
Statistical Modeling and Calibration of Triangulation Lidars
Anas Alhashimi, Damiano Varagnolo and Thomas Gustafsson
Control Engineering Group, Department of Computer Science, Electrical and Space Engineering,
Luleå University of Technology, Luleå 97187, Sweden
Keywords:
Maximum Likelihood, Least Squares, Statistical Inference, Distance Mapping Sensors, Lidar, Nonlinear
System, AIC.
Abstract:
We aim at developing statistical tools that improve the accuracy and precision of the measurements returned
by triangulation Light Detection and Rangings (Lidars). To this aim we: i) propose and validate a novel model
that describes the statistics of the measurements of these Lidars, and that is built starting from mechanical
considerations on the geometry and properties of their pinhole lens - CCD camera systems; ii) build, start-
ing from this novel statistical model, a Maximum Likelihood (ML) / Akaike Information Criterion (AIC) -
based sensor calibration algorithm that exploits training information collected in a controlled environment; iii)
develop ML and Least Squares (LS) strategies that use the calibration results to statistically process the raw
sensor measurements in non controlled environments. The overall technique allowed us to obtain empirical
improvements of the normalized Mean Squared Error (MSE) from 0.0789 to 0.0046.
1 INTRODUCTION
Lidars are ubiquitously used for mapping purposes.
Different types of Lidar technologies, such as Time
of Flight (ToF) and triangulation, have different sta-
tistical performance. For example, ToF Lidars have
generically lower bias and measurement noise vari-
ances than triangulation ones. At the same time, trian-
gulation Lidars are generally cheaper than ToF ones.
The market pull is then to increase the performance of
cheaper Lidars in a cost-effective way.
Improving the accuracy and precision of sensors
can then be done in different ways, e.g., by improv-
ing their mechanical properties. In this paper we have
a precise target: improve the performance indexes of
triangulation Lidars by removing their biases and ar-
tifacts through opportune statistical manipulations of
the raw information coming from the sensor.
The following literature review analyzes a set of
algorithms that are related to our aim.
Literature Review. It is convenient to categorize
the algorithms in the existing and relevant literature
as:
• procedures for the characterization or calibration
of the devices. Here characterization means a
thorough quantification of the measurement nois-
iness of the device, while calibration means an
algorithm that aims at diminishing this noisiness
level;
• when dealing with calibration issues, procedures
for the intrinsic or extrinsic calibration. Here
intrinsic means that the focus is on estimating
the parameters of the Lidar itself, while extrinsic
means that the focus is on estimating the parame-
ters resulted from sensor positioning and installa-
tion.
Characterization issues: several papers discuss
Lidar characterization issues for both ToF (Kneip
et al., 2009; Reina and Gonzales, 1997; Lee and
Ehsani, 2008; Sanz-Cortiella et al., 2011; Tang et al.,
2009; Tuley et al., 2005; Ye and Borenstein, 2002;
Anderson et al., 2005; Alhashimi et al., 2015) and tri-
angulation Lidars (Lima et al., 2015; Campos et al.,
2016). Notice that, at the best of our knowledge, for
triangulation Lidars there exist only two manuscripts:
(Lima et al., 2015), that discusses the nonlinearity of
Neato Lidars, and (Campos et al., 2016), that analyzes
the effect of the color of the target on the measured
distance. Importantly, (Lima et al., 2015) models non-
linear effects on the measurements and the variance
of additive measurement noises as two independent
effects that can be modeled with a second order poly-
nomials on the actual distance. From a statistical per-
spectives the authors, therefore, decouple the learning
process into two separate parts.
308
Alhashimi, A., Varagnolo, D. and Gustafsson, T.
Statistical Modeling and Calibration of Triangulation Lidars.
DOI: 10.5220/0005965803080317
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 1, pages 308-317
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Calibration issues: as for the calibration issues
there is a relatively large number of papers describing
how to calibrate extrinsic parameters either using ad-
ditional sensors (such as cameras) (Zhang and Pless,
2004b; Mei and Rives, 2006; Jokinen, 1999; Tidde-
man et al., 1998), or just requiring knowledge on the
motion of the Lidar itself (Andreasson et al., 2005;
Wei and Hirzinger, 1998; McIvor, 1999; Zhang and
Pless, 2004a).
Still considering calibration issues, there has been
also a big effort on how to perform intrinsic cali-
bration for multi-beam Lidar systems, where the re-
sults from one beam is used to calibrate the intrinsic
parameters of other beams (Chen and Chien, 2012;
Muhammad and Lacroix, 2010; Atanacio-Jiménez
et al., 2011; Glennie and Lichti, 2010; Glennie and
Lichti, 2011; Glennie, 2012; Gordon and Meidow,
2013; Mirzaei et al., 2012; Gong et al., 2013; Park
et al., 2014). As for single-beam Lidar systems, in-
stead, (Mirzaei et al., 2012) proposes a method for
the intrinsic calibration of a revolving-head 3D Lidar
and the extrinsic calibration of the parameters with re-
spect to a camera. The technique involves an analyti-
cal method for computing an initial estimate for both
the Lidar’s intrinsic parameters and the Lidar-camera
transformation, that is then used to initialize an iter-
ative nonlinear least-squares refinement of all of the
calibration parameters.
