
Petri Net Modeling and Simulation of Walking Behaviour
for Design of a Bioinspired Robot Dog
Zuhal Erden
1
and Macit Araz
2
1
Department of Mechatronics Engineering, ATILIM University, Kizilcasar Mah., Incek, Ankara, Turkey
2
Micro-Electro-Mechanical Systems Research and Application Center, Middle East Technical University, Ankara, Turkey
Keywords: Behavioural Simulation, Petri Net, Bioinspired Design.
Abstract: Research in behavior-based design faces many challenges regarding the aids in conceptual design of
biorobots, representation of a biological system’s behavior in a well formed modeling tool and therefore
providing systematic transformation of this behavior into robot design. This paper reports a research that
focuses on the development of a Petri Net model to represent a biological system’s behavior. The model is
based on real time data collected from an experiment in which a dog is walking on a treadmill with a speed
of 1km/h. The model has the ability of simulating the real time rhythm of dog's walking behavior utilizing
colors and numbers as well as the step-by-step simulation. The aim is to observe the behavior of a walking
dog in time domain as an early stage of conceptual design of a bioinspired robot dog. Main challenge is to
develop a methodology to guide designer towards more creative designs based on bioinspired design ideas.
The presented work is an early attempt to initiate a systematic approach towards the stated goal.
1 INTRODUCTION
Bioinspired design methodology utilizes analogous
biological phenomena to develop solutions for
engineering problems. Inspiring design ideas from
functions, behaviors, structures, materials, and form
of biological systems is a challenging process for
engineers and designers, and it encourages
development of creative designs. However, it is not
a straightforward engineering activity; it requires
high level balanced expertise on both domains.
Moreover, biologists and engineers use different
concepts and terminologies so that there is always
difficulty when biological phenomena are
transformed into engineering domains. Many studies
focus on constructing bioinspired design (BID)
methodologies to eliminate these disadvantages and
help designers to develop creative and innovative
products. Bioinspired conceptual design (BICD)
methodology (Konez-Eroglu et al., 2011a) was
developed for the design of hybrid bioinspired
robots which can be inspired from multiple
biological systems. An important problem in
bioinspired design is that once designers identify a
target biological system to be inspired, they must
obtain necessary knowledge for the solutions
applicable to their design problem. One of the
important types of knowledge is the behavior of the
target system. Rapidly growing experimental
possibilities allow researchers to represent behavior
of biological systems into powerful modeling and
simulation tools. In particular, bioinspired robot
design requires imitating behavior of the biological
target system on a physical robot. Therefore, a deep
understanding of the biological system behavior is of
great importance for designers to extract underlying
behavioral principles and to convert them
systematically into a biorobot design.
This paper presents a case study towards
development of a systematic approach for
converting experimental data of a biological system
behavior to a model framework that can be used in
engineering domain. In this study, a Petri Net model
for walking behavior of a dog is developed based on
an experimental data recorded using a high speed
camera. The model is capable of representing and
simulating the dog’s walking behavior as an 8-state
walking cycle with the associated time periods for
state transitions. The model structure is composed
of a brain-unit and a leg-unit for modularity. A Petri
Net model was developed and simulated using
Artifex graphical modeling and simulation
environment, which is a C++ based software tool.
The model is used to validate the deadlock free
Erden, Z. and Araz, M.
Petri Net Modeling and Simulation of Walking Behaviour for Design of a Bioinspired Robot Dog.
DOI: 10.5220/0005972702170224
In Proceedings of the 6th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2016), pages 217-224
ISBN: 978-989-758-199-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
217

walking behavior of a robot dog at conceptual
design stage.
The paper is organized as follows. Next section
presents a brief overview of the bioinspired design
(BID) methodology with special emphasis on the
importance of behavioral modeling for conceptual
BID. Then, the Petri Net model architecture for the
walking behavior of a dog is explained and
simulation results are given. Finally discussion and
conclusions regarding the current study are provided
together with the intended future research directions.
2 BEHAVIOURAL MODELING IN
BIOINSPIRED DESIGN
Capturing a natural system’s task accomplishment
behavior, and re-creating a qualitatively similar
behavior in an artificial system is one of the most
interesting research issues in the field of robotic
design methodology (Fleischer and Troxell, 1999).
