
A Novel Implementation Approach for Resource Holons in
Reconfigurable Product Manufacturing Cell
Ahmed R. Sadik
1,2
and Bodo Urban
1,2
1
University of Rostock, Universitätsplatz 1, 18055, Rostock, Germany
2
Fraunhofer Institute for Computer Graphic Research IGD, Joachim-Jungius-Str. 11, 18059, Rostock, Germany
Keywords: Holonic Control Architecture, Reconfigurable Manufacturing System, Human-Robot Cooperation Planning,
Autonoumos Multi-Agent System, IEC 61499 Model.
Abstract: Holonic Control Architecture is a successful solution model for reconfigurable manufacturing problems. Two
well-known different technologies have been used separately to implement the holonic control model. The
first technology is IEC 61499 standard, and the second is autonomous reactive agent. Both of the previous
mentioned technologies have its own pros and cons. Therefore this research is merging the two technologies
together in one solution body, to magnifying their pros and reduce their cons. Ultimately; it provides a novel
implementation model for the manufacturing holons, to be followed in similar reconfigurable manufacturing
problems. A human worker in cooperation with a safe industrial robot, has been selected as a case study of a
reconfigurable manufacturing problem. The proposed holonic control solution has been applied to the case
study, to evaluate the ability of the solution to satisfy the requirements of the case study. The results show the
ability of the proposed control solution to provide a flexible physical and logical interaction framework, which
can be scaled over more workers in cooperation with more industrial robots.
1 INTRODUCTION
Reconfigurable Manufacturing System (RMS) is a
system where production components and functions
can be modified, rearranged and/or interchanged in a
timely and cost-effective manner to quickly respond
to production requirements (Koren, 1999). The
concept of RMS has been formed in response to the
fast continuous changes in the market requirements.
The goal of the RMS is to reduce the lead time when
the production switches from one product to another,
moreover to reliably handle the fluctuation in the
production volume (Kruger, 2015). A Reconfigurable
Manufacturing Cell (RMC) is the elementary unit of
an RMS. An RMC should be able to produce different
customized products, this can be achieved if the RMC
control system understands the product task plan (i.e.
recipe), and the capabilities of the work resources (i.e.
machines, robots, workers). Then it matches the
product task plan to the capabilities of the work
resources.
A Holonic Control Architecture (HCA) is an agile
solution for RMS problems (Chirn, 2000). The
solution provides a distributed control model which
defines the hierarchy, structure, and functions of all
the elements in a manufacturing system. HCA is
based on the autonomy concept. Autonomy is the
ability of the system to act without a direct
intervention from humans, as it should have control
over its own actions and internal state (Anumba,
2005). Many different autonomous technologies can
be used to implement the HCA model. Most of the
researchers who implement the HCA model, either
use autonomous agent specifications (Wang, 2005) or
IEC 61499 standard (Vlad, 2010). During this
research both the technologies will be highlighted.
Then they will be combined together to get the best
possible solution, to implement an HCA model to
control an RMC. A safe industrial robot in flexible
cooperation with a human worker is a novel case
study of an RMC, the proposed HCA solution will be
tested on this case study to show the solution
viability.
This paper is structured as follows. Section 2
explains the main concepts and technologies that will
be utilized during this research, such as HCA,
autonomous agent technology, and IEC 61499
standard. Section 3 is a review for the most related
work. Thus it is easier for the reader to understand the
problem formulation in section 4. Section 5
130
Sadik, A. and Urban, B.
A Novel Implementation Approach for Resource Holons in Reconfigurable Product Manufacturing Cell.
DOI: 10.5220/0005956801300139
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 1, pages 130-139
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
introduces an RMC case study and the proposed
solution structure, which is tested and evaluated in
section 6. Finally section 7 wraps up the work
summary with the conclusion and the future research.
2 PRELIMINARY CONCEPTS
2.1 Holonic Control Architecture
Figure 1: Holon General Architecture.
In the late of sixties, the term holon has been
introduced for the first time by philosopher Koestler
(Koestler, 1967). Koestler developed the term as a
basic unit in his explanation for the evolution of
biological and social structures. Based on his
observations that organisms (e.g., biological cells) are
autonomous self-reliance units, which have a certain
degree of independent control of their actions, yet
they still subject to higher level control instructions.
His conclusion is that any organism is a whole
“holos” and a part “on” in the same time, which
derived the term holon (Giret, 2008). The concept of
holon has been adopted in the early of nineties by the
Intelligent Manufacturing Systems (IMS)
consortium, to define a new paradigm for the factory
of the future. IMS defined the holon as an
autonomous cooperative building block of the
manufacturing system, that can be used to transform,
transporting, store and/or validate the information and
the physical objects (Radu and Frank, 2006).
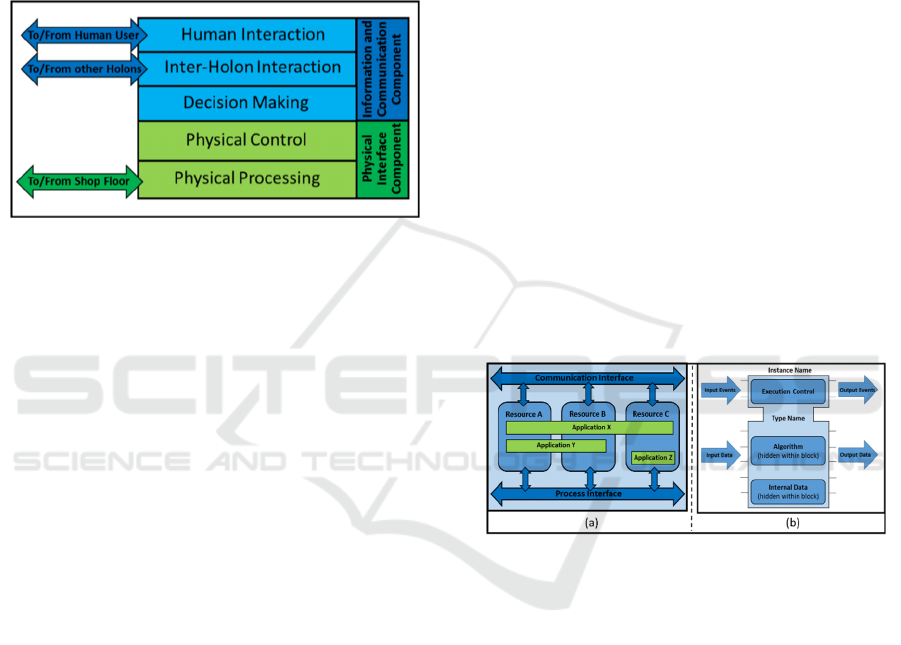
The generic structure of the holon has been
constructed as shown in Figure 1 (Bussmann, 1998).