We also mention the topic of on-line calibration of
sensor parameters for mobile robots when doing Si-
multaneous localization and mapping (SLAM), very
useful in navigation tasks. In this category, (Küm-
merle et al., 2011) proposes an approach to simulta-
neously estimate a map of the environment, the po-
sition of the on-board sensors of the robot, and its
kinematic parameters. These parameters are subject
to variations due to wear of the devices or mechanical
effects like loading. An other similar methodology for
the intrinsic calibration of depth sensor during SLAM
is presented in (Teichman et al., 2013).
Statement of Contributions. We focus specifically
on triangulation Lidars for robotic applications, and
aim to increase their performance in a cost-effective
way through statistical processing techniques. Our
long term vision is to arrive at a on-line automatic
calibration procedure for triangulation Lidars like
in (Kümmerle et al., 2011; Teichman et al., 2013);
before reaching this above long-term goal, we must
nonetheless solve satisfactorily the problem of cali-
brating triangulation Lidars off-line.
In this paper we thus:
• propose and assess a model for the measurement
process of triangulation Lidars (see Section 3 and
model (1)). Our model not only generalizes the
model proposed in (Lima et al., 2015; Campos
et al., 2016), but also motivates it starting from
mechanical and physical interpretations;
• on top of this model, propose and assess a ML
calibration procedure that uses data from a Mo-
tion Capture (MoCap) system. Importantly, our
calibration procedure extends the one proposed
in (Lima et al., 2015): there authors decoupled
the learning process into two separate stages (cor-
responding to estimate two different sets of pa-
rameters), while here the calibration is performed
simultaneously on both sets of parameters;
• propose and assess novel ML and LS strategies for
correcting the measurements from the sensor with
the model inferred during the calibration stage.
As reported in (31) and (32), the overall strategy is
then shown to be capable to improve the normalized
MSE of the raw information from the sensor from
0.0789 to 0.0046.
1.1 Organization of the Manuscript
Section 2 describes the working principles of trian-
gulation Lidars. Based on these working principles,
Section 3 proposes a statistical model of the measure-
ment process of the device. Section 4 then validates
this statistical model using data acquired through a
MoCap system. Section 5 then presents a calibration
algorithm for sensors deployed in a test environment.
Section 7 eventually concludes the paper with the de-
scription of future research issues.
2 The Triangulation Lidar Range
Sensor
We now describe the functioning principle of the tri-
angulation scanners; this discussion will be useful
for explaining why the moments of the measurement
noise depend on the actual measured distance. More
details about the constructive details of triangulation
Lidars can be found in (Blais, 2004; Konolige et al.,
2008).
A prototypical triangulation Lidar is the one in
Figure 1. Its working principles are then explained
with the diagram in Figure 2 and its caption.
This simple working principle helps keeping the
cost of the sensor low
1
, and making it commercially
1
Incidentally, the sensor was costing $135.00 as of February
2016 in Ebay. Nonetheless, the original industrial goal was
to reach an end user price of $30.00.
Statistical Modeling and Calibration of Triangulation Lidars
309
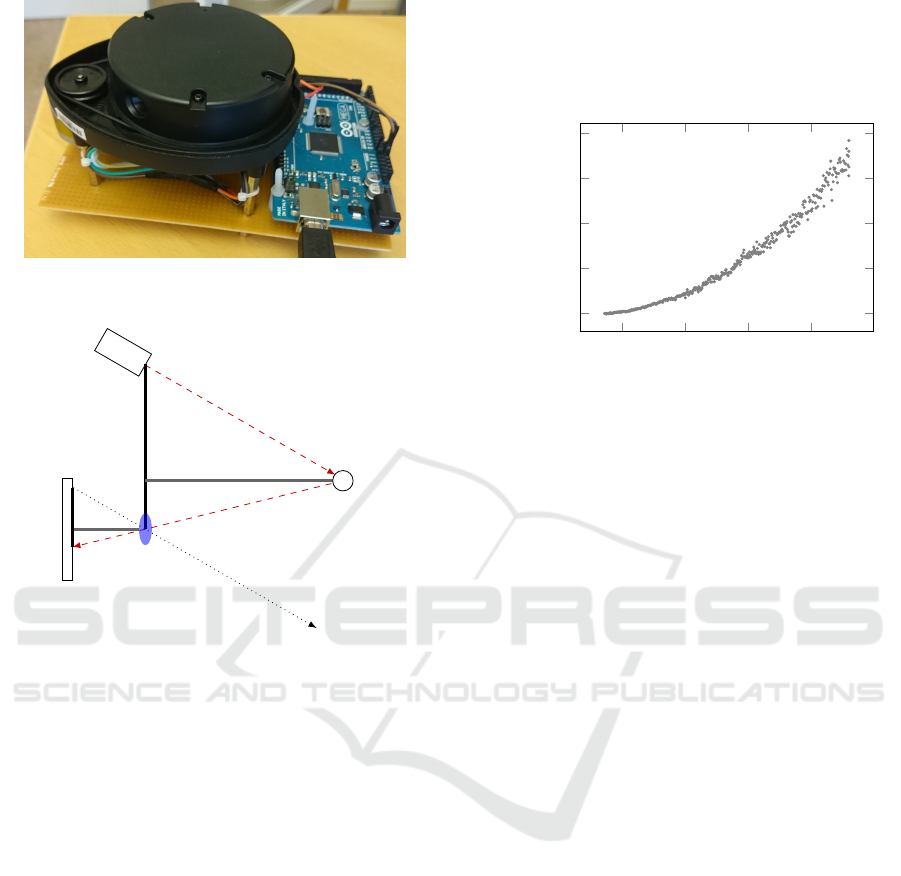
Figure 1: Photo of a triangulation Lidar.
laser beam
b
d
k
parallel of
the laser beam
d
0
b
0
k
laser
object
pinhole
camera
pinhole
lens
Figure 2: Diagram exemplifying the working principle of a
triangulation Lidar . The laser emits an infra-red laser signal
that is then reflected by the object to be detected. The beam
passes through a pinhole lens and hits a CCD camera sensor.