Thus a new robot design methodology has been
emerged so as to develop behavior based robot
architectures. Behavior based robotic architectures
can be developed systematically using bioinspired
design (BID) methodologies. Bioinspired design
(BID) needs a systematic method for transformation
and it uses analogical reasoning approach in which
the source domain is the biological domain while the
target domain is engineering (Mak and Shu,
2004;Wilson, 2008;Tsujimoto et al., 2008; Nelson et
al., 2009; Helms et al., 2009). There are two
approaches in BID studies with respect to starting
point of the design; problem-based BID (PB-BID)
and solution-based BID (SB-BID). PB-BID starts
with an engineering problem in engineering domain
whereas SB-BID begins with a biological system in
biology domain.
Modeling the behavior of a biological system is a
challenging topic within the framework of
developing a systematic Bioinspired Conceptual
Design (BICD) process model (Konez-Eroglu et al,
2011a) given in Figure 1. The suggested BICD
process is developed to provide design concepts of
bioinspired robots, biorobots. Based on the existing
literature (Webb and Consi, 2001; Bar-Cohen, 2006;
Meyer and Guillot, 2008), bioinspired robots can be
defined briefly as follows;
Biorobots, biologically inspired (bioinspired)
robots or biomimetic robots, emulate the functions
and performance of biological systems, look like
inspiration model and behave similar to the original
model. Biorobots can be decomposed under
sensoric, motoric and cognitive sub-systems.
This definition is structured in a semantic
network representation (Konez-Eroglu et al., 2011b)
shown in Figure 2, so as to clarify the relationships
between various concepts. Among these concepts,
“behavior” is the main concern of the current study.
Behavior, which can implement different functions,
is a sequential change of states over time with
respect to change in the internal state of the body or
in the environment.
In the BICD methodology, one of the important
problems is to collect information about the behavior
of a biological system and develop a model to
represent the behavior. Then, the model can be used
to transform the biological system’s behavior
systematically into engineering system’s
(biorobot’s) behavior. Behavioral modeling is
described as one of the modeling approaches in
engineering design methodology and defined as a
