
Evaluating SRAM as Source for Fingerprints and Randomness
on Automotive Grade Controllers
Bogdan Groza, Pal-Stefan Murvay and Tudor Andreica
Department of Automatics and Applied Informatics, Politehnica University of Timisoara, Timisoara, Romania
Keywords:
Physical Fingerprinting, Randomness, SRAM.
Abstract:
It is well known that the state of uninitialized SRAM provides a unique pattern on each device due to physical
imperfections. Both the affinity toward some fixed state as well as the deviation from it can be successfully
exploited in security mechanisms. Fixed values provide an efficient mechanism for physical identification and
for extracting cryptographic keys while the randomness of bits that flip can be exploited as input for PRNGs
that are vital for the generation of ephemeral keys. In this work we try to give an assessment of these two ca-
pabilities on several state-of-the art automotive grade embedded platforms. The security of embedded devices
inside vehicles has gained serious attention in the past years due to the impact of emerging technologies, e.g.,
self-driving cars, vehicle-to-vehicle communication, which are futile in the absence of the appropriate secu-
rity mechanisms. Our examination of several state-of-the-art automotive grade controllers shows that SRAM
can offer sufficient entropy and patterns for identification but careful testing is needed as some models fail to
provide the expected results.
1 INTRODUCTION AND
MOTIVATION
Recent experimental research (Checkoway et al.,
2011), (Koscher et al., 2010) showed vehicles to be
trivial targets in front of determined adversaries. This
line of comprehensive academic research was pre-
ceded or followed by several other works in which a
plethora of vehicular subsystems were attacked, e.g.,
wireless keys (Ishtiaq Roufa et al., 2010), (Verdult
et al., 2012), (Wetzels, 2014), (Shoukry et al., 2013),
(Tillich and Wójcik, 2012), (Francillon et al., 2011),
wireless tire sensors (Verdult et al., 2012), the ABS
braking system (Shoukry et al., 2013), etc. Recent
surveys are done in (Miller and Valasek, 2014) and
(Studnia et al., 2013).
Security tools for alleviating these problems exist,
e.g., cryptographic protocols, but they do require the
existence of some capabilities that may be absent in
automotive grade controllers. Random number gen-
erators are one such resource that is not to be found
in several automotive grade platforms, e.g., none of
state-of-the-art devices that we target in the follow-
ing sections has such functionality. Adding peripheral
circuitry is not always an option as it increases pro-
duction costs. The automotive industry is highly sen-
sitive to financial issues as devices are usually repli-
cated in many thousands or even millions of copies.
In terms of performance, automotive embedded
devices could be compared with earlier mobile de-
vices for which the problem of randomness gen-
eration was previously aproached (Krhovjak et al.,
2009). However, the main randomness sources em-
ployed in these cases (i.e. microphone and camera
input) are not generally available in automotive Elec-
tronic Control Units (ECUs).
Randomness is not the only desired functionality.
The capability of uniquely identifying a device is vi-
tal as well as extracting a key that was not previously
stored in the non-volatile memory. This opens road
for physical identification of a device and for build-
ing cryptographic protocols that rely on keys that are
harder to extract and do not require an a-priori setup.
A more comprehensive discussion on such applica-
tions will follow.
The idea of using SRAM state as source for fin-
gerprinting devices or for generating randomness was
first explored by Holcomb et al. (Holcomb et al.,
2007), (Holcomb et al., 2009). At the same time,
it was noted by Guajardo et al. (Guajardo et al.,
2007a), (Guajardo et al., 2007b), that physical un-
clonable characteristics can be used for assuring Intel-
lectual Property (IP) protection, e.g., unique patterns
derived from the device characteristics can be used as
Groza, B., Murvay, P-S. and Andreica, T.
Evaluating SRAM as Source for Fingerprints and Randomness on Automotive Grade Controllers.
DOI: 10.5220/0005966401090120
In Proceedings of the 13th International Joint Conference on e-Business and Telecommunications (ICETE 2016) - Volume 4: SECRYPT, pages 109-120
ISBN: 978-989-758-196-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
109

encryption/decryption keys making the software us-
able only on the device that has the prescribed char-
acteristics. A survey on various sources behind Phys-
ically Unclonable Functions (PUFs) can be found in
(Maes and Verbauwhede, 2010), another overview is
available in (Rührmair and Holcomb, 2014).
While the idea of using SRAM state is not new,
here we target a distinct class of application and pro-
vide experimental results on platforms that to the best
of our knowledge were not subject to previous analy-
sis, i.e., automotive grade controllers. We begin with
a brief overview of potential applications in the auto-
motive domain.
1.1 Target Automotive Scenarios
To emphasize on the relevance of our analysis for au-
tomotive applications, here we outline three scenarios
that are target of our current and future work:
(i) Random Number Generators. The state-of-the-
art is generous in providing sources for ran-
domness. Oscillator drifts, the noise of Zen-
ner diodes, ring oscillators, etc. can be used as
sources of entropy. However, there are many
automotive embedded boards that do not have
such sources for garnering entropy. Moreover,
adding extra-circuitry is not always allowed and
it clearly increases the production costs which
is not desired by manufacturers. A relevant
example is the Tire Pressure Monitoring Sys-
tem (TPMS) which uses miniature sensors that
are placed inside the tire. Previous work (Ish-
tiaq Roufa et al., 2010) has shown this system
to have vulnerabilities that can easily lead to
several attacks: eavesdropping, vehicle track-
ing, battery drainage, message modification,
etc. The academic community was quick to re-
act with proposals, e.g., (Xu et al., 2013) and
(Solomon and Groza, 2015), while the industry
proves to be aware too (Toth, 2014). Unfortu-
nately, the results presented in (Xu et al., 2013)
are on an Arduino based platform which is not
at all similar in terms of capabilities with real-
world sensors (that are far more constrained).
One of the most frequently used platform in
TPMS systems, i.e., the Infineon SP37 from
(Solomon and Groza, 2015) which is also in-
cluded in our study, has no extra-circuitry for
generating randomness. In the absence of a se-
cure RNG, all the protocols proposed in (Xu
et al., 2013), (Solomon and Groza, 2015) are
void of practical significance. Consequently,
one of the objectives of our work is to study
the security of the randomness extracted from
SRAM cells by providing concrete measure-
ments. In case of the SP37 sensor, our results
show that the entropy that can be extracted is not
high mostly due to the small size of the available
RAM.