A holon is mainly composed of two components. First
the physical interface component, this is the
component which physically connects the holon to
the automation devices input/output (I/O) on the
factory shop floor. The holon physical component is
responsible for controlling the data transfer from the
automation devices to the holon and vice-versa.
Furthermore it translates these data into useful
information which can be processed by the holon. The
second holon component is the information and
communication component, this component contains
the holon kernel. As it is responsible for
communicating with other holons in the HCA, and
interacting with the humans in the manufacturing
system. All the information gathered from the other
holons, the humans, and the automation devices are
processed by the holon decision making algorithm, to
produce a proper action based on the function of this
holon in the HCA.
The functions and the responsibilities of each
holon, depend on the category of this holon. Product-
Resource-Order Staff Architecture (PROSA) (Van
Brussel, 2003), and ADAptive holonic COntrol
aRchitecture (ADCOR) (Leitao, 2006) are the most
popular HCA models. Regardless the difference
between the two models, they are addressing four
holon catagories which are: resource holon, product
holon, task holon, and supervisory holon (Su, 2007).
However our concern in this research will focus on
the resource holons. The resource holon is a physical
entity within the manufacturing system, it can
represent a robot, conveyor, machine, etc.
2.2 IEC 61499 Function Block
Standard
Figure 2: (a) IEC 61499 Distributability – (b) IEC 61499
Function Block.
IEC 61499 standard is an implementation model for
distributed control systems on embedded devices,
which extends the capabilities of IEC 1131-3
standard. It defines a reference model for
development, reusing and deployment of Function
Blocks (FBs) in distributed embedded industrial
control (Fischer, 2010). Figure 2-a illustrates the
distributability of IEC 61499. The automation devices
share the control of different applications
simultaneously. IEC 61499 power of distributability
originates from using the FB as a main building unit.
Figure 2-b shows the structure of an FB, The FB
consists of three fields: events I/O, data I/O, and an
internal algorithm. An FB does not apply scanning
cycle technique. Therefore different algorithms can
run simultaneously on the same FB. An algorithm
will be triggered on arrival of an input event, the
A Novel Implementation Approach for Resource Holons in Reconfigurable Product Manufacturing Cell
131
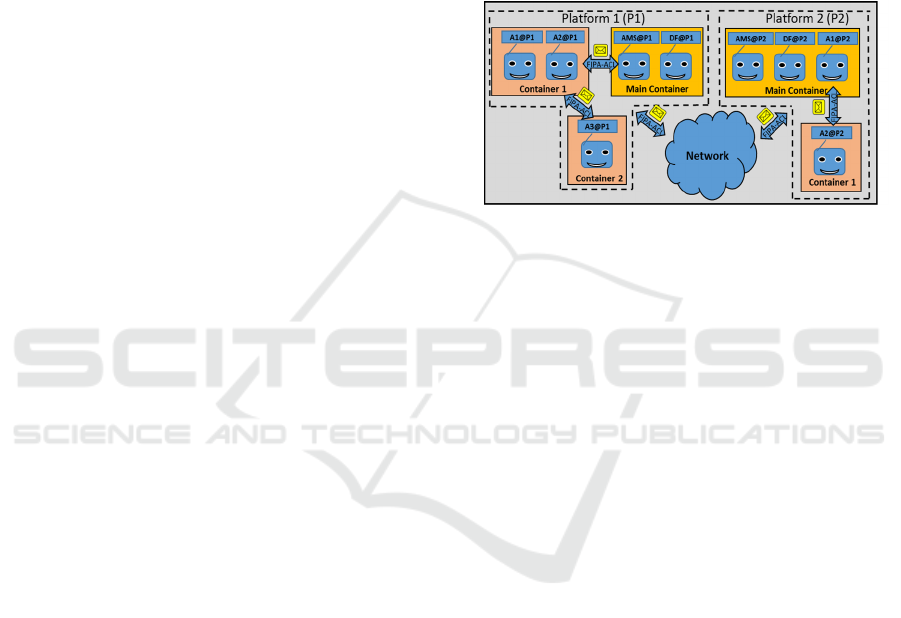
algorithm is processing the input data to produce
output data and output events (Pang, 2014).
FB technique does not only empower the
customizability and the distributability concepts. But
also it supports other concepts such as: reusability,
modularity, extensibility, and diagnosability.
Reusability points to the capability of the software
components to be reused over different
manufacturing demands and configurations. While
modularity is the degree of those software
components to be separated and recombined
(Sturgeon, 2002). Extensibility is another
synonymous of “plug and play” concept, it can
express the ability of the system to be extended to
intra/inter enterprise level by including or integrating
with more manufacturing functions (Su, 2007).
Finally diagnosibility is the ability to automatically
read the current state of a system and controls, so as
to detect and diagnose the operational defects, and
subsequently correct them quickly (Koren, 2005).
Many software tools are using IEC 61499 as a
reference control architecture. Examples of those
tools are FBDK, ISaGRAF, 4DIAC, nxtStudio. Those
tools differ in minor variations, such as the
programming language they build in. This research is
using Function Block Development Kit (FBDK) as
part of the implementation and testing phase. FBDK
is not only an IEC 61499 development tool, but also
it can be used to emulate the manufacturing system
before the deployment phase. Manufacturing system
emulation is a real time simulation, which refers to
the ability of the logical model to identically imitate
the time responses and behaviours of the real physical
manufacturing system, to gain insight into it, before
the actual implementation (Peters, 1996).