channel category of the design knowledge stream
(Horvath, 2004). It is an important method in
engineering design to establish a framework for
developing virtual prototypes (Shen et al., 2005).
Behavioral models and their software
implementations allow designers to represent design
artifacts as technical systems and to analyze
compare and evaluate their possible behavior at an
early design stage in a short time. In a previous
research, Discrete Event System Specification
(DEVS) and Petri Net formalism were used for
modeling the operational behavior of educational
robots during conceptual design (Erden, 2010; Erden
2011).
Behavior of the robot was defined as composed
of states and state transitions independent of any
physical embodiment. Quadruped walking behaviour
has been investigated in various research studies
(Griffin et al., 2004; Pongas et al., 2007). In the
BICD process, behavioral modeling of a biological
system is based on observing states of the system
behavior and understanding how transitions occur
between the states. In this study, an experiment has
been conducted to observe walking behavior of a
dog to determine states and state transitions.
Behavioral model is developed using Petri Net
formalism (Peterson, 1977; Murata, 1989) with the
Artifex graphical modeling and simulation
environment as the software tool. We selected to use
Petri Nets in this study due to the simplicity of
describing states and state transitions graphically as
well as due to the possibility of translation into
mathematical-logical expressions. These advantages
also lead several researchers to model robot
behaviours using Petri Nets (Kobayashi et al., 2002;
SIMULTECH 2016 - 6th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
218
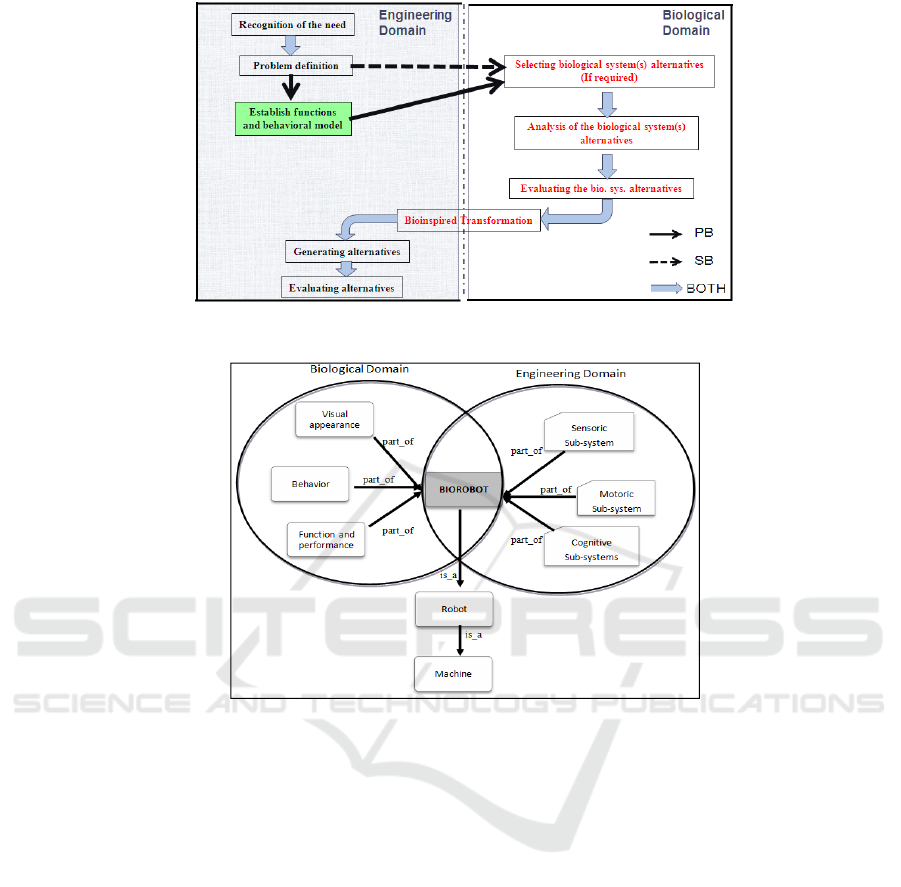
Figure 1: PB-BICD and SB-BICD phases in BICD (Konez-Eroglu et.al, 2011a).
Figure 2: A semantic network representation of a biorobot (Konez-Eroglu et.al, 2011b).
Guangtao et al., 2003; Serhan et al., 2008;
Vladareanu et al., 2011).
3 PETRI NET MODEL
ARCHITECTURE FOR A
DOG’S WALKING
BEHAVIOUR
This section includes detailed information on the
Petri Net model developed for the representation and
simulation of the walking behavior of a dog in the
Artifex software environment. The aim is to
observe and systematically represent walking
behavior of a dog in time domain.
A high speed camera was used in the observation
phase of the study. A Photron Fastcam MC-2 Color