By construction, thus, the triangles defined by (b, d
k
) and by
(b
0
k
, d
0
) are similar: this means that the distance to the object
is nonlinearly proportional to the angle of the reflected light,
and as soon as the camera measures the distance b
0
k
one can
estimate the actual distance d
k
using triangles similarities
concepts.
usable in low-cost devices like robotic vacuum clean-
ers. The low cost of the sensor comes nonetheless
with some well-defined mechanical problems (Kono-
lige et al., 2008):
• low-cost lens, that generate nonlinear distortion
effects;
• imprecise pointing accuracy, that is known of at
best 6 degrees;
• not rigid physical linkages among lens elements,
camera, laser, and laser optics, that may suffer
from distortion effects during the life of the de-
vice.
As it can be seen in Figure 3, all these problems in-
duce measurement errors; more precisely, triangula-
tion Lidars suffer from strong nonlinearities in both
the bias and the standard deviation of the measure-
ment noise. This pushes towards finding some sig-
nal processing tools that can alleviate these problems,
and keep the sensor cheap while improving its perfor-
mance.
1 2 3 4
0
0.25
0.5
0.75
1
actual distance [m]
meaurements error [m]
Figure 3: Dataset.
3 A NOVEL STATISTICAL
MODEL FOR THE Lidar
MEASUREMENTS
Let y
k
be the k-th measurement returned by the Lidar
when the true distance is d
k
. Physically, y
k
is com-
puted by the logic of the sensor through a static trans-
formation of b
0
k
in Figure 2; we assume here that this
static transformation is unknown, that b
0
k
is not avail-
able, and that we want to improve the estimation for
d
k
from just y
k
.
Our ansatz for the whole transformation from d
k
to y
k
is then
y
k
= f (d
k
) + f (d
k
)
2
e
k
(1)
where
• f (·) is an unknown non-linear function;
• e
k
∼ N
0, σ
2
e
is a Gaussian and white additive
measurement noise.
In the following Section 3.1 we motivate the presence
of f (·) from mechanical considerations, while in the
following Section 3.2 we motivate the presence of the
f (·)
2
multiplying the noise e
k
starting from physical
considerations.
3.1 Explaining the Presence of the
Nonlinear Term f (·) in Model (1)
The nonlinear term f (·) in (1) is related to what is
called the radial distortion in camera calibration liter-
ature (Zhang, 2000; Weng et al., 1992; Brown, 1964;
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
310

Duane, 1971). Indeed camera lenses are notoriously
nonlinear at their borders, with this nonlinearity in-
creasing as the light beam passes closer to the lens
edges. In our settings this thus happens when targets
are very close or very far.
Radial distortions are usually modeled in the cam-
era calibration literature as a series of odd powers, i.e.,
as
f (d
k
) =
n
∑
i=0
α
i
d
2i+1
k
(2)
where the α
i
’s are the model parameters.
As numerically shown during the validation of (1)
in Section 4, model (2) does not describe well the ev-
idence collected in our experiments. Indeed the spe-
cific case of triangulation Lidars lacks of the symme-
tries encountered in computer vision settings (see (4)
and the discussion on that identity), and thus in our
settings there is no need for odd symmetries in the
model (in other words, doubling d does not lead to
doubling b
0
). We thus propose to remove this con-
straint and use a potentially non-symmetric polyno-
mial, i.e.,
f (d
k
) =
n
∑
i=0
α
i
d
i
k
. (3)
The numerical validations of model (3) shown in Sec-
tion 4 confirm then our physical intuition.
3.2 Explaining the Presence of the
Multiplicative Term f (d
k
)
2
in
Model (1)
Assume for now that there are no lens-distortion ef-
fects. The similarity between the triangles in Figure 2
then implies
d
k
b
=
d
0
b
0
k
. (4)
In (4) d
k
and b
0
k
are generally time-varying quanti-
ties, while b and d
0
are constants from the geome-
try of the Lidar. Assume now that the quantity mea-
sured by the CCD at time k is corrupted by a Gaussian
noise, so that z
k
= b
0
k
+ w
k
with w
k
∼ N
0, σ
2
CCD
and σ
2
CCD
constant and independent of d
k
. Thus
z
k
∼ N
b
0
k
, σ
2
CCD
; since
y
k
=
bd
0
z
k
, (5)
assuming a Gaussian measurement noise on the CCD
implies that y
k
is a reciprocal Gaussian r.v. This kind
of variable is notoriously difficult to treat (e.g., their
statistical moments cannot be derived from closed
form expressions starting from the original Gaussian
variables). For this reason we perform a first order
Taylor approximation of the nonlinear map (5) above.