2.3 Autonomous Agent Technology
A software agent is a computer system situated in a
specific environment; that is capable of autonomous
actions in this environment in order to meet its design
objective (Jennings, 1998). An agent is responsive,
proactive and social. Responsive means the agent can
perceive its environment and respond in a timely
fashion to the changes occurring in it. Proactive
means the agent is able to exhibit opportunistic, goal
directed behaviour and take initiative. Social means
the agent can interact with other artificial agents or
humans within its environment in order to solve a
problem. A Multi-Agent System (MAS) is a
collective system composed of a group of artificial
agents, teaming together in a flexible distributed
topology, to solve a problem beyond the capabilities
of a single agent (Shen, 2006). An agent can be
designed based on a reactive or cognitive model.
Reactive agents have knowledge compiled from the
actions to be carried out. They do not need to
construct a mental representation of their
environment, since it is merely sufficient for them to
react to the situations (Wooldridge, 1995). On the
other hand cognitive agents have reasoning capacity
based on their environment representation. They are
capable of memorizing situations, and analysing
them. To foresee possible reactions to their actions,
thus they can plan their behaviours (Franklin, 1998).
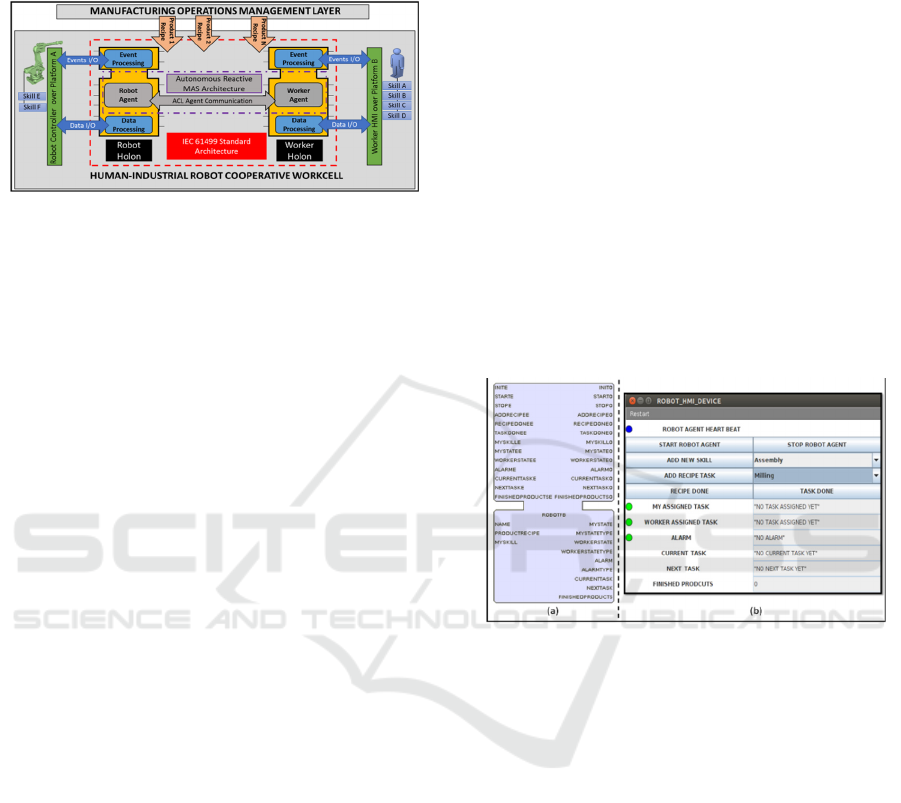
Figure 3: Java Agent Development (JADE) Framework.
JAVA Agent Development (JADE) is a
distributed MAS middleware framework
(Bellifemine, 2007). JADE applies reactive agent
architecture which complies with the Foundation for
Intelligent Physical Agent (FIPA) specifications, and
provides a graphical interface to deploy and debug a
MAS (Italia, n.d.). JADE agents use FIPA-Agent
Communication Language (FIPA-ACL) to exchange
messages either inside its own platform or with
another platform in a distributed MAS. Figure 3
shows a scheme example of JADE (Poslad, 2007).
Each JADE instance is an independent thread
contains a set of Containers. A Container is a group
of JADE agents run under the same JADE runtime
instance. Every platform must contain a Main
Container. A Main Container contains two necessary
agents which are: an Agent Management System
(AMS) and a Directory Facilitator (DF). AMS
provides a unique ID for every agent under its
platform, to be used as an agent communication
address. While the DF announces the services every
agent can offer under its plateform, in order to
facilitate agent service exchange, so that each agent
can obtain its specific goal (Caire, 2009). A JADE
agent can implement one or a group of FIPA standard
behaviours. A behaviour is a set of action/reaction
routines triggered by the agent due to its perception
for its environment (Teahan, 2010).
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
132

3 RELATED WORK REVIEW
The research in (Vlad, 2010) is proposing an IEC
61499 solution for modeling and implementing
holons dynamic interaction. The paper used FBDK
visualization capabilities to emulate the holons
interaction dynamics. The research also is providing
an extensive guidance for designing both the physical
and communication components of a resource holon,
based on a comprehensive explanation of the
responsibilities of each holon category within the
manufacturing system. The holon communication
component has been implemented using FBDK
publish/subscribe technique, which is very static and
primitive communication approach. Therefore the
paper was very successful to emulate the holons
physical dynamics, however it failed to show any
communication interaction. Also the paper did not
apply its described theoretical solution to any
practical case study.
(Kruger, 2013) is evaluating two different
solution approaches. One uses IEC 61499 and the
other uses agent technology. To implement a holonic
control for modular feeder subsystem of an
experimental reconfigurable assembly system (RAS).
The research does not combine the two technologies
together, but it compares them. Then it evaluates
them based on the qualitative and quantitative
performance of four different hardware
configurations of the RAS. The research results state
that agent technology requires less effort and time
than IEC 61499 to implement three configurations of
the RAS. The IEC 61499 has inherent simplicity
because of its visualization capabilities, however the
lacks in IEC 61499 inter-platform communication
flexibility restricted the hardware reconfigurability.