(ii) ECU Fingerprinting. A common problem faced
by the automotive industry is the illegal re-
placement of various ECUs (Electronic Con-
trol Units) inside the car. E.g., by simply re-
placing the BCM (Body Control Module) one
can gain access to the car with a distinct car
key that is paired to the newer BCM. Stor-
ing some cryptographic keys inside the non-
volatile memory of the genuine ECU and later
use it for authentication is not a solution in case
that the adversary can gain access to this non-
volatile memory and copy it to a counterfeit
ECU. Cloning the software from one ECU to an-
other one will make these ECUs indistinguish-
able from the software level. However, using
the SRAM state as a fingerprint can be a re-
alistic mean to decide if a particular ECU is
indeed the genuine one. As part of the diag-
nosis systems (a standardized functionality in-
side a car) each ECU can be requested to exter-
nalize a unique fingerprint which can be stored
by the manufacturer (or some authorized third-
party) for subsequent verification. In Figure 1
we make a suggestive depiction for such a pro-
tocol. To remove the need for a more demand-
ing protocol, we assume that the ECU regis-
tration procedure is done in a secure environ-
ment (indeed, this should be the case in prac-
tical scenarios). During the registration stage,
each ECU externalizes a fingerprint, i.e., several
bytes from the uninitialized SRAM, to the OBD
(On-board Diagnosis Tool) which further sends
them to an OEM (Original Equipment Manu-
facturer) server where the fingerprint is stored.
To make the ECU cooperate and externalize the
fingerprint, the OBD tool first sends a request
req which is signed by the OEM along with a
time-stamp t
req
to enforce freshness. The signa-
ture of the OEM s
OEM
= Sign
OEM
req,t
req
is
used to enforce only authorized sessions to ac-
quire this fingerprint. The ECU then external-
izes the fingerprint F
ECU
along with its identi-
fier id
ECU
which are signed by the OBD tool and
sent to the OEM server. Later, for ECU identi-
fication, we rely on fuzzy cryptography as the
fingerprint extracted from the ECU may present
small variations when compared to the original
one. First, the ECU sends its identification num-
ber id
ECU
and some random value rnd
ECU
. Then
SECRYPT 2016 - International Conference on Security and Cryptography
110

the OBD tool sends a value that is encrypted
with the fingerprint enc
F
ECU
(rnd
ECU
,rnd
OBD
)
and the helper data H
F
ECU
which will be used
to compensate for the noise in the new finger-
print. The ECU proves its identity by success-
fully decrypting the random value rnd
OBD
. The
encrypted challenge enc
F
ECU
(rnd
ECU
,rnd
OBD
)
can be of course generated by either the OBD
tool by acquiring the fingerprint F
ECU
from the
OEM or by the OEM itself.
ECU registration (Secure Environment)
1. OBD → ECU: req,t
req
,s
OEM
= Sign
OEM
req,t
req
2. ECU → OBD: id
ECU
,F
ECU
3. OBD → OEM: id
ECU
,F
dev
,s
OBD
=
Sign
OBD
(id
ECU
,F
dev
)
ECU identification (Insecure Environment)
1. ECU → OBD: id
ECU
,rnd
ECU
2. OBD → ECU: H
F
ECU
,enc
F
ECU
(rnd
ECU
,rnd
OBD
)
3. ECU → OBD: rnd
ECU
,rnd
OBD
Figure 1: Suggestive depiction of component registration
and subsequent identification based on fingerprint.
(iii) Generation of unique cryptographic keys. There
are numerous devices inside the car which need
to operate with a unique cryptographic key. A
good example are wireless car keys (RF keys)
which despite being produced in thousands of
identical copies need to be seeded with unique
cryptographic keys (to avoid impersonation).
Many other examples can be envisioned, but
car keys are one of the most intensively stud-
ied vehicular device both in terms of practical
instances, e.g., (Verdult et al., 2012), (Wetzels,
2014), (Shoukry et al., 2013), (Tillich and Wój-
cik, 2012), (Francillon et al., 2011) or crypto-
graphic designs (Biham et al., 2008). Using
memory patterns offers an excellent alternative
to build an per-item unique key without specific
programming of the device, i.e., the uniqueness
of the key is simply guaranteed by the unique-
ness of the memory pattern. In Figure 2 we
make a suggestive depiction for a protocol in-
tended for key registration and subsequent ac-
cess to the car, this procedure is of course simi-
lar to the ECU fingerprinting. First an OBD tool
initializes the BCM (Body Control Module) to
accept the fingerprint from an RF key F
dev
. The
fingerprint is sent by the RF key along with its
identification number id
RFKey
. Again, to remove
the need for a more demanding protocol, we as-
sume that the key registration procedure is done
in a secure environment. For subsequent authen-
tication, the BCM sends a random challenge
rnd
BCM
which is coupled with the challenge
from the key rnd
RFKey
and encrypted with the
fingerprint F
0
dev
(note that F
0
dev
may have some
bits affected by noise in comparison with the
original F
dev
) as enc
F
0
dev
rnd
RFKey
,rnd
BCM
.
For successful decryption and verification from
the BCM, this is send along with helper data
H
F
dev
.
Key registration (Secure Environment)
1. OBD → BCM: req,t
0
,Sign
OEM
(req,t
0
)
2. RFKey → BCM: id
RFKey
,F
dev
Authentication (Insecure Environment)
1. RFKey → BCM: rnd
RFKey
2. BCM → RFKey: rnd
BCM
3. RFKey → BCM: H
F
dev
, enc
F
0
dev
rnd
RFKey
,rnd
BCM
Figure 2: Suggestive depiction of key registration and sub-
sequent authentication based on fingerprint.