In general, if
z
k
∼ N
b, σ
2
y
k
= φ(z
k
)
(6)
then the first order Taylor approximation of the distri-
bution of y
k
is (Gustafsson, 2010, (A.16))
y
k
∼ N
φ(b), φ
0
(b)
2
σ
2
(7)
where φ
0
(·) is the first derivative of φ(·) w.r.t. z
k
. Sub-
stituting the values of our specific problem into for-
mula (7) leads then to the novel approximated model
y
k
∼ N
bd
0
b
0
k
,
−bd
0
b
02
k
2
σ
2
CCD
!
, (8)
or, equivalently,
y
k
= d
k
+ d
2
k
e
k
e
k
∼ N
0, σ
2
e
(9)
where σ
2
e
=
σ
2
CCD
b
2
d
02
is a scaled version of σ
2
CCD
inde-
pendent of d
k
and to be estimated from the data.
Consider now that actually there are some lens
distortion effects that imply the presence of the non-
linear term f (d
k
). We can then repeat the very same
discussion above, and obtain model (1) by substitut-
ing d
k
with f (d
k
) in (9).
4 VALIDATION OF THE
APPROXIMATION (8)
The approximation introduced by the first order Tay-
lor expansion in (8) can be seen as arbitrary. Nonethe-
less we show in this section that on the collected
datasets it actually corresponds to the most powerful
approximation in a statistical sense.
To this aim we perform this two-step validation:
1. (check if the noises are independent and identi-
cally distributed (iid) and normal) perform a nor-
mality test on the y
k
’s assuming that measure-
ments are collected at a fixed distance (i.e., d
k
is
constant): indeed e
k
is approximately Gaussian as
much as y
k
is;
2. (check the order of the term multiplying e
k
) com-
pare the following alternative statistical models
for the measurements y
k
:
H
0
: y
k
= f (d
k
) + e
k
H
1
: y
k
= f (d
k
) + f (d
k
)e
k
H
2
: y
k
= f (d
k
) + f (d
k
)
2
e
k
H
3
: y
k
= f (d
k
) + f (d
k
)
3
e
k
(10)
and check which one describes better the collected
information.
Statistical Modeling and Calibration of Triangulation Lidars
311

As for point 1 we can use standard iid tests
(like the Wald-Wolfowitz runs (Croarkin and Tobias,
2006)) and standard normality tests (like the Shapiro-
Wilk normality test). These tests performed on our
registered data showed p-values of 0.56 and 0.42, so
we can safely consider the measurement noises to be
iid and Gaussian.
As for point 2, we instead consider the following
strategy: for every model above, assuming that mea-
surements are collected at a fixed distance (i.e., d
k
is
constant), we can perform a simple algebraic manip-
ulation of (1) to obtain
y
k
− y
k−1
f (d
k
)
?
= e
k
− e
k−1
(11)
where ? indicates the order of the model (that means
? ∈
{
0, . . . , 3
}
). (11) in its turn indicates that, since e
k
and e
k−1
are assumed iid,
y
k
− y
k−1
f (d
k
)
?
∼ N
0, 2σ
2
e
, ? ∈
{
0, . . . , 3
}
. (12)
Assume now that the dataset is composed by dif-
ferent batches each corresponding to d
k
’s that are con-
stant in the batch, but different among batches. More-
over assume that each batch is sufficiently rich to
make it is possible to estimate with good confidence
the unknown f (d
k
) through the empirical mean of the
y
k
relative to that batch. By combining the informa-
tion from different batches it is then possible to check
which model ? describes better the measured infor-
mation.
Indicate then with B the number of batches in the
dataset, with b = 1, . . . , B the index of each batch, and
with B
b
the set of k’s that are relative to that specific
batch b. In formulas, we thus:
1. estimate, for each model batch b = 1, . . . , B, the
distance
b
f
b
=
1
|B
b
|
∑
k∈B
b
y
k
; (13)
2. estimate, for each model ? = 0, . . . , 3, the variance
of e
k
as
c
σ
2
e
:
=
1
B
B
∑
b=1
1
2|B
b
|
∑
k,k−1∈B
b
y
k
− y
k−1
b
f
?
b
!
2
.
(14)
3. compute, for each model ? = 0, . . . , 3, the log-
likelihood of the data as
−log P
h
y
y
y ; d
d
d,
c
σ
2
e
i
=
B
∑
b=1
|B
b
|log
b
f
2?
b
c
σ
2
e
+
B
b
∑
k=1
y
k
−
b
f
b
2
b
f
2?
b
c
σ
2
e
(15)
where y
y
y
:
= [y
1
, . . . , y
N
]
T
and d
d
d
:
= [d
1
, . . . , d
N
]
T
.
In Figure 4 we then show the log-likelihoods for
the different models. As it can be seen, hypothesis H
2
is the one that best describes the collected evidence.
H
0
H
1
H
2
H
3
6
7
8
·10
4
P
h
y
y
y ; d
d
d,
c
σ
2
?
i
Figure 4: Evaluation of (15) on the collected datasets.
A non rigorous (but graphical and intuitive) argu-
ment supporting H
2
as the hypothesis best describing
the evidence is then the one offered in Figure 5. The
argument goes as follows: for the exact ? ∈
{
0, . . . , 3
}
the quantities
y
k
− y
k−1
f (d
k
)
?
? ∈
{
0, . . . , 3
}
. (16)
should be iid independently of d
k
. This iid-ness is
indeed a necessary condition for iid-ness of the mea-
surement noises (one of our assumptions).
