
Autonomous Exploration and Mapping using a Mobile Robot
Running ROS
Rachael N. Darmanin and Marvin Bugeja
Department of Systems and Control Engineering, University of Malta, Msida, Malta
Keywords:
Wheeled Mobile Robots, ROS, Autonomous Exploration, SLAM.
Abstract:
This paper proposes a practical solution to the autonomous exploration and mapping problem using a single
mobile robot. Moreover, the authors implement the proposed scheme within the Robot Operating System
(ROS), and validate it experimentally using PowerBot, a real wheeled mobile robot equipped with a 2D laser
scanner. In essence, the proposed scheme integrates an efficient particle-filter-based SLAM algorithm, two
different exploration strategies, and a path-planning and navigation module. The modular nature of the pro-
posed scheme is intentional and advantageous. It allows the authors to compare the two exploration strategies
under investigation objectively and with ease. Finally, hypotheses testing is also used to strengthen the results
of the comparative analysis.
1 INTRODUCTION
Exploration and mapping by an autonomous agent
have been of particular interest to the robotics com-
munity for decades. Research shows that the au-
tonomous mapping of an unknown environment by a
mobile robot is a non-trivial task (Thrun et al., 2005).
Global Positioning Systems (GPS) and the use of bea-
cons for mappingan unknownenvironmentmay facil-
itate the task of mapping (Dissanayake et al., 2011).
However, such systems suffer from a number of in-
herent limitations, namely, the inaccessibility of GPS
indoors and the laborious setting up of strategically
placed beacons. Hence, the concept of Simultaneous
Localization and Mapping (SLAM), was developed in
order to amalgamate sensory data into a world model
(or a map). Through probabilistic techniques, SLAM
algorithms are capable of processing sensory data to
estimate the location of a robotic system and a map of
its environment at the same time.
In robotics, maps are mainly acquired to enable
autonomous navigation. However, mapping using
robots can also be useful when it comes to explore
and map dangerous environments, or places that are
inaccessible to human beings. Hence, autonomous
exploration strategies were developed, which enable
the robot to determine the next location to explore
in order to improve its map and localization esti-
mates. Exploration strategies place an emphasis on
autonomously mapping as much of an unknown en-
vironment as possible, and in the shortest time pos-
sible. Other researchers argue that rather than just
exploratory actions, accurate mapping requires ex-
ploitation actions, such as place revisiting actions
(Makarenko et al., 2002). This gave rise to Active
SLAM strategies, that seek to improve the localiza-
tion estimate of the robot rather than explore as much
of the environment as possible in the shortest time.
However, both exploration and Active SLAM strate-
gies ultimately provide the robot with a sequence of
locations that it needs to visit in order to meet the
specified exploration criteria.
For a robot to autonomously explore and map an
environment, it must follow a set of navigation in-
structions that allow it to proceed from one location
to the next safely, even in the presence of obstacles.
During the years, several path planning and motion
control algorithms have been proposed which enable
the robot to move to the chosen location. The integra-
tion of a SLAM algorithm, an exploration or Active
SLAM strategy and a path planning/navigation algo-
rithm allows the robot to autonomously explore and
map an unknownenvironmentusing just sensory data.
The purpose of this work was to develop a sin-
gle robot system, running Robot Operating System
(ROS), that can autonomously explore and map un-
known environments efficiently. The system needed
to be modular, in that the SLAM, path planning and
motion control modules, can be used with differ-
ent exploration strategies, without any modifications.
208
Darmanin, R. and Bugeja, M.
Autonomous Exploration and Mapping using a Mobile Robot Running ROS.
DOI: 10.5220/0005962102080215
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 208-215
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
ROS facilitates this modular implementation since it
allows a set of independent processes to communicate
through a message passing structure.
The main contributions of this work are: 1) the de-
velopment and experimental evaluation of a new ROS
package consisting of two autonomous exploration
strategies for mobile robots. To the best of the au-
thors’ knowledge, no other ROS package offering the
same functionality is available to date; 2) a compara-
tive study of the two mentioned exploration strategies,
based on physical experiments in a real-life environ-
ment.
The rest of this paper is structured as fol-
lows. Section 2 provides a review of the exist-
ing autonomous exploration and mapping systems.
Section 3 describes the main hardware used in this
implementation and the underlying software frame-
work that makes up the whole robotic system.
Section 4, presents a set of experimental results while
Section 5 contains a comparative analysis, backed up
by statistical hypothesis testing, of the two explo-
ration strategies under investigation. Finally, conclu-
sions from this work are drawn in Section 6.
