
A Particle Filter based Multi-person Tracking with Occlusion
Handling
Ruixing Yu
1
, Bing Zhu
2
, Wenfeng Li
3
and Xianglong Kong
3
1
School of Astronautics, Northwestern Polytechnical University, No.127 Youyi West Road, Xian Shannxi, China
2
School of Electronic Engineering, Xian Shiyou University, No.18 Dianzi er Road, Xian Shannxi, China
3
Shanghai Institute of Satellite Engineering, No.3666 Yuanjiang Road, Shanghai, China
Keywords: Multi-person Tracking, Occlusion, Reliability of Tracklets, Particle Filter.
Abstract: A multi-person tracking method is proposed concerning how to conquer the difficulties such as occlusion
and changes in appearance which makes algorithm hard to get the correct positions of object. First, we
indicate whether the target is blocked or not, through computing the Reliability of Tracklets (RT) based on
the length of tracklets, appearance affinity and the size. Then, we propose a “correct” observation sample
selection method and only update the weights of particle filter when the RT is high. Last, the greedy
bipartite algorithm is used to realize data association. Experiments show that tracking can be successfully
achieved even under severe occlusion.
1 INTRODUCTION
Multiple targets tracking play a key role in various
applications, such as surveillance, robotics, human
motion analysis and others. Tracking multiple
objects in real time in an accurate way is to find all
target trajectories in a given video scene while
ensuring the target identities are correct. However,
due to frequent occlusion by clutter or other objects,
similar appearances of different objects, and other
factors, target trajectories are fragmented. There are
challenges made linking the fragmented trajectories
up so difficult: such as targets often exit the field of
view and enter back later on; and often become
occluded by other targets or objects in the scene.
These factors will get the appearance of target
changed greatly, which make the target re-identify
difficult. Thus, the tracking methods will suffer from
track fragmentations and identity switches. In this
paper, the Reliability of Tracklets (RT) is used to
decrease the effect of occlusion, and only update the
weights of particle filter when the RT is high.
The main contributions of this paper can be
summarized as follows: (i) Selecting the correct
object positions from the output set of the particle
filter and detectors; (ii) An observing the selection
process with RT is brought into the particle filter
that could deal with partial object occlusion and
generate reliable tracklets.
2 RELATED WORKS
Recently, with the big progress of object
detection(Yang and Nevatia, 2012, Felzenszwalb et
al., 2014, Dollar et al., 2012, Dollár et al., 2010), the
detect-then-track approaches(Breitenstein et al.,
2011, Brendel et al., 2011, Pellegrini et al., 2010)
have become increasingly popular. The main idea of
the detect-then-track approaches is that a detector is
run on each frame to get the position and size of
target, and then the data association is used to linked
detections across multi-frames to obtain target
trajectories and must not be assigned two different
detections to the same target. Classical data
association approaches include probability data
association filter (PDA)(Bar-Shalom et al., 2010),
joint probability data association filter
(JPDA)(Fortmann et al., 1983), greedy matching
(Pirsiavash et al., 2011), hungarian algorithm (H.,
1955) or particle filters (Breitenstein et al., 2009), et
al. To distinguish between each separate target and
improve the accuracy of the data association, the
appearance model (Xing et al., 2009, Li et al., 2008)
is usually employed to associate the
target and detections. And to conquer frequent
Yu, R., Zhu, B., Li, W. and Kong, X.
A Particle Filter based Multi-person Tracking with Occlusion Handling.