Since f (·) is actually unknown, this iid-ness test
must be performed by means of some estimate of
f (·). In the following we use the estimator defined
in Section 5 over an experiment where we manually
increase the true distance d
k
. As it can be seen, the
hypothesis H
2
is the unique one for which the quan-
tities
y
k
− y
k−1
b
f (d
k
)
?
are homoscedastic. Thus the normal-
izing factor ? = 2 is the unique one guaranteeing iid-
ness for the measurement noises. Notice that this ar-
gument is a non rigorous wishful thinking, since we
use some estimates as the ground truth; nonetheless
the heteroscedasticity of the noises for ? = 0, 1, 3 in-
dicates that these hypotheses are non-descriptive.
5 CALIBRATING THE Lidar
Our overall goal is not just to propose the statistical
model (1) describing the measurement process of the
Lidar but also to find a calibration procedure for es-
timating the unknowns f (·) and σ
2
e
from some col-
lected information.
Once again the long term goal is to calibrate (1)
on-line and continuously using information from
other sensors like odometry, ultrasonic sensors, etc.
Instrumental to this future direction we now solve the
first step, that is to estimate f (·) and σ
2
e
from a dataset
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
312

y
k
− y
k−1
y
k
− y
k−1
b
f (d
k
)
y
k
− y
k−1
b
f (d
k
)
2
2 3 4
distance [m]
y
k
− y
k−1
b
f (d
k
)
3
Figure 5: Plots of the quantities
y
k
− y
k−1
b
f (d
k
)
?
for ? = 0, . . . , 3
and for increasing d
k
and for
b
f (·) computed as in Section 5.
The results graphically suggest that
b
f (d
k
)
2
is the unique
normalizing factor for which we obtain homoscedastic sam-
ples.
D =
{
y
k
, d
k
}
in which we know d
k
(e.g., thanks to a
MoCap system).
Given our Fisherian setting, we seek for the ML
estimate for both f (·) and σ
2
e
, where we recall that
(due to the radial distortion hypothesis as the source
of f (·), see Section 3.1) f (·) is modeled as a non-
symmetric polynomial, i.e., as f (d
k
) =
∑
n
i=0
α
i
d
i
k
as
in (3). Since now model (1) implies
y
k
− f (d
k
) ∼ N
0, f (d
k
)
4
σ
2
e
, (17)
it follows immediately that the corresponding nega-
tive log-likelihood is proportional to
L
:
= log(det Σ) +
y
y
y − f
f
f (d
d
d)
T
Σ
−1
y
y
y − f
f
f (d
d
d)
(18)
where
• y
y
y
:
= [y
1
, . . . , y
N
]
T
;
• d
d
d
:
= [d
1
, . . . , d
N
]
T
;
• f
f
f (d
d
d)
:
= [ f (d
1
), . . . , f (d
N
)];
• Σ
:
= diag
f (d
1
)
4
σ
2
e
, . . . , f (d
N
)
4
σ
2
e
.
Finding the ML estimates in our settings thus
means:
1. solving
argmin
θ∈Θ
L (θ) (19)
for several different n, with
θ
:
=
α
0
, . . . , α
n
, σ
2
e
(20)
and Θ the set of θ ∈ R
n+1
for which σ
2
e
> 0;
2. deciding which n is the best one using some model
order selection criterion, e.g., AIC.
Unfortunately problem (19) is not convex, so it
neither admits a closed form solution nor it can be
easily computed using numerical procedures. Solving
problem (19) is thus numerically difficult. Keeping
in mind that our long-term goal is the development of
on-line calibration procedures, where numerical prob-
lems will be even more complex, we strive for some
alternative calibration procedure.
5.1 An Approximate Calibration
Procedure
We here propose an alternative estimator that trades
off statistical performance for solvability in a closed
form. We indeed propose to seek an estimate for θ
in (20) by using the alternative model
y
k
= f (d
k
) + d
2
k
e
k
, (21)
that differs from (1) only for the fact that the noise is
multiplied by d
2
k
instead of f (d
k
)
2
. This approxima-
tion is intuitively meaningful, since f (d
k
) represents
a distortion term induced by the pinhole lens: ideally,
indeed, f (d
k
) should be equal to d
k
.
Assuming model (21) it is now possible do de-
rive a ML estimator of θ. Indeed dividing both sides
of (21) by d
2
k
we get
y
k
d
2
k
= g(d
k
) + e
k
(22)
where (cf. (3))
g(d
k
) =
n
∑
i=0
α
i
d
i−2
k
. (23)
This means that the estimation problem can be cast
as the problem of estimating the parameters α
α
α
:
=
[α
0
, . . . , α
n
]
T
and the noise variance σ
2
e
describing the
linear system
y
k
d
2
k
=
d
−2
k
. . . d
n−2
k
α
0
.
.
.
α
n
+ e
k
, (24)
for which the ML solution is directly
b
α
α
α =
H
T
H
−1
H
T
e
y
y
y
c
σ
2
e
=
1
N
e
y
y
y − H
b
α
α
α
T
e
y
y
y − H
b
α
α
α
(25)
Statistical Modeling and Calibration of Triangulation Lidars
313

with
H
:
=
d
−2
1
··· d
n−2
1
.
.
.
.
.
.
d
−2
N
··· d
n−2
N
e
y
y
y
:
=
y
1
d
2
1
.
.
.
y
N
d
2
N
. (26)
Notice that the procedure above does not deter-
mine the model complexity n. For inferring this pa-
rameter we then propose to rely on classical model
order selection criteria such as AIC.