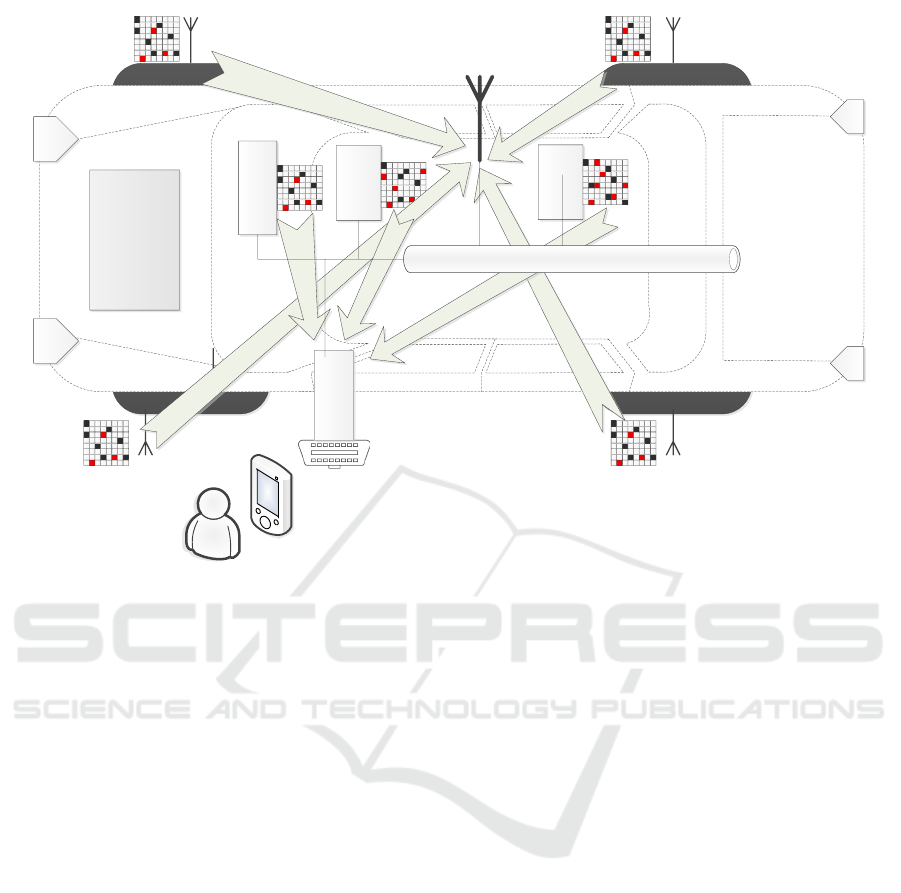
These applications are graphically suggested in
Figure 3. The protocol depictions in Figures 1 and 2
are mere suggestions as it should be clear that prac-
tical adoption demands both standardization and a
more rigorous security analysis. But before that, in or-
der to test the feasibility of these ideas we need some
experimental measurements for the quality of SRAM
in providing the desired entropy and unique patterns.
This is the main goal of our work.
Our work is organized as follows. In Section 2
we provide a brief overview on the automotive grade
controllers that we put to test. Section 3 provides an
overview of the mathematical tools that we use for the
evaluation while section 4 provides the experimental
data.
2 DEVICES AND TECHNICAL
DETAILS
We begin by presenting the devices that are target of
our experiments, these are specifically chosen to meet
a large variety of automotive applications. Then we
proceed to presenting some technical details on how
memory dumps were performed on each of the de-
vices.
Evaluating SRAM as Source for Fingerprints and Randomness on Automotive Grade Controllers
111
LF/HF Receiver
Wheel Sensor (Infineon SP37T) Wheel Sensor (Infineon SP37T)
(Infineon SP37T) Wheel SensorWheel Sensor (Infineon SP37T)
LF/HF Antenna
Instrumet
Cluster
BCM
Engine
Control
Diagnosis
Module
Generate Random Session Key
Generate Random Session Key
Generate Fingerprint
Generate Random Session Key
Generate Fingerprint
Generate Fingerprint
Generate Random Session Key
Controller Area Network (CAN)
Figure 3: Suggestive depiction of our target automotive applications: generating randomness and ECU fingerprinting (memory
cells depicted as constant zeros (white), ones (black) or flipping (red).
2.1 Target Devices
The chosen microcontrollers cover the major device
categories employed in the automotive industry in
terms of available resources and processing power.
We now enumerate through these platforms and also
give hints on the target automotive scenario for each
of them:
(i) INFINEON SP37. This device represents the
low-end of the hierarchy, an application specific
integrated circuit built for tire pressure sensing
around an 8-bit 8051 core. The SP37 sensor has
a RAM memory that is limited to 256 bytes.
Due to inherent constraints on this platform
both fingerprinting and generating randomness
are important functionalities for the applications
where this sensor is deployed.
(ii) FREESCALE S12 FAMILY. From the 16-bit
category we selected three members of the
S12 microcontroller family: MC9S12C128 ,
MC9S12DT256 and MC9S12XDP512 . They
are all built on the same S12 architecture with
the last one having an additional coprocessor
called XGATE. In terms of available RAM the
three platforms have 4KB, 12KB and respec-
tively 40KB of RAM. Members of this family
are suited for vehicle body components with av-
erage performance needs.
(iii) TEXAS INSTRUMENTS MSP FAMILY. Another
16-bit candidate included in our study is the
MSP430F2274 from Texas Instruments which
can be used in various vehicle body and info-
tainment applications. While members of the
MSP430 family can have up to 8KB of RAM,
our device features a memory of 1KB.
(iv) RENESAS RL78 FAMILY. The RL78/F14 is a
16-bit microcontroller from Renesas. It is used
in various automotive applications such as mo-
tor and body control, etc. The R5F10PPJ core
that we tested is equipped with a 20KB RAM
memory.