DOI: 10.5220/0005961602010207
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 201-207
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
201
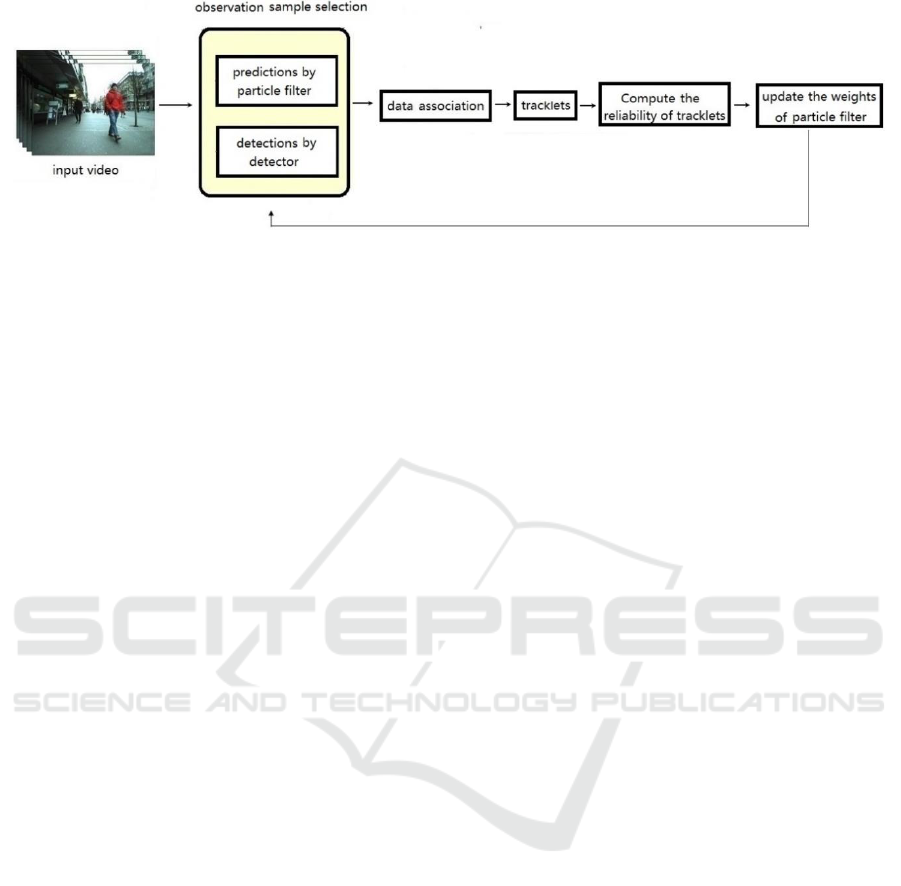
Figure 1: An Overview of our Proposed Multi-Object Tracking Framework.
prolonged occlusions and target interactions, the
appearance should be updated. Online
methods(Grabner et al., 2006, Collins et al., 2005,
Babenko et al., 2009, Kalal et al., 2010) can be used
to update the appearance of the object. Also to
improve the accuracy of multi-object tracking, along
with appearance models based on simple cues like
color histograms, linear motion models help in
maintaining track identity while linking tracklets by
enforcing motion smoothness. Like, B. Wu (Wu and
Nevatia, 2005) associates object hypotheses with
detections by evaluating their affinities for
appearances, positions, and sizes. X. Song(Song et
al., 2008) associates object hypotheses with
detections using three affinity terms: position, size,
and the score of the person-specific classifier based
on online learning. However, the above kind of
detect-then-track approaches depends on the precise
of the detectors. Unfortunately the detectors are
often not perfect and can fail to detect the object of
interest, or identify a false target position, which will
accumulative error over time, resulting in tracking
drift and failure. We proposed a correct observation
sample selection method to compensate the error
made by the detector. Through computing the RT of
tracklets, we indicate whether the target is blocked
or not. Our proposed framework is shown in figure
1.
3 SAMPLE SELECTION
The Particle filtering(Breitenstein et al., 2009) is a
method for state estimation based on a Monte Carlo
method and it handles nonlinear models with non-
Gaussian noise. The particle filter approximates the
state of object in these two steps by updating the
weights of the particles. And it can be done by well-
known two-step recursion procedure:
Predict:
(1)
Update:
(2)
Where
is the position and size of particular
object i at frame t.
is the states of the object i
form the frame 1 to t.
is the observations of the
object i form the frame 1 to t.