2 RELATED WORK
Being aware of one’s environment means that: one
is able to perceive the environment, localize himself
in it, and be able to navigate effectively in this envi-
ronment. In the field of mobile robotics, this involves
learning maps of an unknown environment, which is
the integration of three non-trivial tasks that must be
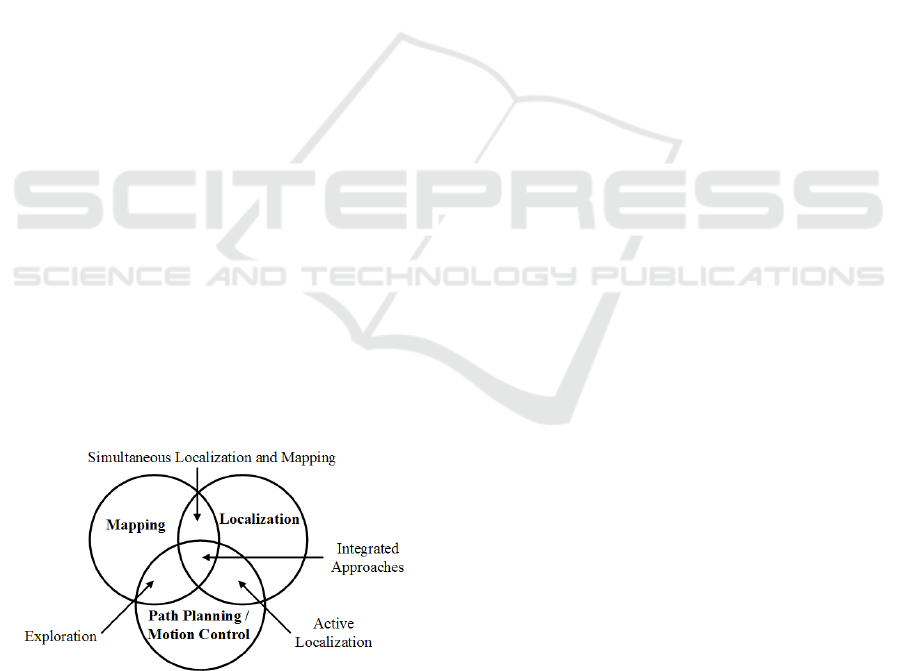
solved concurrently (Stachniss et al., 2005). Figure 1
illustrates this concept as the integration of mapping,
localization and path planning and motion control.
Figure 1: Illustration of the integrated approaches, adapted
from (Makarenko et al., 2002).
Given a known map, several path planning algo-
rithms such as Dijkstra’s algorithm (Dijkstra, 1959),
A* algorithm (Dechter and Pearl, 1985), D* algo-
rithm (Stentz, 1994) and Dynamic Window Approach
(DWA) (Fox et al., 1997), among others, have been
proposed to allow a robot to navigate autonomously
in the environment. During the years, there have
been many advancements in the field of path planning
algorithms that can be used seamlessly within the
integrated problem of autonomous exploration and
mapping. Moreover, the Dijkstra, A* and D* algo-
rithms are all global path planners, in that they plan a
path from the current robot location to the destination
based on the current global map (the whole map ac-
quired so far). The DWA was designed to make use of
the velocity control space to search for control com-
mands that must be sent to the robot in order to reach
a goal destination. Hence, the DWA does not make
use of a global map, but rather it uses the local map
obtained through sensory data.
Perhaps the most complex problem that must be
solved in the task illustrated in Figure 1, is SLAM. In
autonomous exploration, the map estimate produced
by SLAM is used by the exploration algorithms in
order to identify which is the best location that the
robot must visit next. Overall, SLAM algorithms
may be organized into three main categories as fol-
lows: Extended Kalman Filter (EKF) SLAM, Particle
Filter SLAM, and Graph Based SLAM. EKF SLAM
was for many years the preferred choice since it re-
quires a simple and straight-forward implementation
and performs well in small areas having a limited
number of landmarks. However, since EKF SLAM
bases its estimate on just one hypothesis and assumes
that the posterior is normally distributed, it may be-
come overconfident in its estimate, leading to less ac-
curate mapping (Dissanayake et al., 2011). Hence,
Particle Filtering became the preferred probabilis-
tic technique for many researchers. Particularly, in
(Thrun et al., 2004), the authors integrate the common
Sequential Importance Resampling, (SIR) filter with
EKF to produce FastSLAM, which results in a faster
algorithm, when compared to the common SIR filter
on its own. Furthermore, Rao-Blackwellized Particle
Filters are more commonly used to solve the SLAM
problem since they attempt to reduce the degeneracy
and particle depletion problems presented by less ad-
vanced particle filters such as the Sequential Impor-
tance Sampling (SIS) and SIR filters (Grisetti et al.,
2007). In (Grisetti et al., 2007) the authors propose
two improved techniques for Rao-Blackwellized Par-
ticle Filter SLAM, that make the algorithm more effi-
cient and accurate in estimating the most likely pose
as well as having a reduction in the particle depletion
problem. The implementation of this improved Rao-
Blackwellized Particle Filter is often referred to as
GMapping, which is directly accessible online from
openslam.org
. Moreover, the use of Graph-Based
Autonomous Exploration and Mapping using a Mobile Robot Running ROS
209

techniques in SLAM is fast gaining popularity. In
Graph-Based SLAM, each node in the graph repre-
sents an estimated robot pose or the estimated posi-
tion of a landmark, while the edges connecting these
nodes encode in them sensor observations that are
constrained by the estimated robot pose. The perfor-
mance of Graph-Based SLAM is said to be compara-
ble to that of Particle Filter-Based SLAM algorithms
such as GMapping (Burgard et al., 2009).
