even be
incorrect. Most sensors feature an inherent inaccuracy
(e.g., a few meters for GPS positions). Furthermore,
each technology has its own specifications and
limitations, creating some technical restrictions
during the construction of an IoT device (Henricksen,
2004).
In this way, this paper presents the
implementation of an IoT device that has the ability
to inform how many persons there are in a room. This
information can be useful in a variety of scenarios: to
control the room temperature; to alert if the number
of persons exceeds the supported by the site; to send
information about trespassing; to count how many
persons are using public places, in addition to several
others.
Since imperfect or incomplete data may hinder the
proper functioning of an IoT-based system, the
proposal was implemented using two different
approaches: motion and ultrasonic technology. Those
technologies have been combined with
microcontrollers to create a device capable of
informing, with accuracy, the difference of
individuals entering and exiting a particular room. In
order to find the best alternative for this purpose, all
implementations were evaluated in the aspect of
validity of the information provided.
The remainder of this paper is organized as
follows. Section II presents a brief discussion about
IoT devices and used technologies. The IoT person
Carvalho, B., Silva, C., Silva, A., Buiati, F. and Timóteo, R.
Evaluation of an Arduino-based IoT Person Counter.
DOI: 10.5220/0005954601290136
In Proceedings of the International Conference on Internet of Things and Big Data (IoTBD 2016), pages 129-136
ISBN: 978-989-758-183-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
129

counter implementations are described in section III.
In section IV it is presented a set of experimental
results. Finally, conclusions and discussions of future
work are shown in section V.
2 RELATED CONCEPTS
In this section, we raise some concepts related to IoT
objects, in order to characterize the scenario, which
fits our proposal. First, on section 2.1 is presented
some concepts related to IoT devices. Next section,
describes concepts on microcontrollers and Arduinos.
Sections 2.3, 2.4 and 2.5 clarify the concepts related
to motion and ultrasonic technologies, respectively.
2.1 IoT Devices
The increasing number of smart devices, ranging
from computers to simple domestic appliances,
together with the ease of access to the internet,
brought up the notion of Internet of Things
(IoT). There are several ways to define IoT, but the
essence of the concept is the device interconnection.
IoT can be defined as a global network infrastructure
where physical devices, with a unique identity and a
virtual representation, have the ability to
communicate with other devices and distributed
architectures, like clusters, grids and clouds (Manna,
2014). Besides the communication with each other,
IoT devices are able to access information on the
internet, to retrieve and manipulate data and to
interact with users. Thus, it is possible to increasingly
observe the fusion of the physical and digital world.
In a typical IoT structure there are different types
of sensors, such as temperature, motion, humidity,
RFID, used to obtain specific data about the
environment. These sensors are connected with
embedded devices that collect and process the data
provided by the sensors (Toma, 2014).
2.2 Microcontroller
Primarily, it was called a microcomputer due to the
fact that includes built-in RAM, ROM, and I/O
(Gridling, 2006).
Differently from microprocessors, the objective in
developing microcontrollers was to create a complete
computer in a single chip with memory, peripherals
components and a processor that can be used as an
embedded system (Sickle, 2001). Nowadays, there
are embedded systems that require a minimal of
memory and processing, while others are extremely
sophisticated.
2.2.1 Arduino
Arduino is an open-source prototyping platform
composed by a microcontroller or physical
programmable circuit board and a software or IDE
that runs in a computer. The Arduino boards interacts
with the environment through peripheral components,
like electronic sensors, lights, and motors. Then,
using the Arduino programming language and the
Arduino Software (IDE), it is possible to manipulate
data captured (W. Arduino, 2016).
Nowadays, there are several different types of
controllers on Arduino platform, which differ mostly
on IO pins and version of flash memory (Raspaile,
2013). The most important ones are Arduino Uno,
Arduino Mega2560, Arduino Nano, Arduino Mini,
Arduino Due, Arduino Leonardo and Arduino ADK.
2.3 Motion Sensor
A motion sensor is a device used to detect movements
in a certain area and it can use multiple types of
technologies to perform this task, which defines
aspects such as range, precision and sensitivity
(M.Sensor, 2016). There are two main types of
motion sensors:
• Passive sensor: it detects variations in energy in
the surrounding area, but it does not emity
energy.
• Active sensor: it transmits infrared light,
microwave radiation, or sound waves and waits
for its response. Due to continuous activity, this
type of sensor consumes a significantly larger
amount of energy.
There are several applications for motion sensors.