5.2 Using the Calibration Results to
Estimate d
k
Once the sensor has been calibrated, i.e., a
b
α
α
α and
c
σ
2
e
have been computed, it is possible to invert the pro-
cess and use the learned information for testing pur-
poses. This means that given some measurements y
k
collected in an unknown environment we can, through
b
α
α
α and
c
σ
2
e
, estimate d
k
.
5.2.1 Computing the ML Estimate of d
k
Rewriting model (3) as
f (d
k
) = d
d
d
T
k
α
α
α d
d
d
k
:
=
d
0
k
d
1
k
.
.
.
d
n
k
(27)
and equating the score of y
k
parametrized by α
α
α and
σ
2
e
to zero leads to the equation
y
k
− d
d
d
k
α
α
α
y
k
− d
d
d
k
(I − K)α
α
α
= σ
2
e
d
4
k
(28)
with
K
:
= diag
0,
1
2
, . . . ,
n
2
. (29)
This means that estimating d
k
from y
k
,
b
α
α
α and
c
σ
2
e
can
be performed by solving (28) in d
k
after substituting
the real values α
α
α and σ
2
e
with their estimates.
Since polynomial (28) is quartic for n = 0, 1, 2,
and of order at least 6 for any other n, the ML estimate
for d
k
must then either rely on complex algebraic for-
mulas or numerical roots finding methods.
5.2.2 Computing the LS Estimate of d
k
Given our assumption (3) on the structure of f (·), and
given an estimate
b
f for f , the problem of estimating
d
k
from y
k
is the one of minimizing the squared loss
y
k
−
b
f (d
k
)
2
. Once again, the problem is of finding
the roots of a polynomial, since the solutions of the
LS problem above are directly
b
d
k
∈
n
e
d s.t. y
k
−
b
f
e
d
= 0
o
. (30)
Thus if the Lidar has heavy nonlinear radial distor-
tions (that means that it requires high order polynomi-
als f (·)) then one is again required to compute poly-
nomial roots.
Notice also that some of the roots above may not
belong to the measurement range of the sensor (e.g.,
some roots may be negative); these ones can safely
be discarded from the set of plausible solutions. The
other ones, instead, are equally plausible.
This raises a question on how to decide which root
should be selected among the equally plausible ones.
This question is actually non-trivial, and cannot be
solved by means of the frequentist approach used in
this manuscript. We thus leave this question unan-
swered for now, and leave it as a future research ques-
tion. Bayesian formulations will be explored to see if
they solve the multiple plausible roots problem.
6 NUMERICAL EXPERIMENTS
Our experiments consist of a robot with the Lidar
mounted on top moving with piecewise constant
speeds towards a target. We recorded several datasets
for training and testing purposes, consisting of the
Lidar measurements and a ground truth information
collected by a MoCap system (see Figure 6). Training
Figure 6: Experimental setup used for recording the dataset.
The Lidar was mounted over a Pioneer 3AT robot facing an
obstacle; the photo moreover shows some of the cameras of
the MoCap system.
datasets were thus initially used to estimate α
α
α and σ
2
e
as described in Equation (25). As for the model order
selection, we empirically detected that n = 2 was al-
ways the best choice when using AIC measures. E.g.,
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
314

0 1 2 3 4
5
0
0.25
0.5
0.75
1
actual distance [m]
measurement error [m]
training set
order 1
order 2
order 3
Figure 7: A typical training set collected in our experiments.
The plotted quantities correspond to the measurement errors
and to the polynomial models fitting these errors.
Table 1: AIC scores for the different models complexities
involved in the training set of Figure 7.
polynomial order AIC score
1 -5.774
2 -7.380
3 -5.824
4 -3.890
for the dataset shown in Figure 7 we obtained the AIC
scores reported in Table 1.
The estimated α
α
α and σ
2
e
were also used for testing
purposes to refine the estimate of the distances d
k
in
non-controlled environments. Notice that the selected
model order was always 2, so it was always possible
to solve the LS problem in a closed form and also
discard one of the roots in (30), so that the set of roots
was always a singleton. As shown in Figure 8,
b
d
k
is
much closer to d
k
than y
k
. For example, the empirical
normalized MSEs for the test set in Figure 8 were
1
N
N
∑
k=1
b
d
k
− d
k
2
k
d
k
k
2
= 0.0046, (31)
1
N
N
∑
k=1
k
y
k
− d
k
k
2
k
d
k
k
2
= 0.0789. (32)
7 CONCLUSIONS
We derived, starting from a combination of physical
and statistical considerations, a model that describes
the statistical behavior of the measurements returned
by triangulation Lidars. This statistical model, given
in (1), is based on two assumptions:
1. the effects of radial distortions in the pinhole lens
can be captured by means of a polynomial func-
tion;
0 1 2 3 4
5 6
0
1
2
3
4
5
6
actual distance [m]
measured distance [m]
test set
MoCap
estimated
Figure 8: Effects of the estimation procedure on the origi-
nal Lidar measurement. It can be noticed how the overall
strategy removes the nonlinearities induced by the pinhole
lens - CCD camera system.
2. the nonlinearities induced by the geometry of the
laser-CCD system can be captured by means of
a heteroscedastic noise which standard deviation
depends in first approximation quadratically with
the measured distance.