Although the task of choosing the next loca-
tion that the robot should visit seems to be intu-
itive, several researchers have developed several dif-
ferent exploration and Active SLAM algorithms for
this purpose. One very popular and simple explo-
ration strategy is the Nearest Frontier approach (Ya-
mauchi, 1997). This algorithm simply analyses an
Occupancy Grid Map and detects all potential borders
(called candidate frontiers) between the cells marked
as OPEN (free from obstacles) and those marked as
UNKNOWN (not yet explored). Such a map is seg-
mented into cells, where each cell is assigned with a
probability of occupancy,with zero probability mean-
ing that it is free from obstacles, and with a probabil-
ity of one, meaning that it is OCCUPIED. Normally,
a probability of 0.5 means that there is no informa-
tion about the occupancy of the cell, and hence it is
still UNKNOWN (Yamauchi, 1997). The distance be-
tween the current robot pose and each frontier, is anal-
ysed, and the frontier closest to the robot is chosen as
the next location to explore.
Another algorithm that is designed to explore as
much of the environment as possible is the Next Best
View (NBV) approach proposed in (Gonzalez-Ba˜nos
and Latombe, 2002). In this case, the evaluation cri-
teria of the candidate destinations, attempt to strike a
balance between the amount of unknown area that the
robot can explore from that location, and the distance
that the robot must travel to arrive there.
Unlike the Nearest Frontier and the NBV strate-
gies just described, in (Makarenko et al., 2002) and
(Stachniss et al., 2005), among others, the authors
propose techniques that do not only focus on explor-
ing as much of the environment as possible, but in
addition aim to improve the localization estimate of
the robot (Active SLAM). Particularly, in (Stachniss
et al., 2005), the authors propose a technique that
makes use of the entropy of a Rao-Blackwellized Par-
ticle Filter together with the distance from the current
robot pose in order to evaluate candidate destinations.
To date, the robotics community is still in de-
bate on which of these exploration strategies is best
to solve the problem of autonomous exploration and
mapping. To this end, several works such as those
presented in (Amigoni, 2008; Carlone et al., 2014),
among others, seek to compare such strategies. In
(Amigoni, 2008), the author shows that the simpler
algorithms, such as the NBV approach, yield the best
results in the shortest time possible, and the robot
travelling the shortest distance. However, in (Carlone
et al., 2014), the authors show that when the focus is
placed on the quality of the map, then those strate-
gies that involve Active SLAM produce the best re-
sults, even if not in the shortest time possible. Such
works indicate that the choice of exploration or Ac-
tive SLAM algorithm is highly dependent on the ap-
plication and on the criteria that shall be used in the
evaluation of the results.
3 SYSTEM DESIGN AND
IMPLEMENTATION
The concept of autonomous exploration and map-
ping represented in Figure 1 was implemented in
ROS on PowerBot
TM
, a differentially-drivenwheeled
mobile robot designed and manufactured by Adept
Mobilerobots for research and rapid prototyping.
PowerBot is equipped with a SICK LMS200 laser
scanner, an Advanced Robotics Control and Opera-
tions (ARCOS) robot controller for low-level motion
control, as well as an on-board computerfor algorithm
development. The on-board computer is interfaced
with the robot controller via Advanced Robotics In-
terface for Applications (ARIA), which is a library of
functions that are capable of handling the lowest level
details of the client-server interactions, such as con-
trolling the speed of the robot.
Robot Operating System (ROS) is a software
framework that is ideal for the development of robotic
applications. It consists of a number of software pack-
ages that are used to perform particular tasks, for ex-
ample, SLAM. ROS facilitates modular implementa-
tion of different functions, in that processes that are
currently running on the system (called nodes), in-
teract between themselves through a message passing
system, as shown in Figure 2. Each packet of data is
sent between nodes according to the topic that it has
been assigned. The topic defines the type of data mes-
sage that is sent. Furthermore, a node may either be
a publishing node (broadcasting data) or a subscriber
node (receiving data). Hence any node subscribing
to the same topic shall receive the same data being
broadcast by the publisher. For instance, in Figure 2
the publishing node “talker” is communicating with
the subscriber node “listener” by sending data mes-
sages over the topic “chatter”. These interactions are
controlled by the master node called “roscore”.