The most common are: security systems, to open and
close automatic doors and to turn on lights when a
person enters a room.
2.4 Ultrasonic Sensor
The operation of an ultrasonic sensor is based on the
transmission of ultrasonic pulses and the time
response of the pulses. In this way, the principle
underlying this technology is that speed of sound in
air is approximately constant (Wijk, 1998). Thus,
estimating the time for pulse reflection allows
knowing the distance to the object due to the
proportionality relation. Therefore, ultrasonic sensors
are used frequently to detect objects and for distance
measurement applications.
These sensors are capable of detecting any type of
object that have sufficient acoustic reflectivity. On
IoTBD 2016 - International Conference on Internet of Things and Big Data
130
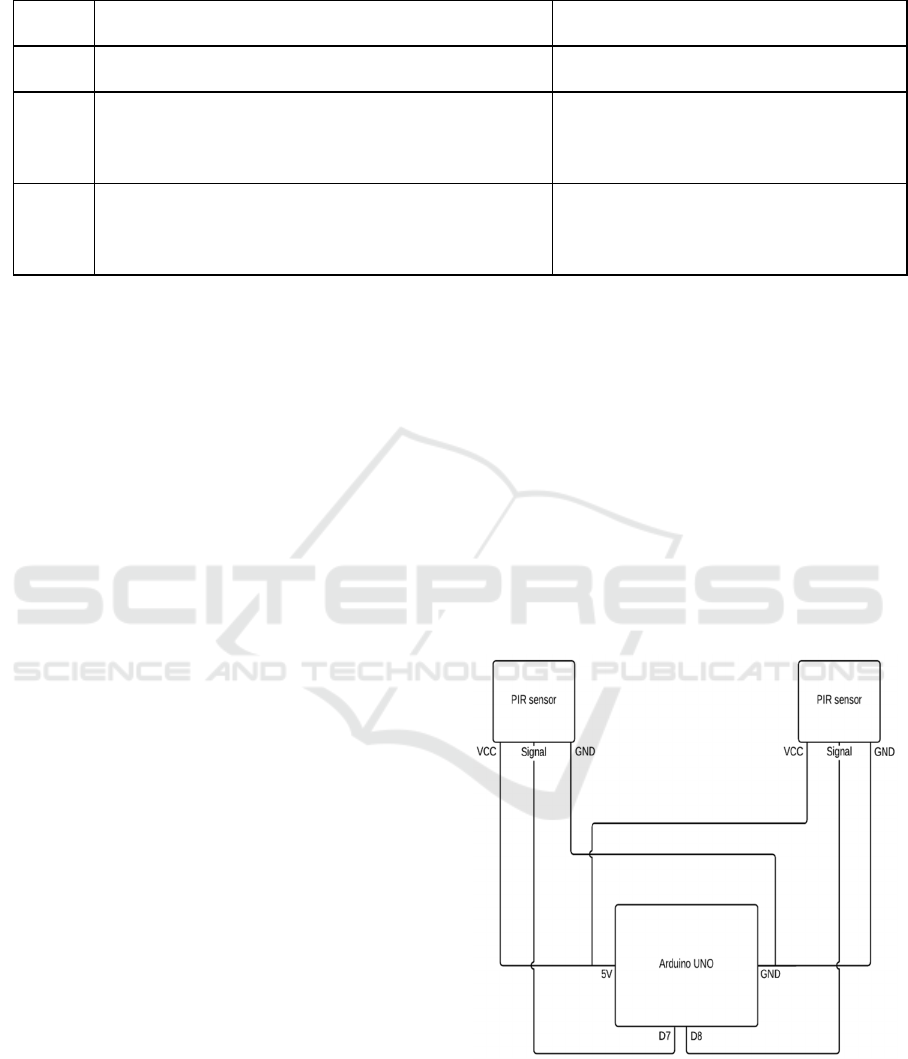
Table 1: Person counter REST request.
Method
Request Description
PUT http://server-ip/service?serv_name=A&dev_id=B&info=C
Generic request
PUT http://172.2.2.10/service?serv_name=count&dev_id=5&pc=5
Example of a request where the device id
is 5, the number of people in the room is 5,
and service name is count
PUT http://172.2.2.10/service?serv_name=count&dev_id=1&pc=9
Example of a request where the device id
is 1, the number of people in the room is 9,
and service name is count
the other hand, sound absorbing material, such as
cloth and foam, are not easily identified.