(v) INFINEON TRICORE FAMILY. In the high-end
32-bit microcontroller area we looked at the In-
fineon TriCore family and selected two devices,
TC1782 and TC1797 designed for demanding
applications in the powertrain domain. They
both integrate the same TriCore 1.3.1 core us-
ing a total of 176KB of RAM and an addi-
tional coprocessor for peripheral management
with 16KB of RAM. The total RAM avail-
able is comprised of several sections of mem-
ory with various roles. We only used dumps
SECRYPT 2016 - International Conference on Security and Cryptography
112

from those RAM areas which are not used as
caches. The RAM associated with the main pro-
cessor is called Local Data RAM (LDRAM) and
has a size of 124KB that could be increased to
128KB if the data cache is not used. The main
core makes use of a program memory inter-
face with a 24KB Scratch-Pad RAM (SPRAM)
which could go up to 40KB if reducing the in-
struction cache size. The program memory unit
holds an additional 8KB of RAM called Over-
lay RAM. Finally, the 16KB of RAM associ-
ated with the coprocessor is called Parameter
RAM (PRAM). TC1782 features ECC (Error-
Correcting Code) protection for the RAM mem-
ories. Therefore, it is necessary to have the
RAM initialised to get a reliable working ECC.
If the initial state of the ECC-protected mem-
ory is undefined the system will report and try to
correct bit errors that are erroneously detected.
(vi) OTHER PLATFORMS. Two additional platforms
from Freescale were also part of our study:
S12ZVHY64 and MPC5606B. They too have
ECC protected RAM but due to the way in
which the error protection mechanism is im-
plemented, the RAM on these platforms is not
suitable for fingerprinting or as randomness
sources. On the S12ZVHY64, the first access
to an uninitialised RAM location leads to the
initialization of that area before the read data is
returned. In the case of the MPC5606B a read
from the uninitialised RAM generates an error
interrupt which leads to a reset making it im-
possible to read the actual random data from the
memory. These are just two examples of devices
on which ECC protection prevents the access
to the raw RAM data after power-on reset but
similar situations can be encountered on various
other platforms.
Table 1 briefs over the employed platforms by also
specifying the size of available RAM on each.
2.2 Technical Details
We used two approaches for reading out the RAM
content from the selected microcontrollers. The first
one is based on the debugger interface while the sec-
ond one uses serial communication.
The debugger interface was used for all platforms
where the corresponding debugger software provided
features for saving the content of the entire memory
areas. For this, a debugger connection was established
following a hard-reset with or without downloading of
object code (program download to flash was avoided
where RAM areas were used as buffers during the
flashing process). Program execution was stopped
at the first instruction that allowed breakpoint setting
and at this point the content of RAM was read and
saved for processing. The applications residing on
the microcontrollers were in all cases limited to just
the most basic system initialization. This approach
was used for the MSP430 and TriCore platforms.
Some debugger software products do not offer the
possibility of dumping the content of memory areas
to a file. This was the case for the debuggers used
for the S12 and SP37 platforms. To address this, we
implemented a small application that read the content
of the RAM and sent it through a serial interface to
a PC on which the dump files were built. This com-
promised the initial content of several bytes in RAM
which were needed for program execution. The com-
promised memory locations were not included in the
analysis.
For each of the devices in our study, 100 mem-
ory dumps were taken for the analysis. Increasing the
number of samples from 50 to 100 did not lead to sig-
nificant changes in the results, thus we considered 100
samples to be a sufficient amount.
3 TESTING METHODOLOGY
AND RESULTS
We begin by a brief overview of the mathematical
tools behind our evaluation. We then proceed to the
measurements achieved for each of the devices.
3.1 Mathematical Tools
We now give a formal treatment of the mathemati-
cal tools that we use in our quantitative assessment
of SRAM for providing fingerprints and randomness.
We denote as fingerprint F
dev
of device dev, one fixed
memory dump of the device which is the set of all val-
ues m for the ` memory locations taken into account ,
i.e.,
F
dev
= {m
dev
0
,m
dev
0
,...,m
dev
`
}
We do define the memory state S
i
dev
of device dev
in each subsequent experiment i ∈ [1..e] as:
S
i
dev
= {m
dev
0
,m
dev
0
,...,m
dev
`
}
Over all the experiments space, for any pair of de-
vices dev
0
,dev
00
we can now define two random vari-
ables which are of relevance to our analysis: the intra-
distance between distinct memory mappings of the
same device and the inter-distance between memory
mappings of two devices. That is,
Evaluating SRAM as Source for Fingerprints and Randomness on Automotive Grade Controllers
113

Table 1: Automotive grade platforms subject of our study.
Device Architecture Frequency RAM size Manufacturer
SP37 8 bit 12MHz 256B Infineon
MC9S12C128 16 bit 50 MHz 4KB Freescale
MC9S12DT256 16 bit 50 MHz 12KB Freescale
MC9S12XDP512 16 bit 80 MHz 20KB Freescale
MSP430F2274 16 bit 16 MHz 1KB Texas Instruments
RL78/F14 32 bit 64 MHz 20KB Renesas
TC1782 32 bit 180 MHz 176KB Infineon
TC1797 32 bit 180 MHz 176KB Infineon
(i) the intra-distance is the Hamming distance be-
tween memory mappings of device dev
0
and the
fingerprint F
dev
0
of device dev
0
, defined as a ran-
dom variable over all e experiments:
I
dev
0
= Hamming(F
dev
0
,S
i
dev
0
),∀i ∈ [1..e]
(ii) the inter-distance is the Hamming distance be-
tween the memory mappings of device dev
00
and
the fingerprint F
dev
0
of device dev
0
, defined as a
random variable over all e experiments:
E
dev
0
,dev
00
= Hamming(F
dev
0
,S
i
dev
00
),∀i ∈ [1..e]
The intra-distance and inter-distance are useful
measurements for establishing the quality of finger-
prints that can be extracted from the device.
For assessing the quality of random sequences and
the entropy that results we need to measure the guess-
ing probability and entropy for each cell. These are
defined as follows:
(iii) let memory cell m
i
(taken as byte) of device dev
be a random variable over the experiment space,
the guessing probability of memory cell m
i
on
device dev is defined as the maximum probabil-
ity that cell m
i
takes a particular value, i.e.,
γ
dev
(m
i
) = max
{
Pr[m
i
= v] : v ∈ {0..255}
}
1
(iv) by definition, the minimum entropy of mem-
ory cell m
i
is log
2
(1/γ
dev
(m
i
)) and consequently
we define the minimum entropy that can be ex-
tracted from the memory of device dev as the
sum of entropies for all the memory cells, i.e.,
H
dev
=
∑
i=1,`
log
2
(1/γ
dev
(m
i
))
To account for potential manufacturing problems
between devices of the same type, we do measure the
Hamming distance between adjacent cells as well as
the distance between cells of extreme behaviour. For
the later, we take into account both bits of low entropy
1
The equation considers 8-bit memory cells.
and high entropy, where by low or high we define bits
that are greater or equal in value to one standard devi-
ation from the mean.