10K high speed camera (512 x 512 pixel) with
Navitar TV zoom 8.5 - 51 mm lens and two
Megaman 60 W cold lighters were used. A terrier
type dog with a mass of 3.7 kg was used in the
experiment. The dog walked freely on a treadmill.
The experimental set-up is shown in Figure 3. Since
the camera consists of one head, two dimensional
video images were obtained. The dog’s walking
behavior was recorded with 1000 fps with 376 x 484
pixel resolution videos. TEMA Motion 2D
software program was used to analyze the dog’s
walking behavior and obtain the time data.
Time data for the Petri Net model was collected
with an experiment in which the dog’s walking
speed is 1km/h. Walking period is divided into tours
as shown in Figure 4. A tour is the time duration in
which all legs take one complete step with 8-states
represented by UP and DOWN positions of the legs.
Duration of each tour is 704 ms and Figure 4
represents time data for 3-tours.
Petri Net Modeling and Simulation of Walking Behaviour for Design of a Bioinspired Robot Dog
219
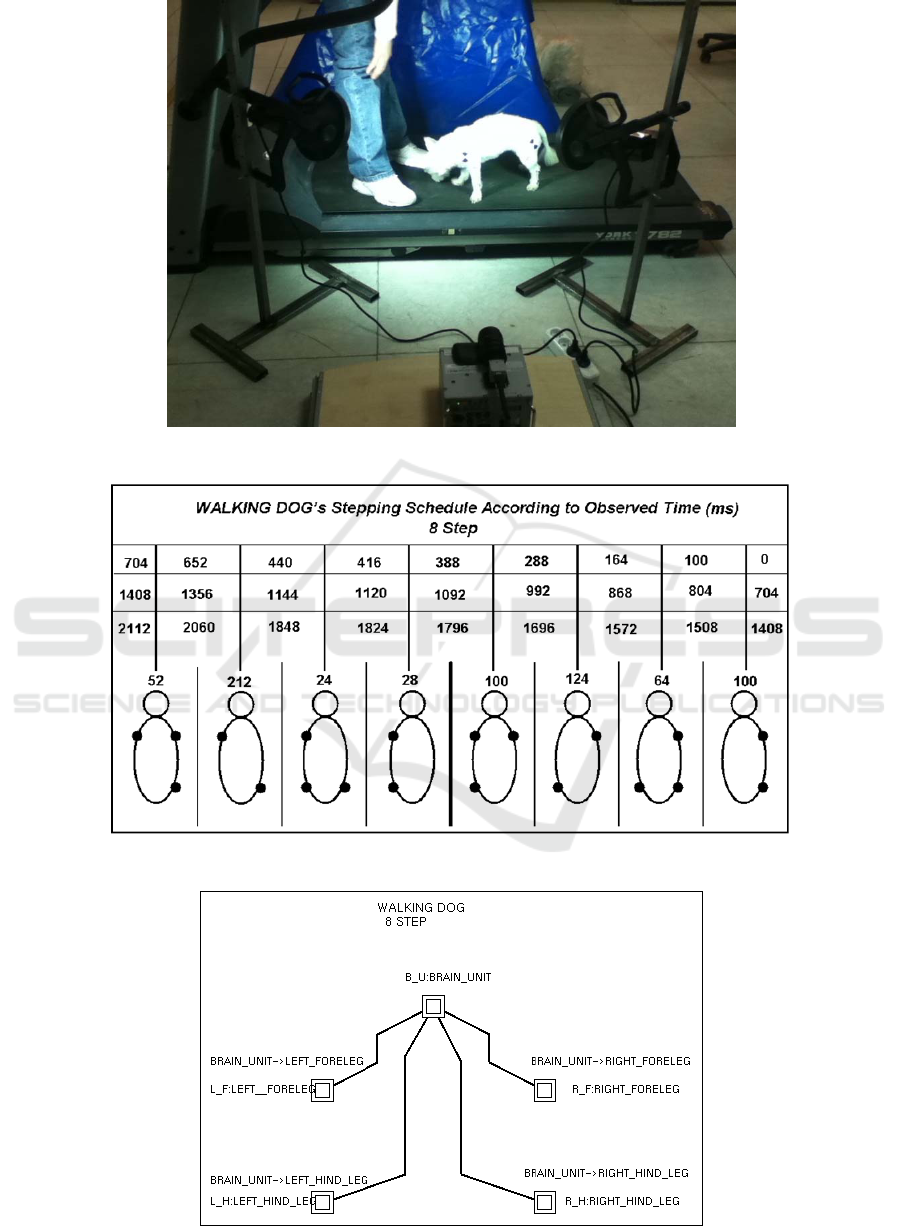
Figure 3: Experimental set-up for recording a dog’s walking behavior.
Figure 4: Walking dog stepping schedule obtained from the experiment.
Figure 5: Top level Petri Net model of the dog’s walking behavior.
SIMULTECH 2016 - 6th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
220
In the Petri Net model architecture (Figure 5),
five objects are used to represent behavior of the
dog's body organs that contribute its walking; these
are a brain unit and four leg units (a left foreleg, a
left hind leg, a right foreleg and a right hind leg).
The model has the ability of simulating the real time
rhythm of dog's walking by means of different
colors (as blue and red) and states (numbers); as well
as the step-by-step simulation in virtual time. During
the simulation, the brain unit counts the number of
tours and expresses that by a state (number) and
color of the related leg unit. Behavior of each leg
unit is simulated in real time such that DOWN
position is represented by the number “0” and color
“blue” and UP position is represented by the
number “1” and color “red”. Each object in Figure 5
is modeled with an associated Petri Net. Linksets are
used to connect the leg units in the model
architecture with the brain unit. Petri Net models of
the brain unit and left foreleg are shown in Figure 6
and Figure 7, respectively.