3 IoT PERSON COUNTER
In this section are presented the proposed IoT person
counters. Such devices have the ability to inform how
many people are present in the environment in which
they are installed. The IoT person counter takes
advantage of well-established technologies, for
example ultrasonic, to perform the counting of
individuals transiting in a certain place.
It is noteworthy that all these devices communicate
with a central server through a REST interface (Silva,
2016), informing their unique identification (dev_id),
the service name (serv_name) and the people count
information (pc). The data is sent via Wi-Fi technology
using an Arduino Wi-Fi shield (A.WiFi, 2016). Table
1 presents the generic structure for REST, as well,
examples of the requests performed by the IoT devices.
The proposal presentation is divided into two
subsections. First, it is presented the IoT person
counter based on motion sensor technology. Next
subsection, presents an implementation using
ultrasonic sensors. All subsections presents a circuit
schematic, an algorithm that performs the counting
process and the specification of technologies used to
build the devices. It also elucidates the limitations of
each technology and their impact on the capture of
environmental data.
3.1 Motion Approach
The motion approach for an IoT person counter was
designed with a microcontroller and two motion
sensors. The microcontroller verifies which sensor
was activated and waits for the activation of the other
sensor. If both were activated in a given time interval,
it is identified that a person has passed in front of the
device. The prototype of this device was built with an
Arduino Uno (A.Uno, 2016) and two motion sensors
model DYP-ME003 (Motion, 2011).
3.1.1 Circuit Schema
The circuit schema of the motion person counter is
presented on Figure 1. This circuit is composed by
two PIR sensors (motion sensor) connected with one
Arduino Uno. The power of these sensors (VCC) is
supplied by the 5V Arduino pin. The ground (GND)
of each sensor is attached in the GND Arduino pin,
the signal output of the first sensor is connected at the
digital pin 7 and the signal of the second one at digital
pin 8.
Figure 1: Motion person counter circuit schema.
In its default state, the motion sensor sends
through the signal pin a LOW (0) output, meaning
that there is no movement. When the PIR sensor
detects motion, the signal output is HIGH (1) on the
correspondent Arduino digital pin. The combine of
Evaluation of an Arduino-based IoT Person Counter
131

two of these sensors allows four different states: two
sensors on 0, one sensor on 1 and another on 0 or two
sensors on 1. When the two sensors are HIGH, can be
detected that a person passed in front of the sensors.
3.1.2 Algorithm
The motion approach algorithm is presented in
Algorithm 1. The implementation defines a procedure
named read_opposite_sensor(byte, bool, int), and
other named main. The read_apposite_sensor
receives as parameter: a byte, which indicates the
sensor_id, a boolean value that gives the direction in
which the person is passing and an int value that
represents the time interval when the sensor has to be
read.
This procedure performs the reading of the
opposite sensor during the time interval max_time, if
it recognizes any motion, then it detected passage of
an individual. Depending on the direction, the
procedure can add or subtract the value in the persons
counter.
The main procedure is executed while the device
is on and checks if any motion was detected in any of
the sensors. In the case of motion detection,
read_opposite_sensor function is called to see if
anyone passed in front of the other sensor. It is
important to notice that this implementation does not
use external libraries, just Arduino pre-defined
functions.
Algorithm 1: Motion person counter
procedure read_opposite_sensor(byte
sensor, bool direction, int max_time) :
void
int time = 0;
while(millis() - time <
max_time)
if(is_high(sensor) &&
direction)
number_of_people++;
else if(is_high(sensor) &&
!direction)
number_of_people--;
end while
time - millis();
end procedure
procedure main() : void
int number_of_people = 0;
while(device_on)
if(sensor_is_high(first))
read_oposite_sensor(second, 1);
else
if(sensor_is_high(second))
read_oposite_sensor
(first,0);
end while
end procedure
The motion sensors used on this implementation have
some technical restrictions that should be taken into
account as they directly impact in the device
implementation: The sensor stands in HIGH for 2.5
seconds: When the DYP-ME003 sensor detects
motion, it stands in high for approximately 2.5
seconds. In this time interval, the sensor is
incapacitated to perform data capture. This limitation
undermines the counting process, if people pass in a
time interval shorter than 2.5 seconds. Besides that,
only one person can pass in front of the device, if a
group of people pass, the device will recognize as just
one person.
3.2 Ultrasonic Approach
The ultrasonic IoT person counter was built with one
microcontroller and two ultrasonic sensors. This
device performs its functionality similarly to the
motion device. The difference consists on the
information provided by the sensor. The ultrasonic
device informs the distance of an object that is ahead
of it.