The state of the object can be well updated, only
if the system has a reliable observation model.
However if some object(s) is blocked, we won’t
have the correct position of target. A lot of methods
were proposed to solve this problem, like (Yang and
Nevatia, 2012, Song et al., 2008). They collected N
images or image patches with different locations and
scales from a small neighbourhood around the
current tracking location, which made the prediction
method confued which one is the correct observation
sample. So we only select one “correct” sample as
observation sample. The selection process is
illustrated in figure 2.
Since tracklets with low RT (Reliability of
Tracklets) values are likely to be polluted by
occlusion, we propose to infer occlusion information
from the RT scores and eventually utilize only those
with high RT. We assume that a target’s appearance
changes little in short time. So we use the previous n
(n=5) frames to represent the appearance of object to
be tracked. In order to represent the target more
precisely, the cumulative histogram of the past n
frames is used to represent the targets. The HOG
(Histogram of Oriented Gradient)(Dalal and Triggs,
2005) and RGB Histogram techniques are used to
generate the features. The benefits of our technique
include: reducing the impact of the occlusion, by
updating the observation template only with samples
of RT values higher than 0.5.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
202

Figure 2: “Correct” observation sample selection process.
4 RELIABILITY CRITERION OF
TRACKLETS
In order to get reliable trajectories, a criteria is
proposed to judge the reliability of the target
trajectory. In our algorithm, a tracklet which is
considered as reliable needs to fulfill three
requirements:
It is longer than a certain threshold;
A high affinity between a tracklet and an
associated detection;
The size of the detected object has not
changed substantially. That means the target is
not occluded and successfully segmented from
the background.
According to these three constraints, we propose
the criteria to calculate the reliability of the target
trajectory. The formula:
1
1
1
( ) ( , ) 1
1
# ( )- # ( )
1
1
# ( )
e
k
i i i
ks
n
x
n
x
LW
RT T A T d
LL
F t F t x
n
F t x
n
(3)
where RT is an abbreviation for Reliability of
Tracklets. T
i
is tracklet of target i;
k
i
d
is detections.
s and e are the time stamps of the start- and end-
frame of the tracklet. A is used to calculate the
affinity between trajectories and detections. #F(t)
indicates the total number of pixels in detecting box
at frame t; while
1
# ( )
n
x
F t x n
represents the
average pixel numbers of x frames before frame t in
their respective detecting box. L is the length of a
tracklet, and W is the number of frames in which the
object i is missing due to occlusion by other objects
or unreliable detection, and is given as:
1
i i i
end begin
W F F L
(4)
Where
i
end
F
is the end of frame of the target i,
and
i
begin
F
is the start of frame of the target i,
i
L
is
the length of tracklets of target i.
From formula (3) we can see that the larger RT
value is, the more reliable the trajectory is. So we
use the formula (3) to judge the reliability of the
trajectory.
The appearance, shape and motion attributes are
calculated to compare the affinity between two
tracklets. See more details in literature [24].
( , ) ( , ) ( , ) ( , )
i i i i i
t a i t m i t s i t
A T d A T d A T d A T d
(5)
Appearance Model: We use HOG+RGB
histograms as the appearance model of a tracklet.
( , ) exp( ( , ))
a i j i j
A T T d T T
(6)
In equation (6), d is the Bhattacharya distance.
Motion Model: We calculate both the forward
velocity and backward velocity of the tracklet as its
motion model. The forward velocity is calculated
from the refined position of the tail response of the
tracklet while the backward velocity is calculated
from the refined position of the head response of the
tracklet.
( , ) ( ; , )
( ; , )
tail F head B
m i j i i j j
tail B tail F
j j i i
A T T G p v t p
G p v t p
(7)
In equation (7), motion model in forward
direction is represented by a gaussian
{ , }
FF
ii
x
,
and in backward direction by a gaussian
{ , }
BB
ii
x
.
head
i
p
is the position of the head response of tracklet
T
i
and
tail
i
p
is the position of the tail response of
tracklet T
i
.