An Intelligent control of an Airport Baggage
Handling System (BHS) has been deeply studied in
(Black, 2008). It provides an extended customized
MAS solution, by modeling every component in the
BHS as an IEC 61499 FB. Basically it is dividing the
whole conveyor transportation system into many
segments. Every conveyor segment is presented as a
customized FB. Moreover it models every bag over
the BHS as another customized autonomous FB. All
the instances of the conveyor segment FB and the bag
FB are communicating together using IEC 61499
standard communication FBs, which made the final
model so crowded and complex. Two important
points are distinguishing this research. First the
reusability of one customized FB to handle all the
instances of the conveyor segments or bags. Second
is the viability of the solution to be practically
applied, as finally it has been implemented on IEC
61499 FB compliant controller produced by TCS-NZ.
4 PROBLEM STATEMENT
The main focus of this paper is to design the resource
holons in an RMS. The resource holons function is to
autonomously adapt to the product changes, therefore
the manufacturing cell is able to continuously
produce the product without stopping. The resource
holon design must meet finite criteria to achieve RMS
concept. Those criteria are: distributability,
customizability, reusability, modularity,
extensibility, scalability and diagnosability. Also the
holon design should achieve the interoperability
concept, this means that the resource holons can
communicate with each other regardless the running
operating system (OS). Finally they should be
capable of handling the shop floor I/Os and
anticipating them to useful information. Most of other
researches tried to design HCA either using IEC
61499 standard or intelligent agent based system.
However each of those solutions has its own
advantages and drawbacks (Vlad, 2010; Kruger,
2013; Black, 2008).
IEC 61499 offers a standard component-based
framework, which promotes the encapsulation
concept. Therefore it can be easily scaled, moduled,
and integrated. Furthermore IEC 61499 is a modeling
language which allows the designer to offline emulate
his solution, before transferring it to the hardware.
This gives The IEC 61499 model very high
diagnosability characteristic comparing to other
distributed control frameworks. However IEC 61499
does not provide an intelligent communication
services, therefore it lacks of a high degree of
adaptability, and this leads to increase the complexity
of the overall solution model. Moreover IEC 61499
model can be customized in offline mode only to
solve one version of a pre-known problem.
On the other hand, agent based system is far
superior to IEC 61499 in information
communication, as it characterized by a high level of
flexibility and low degree of complexity. Agents are
using standard communication languages to enable
them to cooperate, collaborate, or negotiate.
Furthermore an agent based system is using service
oriented architecture (SOA) to announce the services
every agent can offer within its platform. Therefore
adaptability can be easily achieved. Nevertheless an
agent based system can be very sophisticated when it
deals with external physical control events.
In a plain English, the drawbacks of both of the
control models can be compensated by merging them
in a win-win paradigm. The missing gap in IEC
61499 model concerns adaptability, will be imported
from the agent model. Yet the agent system will be
privileged by the superiority of IEC 61499 model to
deal with sophisticated I/O events and data.
A Novel Implementation Approach for Resource Holons in Reconfigurable Product Manufacturing Cell
133
5 CASE STUDY AND SOLUTION
STRUCTURE
Figure 4: Holonic Human and Industrial Robot Cooperative
Production Cell.
Human & Industrial Robot (HIR) cooperative
workcell is a novel trend in industry, which integrates
the human worker along with the industrial robot in
the same working space, therefore they can perform
together a cooperative industrial process (Nilsson,
2005). The idea behind this integration is to combine
the advantages of both the human and the robot in the
same production cell. Workers add the flexibility to
the production cell, as they can easily adapt to many
unexpected situations. Yet industrial robots are
reliable in terms of speed, payload, and accuracy.
Furthermore many industrial robot manufacturers are
supporting this novel trend by producing safe
industrial robots, such as KUKA lightweight, Rethink
Baxter, YuMi ABB dual arm, and Universal Robots
(Lasota, 2014). An HIR cooperative workcell is a
direct application of the RMS. Thus the research will
address it as a case study to apply an HCA solution.
Figure 4 shows the proposed HCA solution on a
single robot – single worker cooperative workcell.
The holon physical interface component
implemented using IEC 61499 FB, while the
communication component implemented as an
autonomous reactive agent. Two different resource
holons have been implemented, a robot holon and a
worker holon. A customized IEC 61499 FB handles
all I/O events and data to/from the robot controller,
another customized FB handles the worker user
interface I/Os. Each FB is embedding a reactive
autonomous agent, the robot agent is communicating
with the worker agent to form a simple MAS. The two
holons are using FIPA-ACL standard protocol for
sending/receiving their interaction messages. Each
holon is dynamically acquiring its resource skills.
Concurrently the robot holon is acquiring the product
recipe. Thus the robot agent is able to negotiate with
the worker agent by following a searching algorithm,
to distribute the product recipe tasks between them.
The product recipe within the context of this case
study refers to, the order of the tasks to produce a
certain product. While a skill refers to the capability
of the work resource to perform a certain task.
For demonstration it has been assumed that the
resources skills are unique, in other words the robot
and worker do not share any similar skill. For the
same reason, we selected a simple case scenario for
one worker in cooperation with one industrial robot,
only to show the applicability of the HCA solution.
The solution approach can be extended to more than
one worker or robot. The same issue with the
searching algorithm, it can be more sophisticated
based on the case study size and requirements.
However the searching algorithm is beyond the paper
goals, we just want to show the ability of the HCA
solution to implement an algorithm, to provide some
of the research goals such as adaptability.
5.1 Holon Physical Component Design
Figure 5: (a) Robot FB – (b) Robot I/O Interface.
FBDK is a pioneer software tool which applies IEC
61499. It is used under the umbrella of this research,
to implement the physical component for the holon.
Figure 5-a&b shows the design of a robot FB and a
running interface of it respectively. INITE event is
meant to initialize the robot FB input data. STARTE
starts an agent in JADE, which holds the NAME input
of the FB, while STOPE vanishes this agent.