Therefore, the device checks at what distance an
object is from the sensor and waits until the other
sensor recognizes the object in the same distance
interval. In this case, it is recognized that someone has
passed in front of the device. The prototype of this
device was built with an Arduino Uno (A.Uno, 2016)
and two ultrasonic sensors model HC-SR04
(Ultrasonic, 2011).
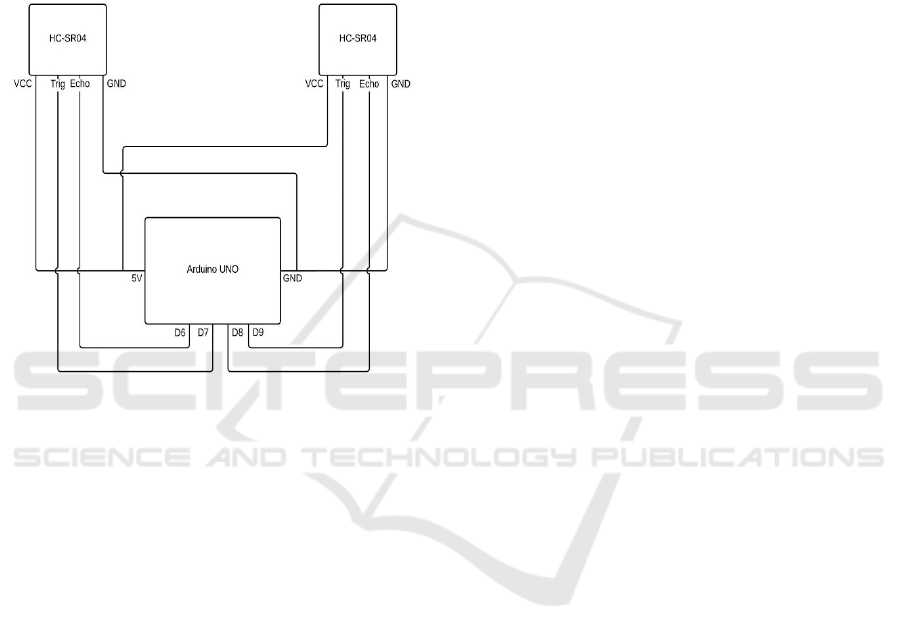
3.2.1 Circuit Schema
The ultrasonic circuit schema is shown in figure 2. An
Arduino UNO is responsible for collecting the
information captured by the ultrasonic sensors. This
circuit has two HC-SR04 sensors (ultrasonic sensor)
connected with one Arduino Uno. The VCC is
supplied by the 5V Arduino pin and the GND of each
sensor is attached in the GND Arduino pin. Each
sensor has one Trigger and Echo pin. The first sensor
has Arduino digital pin 7 and 6 connected,
respectively, to Trigger and Echo. Besides that, the
second one is attached with digital pin 9 on Trigger
and digital pin 8 on Echo.
The ultrasonic sensor constantly measures the
distance of objects ahead, sending a signal through
Trigger pin e receiving through Echo. When it is first
turned on, the device measures the distance of all
stationary objects in the environment. In this paper,
IoTBD 2016 - International Conference on Internet of Things and Big Data
132
this distance will be called environment distance.
Besides that, when a person passes in front of the
device, the distance measured will be named person
distance.
The combining of these two sensors heads to four
different states: two sensors reading the environment
distance, one reading environment and the other a
person distance, and the two sensors detecting a
person distance. When two devices read a person
distance, that means someone passed in front of it.
Figure 2: Ultrasonic person counter circuit schema.
3.2.2 Algorithm
To perform people counting process the algorithm
presented in Algorithm 2 was deployed in the circuit.
It use two procedures and one library to compute the
information. The library is called “ultrasonic.h” (),
and it is used to perform two types of processing:
• timing(): Gives the time passed between the
emission and reception of an ultrasonic wave.
• convert(bool, int): receives the sensor id (in this
case a boolean value), and the precision wanted
(in this case centimeters).
The library was adapted to work with boolean
values as a sensor id. Besides that, two procedures
were implemented; read_ultrasonic_distance(bool)
and count_persons(float,float,bool). The first one
uses the library functions to return the distance that an
object is from the sensor. The count_persons
procedure counts the number of persons who passed
in front of one sensor.
The main procedure uses the following pre-
configured information: delay, min_dist and
max_dist. Delay indicates the time when the
microcontroller has to switch the direction of reading.