Size Model: we calculate the height h and width
w of objects.
A Particle Filter based Multi-person Tracking with Occlusion Handling
203

( , )=exp
i j i j
s i j
i j i j
h h w w
A T T
h h w w
(8)
Where, h is height and w is width.
5 DATA ASSOCIATION BASED
ON GREEDY BIPARTITE
GRAPH MATCH
The greedy bipartite graph match(Breitenstein et al.,
2009, Birnbaum and Mathieu, 2008) is used to
associate the detections with existing trajectories in
every frame. First, the similarity is computed
between tracklets and detections to get the matching
pairs. Then, the pair with maximum similarity score
is iteratively selected, and the rows and columns
belonging to tracklets and detections are deleted.
This is repeated until no further valid pair is found.
Finally, in order to guarantee a selected detection is
actually a good match to a target, we only save the
pairs above the threshold we set.
The detections which are not associated with any
existing trajectories are used to initialize a new
potential trajectory. Once the length of a potential
trajectory becomes longer than a threshold, it gets
formally initialized. On the other hand, when a new
detection is associated to a trajectory, we update all
its state variables, namely, the position, the size, the
velocity, the RT based on the new detection.
However, due to occlusion or miss-detection, there
are some fragmentations in trajectories, we use
extrapolation and interpolation method to
complement trajectory.
6 EXPERIMENTS AND
ANALYSIS
6.1 Tracking Results
We tested our algorithm on several publicly
challenging available video sequences, which are
ETH BAHNHOF sequence, ETH SUNNY DAY
sequence, ETH JELMOLI sequence. We use the
ground truth annotations and automatic evaluation
code provided by (Bing et al., 2014) for quantitative
evaluation. In these provided annotations,
“BAHNHOF” sequence contains 95 individuals over
399 frames. “SUNNY DAY” sequence contains 30
individuals over 354 frames. Below are the tracking
results and the trajectories of targets.
(a) Frame 11
(b) Frame 19(target 1 is blocked by target 3)
(c) Frame 71(From the left to right: the second target,
labelled by 7, stopped moving in frame 71)
(d) Frame 186(Our algorithm correctly recaptured the
target. Then until it disappeared from the visual field, the
label of the target is still No.7)
(e) Frame 301
Figure 3: Tracking results on BAHNHOF scene.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
204

(a) Frame 7
(b) Frame 88(target 11 and 13 are lost)
(c) Frame 94(target 11 is recaptured)
(d) Frame 118(target 13 is recaptured)
(e) Frame 196(target 17 is blocked by target 16, however
our method still gets the correct trajectory)
(f) Frame 302
Figure 4: Tracking results on Sunny Day scene.
(a) Frame 17(target 4 and 6 are blocked by target 3, however
our method still gets the correct trajectories, see in frame 27
below)
(b) Frame 27
(c) Frame 271(The target 30 is blocked until frame 289.)
(d) Frame 289(Target 30 is recaptured)
(e) Frame 307(Target 30 is tracked correctly)
(e) Frame 323(Target 30 is tracked correctly)
(f) Frame 358
Figure 5: Tracking results on Jelmoli scene.
A Particle Filter based Multi-person Tracking with Occlusion Handling
205
Table 1: ETH dataset tracking results comparison.
Method
Recall
Precision
FAF
GT
MT
PT
ML
Frag
IDS
PRIMPT(Kuo and
Nevatia, 2011)
76.8%
86.6%
0.891
125
58.4%
33.6%
8.0%
23
11
Our method
79.6%
90.1%
0.696
125
66.3%
24.2%
8.4%
17
5
6.2 Evaluation Metric
Since it is difficult to use a single score to judge any
tracking performance, several definitions are used as
follows:
Recall: correctly matched detections / total
detections in ground truth.