The modularity of ROS leads to a rather simple
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
210

Figure 2: ROS architecture of nodes and topics.
design that emerges from the integration of the fun-
damental concepts and the system block diagram de-
picted in Figure 3. Going from the block diagram in
Figure 3 to a system designed in ROS requires the
identification of the specific package to be used in
place of each component in the block diagram. The
parameters of each package must then be tuned for
the specific robot platform and application.
Figure 3: ROS architecture of nodes and topics.
To perform SLAM, the gmapping package, which
implements the Rao-Blackwellized particle-filter-
based approach developed in (Grisetti et al., 2007),
was chosen due to its ability to map an environment
in an accurate and efficient manner. In contrast to
EKF-based SLAM, this technique uses multiple hy-
potheses represented by the particle set in the parti-
cle filter. The node, called “slam
gmapping”, sub-
scribes to the raw odometry data and laser scan data
over the “/RosAria/pose” and “/scan” topics, respec-
tively. The package “ROSARIA” acts as a wrapper
for the ARIA libraries in ROS. It allows the transmis-
sion of high level commands to the robot controller
from ROS. In fact, the odometric pose estimate of the
robot is published by the “RosAria” node. In turn, the
“slam
gmapping”node publishes the map data, which
is then used by the exploration algorithm to compute
the next location that the robot needs to explore.
The published map is an Occupancy Grid Map
vector. Moreover, some of the “slam
gmapping” pa-
rameters had to be tuned in order to extract the best
performance in the given environment with the given
robot. For example: two particular parameters were
used to enable the SLAM package to execute a scan
every time the robot translates by 0.2 metres or rotates
by 0.1 radians. The settings were chosen in an attempt
to obtain the best map with the available computa-
tional power, as more frequent scans naturally require
more computational power. Furthermore, the laser
range was also tuned in accordance with the speci-
fications of the laser scanner, namely the maximum
range setting was set to five metres. Finally, the map
was set to be updated every three seconds.
Although there are some packages that implement
the Nearest Frontier exploration approach in ROS,
these presented certain limitations, such as not being
fully autonomous, and thus could not be used for the
intended purpose. Hence, the Nearest Frontier ap-
proach proposed in (Yamauchi, 1997) and the Next
Best View approach proposed in (Gonzalez-Ba˜nos and
Latombe, 2002) were both implemented from scratch
as ROS nodes in a new package called “exploration”.
To the best of the authors knowledge, this is the first
time that these two algorithms are being made avail-
able in ROS.
For both exploration strategies, the potential can-
didates for exploration emerge through the use of
frontier detection which was also proposed in (Ya-
mauchi, 1997). Frontier detection is performed in two
steps:
1. The search for frontier cells, and
2. The grouping of said frontier cells into frontiers
comprising adjacent frontier cells only.
In the search of frontier cells, the algorithm traverses
the map data and creates an vector of frontier cells.
These frontier cells are then grouped into frontiers ac-
cording to their adjacency. Each frontier is then stored
in a two-dimensional vector which is used by the ex-
ploration algorithm for further analysis. Eventually,
the exploration process terminates when the frontier
detection algorithm can no longer detect frontiers that
are at least ten cells long. This applies to both explo-
ration approaches that were examined in this work.
The difference among the two approaches lies
in how they evaluate the candidate destinations and
choose the location that the robot must explore next.
In the Nearest Frontier approach, a global path is
planned from the current robot pose to each candidate.
The candidate that is closest to the robot (i.e. the one
having the shortest path) is then chosen. On the other
hand, the Next Best View approach implements the
following equation to rank the potential candidates,
g(q) = A(q)exp(−λL(q, q
k
)) (1)
where g(q) represents the ranking function, A(q) is
the total unknown area that is expected to be covered
by the laser scanner from a candidate location, and
L(q, q
k
) is the length of the path planned from the cur-
rent robot pose to each candidate location, using the
global occupancy grid map published by the SLAM
algorithm.
The path length, L(q, q
k
) is computed in the same
manner as it is computed in the Nearest Frontier ap-
proach. This means that the same global path planner
used to plan accessible paths for navigation is used to
Autonomous Exploration and Mapping using a Mobile Robot Running ROS
211

plan a path for the robot in an incomplete occupancy
grid map. The length of this path is then computed.