For example, if the delay time is set to 200
milliseconds, the device will verify how many
persons are entering the room for 200ms, then it will
verify how many persons are exiting the room for
200ms. The min_dist and max_dist represents the
distance range, this interval indicates the size (width)
of the corridor where people can pass.
Therefore, the algorithm is executed while the
device is on, and checks if anybody has passed in any
direction. If so, this amount is incremented or
decremented from the people global counter. In each
iteration the direction is changed so the device can
read in both directions. To finish the procedure the
device sends to the server the captured information,
through the rest interface, in order to preserve a
historical ballast.
Algorithm 2: Ultrasonic Persons Counter
procedure read_ultrasonic_distance(bool
direction) : float distance
microsec = ultrasonic.timing();
distance =
ultrasonic.convert(direction,
Ultrasonic::CM);
return distance;
end procedure
procedure count_persons(float
min_distance, float max_distance, bool
direction): int amount_people
float distance_dir = 0;
float distance_oposite_dir = 0;
number_of_people = 0;
do
distance_dir =
read_ultrasonic_distance(direction);
distance_oposite_dir =
read_ultrasonic_distance(!direct
ion);
if(same_distance_range(dis
tance_dir,
distance_oposite_dir))
number_of_people++;
while(distance > min_distance &&
distance < max_distance)
return number_of_people;
end procedure
procedure main() : void
float delay = 200;
int max_dist = 100; //centimeters
int min_dist = 40; //centimeters
int direction = 1;
amount_of_people = 0;
Evaluation of an Arduino-based IoT Person Counter
133

while(device_on)
while(time < delay)
if(direction)
amount_of_people +=
count_persons(min_dist,
max_dist,direction);
else
amount_of_people -=
count_persons(min_dist,
max_dist,direction);
end while
end while
direction = !direction;
send_to_server(amount_of_people);
end procedure
The ultrasonic counter has limitations related to
the distance that the object is from the device. In other
words, if someone passes in front of the device at a
distance greater than one meter it usually loses
precision.
In addition to that, if there is a group of people
passing in front of the device, in the same distance
range, it is possible that the proposed device also
loses accuracy. Even with those limitations, for
counting a large numbers of people the ultrasonic
approach was more consistent than motion
technology based approach.
4 EXPERIMENTAL RESULTS
4.1 Experimental Environment
In order to compare the proposed solutions in a real
scenario, all IoT person counters were installed in the
same laboratory room. The devices were deployed
next to the door, objectifying only to capture data
related to the entry and exit of people. This room is
used by fifteen distinct persons at different times of
day.
The proposed implementations were analyzed in
relation of the accuracy of the information provided
by the IoT devices. Experiments were conducted in
the following approach:
• Controlled tests: Devices were tested in specific
scenarios with minimum external interference.
These scenarios can be seen in Figures 3,4,
5,6,7,8 and 9.
The scenarios proposed for the execution of controlled
tests were designed in order to analyse the
effectiveness of implementations in different
situations. Thus, the scenarios differ in number of
people, time interval between the passage of persons
and direction of passage, in other words, entering or
leaving.
Figure 3: Scenario 1 - One person entering or leaving the
room.
Figure 4: Scenario 2 - One person entering and other person
leaving the room at the same time.
Figure 5: Scenario 3 - Two persons entering or leaving the
room at the same time.
Figure 6: Scenario 4 - Two persons entering or leaving the
room in a short time interval.
IoTBD 2016 - International Conference on Internet of Things and Big Data
134

Figure 7: Scenario 5 - One person entering and other person
leaving the room in a short time interval.
Figure 8: Scenario 6 - A group of N people entering and
another group of M people leaving the room in a short time
interval.
Figure 9: Scenario 7 - A group of N people entering and
another group of M people leaving the room, all at the same
time.
Table 2 presents the result of accuracy evaluation
for all controlled tests. Each row represent a specific
scenario evaluated by motion and ultrassonic
approaches.
For scenarios where only one individual passes in
front of the device, in a controlled time frequency, the
devices obtained results next to those expected,
indicating that they can be used in real environments.
Both motion and ultrasonic technologies have a
inactivation time range limitation, respectively, of 2,5
seconds and 500 milliseconds.
The experimental results also indicate that in
scenarios with heavy human traffic both
implementations have an undermining accuracy.
Besides that, in scenarios where there are several
persons passing at the same time the two approaches
recognize as one individual.
Table 2: Accuracy of proposed implementations.