ADDRECIPEE event captures a PRODUCTRECIPE
input. One product is composed from many tasks,
which can vary from one product to another. RECIPE
DONE indicates that a complete product recipe has
been defined. TASKDONEE informs the FB that an
assigned task has been accomplished. MYSKILLE is
an event associated with MYSKILL input to capture
the robot skills, considering an industrial robot can
perform more than one task.
MYSTATEE is associated with MYSTATE and
MYSTATETYPE outputs, to constantly display robot
current state (e.g. Busy/Free and robot assigned task).
Similarly WORKERSTATEE is associated with
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
134
WORKERSTATE and WORKERSTATETYPE
outputs, to constantly display worker current state.
ALARME is linked with ALARM and
ALARMTYPE outputs, to occasionally display any
alarm that could occur during the cooperation (e.g.
required skill is not found within the production cell).
CURRENTTASKE and NEXTTASKE are
associated with CURRENTTASK and NEXTTASK
outputs respectively, to display the current task in
execution and the next task needed to be executed.
Finally FINISHEDPRODUCTSE and
FINISHEDPRODUCTS output are linked to display
the number of produced products.
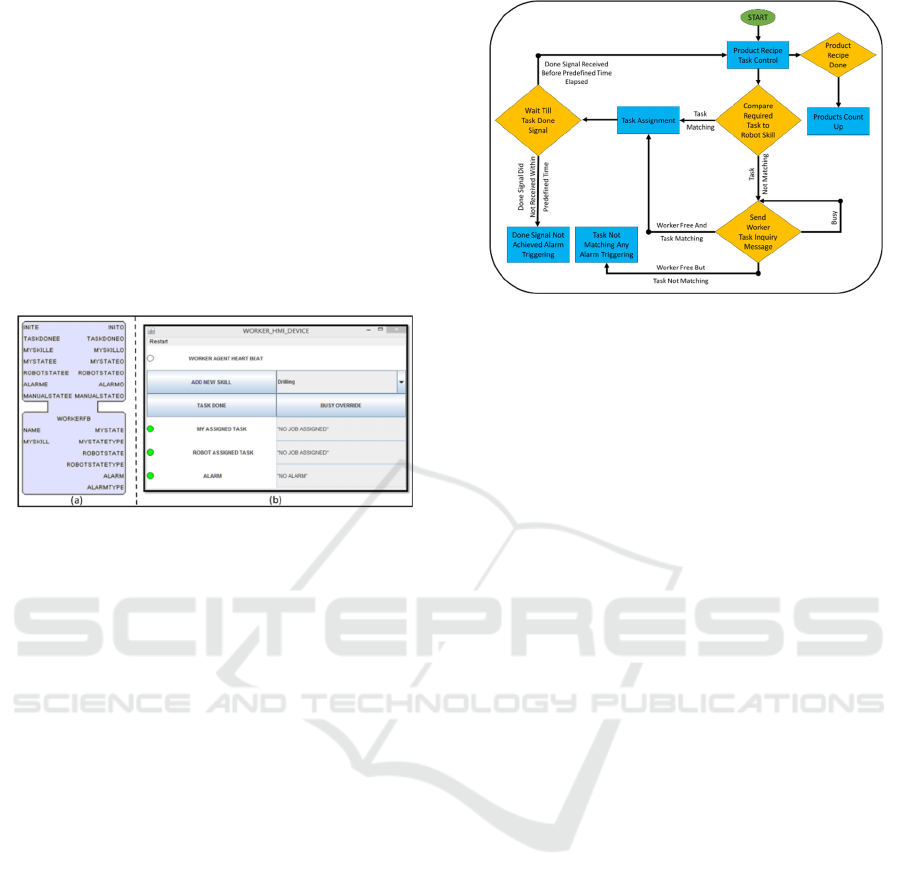
Figure 6: (a) Worker FB – (b) Worker I/O Interface.
Worker FB design and interface are shown in
Figure 6. The difference between the worker and the
robot FB, is that the robot FB defines the product and
the robot I/O parameters together. However the
worker FB concerns only the worker I/Os. One extra
event has been added to the worker FB which is
MANUALSTATEE, to be triggered manually by the
worker if he is busy. Another difference is that the
worker FB has been designed and deployed over
Windows OS, while the robot FB has developed and
deployed over Linux OS, to test/verify the
interoperability of the solution on different OSs.
5.2 Holons Communication Algorithm
A communication algorithm is needed in order to
design the holon communication component. Based
on this communication algorithm, the agent
behaviours can be programmed. Figure 7 illustrates
an algorithm implemented with JADE to manage the
cooperation between an industrial robot and a human
worker, to produce variable recipe product. The
algorithm starts automatically after defining the
product recipe and both of the robot and the worker
skills. In the very beginning it compares the product
first task to the robot skills. If the task matches one of
the robot skills, it assigns this task to the robot,
changes the robot status to be busy, and informs the
worker that this task has been assigned to the robot.
Figure 7: Interaction Algorithm between a Worker and an
Industrial Robot.
In case the robot does not have the required skills
to perform a product recipe task, the algorithm will
send to the worker an inquiry holding the name of the
required skill. If the worker is busy, the message will
be sent periodically until he becomes available. If the
worker is available and the proposed task matches
one of his skills, the task will be assigned to him and
his status will turn to be busy. All the information
about the task and worker status will be sent to the
robot FB. The algorithm will wait for a done signal,
to proceed in the recipe order. If the worker is free but
he does not have the inquired skill, an alarm will be
raised to announce the skill shortage.
A more sophisticated cooperation algorithm has
been intentionally avoided, otherwise it will be so
hard for the reader to see the cooperation test results.
Particularly, we offer a very generic solution, which
can implement different algorithm variations.
6 SOLUTION TESTING
To verify the applicability of the proposed HCA, a
simple cooperation scenario will be emulated, to
show the ability of the solution to achieve the HCA
definition. In this testing scenario we will order a
product using the robot FBDK interface. The product
recipe composes of three tasks, which are in order
Drilling, Milling and Assembly. We will add Drilling
as a robot skill and Milling as a worker skill.