Precision: correctly matched detections / total
detections in the tracking result.
FAF: average false alarms per frame.
GT: the number of trajectories in ground truth.
MT: the ratio of mostly tracked trajectories,
which are successfully tracked for more than
80%.
ML: the ratio of mostly lost trajectories, which
are successfully tracked for less than 20%.
PT: the ratio of partially tracked trajectories,
i.e., 1-MT-ML.
Frag: fragments, the number of times the
ground truth trajectory is interrupted.
IDS: id switch, the number of times that a
tracked trajectory changes its matched id.
Higher scores the recall, precision and MT are
the better results of tracking algorithm are. While,
lower scores the FAF, ML, PT, Frag and IDS are
indicate the better results of the tracking method.
We evaluate our approach on two public
sequences: ETH BAHNHOF sequence and ETH
SUNNY DAY sequence. These two sequences are
captured by a stereo pair of cameras mounted on a
moving child stroller in a busy street scene. Because
of the low view angle and forward moving cameras,
occlusions and interactions of the targets frequently
occur in these video sequences, which make the
dataset rather challenging. For fair comparison, the
two sequences are both from the left camera and also
use the same ground truth as reference(Kuo and
Nevatia, 2011). The tracking evaluation results are
shown in Table 1.
Compared with (Kuo and Nevatia, 2011), the
improvement is obvious for some metrics. Our
approach achieves the highest recall. It also achieves
the lowest Frag, ID switches. Meanwhile, our
approach achieves competitive performance on
precision, false alarms per frame compared with
(Kuo and Nevatia, 2011).
ACKNOWLEDGEMENTS
This work was supported, in part, by the National
Natural Science Foundation of China (Grant No.
61101191), Aeronautical Science Foundation of
China (Grant No. 20130153003), Science and
technology research of Shaanxi Province(Grant No.
2013K09-18), and SAST Foundation (Grant No.
SAST201342, No. SAST2015040)
REFERENCES
Yang, B. & Nevatia, R. An Online Learned Crf Model For
Multi-Target Tracking. In Cvpr, 2012. 2034-2041.
Felzenszwalb, P. F., Girshick, R. B., Mcallester, D. &
Ramanan, D. 2014. Object Detection With
Discriminatively Trained Part-Based Models. Ieee
Transactions On Pattern Analysis & Machine
Intelligence 32, 6-7.
Dollar, P., Wojek, C., Schiele, B. & Perona, P. 2012.
Pedestrian Detection: An Evaluation Of The State Of
The Art. Pattern Analysis & Machine Intelligence Ieee
Transactions On, 34, 743-761.
Doll R, P., Belongie, S. & Perona, P. 2010. The Fastest
Pedestrian Detector In The West. Bmvc, 1-11.
Breitenstein, M. D., Reichlin, F., Leibe, B., Koller-Meier,
E. & Van Gool, L. 2011. Online Multiperson
Tracking-By-Detection From A Single, Uncalibrated
Camera. Ieee Transactions On Pattern Analysis &
Machine Intelligence, 33, 1820-1833.
Brendel, W., Amer, M. & Todorovic, S. Multiobject
Tracking As Maximum Weight Independent Set.
Computer Vision And Pattern Recognition (Cvpr),
2011 Ieee Conference On, 2011. 1273-1280.
Pellegrini, S., Ess, A. & Gool, L. V. 2010. Improving Data
Association By Joint Modeling Of Pedestrian
Trajectories And Groupings. Lecture Notes In
Computer Science, 6311, 452-465.
Bar-Shalom, Y., Daum, F. & Huang, J. 2010. The
Probabilistic Data Association Filter. Ieee Control
Systems, 29, 82-100.
Fortmann, T. E., Bar-Shalom, Y. & Scheffe, M. 1983.
Sonar Tracking Of Multiple Targets Using Joint
Probabilistic Data Association. Oceanic Engineering
Ieee Journal Of, 8, 173-184.