Let γ
dev
be the random variable that denotes the
guessing probability of an arbitrary memory cell from
device dev. Having the mean µ(γ
dev
) and variance
Var(γ
dev
), let the following two set of indexes defined
over the guessing probabilities of each cell of device
dev:
I
low
dev
=
n
i : γ(m
dev
i
) ≤ µ(γ
dev
) + Var(γ
dev
)
o
I
high
dev
=
n
i : γ(m
dev
i
) ≥ µ(γ
dev
) + Var(γ
dev
)
o
Let, λ,Λ denote the cardinalities of the sets defined
above I
low
dev
and I
high
dev
, then:
(v) we define the set of successive distances be-
tween locations of extreme cells with low or
high entropy on device dev as:
L
low
dev
=
n
d : d ← min (|x
i−1
− x
i
|,|x
i
− x
i+1
|),
i = 2..λ−1, x
i
∈ I
low
dev
o
L
high
dev
=
n
d : d ← min (|x
i−1
− x
i
|,|x
i
− x
i+1
|),
i = 2..Λ−1, x
i
∈ I
high
dev
o
(vi) we define the set of Hamming distances between
pairs of adjacent cells on device dev as:
H
dev
=
n
d : d ← Hamming(m
dev
2∗i
,m
dev
2∗i+1
),
∀i ∈ [1..`/2]
o
The Hamming distances between pairs of adjacent
cells, while trivial to define, proved to be a very rel-
evant metric as at least two devices that yield good
entropy values later failed on this metric. Thus the
metric proves to be a very good sanity check.
SECRYPT 2016 - International Conference on Security and Cryptography
114

3.2 Experimental Data
The experimental results are obtained by analyzing
100 consecutive memory dumps on each of the de-
vices. For fingerprints, we used the first 64, 128 and
256 bits from the memory. By taking bytes located at
the end of the memory the results remained the same
as taking bytes from the beginning. The rest of the
analysis, i.e., guessing probability and entropy, was
done on the full memory dump over the entire set of
100 experiments.
(i) (ii)
(iii)
Figure 4: Experimental results on an MC9S12XDP512 :
intra-distance (i), inter-distance (ii) and the two combined
(iii) - measured as % for a larger fingerprint of 512 bits.
FINGERPRINTING. The results were satisfactory
on most of the devices, with isolated abnormalities
on which we defer the discussion for the forthcom-
ing paragraph. The complete experimental results are
shown in Table 2. For fingerprinting, memory dumps
from the same device show a variation for the mean of
the intra-distance µ(I
dev
0
) from 2.35% to 6.36% on all
of the Freescale S12 cores. When compared between
distinct devices the mean inter-distance µ(E
dev
0
,dev
00
)
ranged from 45.12% up to 51.73% which shows a
clear cut between the intra and inter-distances. This
allows an exact identification of the device from a
small fingerprint, e.g., 64-256 bit. Figure 4 shows the
plotted histogram for an MC9S12XDP512 core.
FINGERPRINT OVERLAPS FOR MSP430F2274 .
On the Texas Instruments platforms the results were
far from being satisfactory. The overlap between the
fingerprint from one device and another is high. The
mean of the intra-distance µ(I
dev
0
) is between 7.28%–
8.81% and the mean of the inter-distance µ(E
dev
0
,dev
00
)
between 31.90%–36.96% which shows that finger-
prints are statistically distinguishable. However, the
high variance which leads to clear overlaps suggests
that multiple memory dumps will be needed for cor-
rect identification. We are left without a clear ex-
planation for the source of this overlap and we can
imagine that distinct development boards equipped
with these cores may lead to distinct results. But for
the devices that we worked with, we are skeptical on
their potential practical use for this purpose. Figure 5
shows such an overlap for a 512 bit fingerprint, which
should be sufficiently large for practical demands but
still cannot lead to a clean cut between the intra and
inter-distance.
(i)
(ii)
(iii)
Figure 5: Experimental results on MSP430F2274 : intra-
distance (i), inter-distance (ii) and the two combined (iii) -
measured as % for a fingerprint of 512 bits.
f6 fb 62 ff bf de fc 44
ff f7 eb d7 ff fe f7 bf
37 ff f1 ff ff c7 5e bf
6d f6 65 af ff 6f bf eb
1b 18 10 20 20 60 80 2
0 0 80 1 0 15 91 68
97 0 a0 1 a0 4 11 24
0 0 82 54 81 1 3 a2
Figure 6: Biased chunks from un-initialized SRAM: 64 bits
at odd addresses (left) and 64 bits at even (right) addresses
on TC1782.