Intentionally we will not add Assembly skill either for
the robot or the worker, to test the system behaviour
in case of a skill shortage. Figure 8 and 9 show the
first task of the product recipe (i.e. Drilling)
assignment process.
A Novel Implementation Approach for Resource Holons in Reconfigurable Product Manufacturing Cell
135
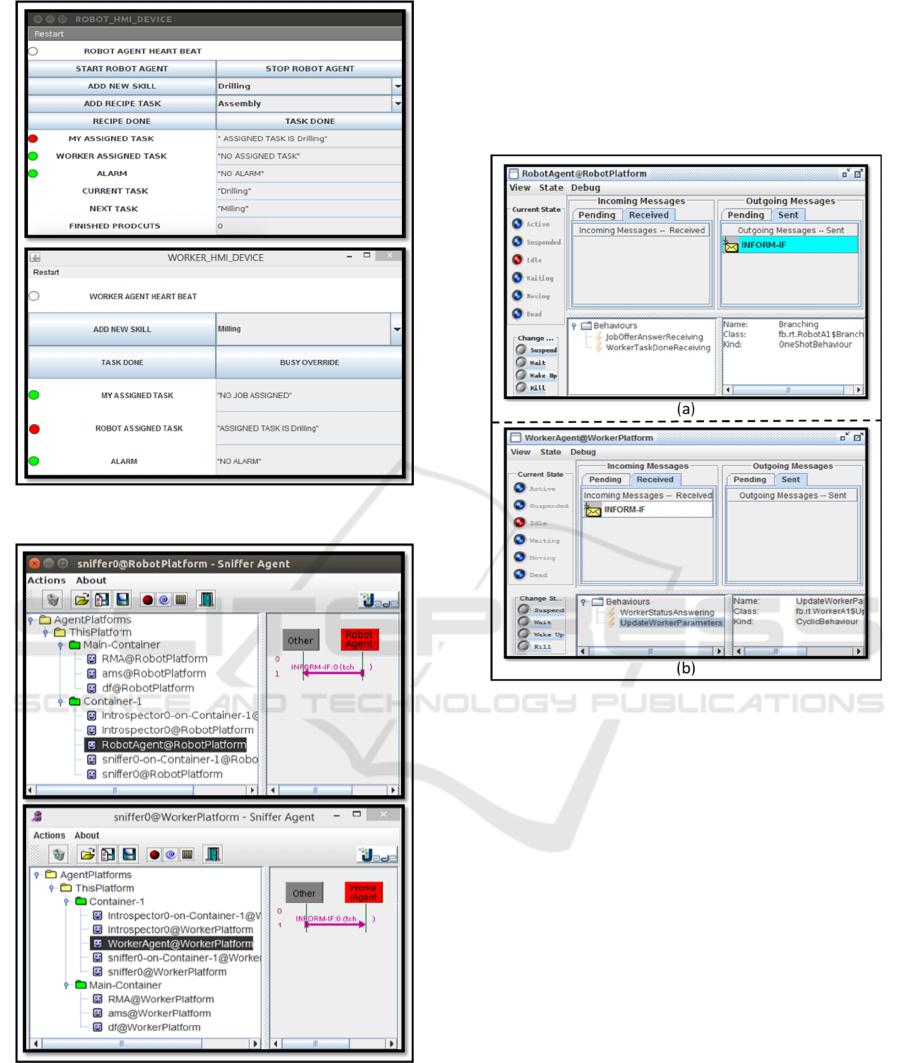
Figure 8: FBDK Interface for Drilling Task Assignment.
Figure 9: JADE Interaction for Drilling Task Assignment.
As been mentioned previously in the cooperative
algorithm, the first step in the cooperation algorithm
is to compare the robot skills with the product recipe
current task. When a Drilling task matches the robot
skills as shown in Figure 8, the MAS assigns the
Drilling task to the robot. Also it changes its status to
be busy, and sends an INFORM-IF message to the
worker, to inform about a task assignment to the
robot. Figure 9 shows the sending/receiving process
between the robot and the worker agents, over two
different OSs. Messages sending/receiving process is
accomplished as part of the agent behaviours.
Figure 10: (a) ACL Message Sent by the Robot Agent – (b)
ACL Message Received by the Worker Agent.
Figure 10-a shows three robot agent behaviours:
Branching, JobOfferAnswerReceiving and
WorkerTaskDoneReceiving. Branching behaviour is
a one shot behaviour which means it is executed once
when called (Ricci, 2011). Branching behaviour
checks if the task matches the robot. If so, it sends an
INFORM-IF message, which is received by the
worker agent using UpdateWorkerParameters cyclic
behaviour showing in Figure 10-b.