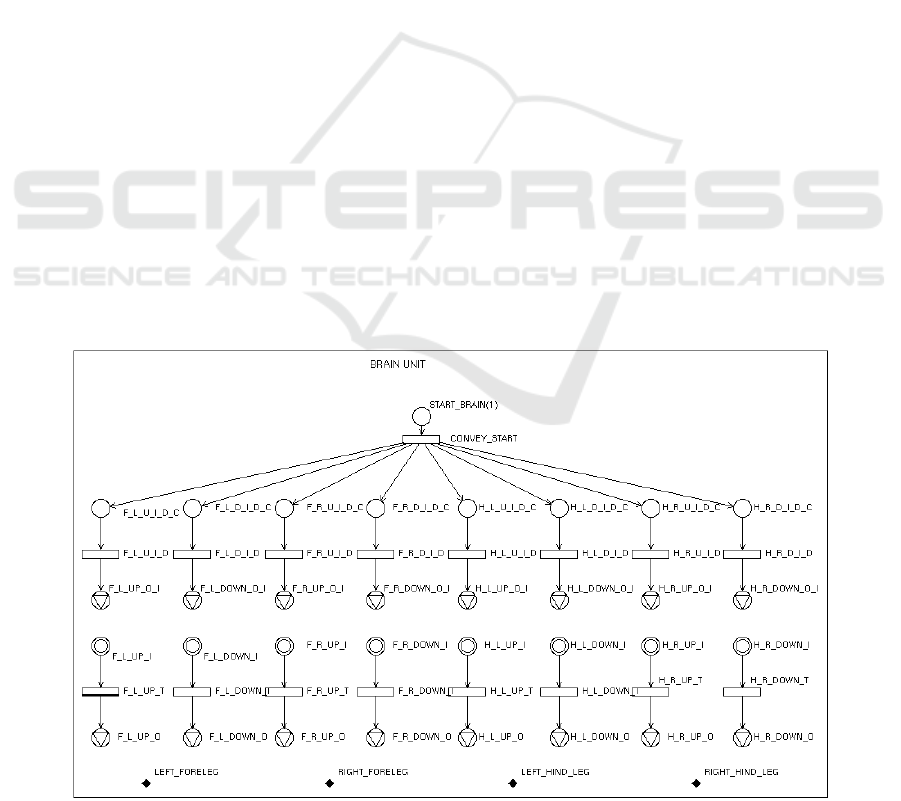
Brain Unit (Figure 6) contains a place
(START_BRAIN) and a transition (CONVEY)
alongside eight columns of components (places and
transitions). The place START_BRAIN contains an
initial token which operates as a starting signal in the
brain and is propagated throughout the eight
columns of components which represent the brain
cells.Brain columns include two transitions, one
normal place, one input place (represented by two
concentric circles) and two output places
(represented as a triangle inside a circle). Input and
output places have the task of communicating with
other units (legs) in the model. Each two brain
columns operate as the control mechanism of one
leg, one for the UP position of the leg and one for
the DOWN position. Each position has an active
period and an inactive period. It means for instance
for the DOWN position, the leg is on the ground
during the active period and it is lifted during the
inactive period. DOWN and UP positions are
exactly converse of each other on the time domain.
Each position (DOWN or UP) has an initial delay
alongside the active and inactive durations. In the
Brain Unit, initial delays are set in the upper
transitions and the active period durations are
inserted in the lower transition while the durations
for inactive periods are set in a transition in the Leg
Unit. The black diamonds at the bottom part of
Figure 6 are Portsets which are used to connect the
brain to other units (legs) through Linksets. Linksets
are like multi-wire cables and the portsets are like
the terminals that those cables are connected. All the
input and output places connecting the brain to each
leg are linked to the related portset. This procedure
is repeated in each unit as well.
Similar to the Brain Unit, Petri Net model for the
Leg Units are composed of two main parts to
represent DOWN and UP positions. As an example,
Petri Net model of the left foreleg is given in Figure
7. The right side models DOWN and the left side
models UP position of the leg. Each part consists of
three transitions, one normal place, two input places
and one output place. Inactive period duration of the
leg position is set in the upper transition and the two
lower transitions have the duty of conveying the
Figure 6: Petri Net for the Brain Unit.
Petri Net Modeling and Simulation of Walking Behaviour for Design of a Bioinspired Robot Dog
221
brain command to the leg during the initial delay and
active period duration. The upper transition also
contains some C++ codes to set the illustrating
colors and states (numbers) of the model.