The unknown area that the robot can potentially “see”
from a candidate location, A(q), is calculated by a ray
casting technique, which is also used in (Gonzalez-
Ba˜nos and Latombe, 2002). Ray casting attempts to
simulate the data obtained through a single scan of
the laser scanner. Given a scan resolution, the max-
imum laser range and the scanning angle of the real
laser scanner, a number of rays are projected from a
candidate location. If the ray encounters a known cell
(OPEN or OCCUPIED), then the length of the ray
from that point to the maximum ray length is cropped
out. Consequently, the endpoint of the ray is the point
at which the ray hits a known cell, and therefore, the
length of that ray is the Euclidean distance between
the candidate location coordinatesand the coordinates
of the ray endpoint. Thus, the unknown area that
may be visible from a candidate point is the summa-
tion of the lengths of the rays projected outwards over
the unknown cells only, as seen in (2), where (x
c
, y
c
)
are the map coordinates of the candidate location and
(x
end
, y
end
) are the coordinates of the ray endpoint.
A(q) =
∑
No. of rays
q
(x
end
− x
c
)
2
+ (y
end
− y
c
)
2
(2)
Furthermore, the parameter λ plays an important role
in the selection of the next best view since it allows
the robot to either prefer shorter routes over a larger
area of visibility, or vice-versa. If the value of λ
is small, the algorithm prefers the candidates from
which a larger unknown area may be explored and
hence gives them a higher rank. If λ is large, the algo-
rithm gives a higher rank to those candidates that are
closer to the robot. Eventually the candidate that has
the largest ranking value, g(q), is chosen as the next
location that the robot must navigate to and explore.
As soon as the nextdestination is chosen, the robot
must navigate to that location. To do so, path plan-
ning and motion control algorithms are required to
allow the robot to navigate effectively in an environ-
ment cluttered with both static and dynamic obstacles.
For this purpose, the package “move
base” was used.
This package requires the pose of the robot within the
map to be able to plan a global path from the current
robot pose to the goal destination. In order to take the
dimensions of the robot into consideration, the path
is planned in a global costmap that inflates the cost
around each OCCUPIED cell. If the robot traverses
the inflated circle around such a cell, it may be either
close to colliding with an obstacle or in fact, it may be
in collision, depending on the cost of each cell. This
global costmap is constructed on the static occupancy
grid map that is being built by SLAM. Moreover, hav-
ing just a global path planned does not enable the
robot to avoid dynamic obstacles such as people walk-
ing around it. To mitigate this problem, the package
makes use of a local path planner, which plans inter-
mediate paths using a local map. This local map is
another costmap which is constructed using the laser
scan data directly. Therefore, if a dynamic obstacle
appears in the local path planned of the robot, this
would be detected by the laser scanner and the local
path planner changes course accordingly. However,
the local path planner always seeks to guide the robot
as close to the global path as possible. For this effect,
the global and local costmap parameters were tuned to
the dimensions of the robot. Furthermore, the global
path planner adopted in this case is the Dijkstra’s Al-
gorithm (Dijkstra, 1959), while the local path plan-
ner adopted is the Dynamic Window Approach (Fox
et al., 1997). The implementation of these path plan-
ners were both available in ROS.
4 RESULTS
One of the aims of this study was to compare the
mapping accuracy of two exploration strategies which
were implemented as part of a complete autonomous
exploration and mapping system in ROS. The first
set of results presented in Section 4.1 shows how the
different exploration strategies choose different ex-
ploratory locations from a set of candidates. Further-
more, Section 4.2 presents a set of results obtained
through a number of real life autonomous exploration
and mapping experiments. The map obtained in each
experiment was compared to a ground truth map, il-
lustrated in Figure 4, which was obtained by manually
steering the robot in the environment. Hence, the Ac-
ceptance Index metric could be calculated. This com-
parativemetric was introduced in (Carpin, 2008). The
acceptance index, ω, is calculated as the ratio of the
agreement between the known cells of a ground truth
map, M1, and a resulting map, M2, to the total sum
of agreed and disagreed cells, as shown in (3). When
ω = 0 it means that the two maps are completely dis-
tinct and when ω = 1 it means that the two maps are
completely identical.
ω(M1, M2) =
agr(M1, M2)
agr(M1, M2) + dis(M1, M2)
(3)
4.1 Case Study
In this case study, an incomplete map of the Univer-
sity of Malta Faculty of Engineering ground floor was
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
212

Figure 4: Ground truth map obtained by manually steering
the robot in the laboratory environment.
used, where three candidate locations were detected
by the frontier detection technique as shown in Figure
5. Candidate 3 shows a frontier that is made up of a
collection of connected smaller frontiers. This is due
to the diffused laser rays in that area which resulted in
several gaps of unknown cells between the free cells.
For this scenario, the ranking values of each approach
are tabulated in Table 1. In order to show how the
NBV approach can be used to rank candidates differ-
ently, the parameter λ was set to four different values
from the set {0.02, 0.15, 0.5, 1.0}.