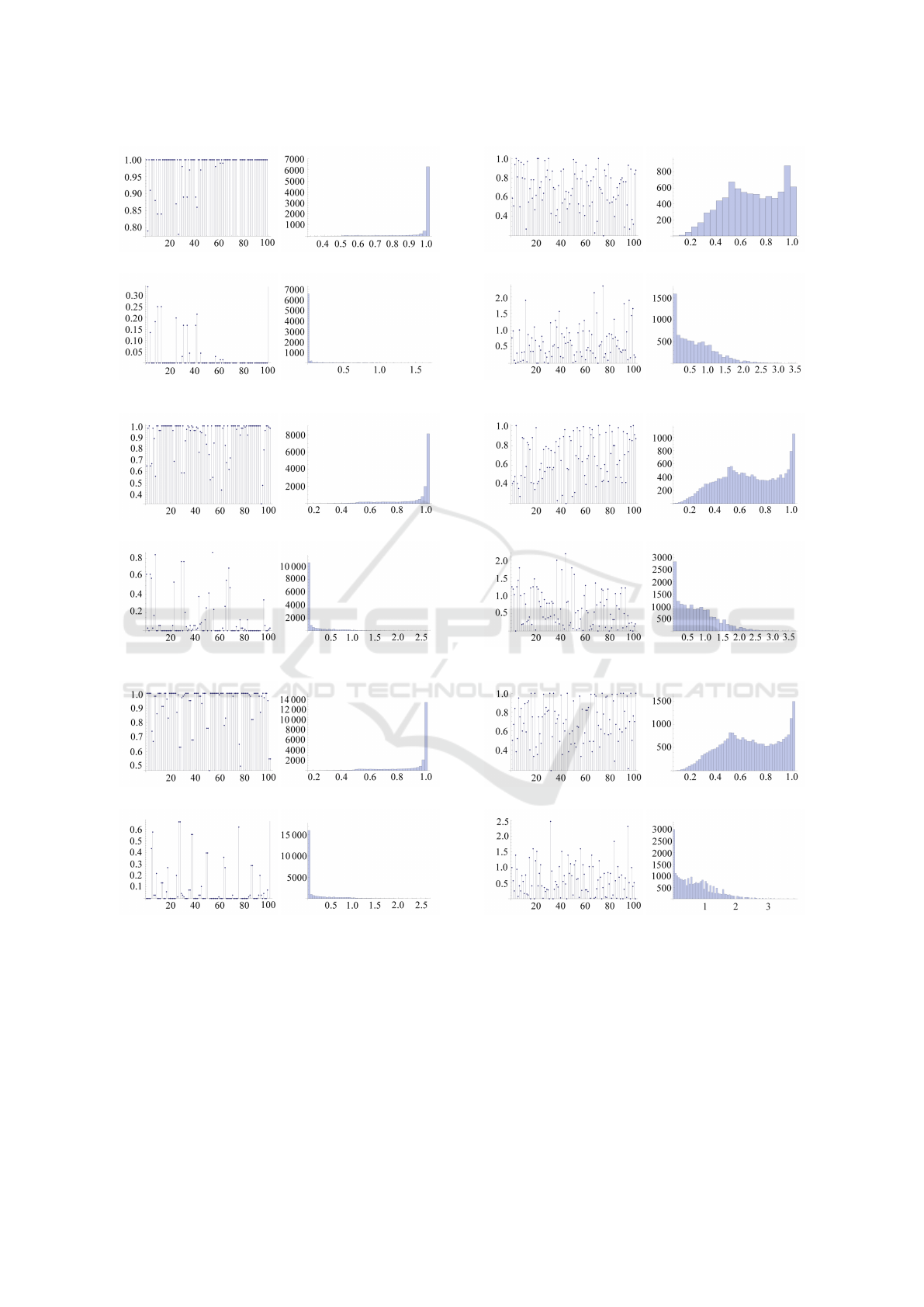
RANDOMNESS. The complete experimental re-
sults related to entropy are shown in Table 3 which
summarizes the mean and variance for the guess-
ing probability of each cell γ
dev
, the entropy of
each cell H
dev
and the hamming distances of ad-
jacent cells H
dev
. Graphical depictions are pro-
vided for the state of SRAM on each of the devices:
for MC9S12C128 and MC9S12DT256 in Figure 8,
Evaluating SRAM as Source for Fingerprints and Randomness on Automotive Grade Controllers
115

Table 2: Determined values for intra and inter-distances on the experimental devices (rows containing atypical results are
highlighted in gray).
Device Fingerprint Intra-distance Inter-distance
Size Mean Variance Mean Variance
|F
dev
| µ(I
dev
0
) Var(I
dev
0
) µ(E
dev
0
,dev
00
) Var(E
dev
0
,dev
00
)
MC9S12XDP512 64 bit 5.02% 5.15% 46.93% 7.72%
MC9S12XDP512 128 bit 5.61% 2.66% 45.40% 4.11%
MC9S12XDP512 256 bit 4.87% 1.12% 49.08% 1.78%
MC9S12DT256 64 bit 2.35% 2.52% 48.74% 5.57%
MC9S12DT256 128 bit 3.86% 2.33% 47.26% 3.36%
MC9S12DT256 256 bit 3.71% 1.10% 48.95% 1.64%
MC9S12C128 64 bit 4.95% 5.43% 45.12% 4.59%
MC9S12C128 128 bit 6.36% 5.04% 51.73% 2.85%
MC9S12C128 256 bit 5.35% 2.48% 47.91% 1.81%
RL78/F14 64 bit 5.36% 13.88% 46.40% 18.22%
RL78/F14 128 bit 5.62% 6.85% 50.25% 6.82%
RL78/F14 256 bit 5.64% 4.90% 48.53% 2.89%
MSP430F2274 64 bit 8.81% 123.57% 31.90% 81.35%
MSP430F2274 128 bit 7.28% 83.83% 35.21% 49.38%
MSP430F2274 256 bit 7.72% 72.91% 36.96% 39.25%
(i)
(ii)
(iii) (iv)
Figure 7: Distribution of bytes with dominant ones (red),
zeros (black) or half zeros half ones (white) for: (i)
MC9S12XDP512 , (ii) TC1797 , (iii) TC1782 and (iv)
MSP430F2274 .
MSP430F2274 in Figure 9, SP37 in Figure 10, for the
4 memory areas from TC1782 and TC1797 in Figures
11, 12, 13 and 14. In all of the previous figures, we
depict the guessing probability of consecutive mem-
ory cells in the upper left corner followed by the his-
togram for the distribution of guessing probabilities
on the right side. Then we depict the entropy of con-
secutive memory cells in the bottom left corner and
the histogram for the distribution of entropies on the
right side. All of the plots show similar distributions.
The entropy varied from 0.39 bits/byte in case of
the MC9S12C128 core up to 0.70bits/byte in case of
the TC1797 core. This amount of entropy should be
enough for devices equipped with sufficient memory.
However, for the case of the SP37 the results show
that the amount of entropy that can be collected is at
0.44 bits/byte leading to a total of around 53 bits of
entropy (assuming un-initialized RAM). This is likely
insufficient for generating cryptographic keys, fortu-
nately the other environmental data that sensor col-
lects can be used (acceleration, temperature, pressure,
etc.) and this may lead to sufficient entropy. Thus
the practical use of SRAM along with other sources
remains and alternative for the SP37 core. Due to
several abnormalities, the case of the TC1782 and
MSP430F2274 cores are separately discussed below.