4 MODEL SIMULATION
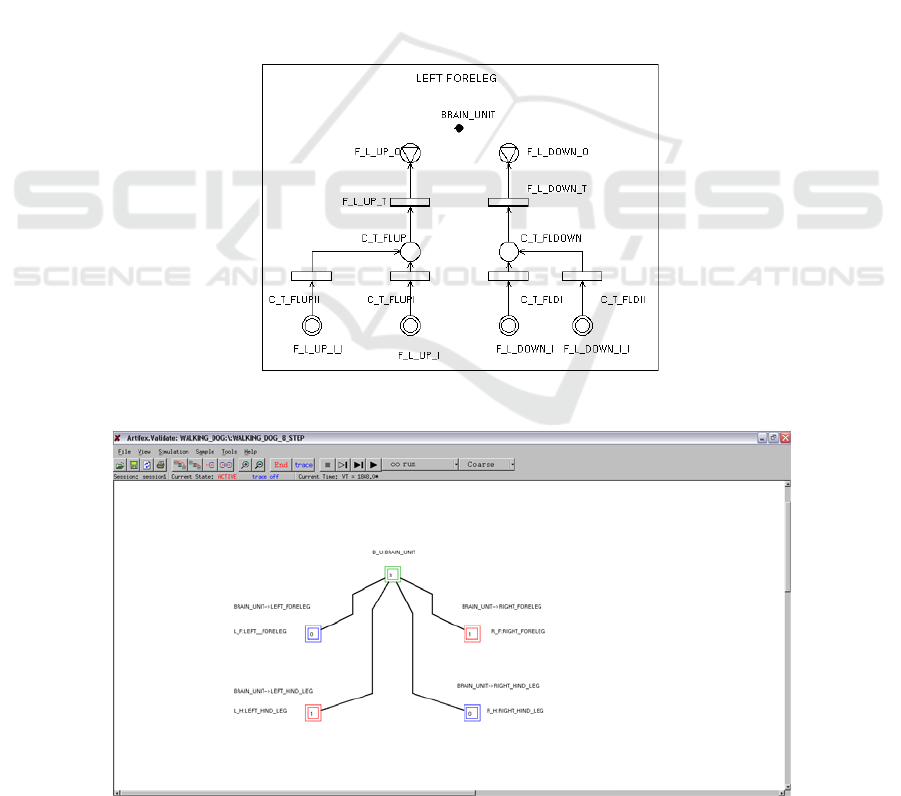
Figure 5 shows the top level page of the Petri Net
model for the dog’s walking behavior in Artifex
Model Editor environment. All units in the model
architecture are illustrated at this level. Figure 8
illustrates a screenshot from the simulation
environment of the software. The figure depicts the
model at instant 1848 ms in the 3
rd
tour. As for the
legs, One and Red express the UP position, while
Zero and Blue express the DOWN position. Numbers
and colors at the brain simply count the tour number.
Simulation can be carried out both step-by-step in
virtual time and also in real time. Four measures,
one for each leg, are defined in the model. These
measures allow the designer to monitor the
summation of time durations for which each leg is
on the ground (DOWN position) during the total
time of walking which is a specified number of tours
the dog takes. It also let the user to observe the
initial delay and final time gap of the DOWN
position of the leg. It should be noted that the initial
delays are given for the model only, because the
model has to set the legs at the beginning and there
is no such a delay in dog’s nature. Table I shows
total time durations for which each leg is on the
ground for 10 tours.
The results and data collected from these
measurements provide a more realistic and detailed
viewpoint for the designer before stepping into the
stage of designing and manufacturing a prototype of
a robot. In a parallel research study, experimental
data for the walking behavior has been used
manually to design and construct a demonstrative
Figure 7: Petri Net for the left foreleg.
Figure 8: Screenshot of the graphical simulation of the dog’s walking behavior.
SIMULTECH 2016 - 6th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
222
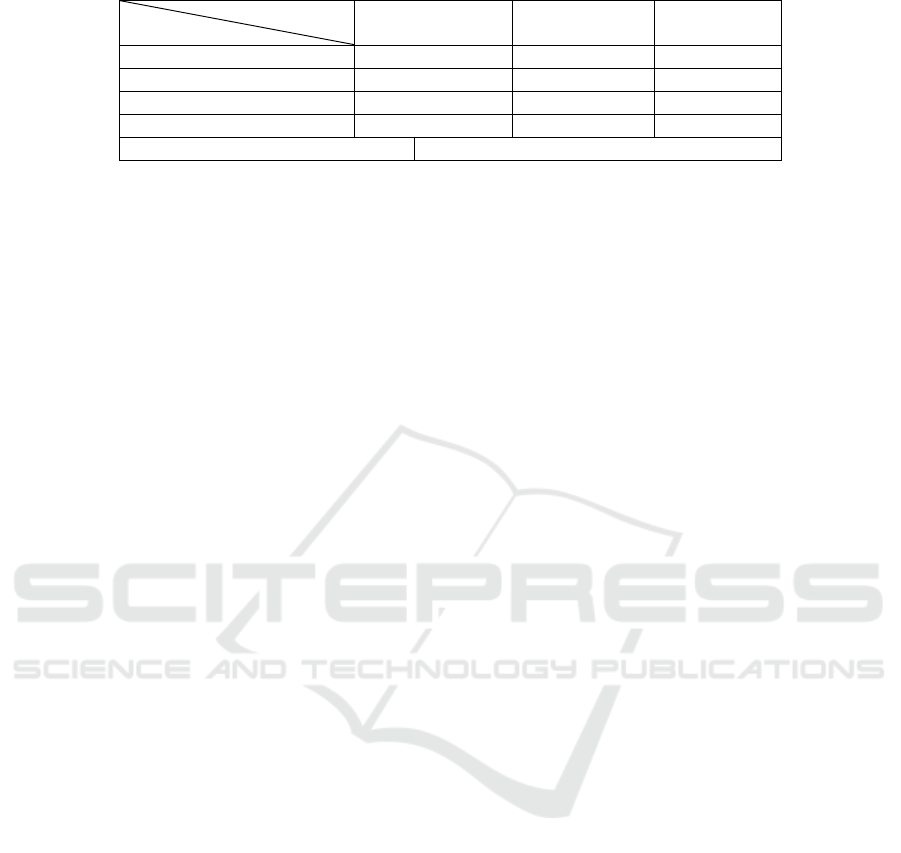
Table 1: Time data for a measurement session.