Figure 5: Incomplete map of the University of Malta Fac-
ulty of Engineering ground floor showing three exploratory
candidates, together with the respective path length (in me-
tres) from the current robot pose and the expected unknown
area (in metres squared) that is visible from each candidate.
Table 1: Case Study results showing the value of the rank-
ing function for each candidate, {1, 2, 3}, where the ranking
function of the Nearest Frontier is the path length, which
must be minimized, and that of the NBV is g(q) as shown in
(1), which must be maximized. Note that the ranking value
of the chosen candidate for each approach is italicized.
Approach 1 2 3
Nearest Frontier 4.84 35.65 7.04
NBV λ = 0.02 23.70 40.55 144.1
NBV λ = 0.15 12.64 0.39 57.74
NBV λ = 0.5 2.33 1.49 ×10
−6
4.92
NBV λ = 1.0 0.21 2.67 ×10
−14
0.15
As can be seen in Table 1, the Nearest Frontier
approach chose Candidate 1 as the next exploratory
location since it offered the smallest path length. The
algorithm of interest is NBV. When the value of λ was
small (i.e. {0.02, 0.15, 0.5}), Candidate 3 was always
preferred since it offered the largest area of visibil-
ity even though it was not the closest location to the
robot. When λ was equal to 1.0, the algorithm pre-
ferred Candidate 1 since it is the location closest to the
robot. Hence, one can conclude that as the value of λ
increases, the NBV approach starts preferring candi-
dates that are closer to the current robot pose and thus,
this approach becomes similar to the Nearest Frontier
approach.
4.2 Completely Autonomous
Exploration and Mapping Results
In order to validate and compare the algorithms,
the whole system was used in a set of four ex-
periments where for each experiment, seven trials
were recorded. In each experiment, the robot au-
tonomously explored, navigated and mapped a con-
trolled environment (a laboratory) consisting of sev-
eral static obstacles such as desks and chairs. In
the first experiment the Nearest Frontier approach
was used while in the other three experiments, the
NBV approach was used with different values of
λ = {0.15, 0.5, 1.0}. These values of λ were cho-
sen heuristically depending on the visual inspection
of the robot behaviour. Figure 6 illustrates a typical
map resulting from one trial for each of the adopted
approaches while Table 2 presents the average (across
the seven trials in each experiment) acceptance index,
distance travelled and total exploration time for each
approach.
(a) Nearest Frontier (b) NBV λ = 0.15
(c) NBV λ = 0.5 (d) NBV λ = 1.0
Figure 6: Sample map results for each approach showing
the robot trajectory. ‘A’ and ‘B’ indicate the initial and final
robot poses respectively.
Autonomous Exploration and Mapping using a Mobile Robot Running ROS
213
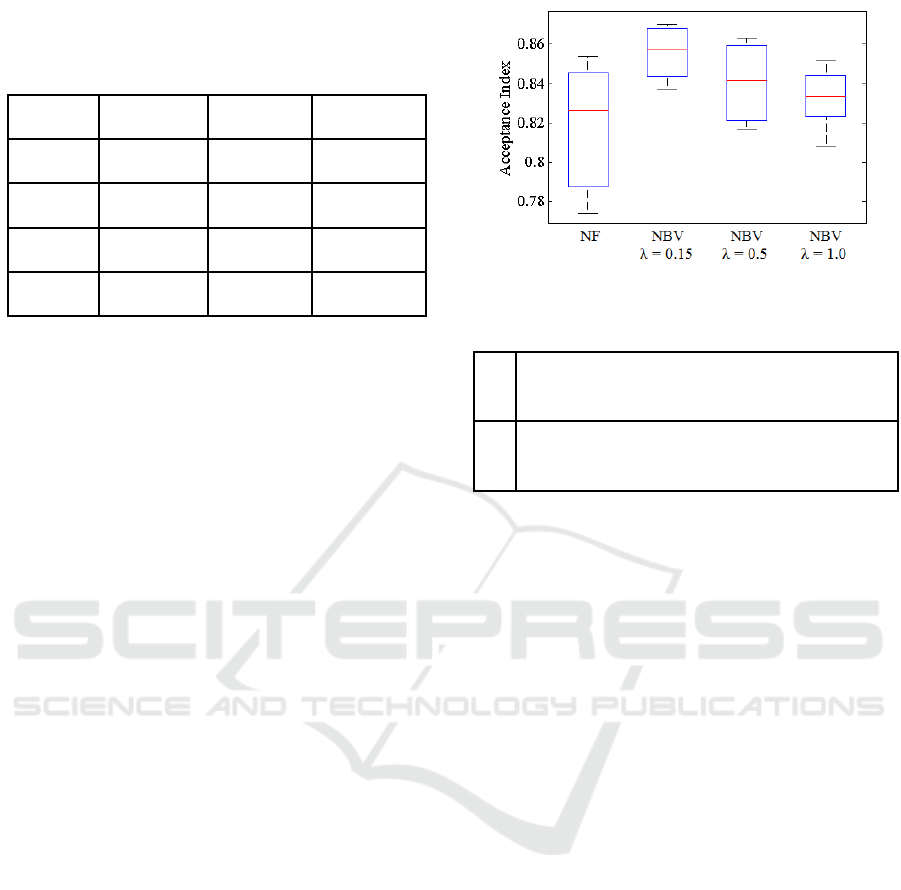
Table 2: Autonomous exploration and mapping results
showing the average acceptance index, average distance
travelled (metres) and the average exploration time for each
approach (seconds).