With the exception of the previous two devices, the
hamming distance of adjacent cells is close to that of
random cells, having the mean at around 4 bits. These
distances are shown in the last two columns of Table
3.
BIAS ON TC1782 AND MSP430F2274 . A rather
unexpected result was achieved on Infineon TC1782 .
While the memory from TC1782 is of ECC type, we
expect that the entropy would be close to 0. This
happened with the PRAM, SPRAM and OVRAM.
However, for the LDRAM the entropy was higher
than for all of the other devices at 1.02 bits/byte.
SECRYPT 2016 - International Conference on Security and Cryptography
116

(i) (ii)
(iii) (iv)
MC9S12C128
(i) (ii)
(iii) (iv)
MC9S12XDP512
(i) (ii)
(iii) (iv)
MC9S12XDP512
Figure 8: Experimental results on the three controllers from
Freescale: guessing probability (i), guessing probability
distribution (ii) entropy (iii) and entropy distribution (iv).
This finding is however contrasted by the bit patterns
that could be found in the memory. Notably, bits
from 64-bit blocks at odd addresses showed a bias to-
ward 1, while bits in 64-bit blocks at even addresses
showed a bias toward 0. Figure 6 shows parts of a
memory dump and the bias is clearly visible. This
(i) (ii)
(iii) (iv)
MSP430F2274
Figure 9: Experimental results on TI RF2500: guessing
probability (i), guessing probability distribution (ii) entropy
(iii) and entropy distribution (iv).
(i)
(ii)
(iii)
(iv)
SP37
Figure 10: Experimental results on SP37 : guessing proba-
bility (i), guessing probability distribution (ii) entropy (iii)
and entropy distribution (iv).
shows that for the ECC memory on TC1782 , de-
spite the fact that bits do frequently changed their
state, there is a correlation between adjacent loca-
tions and thus there exists dependence between bytes.
For MSP430F2274 a similar bias was observed, how-
ever, according to the datasheet of the product it is
not equipped with ECC memory. A visual inspec-
tion of the memory dumps showed large portions
that are biased toward 1 followed by portions that
are biased toward 0. Figure 7 depicts these distribu-
tions for TC1782 and MSP430F2274 in contrast with
two cores that do appear to have random behaviour:
MC9S12XDP512 and TC1797 . Bytes with domi-
nant ones are colored in red, dominant zeros are black
while half-zero/half-one bytes are white. The patterns
are clearly not random. For the moment we are un-
able to find any explanation for this behaviour, but it
will stay in our focus for future work. We are how-
Evaluating SRAM as Source for Fingerprints and Randomness on Automotive Grade Controllers
117

Table 3: Determined values for guessing probability, entropy and Hamming distances of adjacent cells on the experimental
devices (rows containing atypical results are highlighted in gray).
Device Guessing (probability/byte) Entropy (bits/byte) Hamming (bits)
Mean Variance Mean Variance Adjacent Random
µ(γ
dev
) Var(γ
dev
) µ(H
dev
) Var(H
dev
) µ(H
dev
) µ(H
dev
)
MC9S12XDP512 0.78 0.04 0.41 0.20 3.98 4.00
MC9S12DT256 0.79 0.04 0.39 0.20 3.96 3.98
MC9S12C128 0.77 0.04 0.42 0.20 3.98 3.98
MSP430F2274 0.76 0.02 0.41 0.13 2.75 3.99
SP37 0.76 0.04 0.44 0.22 3.75 3.86
RL78/F14 0.73 0.04 0.51 0.23 3.62 4.00
TC1782 LDRAM 0.54 0.05 1.02 0.46 2.58 3.98
TC1782 PRAM 0.90 0.02 0.16 0.09 0.86 3.95
TC1782 SPRAM 0.90 0.02 0.17 0.10 0.93 4.03
TC1782 OVRAM 0.96 0.01 0.06 0.03 0.41 3.98
TC1797 LDRAM 0.70 0.04 0.59 0.28 3.93 3.99
TC1797 PRAM 0.65 0.05 0.70 0.34 3.89 3.98
TC1797 SPRAM 0.66 0.05 0.69 0.33 3.93 4.00
TC1797 OVRAM 0.68 0.05 0.64 0.30 3.87 3.99
(i) (ii)
(iii) (iv)
TC1782 - LDRAM
Figure 11: Null entropy cells (due to preloaded values) fol-
lowed by average entropy cells on the LDRAM of TriCore
TC1782: guessing probability (i), guessing probability dis-
tribution (ii) entropy (iii) and entropy distribution (iv).
ever pleased by the fact that the Hamming distance
of adjacent cells proved to be a marker that quickly
predicted this behavior. The result for the Hamming
distances of adjacent cells vs. randomly selected cells
are also depicted in Table 3. The distances between
cells of extreme values showed no abnormalities on
any of the devices, for this reason the experimental
values are not included.
(i) (ii)
(iii) (iv)
TC1797 - LDRAM
Figure 12: Constant entropy cells (due to preloaded code)
followed by average entropy cells on the LDRAM of In-
fineon TriCore TC1797: guessing probability (i), guessing
probability distribution (ii) entropy (iii) and entropy distri-
bution (iv).
4 CONCLUSION
Our work provides comprehensive results on the qual-
ity of SRAM for providing fingerprints and random-
ness on automotive grade controllers. The results
show that SRAM can be considered a good source
for both randomness and fingerprints but careful test-
ing is needed as the results are not uniform between
devices. Notable, the MSP430F2274 controllers that
we used do not appear to provide enough accuracy
SECRYPT 2016 - International Conference on Security and Cryptography
118
(i) (ii)
(iii) (iv)
TC1782 - OVRAM
(i) (ii)
(iii) (iv)
TC1782 - PRAM
(i) (ii)
(iii) (iv)
TC1782 - SPRAM
Figure 13: High guessing probability and lack of entropy
for OVRAM, PRAM and SPRAM on Infineon TriCore
TC1782: guessing probability (i), guessing probability dis-
tribution (ii) entropy (iii) and entropy distribution (iv).
for fingerprinting. As expected, the ECC memory of
devices such as the TC1782 controller is not a good
source for randomness. In particular for TC1782 con-
troller the entropy of certain portions of RAM was
high when strictly drawn from the state of each byte
(i) (ii)
(iii) (iv)
TC1797 - OVRAM
(i) (ii)
(iii) (iv)
TC1797 - PRAM
(i) (ii)
(iii) (iv)
TC1797 - SPRAM
Figure 14: Regular values for entropy on OVRAM, PRAM
and SPRAm for Infineon TriCore TC1797: guessing prob-
ability (i), guessing probability distribution (ii) entropy (iii)
and entropy distribution (iv).
after reset, but there was a high degree of correla-
tion between adjacent memory locations. We also
remark a similar bias between adjacent bytes for the
MSP430F2274 controllers.