Beginning (ms) End (ms) Duration (ms)
Right Foreleg 652 6988 4400
Left Foreleg 288 6624 4160
Right Hind Leg 416 6752 4520
Left Hind Leg 100 6436 3400
Tour Numbers: 10 Total Duration: 7040 (704 each tour)
prototype of a bioinspired robot dog. In the starting
setting periods for legs, one can observe the total
duration that each leg is on the ground and the
instant that a leg steps up just before the end of each
run. Therefore, these measures are used in the design
and manufacturing process for checking and
modifications as well as in the processor
programming at the manufacturing stage.
5 CONCLUSIONS
Development of a model to represent and simulate
the behavior of a biological system is a challenging
research topic for the analysis of biological systems
during the implementation of the Bioinspired
Conceptual Design (BICD) methodology for design
and manufacturing of biorobots. As a case study,
this paper presents the development of a Petri Net
model for a walking behavior of a terrier dog. The
model is based on an experimental data for the states
and state transitions during walking. States are
represented as various combinations of up or down
positions of the dog’s legs. Model development and
simulation has been done successfully using
Artifex modeling and simulation environment.
Four user defined measures have been developed to
test the possibility of performance analysis based on
the Petri Net model. These measures are not used for
any evaluation, since the present study mainly
focuses on developing a structured and formal
representation of an unstructured and informal
natural behavior with a well-known modeling tool.
This case study shows that behavior of a biological
system can be represented as a Petri Net model for
simulation. Future research will be directed towards
Petri Net model development for various biological
system behaviors in different case studies and
establishment of a generalized behavioral modeling
method for BICD using Petri Nets. Another future
work includes performance analysis of the model
based on user defined measures.
ACKNOWLEDGEMENTS
This research is conducted with the support of
ATILIM University Research Grant (Project NO:
ATU-BAP-1011-07, Project Title: “Behavior Based
Modeling at Conceptual Robot Design and Desktop
Design of Educational Robots”) and TUBITAK-The
Scientific and Technological Research Council of
Turkey (Project No: TUBITAK 109M379, Project
Title: “Development of biomimetic design
methodology with reverse engineering in cognitive
recognition and control of biomimetic robots”. This
is a joint project between Department of
Mechatronics Engineering, ATILIM University,
Turkey and University of Craiova, Romania).
REFERENCES
Bar-Cohen, Y., 2006. Biomimetics: Biologically Inspired
Technologies. Taylor and Francis, USA.
Erden, Z., 2010. Representation of the Operational
Behavior of an Educational Robot at Conceptual
Design Using Petri Nets. In Proceedings of ASME
2010 10th Biennial Conference on Engineering
Systems Design and Analysis (ESDA 2010), pp. 855-
862. İstanbul, Turkey, 12-14 July 2010.
Erden, Z., 2011. State-Based Conceptual Design in
Mechatronics via Petri Nets. Journal of Control
Engineering and Applied Informatics, 13(2), pp. 70-75.
Fleischer, J. G., Troxell, W. O., 1999. Biomimicry as a
tool in the design of robotic systems. In Proceedings
of the 3rd International Conference on Engineering
Design and Automation. Integrated Technology
Systems, Prospect, KY.