This model, validated through some experiments
on real devices, allows to build tailored triangulation
Lidars calibration strategies that follow the classical
training-testing paradigm:
• in the training phase, collect information in a con-
trolled environment and use it to estimate through
ML paradigms the parameters defining the statis-
tical behavior of the sensor;
• in the test phase, use this information and some
statistical inference techniques such as ML or LS
to correct the measurements from the sensor when
this is in a non-controlled environment.
It turns then out that both the ML and LS estima-
tion strategies may be numerically demanding, spe-
cially for sensors suffering from strong radial distor-
tions in the pinhole camera. In this case, indeed, the
estimators may require to use numerical root finding
procedures and lead to some computational disadvan-
tages.
Irrespectively of these issues, that can in any case
be mitigated by limiting the complexity of the polyno-
mials describing the radial distortions, the estimation
strategies above have been proved to be effective in
our tests. Real-life experiments indeed showed that
the techniques allow to reduce the empirical MSE of
the sensor of a factor 17.15.
Despite this promising result, the research asso-
ciated to triangulation Lidars is not finished. First
Statistical Modeling and Calibration of Triangulation Lidars
315

of all, the techniques should be modified so to be
implementable using recursive estimation schemes.
Moreover, by following a classical training-testing
approach, the techniques above present some limi-
tations. Different sensors may in fact differ even if
nominally being constructed in the same way. More-
over sensors may change their statistical behavior in
time, due to aging or mechanical shocks. This means
that techniques based on results from a controlled en-
vironment on just one sensor and just once are even-
tually not entirely meaningful.
A robust approach must indeed perform contin-
uous learning for each sensor independently in a
non-controlled environment by performing informa-
tion fusion steps, e.g., combining also information
from other sensors like odometry, ultrasonic and ac-
celerometers.
This information-fusion continuous-learning al-
gorithm nonetheless must be based on some prelim-
inary results on what are the statistical models of tri-
angulation Lidars and on how inference can be per-
formed on them. This paper can thus be seen as the
first step towards more evolved strategies.
REFERENCES
Alhashimi, A., Varagnolo, D., and Gustafsson, T. (2015).
Joint temperature-lasing mode compensation for time-
of-flight lidar sensors. Sensors, 15(12):31205–31223.
Anderson, D., Herman, H., and Kelly, A. (2005). Experi-
mental characterization of commercial flash ladar de-
vices. In International Conference of Sensing and
Technology, volume 2.
Andreasson, H., Triebel, R., and Burgard, W. (2005).
Improving plane extraction from 3d data by fusing
laser data and vision. In Intelligent Robots and
Systems, 2005.(IROS 2005). 2005 IEEE/RSJ Interna-
tional Conference on, pages 2656–2661. IEEE.
Atanacio-Jiménez, G., González-Barbosa, J.-J., Hurtado-
Ramos, J. B., Ornelas-Rodríguez, F. J., Jiménez-
Hernández, H., García-Ramirez, T., and González-
Barbosa, R. (2011). Lidar velodyne hdl-64e calibra-
tion using pattern planes. International Journal of Ad-
vanced Robotic Systems, 8(5):70–82.
Blais, F. (2004). Review of 20 years of range sensor devel-
opment. Journal of Electronic Imaging, 13(1).
Brown, D. C. (1964). An advanced reduction and calibra-
tion for photogrammetric cameras. Technical report,
DTIC Document.
Campos, D., Santos, J., Gonçalves, J., and Costa, P. (2016).
Modeling and simulation of a hacked neato xv-11
laser scanner. In Robot 2015: Second Iberian Robotics
Conference, pages 425–436. Springer.
Chen, C.-Y. and Chien, H.-J. (2012). On-site sensor re-
calibration of a spinning multi-beam lidar system us-
ing automatically-detected planar targets. Sensors,
12(10):13736–13752.
Croarkin, C. and Tobias, P. (2006). Nist/sematech
e-handbook of statistical methods.
NIST/SEMATECH, July. Available online:
http://www.itl.nist.gov/div898/handbook.
Duane, C. B. (1971). Close-range camera calibration. Pho-
togrammetric engineering, 37(8):855–866.
Glennie, C. (2012). Calibration and kinematic analysis of
the velodyne hdl-64e s2 lidar sensor. Photogrammet-
ric Engineering & Remote Sensing, 78(4):339–347.
Glennie, C. and Lichti, D. D. (2010). Static calibration and
analysis of the velodyne hdl-64e s2 for high accuracy
mobile scanning. Remote Sensing, 2(6):1610–1624.
Glennie, C. and Lichti, D. D. (2011). Temporal stability
of the velodyne hdl-64e s2 scanner for high accuracy
scanning applications. Remote Sensing, 3(3):539–
553.
Gong, X., Lin, Y., and Liu, J. (2013). 3d lidar-camera ex-
trinsic calibration using an arbitrary trihedron. Sen-
sors, 13(2):1902–1918.
Gordon, M. and Meidow, J. (2013). Calibration of a multi-
beam laser system by using a tls-generated reference.
ISPRS Annals of Photogrammetry, Remote Sensing
and Spatial Information Sciences II-5 W, 2:85–90.
Gustafsson, F. (2010). Statistical sensor fusion. Studentlit-
teratur,.
Jokinen, O. (1999). Self-calibration of a light striping sys-
tem by matching multiple 3-d profile maps. In 3-
D Digital Imaging and Modeling, 1999. Proceedings.