A cyclic behaviour is running all the time
periodically. If the task did not match the robot skill,
branching algorithm will offer the task to the worker
agent using QUERY-IF message. The worker agent
will receive QUERY-IF message then answers it with
INFORM-REF using WorkerStatusAnswering cyclic
behaviour. INFORM-REF will be received using
JobOfferAnswerReceiving behaviour on the robot
side. An INFORM message will be sent from the
worker agent to the robot agent, to inform that a task
has been done, WorkerTaskDoneReceiving cyclic
behaviour is responsible for receiving this message.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
136
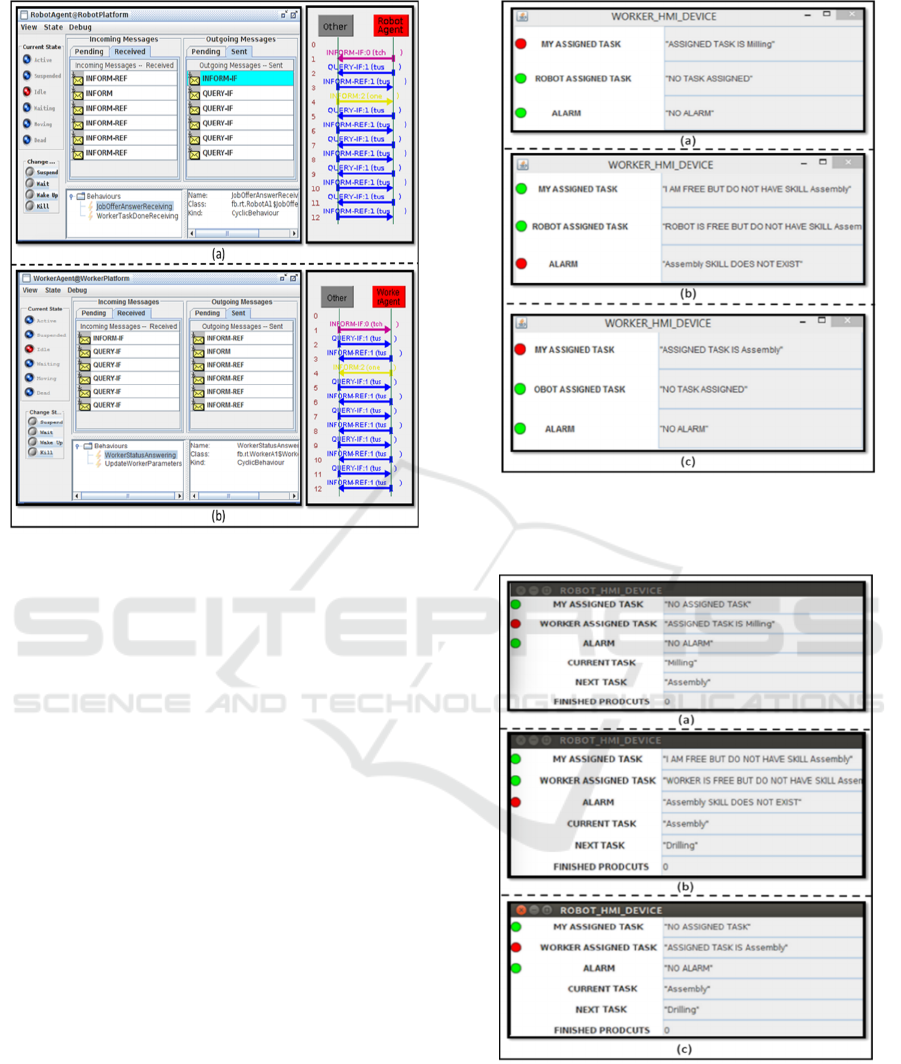
Figure 11: (a) Robot One Product Cycle JADE Interaction
– (b) Worker One Product Cycle JADE Interaction.
Figure 11-a&b show an overall worker-robot
FIPA interaction, to produce one product described in
the testing scenario. The rest of the task assignments
mentioned in the test scenario are shown in Figure 12
and 13. The same previously described mechanism of
message exchanging via agent behaviours is applied.
In Figure 12-a and 13-a; the Milling task matches the
worker skills and did not match the robot skills.
Therefore it is assigned to the worker. In Figure 12-b
and 13-b an Assembly task neither matches the robot
nor the worker skills. Thus an alarm has been
triggered in both the worker and robot FBDK
interfaces. Furthermore the MAS keeps looking for
an Assembly skill, till it is available in the production
cell. Figure 12-c and 13-c show the reaction of the
system when adding an Assembly to the worker
skills, the MAS clears the alarm and assigns the
Assembly task to the worker.
Figure 12: (a) Worker Milling Task Assignment Interface –
(b) Worker Assembly Task Alarm Interface – (c) Worker
Assembly Task Assignment Interface.
Figure 13: (a) Robot Milling Task Assignment Interface –
(b) Robot Assembly Task Alarm Interface – (c) Robot
Assembly Task Assignment Interface.
A Novel Implementation Approach for Resource Holons in Reconfigurable Product Manufacturing Cell
137

7 SUMMARY, CONCLUSION
AND FUTURE WORK
The goal of this research is to design an RMC control
system, which can adapt to a variable product recipe.
A new product can be introduced at any time to the
RMC, thus the work resources can rearrange their
cooperation to produce the product without stopping
the production process. An industrial robot in
cooperation with a human worker has been proposed
as an RMC case study. An HCA with two resource
holons has been chosen as a proper control solution
to be applied to the case study.
The research solution has combined two well-
known control architectures that have been applied
individually in previous researches as a design model
for the HCA. The two architectures are IEC 61499 FB
specifications and autonomous reactive agent
architecture. IEC 61499 FB has been used to build a
customized physical component for the holon. While
reactive agent architecture has been used as an
intelligent communication component. Merging the
two architectures together in one solution, maximized
their pros and minimized their cons. Therefore the
solution successfully achieved the characteristics,
which are highly required to deal with the mentioned
RMC problem.
Modularity, reusability, customizability,
extensibility, and diagnosability are the first set of
characteristics obtained by this solution. Modularity
has been achieved as the robot and the worker holons
have two independent designs, therefore they can
physically and logically separated. Furthermore the
same holons can be reused and extended as an
inherited property from IEC 61499 FB and agent
architectures. Also the holons can be easily
customized to fit more workers or robots into the
interaction, which guarantee the extensibility of the
solution. Diagnosability has been used during the
testing phase, as a part of emulating the control
system. Different combinations of the product recipe
and the worker/robot skills inputs can be tested.
Simultaneously the communication between the
agents can be tracked within every different test.
Platform-independency is one of the most
important results obtained by this solution. As it is
shown in the testing phase, an MAS is formed
between a robot holon running on Linux OS and a
worker holon running on Windows OS. Thus
interoperability, scalability, distributability, and
integrity are no longer a problem during the final
deployment phase. Finally the solution successfully
achieved the adaptability concept during the testing
scenario emulation. The MAS was able to adapt the
existing work resources skills to a variable product
recipe definition, and deal with some unexpected
ambiguous situations such as skill shortage in the
workcell.
Even the tested case study and its applied
algorithm were simple, the required solution
characteristics were completely fulfilled. Therefore
the solution can be a good base model to follow, in
solving more sophisticated interaction scenarios, with
more cooperative work resources. In the future work
more complicated testing case scenarios and
algorithms can be tested and verified.
REFERENCES
Anumba, C. J., Ugwu, O., Ren, Z., 2005, Agents and Multi-
agent Systems In Construction, Taylor & Francis
Group.