Griffin,T.M., Main,R.P., Farley,C.T., 2004. Biomechanics
of quadrupedal walking: how do four-legged animals
achieve inverted pendulum-like movements? The
Journal of Experimental Biology, 207, pp. 3545-3558.
Guangtao, Z., Haojun, Z., Jinsong, W., Tiemin, L., 2003.
Petri-net-based coordination motion control for legged
robot. In Proceedings of IEEE International
Conference on Systems, Man and Cybernetics,
Washington, D.C. USA. 5-8 October 2003.
Helms, M., Vattam, S. S., Goel, A. K., 2009. Biologically
Petri Net Modeling and Simulation of Walking Behaviour for Design of a Bioinspired Robot Dog
223

inspired design: process and products. Design Studies,
30(5) pp. 606-622.
Horvath, I., 2004. A Treatise on Order in Engineering
Design Research. Research in Engineering Design. 15,
pp.155-181.
Kobayashi, K., Nakatani, A., Takahashi, H., Ushio, T.,
2002. Motion planning for humanoid robotsusing
timed Petri net and modular state set. In Proceedings
of IEEE International Conference on Systems, Man
and Cybernetics, Hammamet, Tunusia. 6-9 October
2002.
Konez-Eroglu, A, Erden, Z. and Erden, A., 2011a.
Bioinspired conceptual design (BICD) approach for
hybrid bioinspired robot design process. In
Proceedings of IEEE International Conference on
Mechatronics (ICM 2011), İstanbul, Turkey. 13-15
April 2011.
Konez-Eroglu, A., Erden, Z., Erden, A., 2011b. Biological
System Analysis in Bioinspired Conceptual Design
(BICD) for Bioinspired Robots. Journal of Control
Engineering and Applied Informatics, 13(2), pp.81-86.
Mak, T. W., Shu, L. H., 2004. Abstraction of Biological
Analogies for Design. CIRP Annals-Manufacturing
Technology, 53(1), pp. 117-120.
Meyer, J. A., Guillot, A., 2008. Handbook of Robotics
Chapter 60: biologically inspired robots, part G:
human-centered and life-like robotics. Springer.
Murata, T., 1989. Petri Nets: Properties, Analysis and
Applications. Proceedings of the IEEE, 77(4), pp. 541-
580.
Nelson, B., Wilson, J., Yen, J., 2009. A Study of
Biologically-Inspired Design as a Context for
Enhancing Student Innovation. In Proceedings of the
39th ASEE/IEEE Frontiers in Education Conference,
San Antonio, TX, pp.1-5.
Peterson, J. L., 1977. Petri Nets. ACM Computing
Surveys, 9, pp.223-252.
Pongas, D., Mistry, M., Schaal, S., 2007. A robust
quadruped walking gait for traversing rough terrain. In
Proceedings of IEEE Int. Conference on Robotics and
Automation, Rome. Italy. 10-14 April 2007.
Serhan, H., Nasr, C., Henaff, P., Ouezdou, F., 2008. A
New Control Strategy for ROBIAN Biped Robot
Inspired from Human Walking. In Proceedings of
IEEE/RSJ Int.Conference on Intelligent Robots and
Systems, Nice, France. 22-26 September 2008.
Shen, Q., Gausemeier, J., Bauch, J., Radkowski, R., 2005.
A Cooperative Virtual Prototyping System for
Mechatronic Solution Elements Based Assembly.
Advanced Engineering Informatics, 19, pp.169-177.
Tsujimoto, K., Miura, S., Tsumaya, A., Nagai, Y.,
Chakrabarti, A., Taura, T., 2008. A Method for
Creative Behavioral Design Based on Analogy and
Blending from Natural Things. In Proceedings of.
ASME 2008 International Design Engineering
Technical Conferences and Computers and
Information in Engineering Conference, IDETC/CIE
2008, USA.
Vladareanu, K.,Tont,G., Yu, H., and Bucur, D.A., 2011.
The Petri Nets and Markov Chains Approach for the
Walking Robots Dynamical Stability Control. In
Proceedings of 2011 International Conference on
Advanced Mechatronic Systems, pp. 228-233.
Zhengzhou, China,11-13 August 2011.
Webb, B., Consi, T. R., 2001. Biorobotics: Methods and
Applications.
The MIT Press, Canada.
Wilson, J. O., 2008. A Systematic Approach to Bio-
Inspired Conceptual Design. PhD. Thesis, Georgia
Institute of Technology, Atlanta, GA.
SIMULTECH 2016 - 6th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
224