Pirsiavash, H., Ramanan, D. & Fowlkes, C. C. Globally-
Optimal Greedy Algorithms For Tracking A Variable
Number Of Objects. Proceedings Of The 2011 Ieee
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
206

Conference On Computer Vision And Pattern
Recognition, 2011. 1201-1208.
H., W. 1955. The Hungarian Method For The Assignment
Problem. Naval Research Logistics Quarterly, 2, 83-97.
Breitenstein, M. D., Reichlin, F., Leibe, B., Koller-Meier,
E. & Van Gool, L. Robust Tracking-By-Detection
Using A Detector Confidence Particle Filter.
Computer Vision, 2009 Ieee 12th International
Conference On, 2009. 1515-1522.
Xing, J., Ai, H. & Lao, S. Multi-Object Tracking Through
Occlusions By Local Tracklets Filtering And Global
Tracklets Association With Detection Responses. Ieee
Conference On Computer Vision & Pattern
Recognition, 2009. 1200-1207.
Li, Y., Ai, H., Yamashita, T., Lao, S. & Kawade, M. 2008.
Tracking In Low Frame Rate Video: A Cascade
Particle Filter With Discriminative Observers Of
Different Life Spans. Ieee Trans Pattern Anal Mach
Intell. Ieee Transactions On Pattern Analysis &
Machine Intelligence, 30.
Grabner, H., Bischof, H. & Grabner, M. 2006. Real-Time
Tracking Via On-Line Boosting. Bmvc, 47-56.
Collins, R. T., Liu, Y. & Leordeanu, M. 2005. Online
Selection Of Discriminative Tracking Features. Ieee
Transactions On Pattern Analysis & Machine
Intelligence 27, 1631-1643.
Babenko, B., Yang, M. H. & Belongie, S. 2009. Visual
Tracking With Online Multiple Instance Learning.
Ieee Trans Pattern Anal Mach Intell, 983-990.
Kalal, Z., Matas, J. & Mikolajczyk, K. P-N Learning:
Bootstrapping Binary Classifiers By Structural
Constraints. Proceedings / Cvpr, Ieee Computer
Society Conference On Computer Vision And Pattern
Recognition. Ieee Computer Society Conference On
Computer Vision And Pattern Recognition, 2010. 49-56.
Wu, B. & Nevatia, R. Detection Of Multiple, Partially
Occluded Humans In A Single Image By Bayesian
Combination Of Edgelet Part Detectors. Computer
Vision, 2005. Iccv 2005. Tenth Ieee International
Conference On, 2005. 90-97.
Song, X., Cui, J., Zha, H. & Zhao, H. 2008. Vision-Based
Multiple Interacting Targets Tracking Via On-Line
Supervised Learning, Springer Berlin Heidelberg.
Dalal, N. & Triggs, B. Histograms Of Oriented Gradients
For Human Detection. Computer Vision And Pattern
Recognition, 2005. Cvpr 2005. Ieee Computer Society
Conference On, 2005. 886-893 Vol. 1.
Birnbaum, B. & Mathieu, C. 2008. On-Line Bipartite
Matching Made Simple. Acm Sigact News, 39, 80-87.
Bing, W., Gang, W., Kap Luk, C. & Li, W. Tracklet
Association With Online Target-Specific Metric Learning.
Computer Vision And Pattern Recognition (Cvpr), 2014
Ieee Conference On, 23-28 June 2014 2014. 1234-1241.
Kuo, C. H. & Nevatia, R. How Does Person Identity
Recognition Help Multi-Person Tracking?
Proceedings /Cvpr, Ieee Computer Society Conference
On Computer Vision And Pattern Recognition. Ieee
Computer Society Conference On Computer Vision
And Pattern Recognition, 2011. 1217-1224.
A Particle Filter based Multi-person Tracking with Occlusion Handling
207