Further investigations on the influence of environ-
Evaluating SRAM as Source for Fingerprints and Randomness on Automotive Grade Controllers
119

mental factors, e.g., temperature or electromagnetic
disturbances, on the state of SRAM are projected as
future work for us.
ACKNOWLEDGEMENT
This work was supported by a grant of the Romanian
National Authority for Scientific Research and Inno-
vation, CNCS-UEFISCDI, project number PN-II-RU-
TE-2014-4-1501 (2015-2017).
REFERENCES
Biham, E., Dunkelman, O., Indesteege, S., Keller, N., and
Preneel, B. (2008). How to steal cars–a practical at-
tack on keeloq. In EUROCRYPT, pages 1–18.
Checkoway, S., McCoy, D., Kantor, B., Anderson, D.,
Shacham, H., Savage, S., Koscher, K., Czeskis, A.,
Roesner, F., Kohno, T., et al. (2011). Comprehensive
experimental analyses of automotive attack surfaces.
In USENIX Security Symposium. San Francisco.
Francillon, A., Danev, B., Capkun, S., Capkun, S., and Cap-
kun, S. (2011). Relay attacks on passive keyless entry
and start systems in modern cars. In NDSS.
Guajardo, J., Kumar, S. S., Schrijen, G.-J., and Tuyls, P.
(2007a). FPGA intrinsic PUFs and their use for IP
protection. Springer.
Guajardo, J., Kumar, S. S., Schrijen, G.-J., and Tuyls, P.
(2007b). Physical unclonable functions and public-
key crypto for fpga ip protection. In Field Pro-
grammable Logic and Applications, 2007. FPL 2007.
International Conference on, pages 189–195. IEEE.
Holcomb, D. E., Burleson, W. P., and Fu, K. (2009). Power-
up sram state as an identifying fingerprint and source
of true random numbers. Computers, IEEE Transac-
tions on, 58(9):1198–1210.
Holcomb, D. E., Burleson, W. P., Fu, K., et al. (2007). Initial
sram state as a fingerprint and source of true random
numbers for rfid tags. In Proceedings of the Confer-
ence on RFID Security, volume 7.
Ishtiaq Roufa, R. M., Mustafaa, H., Travis Taylora, S. O.,
Xua, W., Gruteserb, M., Trappeb, W., and Seskarb,
I. (2010). Security and privacy vulnerabilities of in-
car wireless networks: A tire pressure monitoring sys-
tem case study. In 19th USENIX Security Symposium,
Washington DC, pages 11–13.
Koscher, K., Czeskis, A., Roesner, F., Patel, S., Kohno,
T., Checkoway, S., McCoy, D., Kantor, B., Anderson,
D., Shacham, H., et al. (2010). Experimental security
analysis of a modern automobile. In Security and Pri-
vacy (SP), 2010 IEEE Symposium on, pages 447–462.
IEEE.
Krhovjak, J., Matyas, V., and Zizkovsky, J. (2009). Gen-
erating random and pseudorandom sequences in mo-
bile devices. In Security and Privacy in Mobile Infor-
mation and Communication Systems, pages 122–133.
Springer.
Maes, R. and Verbauwhede, I. (2010). Physically unclon-
able functions: A study on the state of the art and
future research directions. In Towards Hardware-
Intrinsic Security, pages 3–37. Springer.
Miller, C. and Valasek, C. (2014). A survey of remote auto-
motive attack surfaces. Black Hat USA.
Rührmair, U. and Holcomb, D. E. (2014). Pufs at a glance.
In Proceedings of the conference on Design, Automa-
tion & Test in Europe, page 347. European Design and
Automation Association.
Shoukry, Y., Martin, P., Tabuada, P., and Srivastava,
M. (2013). Non-invasive spoofing attacks for anti-
lock braking systems. In Cryptographic Hardware
and Embedded Systems-CHES 2013, pages 55–72.
Springer.
Solomon, C. and Groza, B. (2015). Limon - lightweight
authentication for tire pressure monitoring sensors. In
1st Workshop on the Security of Cyber-Physical Sys-
tems (affiliated to ESORICS 2015).
Studnia, I., Nicomette, V., Alata, E., Deswarte, Y.,
Kaâniche, M., and Laarouchi, Y. (2013). Survey on
security threats and protection mechanisms in embed-
ded automotive networks. In Dependable Systems
and Networks Workshop (DSN-W), 2013 43rd Annual
IEEE/IFIP Conference on, pages 1–12. IEEE.
Tillich, S. and Wójcik, M. (2012). Security analysis of an
open car immobilizer protocol stack. In Trusted Sys-
tems, pages 83–94. Springer.
Toth, A. (2014). Method and system for monitoring a
parameter of a tire of a vehicle. EP Patent App.
EP20,120,464,019.
Verdult, R., Garcia, F. D., and Balasch, J. (2012). Gone in
360 seconds: Hijacking with hitag2. In Proceedings of
the 21st USENIX conference on Security symposium,
pages 37–37. USENIX Association.
Wetzels, J. (2014). Broken keys to the kingdom: Secu-
rity and privacy aspects of rfid-based car keys. arXiv
preprint arXiv:1405.7424.
Xu, M., Xu, W., Walker, J., and Moore, B. (2013).
Lightweight secure communication protocols for in-
vehicle sensor networks. In Proceedings of the 2013
ACM workshop on Security, privacy & dependability
for cyber vehicles, pages 19–30. ACM.
SECRYPT 2016 - International Conference on Security and Cryptography
120