Second International Conference on, pages 180–190.
IEEE.
Kneip, L., Tâche, F., Caprari, G., and Siegwart, R. (2009).
Characterization of the compact hokuyo urg-04lx 2d
laser range scanner. In Robotics and Automation,
2009. ICRA’09. IEEE International Conference on,
pages 1447–1454. IEEE.
Konolige, K., Augenbraun, J., Donaldson, N., Fiebig, C.,
and Shah, P. (2008). A low-cost laser distance sen-
sor. In Robotics and Automation, 2008. ICRA 2008.
IEEE International Conference on, pages 3002–3008.
IEEE.
Kümmerle, R., Grisetti, G., and Burgard, W. (2011). Si-
multaneous calibration, localization, and mapping.
In Intelligent Robots and Systems (IROS), 2011
IEEE/RSJ International Conference on, pages 3716–
3721. IEEE.
Lee, K.-H. and Ehsani, R. (2008). Comparison of two 2d
laser scanners for sensing object distances, shapes,
and surface patterns. Computers and electronics in
agriculture, 60(2):250–262.
Lima, J., Gonçalves, J., and Costa, P. J. (2015). Modeling of
a low cost laser scanner sensor. In CONTROLO’2014–
Proceedings of the 11th Portuguese Conference on
Automatic Control, pages 697–705. Springer.
McIvor, A. M. (1999). Calibration of a laser stripe profiler.
In 3-D Digital Imaging and Modeling, 1999. Proceed-
ings. Second International Conference on, pages 92–
98. IEEE.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
316

Mei, C. and Rives, P. (2006). Calibration between a central
catadioptric camera and a laser range finder for robotic
applications. In Robotics and Automation, 2006. ICRA
2006. Proceedings 2006 IEEE International Confer-
ence on, pages 532–537. IEEE.
Mirzaei, F. M., Kottas, D. G., and Roumeliotis, S. I. (2012).
3d lidar–camera intrinsic and extrinsic calibration:
Identifiability and analytical least-squares-based ini-
tialization. The International Journal of Robotics Re-
search, 31(4):452–467.
Muhammad, N. and Lacroix, S. (2010). Calibration of a
rotating multi-beam lidar. In Intelligent Robots and
Systems (IROS), 2010 IEEE/RSJ International Con-
ference on, pages 5648–5653. IEEE.
Park, Y., Yun, S., Won, C. S., Cho, K., Um, K., and Sim, S.
(2014). Calibration between color camera and 3d lidar
instruments with a polygonal planar board. Sensors,
14(3):5333–5353.
Reina, A. and Gonzales, J. (1997). Characterization of a
radial laser scanner for mobile robot navigation. In
Intelligent Robots and Systems, 1997. IROS’97., Pro-
ceedings of the 1997 IEEE/RSJ International Confer-
ence on, volume 2, pages 579–585. IEEE.
Sanz-Cortiella, R., Llorens-Calveras, J., Rosell-Polo, J. R.,
Gregorio-Lopez, E., and Palacin-Roca, J. (2011).
Characterisation of the lms200 laser beam under the
influence of blockage surfaces. influence on 3d scan-
ning of tree orchards. Sensors, 11(3):2751–2772.
Tang, P., Akinci, B., and Huber, D. (2009). Quantification
of edge loss of laser scanned data at spatial discontinu-
ities. Automation in Construction, 18(8):1070–1083.
Teichman, A., Miller, S., and Thrun, S. (2013). Unsuper-
vised intrinsic calibration of depth sensors via slam.
In Robotics: Science and Systems. Citeseer.
Tiddeman, B., Duffy, N., Rabey, G., and Lokier, J. (1998).
Laser-video scanner calibration without the use of a
frame store. In Vision, Image and Signal Processing,
IEE Proceedings-, volume 145, pages 244–248. IET.
Tuley, J., Vandapel, N., and Hebert, M. (2005). Analysis
and removal of artifacts in 3-d ladar data. In Robotics
and Automation, 2005. ICRA 2005. Proceedings of the
2005 IEEE International Conference on, pages 2203–
2210. IEEE.
Wei, G.-Q. and Hirzinger, G. (1998). Active self-calibration
of hand-mounted laser range finders. Robotics and
Automation, IEEE Transactions on, 14(3):493–497.
Weng, J., Cohen, P., and Herniou, M. (1992). Camera cal-
ibration with distortion models and accuracy evalua-
tion. IEEE Transactions on Pattern Analysis & Ma-
chine Intelligence, 14(10):965–980.
Ye, C. and Borenstein, J. (2002). Characterization of a 2-d
laser scanner for mobile robot obstacle negotiation. In
ICRA, pages 2512–2518.
Zhang, Q. and Pless, R. (2004a). Constraints for heteroge-
neous sensor auto-calibration. In Computer Vision and
Pattern Recognition Workshop, 2004. CVPRW’04.
Conference on, pages 38–38. IEEE.
Zhang, Q. and Pless, R. (2004b). Extrinsic calibration
of a camera and laser range finder (improves cam-
era calibration). In Intelligent Robots and Systems,
2004.(IROS 2004). Proceedings. 2004 IEEE/RSJ In-
ternational Conference on, volume 3, pages 2301–
2306. IEEE.
Zhang, Z. (2000). A flexible new technique for camera cal-
ibration. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 22(11):1330–1334.
Statistical Modeling and Calibration of Triangulation Lidars
317