Acceptance
Index
Distance
Travelled
Exploration
Time
Nearest
Frontier
0.82 25.41 132.48
NBV
λ = 0.15
0.86 30.95 156.28
NBV
λ = 0.5
0.84 40.44 140.90
NBV
λ = 1.0
0.83 35.15 160.56
Visual inspection of the resulting maps, compared
to the ground truth map in Figure 4, and trajectories,
reveals that the Nearest Frontier approach keeps the
robot from visiting certain locations that are quite far
from its current pose. This then leads to unclear fea-
tures and regions in the map, as shown in Figure 6a.
On the other hand, in general, with the NBV approach
the robot seems to cover a larger portion of the envi-
ronment, hence leading to more accurate maps. It is
important to note that the two approaches are subject
to the same termination condition, specified in Sec-
tion 3, to end exploration. Furthermore, in this study,
although the focus is placed on the map accuracy, the
distance travelled by the robot and the total time of ex-
ploration were also recorded to analyse the efficiency
of the algorithms.
5 DISCUSSION
A question arises, of whether it is better to use a sim-
ple and fast exploratory algorithm like the Nearest
Frontier (NF) approach, or the more complex and less
time-efficient Next Best View (NBV) approach. To
evaluate the map accuracy objectively, the differences
between the acceptance indices of the seven trials for
each approach were statistically tested. The boxplot
in Figure 7 illustrates the distribution of these indices
for each of the four adopted approaches. Intuitively,
Figure 7 indicates that the best accuracy was obtained
by the NBV approach since this exhibited the high-
est mean and the smallest variance. However, as the
value of λ is increased, the NBV approach starts con-
verging towards the NF approach. This intuition was
verified statistically by using the One-Way ANOVA
hypothesis test, where the null (H
0
) and alternative
(H
1
) hypotheses were formed as shown in Table 3.
The main result of ANOVA reported that there
exists a significant difference in the acceptance in-
Figure 7: Boxplot of the acceptance index distributions.
Table 3: ANOVA statistical test: The Hypotheses.
H
0
The NF approach and the NBV approach
with λ = {0.15, 0.5, 1.0} all perform equally
well.
H
1
Some of the approaches have better perfor-
mance than the others in terms of map accu-
racy.
dex performance of the four experiments under test.
Hence, this means that H
0
was rejected. However,this
test does not reveal where the significant difference
occurs, and hence the Tukey HSD post-hoc test was
performed. The outcome of this test shows that while
there is a significant difference between the NF algo-
rithm and the NBV algorithm with λ = 0.15, there
is no significant difference among the other groups.
Since the mean of NBV with λ = 0.15 is larger than
that of NF, then the NBV approach with λ = 0.15
is significantly better than NF. Furthermore, the lack
of significant difference between NF and NBV with
λ = 0.5, and NF and NBV with λ = 1.0 indicates that
for higher value of λ the NBV algorithm converges
to the NF algorithm. One may argue that this is in
line with the theoretical expectations since as λ in-
creases, the NBV approach prefers the closer candi-
dates (i.e. shorter path lengths) over candidates that
offer a higher area of visibility. Furthermore, one
must note that the parameter λ is application-specific.
Thus, the threshold value at which the NBV algorithm
is not statistically different from the NF approach may
be different for different environments.
From the means tabulated in Table 2, one can im-
mediately identify a difference between the distance
travelled by the NF approach and the NBV approach.