Bellifemine, F., Caire, G., Greenwood, D., 2007,
Developing multi-agent systems with JADE. Vol 7 ed.
John Wiley & Sons.
Black, G., Vyatkin, V., 2008, ‘Intelligent Component-
Based Automation of Baggage Handling Systems with
IEC 61499’, IEEE Transactions on Automation Science
and Engineering, Vol 7, pp. 699–709.
Bussmann, S., 1998, An agent-oriented architecture for
holonic manufacturing control, Proceedings of the 1st
international workshop on Intelligent Manufacturing
Systems, pp. 1-12.
Caire, I., 2009, JADE Tutorial: JADE Programming for
Beginners, TILAB & West Sussex.
Chirn, Jin-Lung, C.McFarlane, Duncan, 2000, A holonic
component-based approach to reconfigurable
manufacturing control architecture, 11th International
Workshop on Database and Expert Systems
Applications (DEXA’00), pp. 219-223.
Fischer, J., Boucher, T.O., 2010, Workbook for Designing
Distributed Control Applications using Rockwell
Automation’s HOLOBLOC Prototyping Software,
Working Paper No. 05-017.
Franklin, S., Kelemen, A., McCauley, Lee, 1998, IDA: a
cognitive agent architecture, IEEE Systems, Man, and
Cybernetics, Vol 3, pp. 2646-2651.
Giret, A., Botti, V., 2008. Holonic Manufacturing Systems,
ANEMONA - A Multi-agent Methodology for Holonic
Manufacturing Systems, Springer Series in Advanced
Manufacturing, pp. 7-20.
Italia, T., n.d., jade. [Online] Available at:
http://jade.tilab.com/.
Jennings, N.R., Wooldridge, M.J., 1998, Applications of
intelligent agents, Agent Technology: Foundations,
Applications, and Markets, Springer, pp. 3–28.
Koestler, A., 1967, The Ghost in the Machine, Hutchinson.
Koren, Y., 2005, Reconfigurable Manufacturing and
Beyond, Keynote Paper - CIRP 3rd International
conference on Reconfigurable Manufacturing.
Koren, Y., Heisel, U., Jovane, F., Moriwaki, T., Pritschow,
G., Ulsoy, G., Brussel H., 1999, Reconfigurable
Manufacturing Systems, CIRP Annals, Vol 48, pp. 527-
540.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
138

Kruger, K., Basson, A., 2015, Implementation of an Erlang-
Based Resource Holon for a Holonic Manufacturing
Cell, Studies in Computational Intelligence, Vol 594,
pp. 49-58.
Kruger, K., Basson, A., 2013, Multi-Agent Systems vs IEC
61499 for Holonic Resource Control in Reconfigurable
Systems, Forty Sixth CIRP Conference on
Manufacturing Systems, Vol 7, pp. 503–508.
Lasota A., Rossano F., Shah A., 2014, Safe Close-
Proximity Human-Robot Interaction with Standard
Industrial Robots, IEEE International Conference on
Automation Science and Engineering (CASE).
Leitao, P., Restivo, F., 2006, ADACOR: A holonic
architecture for agile and adaptive manufacturing
control, Computers in Industry, Vol 57, pp. 121-130.
Nilsson, K., Johansson, R., Robertsson, A., Bischoff, R.,
Brogårdh T., Hägele M., 2005, Productive robots and
the SMErobot project, Third Swedish Workshop on
Autonomous Robotics.
Pang, C., Patil, S., Yang, Chen-Wei, Vyatkin, V., Shalyto,
A., 2014, a Portability Study of IEC 61499: Semantics
and Tools, 12th IEEE International Conference on
Industrial Informatics (INDIN), pp. 440-445.
Peters, B.A., Smith, J.S., Curry, J., LaJimodiere C., 1996,
Advanced Tutorial - Simulation Based Scheduling and
Control, Proceedings of the 1996 Winter Simulation
Conference, pp. 194-198.
Poslad, S., 2007, Specifying Protocols for Multi-Agent
Systems Interaction, ACM Transactions on
Autonomous and Adaptive Systems, Vol 2.
Radu, F., Frank, F., 2006, Development and applications of
holonic manufacturing systems: a survey, Journal of
Intelligent Manufacturing, Vol 17, pp. 111-113.
Ricci, A., Santi, A., 2011, Agent-oriented computing:
Agents as a paradigm for computer programming and
software development, The 3
rd
Conference on
Manufacturing Systems, Vol 7, pp. 503–508.
Shen, W., Hao Q., Yoon, H. J., Norrie, D. H., 2006,
Applications of agent - based systems in intelligent
manufacturing: An updated review, Advanced
Engineering Informatics, Vol 20, pp. 415-431.
Sturgeon, J., 2002, Modular production networks: a new
American model of industrial organization, Industrial
and Corporate Change, pp. 451- 496.
Su, J., 2007, Component-based intelligent control
architecture for reconfigurable manufacturing systems,
Ph.D. Thesis, Virginia Polytechnic Institute and State
University.
Teahan, W., 2010, Artificial Intelligence – Agent
Behaviour, BookBoon.
Van Brussel, H., Wyns, J., Valckenaers, P., Bongaerts, L.,
Petters, P., 2003. Reference Architecture for Holonic
Manufacturing Systems: PROSA. Computers in
Industry, Volume 37, p. 95–108.
Vlad, V., Graur, A., Ciufudean, C., Buzduga, C., 2010,
Towards Using the Reconfiguration Capability of IEC
61499 Specifications for Modeling and Implementing
Dynamic Holonic Interactions, 12th WSEAS
International Conference on Automatic Control,
Modelling & Simulation, pp. 213-218.
Wang, F., Hou, Z.G., Xu, D., Tan, M., 2005, An Agent-
Based Holonic Architecture for Reconfigurable
Manufacturing Systems, Advances in Natural
Computation, pp. 622-627.
Wooldridge, M.J., Nicholas, N.R., 1995, Intelligent agents:
Theory and practice, The knowledge engineering, pp.
115-152.
A Novel Implementation Approach for Resource Holons in Reconfigurable Product Manufacturing Cell
139