Scenario
Accuracy Result:
Ultrasonic
Accuracy Result:
Motion
1 90% 81%
2 0% 0%
3 0% 0%
4 87% 50.3%
5 63.2% 49.8%
6 58.7% 12.4%
7 0% 0%
5 CONCLUSIONS AND FUTURE
WORK
The research work presented in this paper proposes a
IoT person counter implemented with two different
technologies, motion and ultrasonic. The information
provided by person counter device can be used in
several scenarios, such as to ensure security of access
to a room, or to regulate the temperature of a room.
Algorithms have been suggested to carry out the
management of the information provided by the
sensors. As result of the proposal, experiments
indicate that in controlled environments, where there
are not many people transiting, both approaches have
a considerable accuracy. In contrast, scenarios in
which the flux of people is significant, both
applications have an impoverishment of its accuracy.
Given this scenario, where devices are
susceptible to imprecision of the information
captured from the environment, it is understood that
it is not possible to send information, continuously
and accurately, over a given situation occurring in the
environment, with only one IoT device. In this sense,
for future work it is proposed an IoT network person
counter (INPC). The INPC utilizes information
provided by different devices on the network to infer
how many people are in a certain place. Such
implementation will take advantage of information
provided by an IoT authenticator (based on RFID
technology), an IoT person counter (based on motion
technology), and an IoT face recognizer (based on
face recognition algorithms). Those three devices will
send information to the network and all the
information combined tends to indicate with a
Evaluation of an Arduino-based IoT Person Counter
135

better accuracy and precision the amount of the
number of people in a certain place.
ACKNOWLEDGEMENTS
The authors wish to thank the Brazilian research,
development and innovation Agencies CAPES
(Grant FORTE 23038.007604/2014-69),FINEP
(Grant RENASIC/PROTO 01.12.0555.00) and
PNPD/CAPES - Programa Nacional de Pos-
Doutorado/CAPES for their support to this work.
REFERENCES
A.Uno, Arduino Uno datasheet. On-line reference acessed
in 19/02/2016. https://www.arduino.cc/en/Main/
ArduinoBoardUno
A.WiFi, Arduino WiFi shield datasheet. On-line reference
acessed in 17/02/2016. https://www.arduino.cc/en/
Main/ArduinoWiFiShield
Gridling G., Weiss B. (2006). Introduction to
Microcontrollers. Vienna University of Technology.
Henricksen, K., Indulska, J. (2004). “Modelling and using
imperfect context information,” in Pervasive Computing
and Communications Workshops. Proceedings of the
Second IEEE Annual Conference on. IEEE, 2004, pp.
33–37.
Manna, S., Bhunia, S.S., Mukherjee, N. (2014). Vehicular
Pollution Monitoring Using IoT. IEEE International
Conference on Recent Advances and Innovations in
Enineering.
Motion sensor: spcification of DYP-ME003. On-line
reference acessed in
19/02/2016. http://elecfreaks.com/ store/download/
datasheet/sensor/DYP-ME003/ Specification.pdf
M. Sensor, The Beginner’s Guide to Motion Sensors. On-
line reference acessed in 23/02/2016. http://www.
safewise.com/resources/motion-sensor-guide
Raspaile, P., Keswani, V. (2013). An Approach Towards
Low Cost Wireless Sensor Network for the
Applications of IoT. International Journal of
Engineering Science and Advanced Technology.
Sickle, T. V. (2001). Programming Microcontrollers in C.
LLH Technology Publishing, Eagle Rock.
Silva, C. C .M., Ferreira, H. G. C., Sousa Júnior, R. T.,
Buiati, F. and Villalba, L.J.G, 2016. Design and
Evaluation of a Services Interface for the Internet of
Things. Wireless Personal Communications. p. 1-38.
Springer.
Toma, C., Popa, M. (2014). Internet of Thing Architecture
for Context Aware Sensors Data Processing in Waste
Management Solution. Journal od Mobile, Embedded
and Distributed Systems, vol. VI.
Ultrasonic sensor: specification of HC-SR04. On-line
reference acessed in 19/02/2016.
http://www.elecfreaks. com/store/download/product/
Sensor/HC-SR04/HC-SR04_Ultrasonic_Module_
User_Guide.pdf
Wijk, O., Jensfelt, P., Christensen, H.I., (1998).
Triangulation based fusion of ultrasonic sensor data.
IEEE International Conference on Robotic and
Automation.
W.Arduino, What is Arduino. On-line reference acessed in
19/02/2016. https://www.arduino.cc/en/Guide/
Introduction
IoTBD 2016 - International Conference on Internet of Things and Big Data
136