This difference is also apparent in the time taken to
finish the exploration and mapping process. Although
such metrics have been used to compare different ex-
ploratory algorithms, it is important to note that in this
case, the distance travelled and the time taken do not
depend on just the adopted strategy. The actual dis-
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
214

tance travelled by the robot does not only depend on
the destination, but it also depends on the local tra-
jectories planned by the local path planner, which ac-
counts for the robot kinematic constraints. Hence, the
length of the travelled path is typically longer than
that which is considered as the global path, L(q, q
k
) in
both algorithms. Furthermore, the time taken to finish
the whole process does not only depend on the algo-
rithm or the distance travelled. It also depends on the
speed of the robot while it is navigating. This speed
may be reduced significantly if the robot passes close
to an obstacle, which is a precaution taken by the lo-
cal path planner in order to avoid collision with obsta-
cles. For these reasons, this study mainly focused on
the accuracy of the map obtained by the two different
algorithms which were implemented from scratch as
ROS packages for the first time.
6 CONCLUSIONS
In this paper, a modular design concept was used
in order to implement a robotic system that can au-
tonomously explore, navigate and map an unknown
environment in ROS. Furthermore, this work con-
tributes a new package to the ROS community. This
package consists of the implementation of two explo-
ration algorithms which can be used independently
of the navigation and the SLAM components. More-
over, the experimental evaluation of the Nearest Fron-
tier (NF) and the Next Best View (NBV) approach re-
vealed that in general, the NBV approach produces
more accurate maps than the NF approach. Further-
more, from this study one can also conclude that as
the parameter λ in the NBV approach is increased, the
NBV algorithm converges to the NF approach. More-
over, the results clearly confirm that the best choice
of an exploration strategy, is highly dependent on the
problem at hand and the environment in question.
REFERENCES
Amigoni, F. (2008). Experimental evaluation of some ex-
ploration strategies for mobile robots. In IEEE In-
ternational Conference on Robotics and Automation
(ICRA), 2008, pages 2818–2823.
Burgard, W., Stachniss, C., Grisetti, G., Steder, B., Kum-
merle, R., Dornhege, C., Ruhnke, M., Kleiner, A., and
Tard´os, J. D. (2009). A comparison of SLAM algo-
rithms based on a graph of relations. In IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems, (IROS)., pages 2089–2095.
Carlone, L., Du, Jingjing, K., Ng, M., Bona, B., and Indri,
M. (2014). Active SLAM and exploration with parti-
cle filters using Kullback-Leibler Divergence. Journal
of Intelligent and Robotic Systems, 75(2):291–311.
Carpin, S. (2008). Fast and accurate map merging for multi-
robot systems. Autonomous Robots, 25(3):305–316.
Dechter, R. and Pearl, J. (1985). Generalized best-first
search strategies and the optimality of A*. Journal
of the ACM (JACM), 32(3):505–536.
Dijkstra, E. W. (1959). A note on two problems in connex-
ion with graphs. Numerische mathematik, 1(1):269–
271.
Dissanayake, G., Huang, S., Wang, Z., and Ranasinghe, R.
(2011). A review of recent developments in Simul-
taneous Localization and Mapping. In 6th Interna-
tional Conference on Industrial and Information Sys-
tems, pages 477–482.
Fox, D., Burgard, W., Thrun, S., et al. (1997). The
Dynamic Window Approach to collision avoidance.
IEEE Robotics & Automation Magazine, 4(1):23–33.
Gonzalez-Ba˜nos, H. H. and Latombe, J.-C. (2002). Naviga-
tion strategies for exploring indoor environments. The
International Journal of Robotics Research, 21(10-
11):829–848.
Grisetti, G., Stachniss, C., and W.Burgard (2007). Improved
techniques for grid mapping with Rao-Blackwellized
particle filters. IEEE Transactions on Robotics,
23(1):34–46.
Makarenko, A. A., Williams, S. B., Bourgault, F., and
Durrant-Whyte, H. F. (2002). An experiment in inte-
grated exploration. In Proc. of the IEEE/RSJ Int. Conf.
on Intelligent Robots and Systems, (IROS), pages 534–
539.
Stachniss, C., Grisetti, G., and Burgard, W. (2005).
Information gain-based exploration using rao-
blackwellized particle filters. In Robotics: Science
and Systems, volume 2, pages 65–72.
Stentz, A. (1994). Optimal and efficient path planning for
partially-known environments. In Proc. of IEEE In-
ternational Conference on Robotics and Automation,
1994., pages 3310–3317.
Thrun, S., Burgard, W., and Fox, D. (2005). Probabilistic
robotics, chapter 10, pages 309 – 330. MIT press.
Thrun, S., Montemerlo, M., Koller, D., Wegbreit, B., Ni-
eto, J., and Nebot, E. (2004). FastSLAM: An efficient
solution to the simultaneous localization and mapping
problem with unknown data association. Journal of
Machine Learning Research, 4(3):380–407.
Yamauchi, B. (1997). A frontier-based approach for au-
tonomous exploration. In IEEE International Sympo-
sium on Computational Intelligence in Robotics and
Automation, 1997., pages 146–151.
Autonomous Exploration and Mapping using a Mobile Robot Running ROS
215
