
Design and Analysis of Cascaded Variable Buoyancy Systems for
Selective Underwater Deployment
Thiyagarajan Ranganathan and Asokan Thondiyath
Robotics Laboratory, Department of Engineering Design, Indian Institute of Technology Madras, Chennai, India
Keywords:
Variable Buoyancy, Selective Deployment, Bellow with Linear Actuator.
Abstract:
Variable Buoyancy systems for selective deployment has been designed and the analysis of dynamics is dis-
cussed in this paper. Multiple interconnected VB modules have specific advantages in positioning the payloads
like sensors and communication equipment at various depths to collect strategically important subsea data. The
design of metallic bellow based Variable Buoyancy Systems (VBS) is presented along with the dynamic anal-
ysis of the module. The dimensions of the VB module are optimised to give best performance at the desired
depth of operation. Effect of anchoring the module to a base station and cascading multiple modules for de-
ploying at various depths have been studied in detail. Simulation results show that the cascaded VB modules
can be successfully deployed for selective applications under various operating conditions.
1 INTRODUCTION
A variable buoyancy system is a device which can
change its mass (keeping volume unaltered) or vol-
ume (keeping mass unaltered) during its operation,
thereby varying the net buoyancy (difference between
weight and buoyancy) of the system. When the
weight of the system is equal to the buoyancy, the
system is Neutrally buoyant and based on the sign of
difference between weight and buoyancy, the system
is either positively or negatively buoyant. Variable
Buoyancy Systems for different underwater applica-
tions either for underwater systems or as stand-alone
system, is one of the main research interests in the
field of underwater vehicles (Sumantr and Teknologi,
2008; Tangirala and Dzielski, 2007; Wen-de Zhao
et al., 2010; Worall et al., 2007; Ranganathan et al.,
2015; Wu et al., 2011). Such systems dive across
the water column by varying the buoyancy and they
are used in underwater vehicles to get depth varia-
tion during manoeuvres. VBS, being one of the ef-
ficient ways to achieve various depths, has potentials
much more than just using them as add-ons to under-
water vehicles. There may be situations where we
need to maintain the depth of a sensor suite under-
water to collect information. Depending on the appli-
cation, sensor suite may need to change the depth at
regular intervals to meet specific requirements. Under
such circumstances, a VBS can be positioned at the
desired depth by anchoring and when required, it can
be deployed to the desired depths. Hence VBS can
be used as standalone systems which have the ability
to achieve required vertical single degree of motion
efficiently. However when the depth of operation in-
creases, the length of cable connected to VBS to an-
chor will increase which may result in couple of is-
sues. First, if the cable is not neutrally buoyant, after
a certain length, the self-weight will become higher
the maximum positive buoyancy that can be achieved
by the VBS and this will lead to system malfunc-
tioning. Secondly, the cable may get entangled and
handling the cable will be difficult. In these situa-
tions, there is a need for multiple interconnected VBS
which will avoid the issues discussed. Furthermore, if
the considered scenario is extended in a way that the
surrounding environment has to be monitored at var-
ious depths simultaneously, the same interconnected
VBS can be used. Hence selective deployment can
be achieved by having such multiple interconnected
modules.
Different types of VBS are available in literature
and based on the requirement of selective deploy-
ment, a suitable method has to be chosen. Most of
variable buoyancy systems use water ballast in which
either the weight or volume is changed witha suit-
able mechanism (Tangirala and Dzielski, 2007; Wen-
de Zhao et al., 2010). (Wu et al., 2014) proposed a
ballast based VB mechanism to position the system at
a depth. The surrounding water is taken in to increase
the mass and vice versa. This may result in corro-
Ranganathan, T. and Thondiyath, A.
Design and Analysis of Cascaded Variable Buoyancy Systems for Selective Underwater Deployment.
DOI: 10.5220/0005979903190326
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 319-326
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
319

sion of the system when it is operated for longer du-
ration. (Worall et al., 2007) developed a bellow based
VB system which uses reservoir with oil and a pump
to fill oil in and out of the bellow so that the overall
weight of the system is varied. In this case the size
of the system becomes large because of the support-
ing components and the maintenance becomes diffi-
cult. Spermaceti oil hypothesis based VB modules
are also used in some systems. Paraffin wax with a
heating element are used to change the volume of a
system (Shibuya and Kawai, 2009). Such response
time of such systems are low. A metallic bellow based
VB system is reported in (Shibuya and Yoshii, 2013)
which uses a peltier element to change the phase of a
paraffin wax which can be used to expand and com-
press the bellow. Some methods use the gas produced
by microbes to change volume and thereby achieving
variable buoyancy. These systems do not require any
external power (Wu et al., 2011).
Considering the need for a controlled buoyancy
variation, a VBS with metallic bellows and actuated
by linear actuators is discussed in this paper. The nec-
essary variation in buoyancy can be obtained by con-
tracting or expanding the metallic bellow using a suit-
able linear actuator. A system with a metallic bellow
with linear actuator and necessary supporting struc-
tures/devices becomes a VB module. Multiple of such
modules can be interconnected to selectively deploy
at different depths to simultaneously monitor/sense at
different depths. The design of a cascaded VB system
for selective deployment and intermittent actuation is
analysed in the following sections.
2 SYSTEM DESIGN
As discussed in the previous section, selective deploy-
ment uses multiple modules cascaded in such a way
that each of these modules can be actuated individu-
ally or in combination to achieve desired movement or
depth. One such cascaded schematic with two mod-
ules is shown in figure 1.
Each of these VB modules is based on the concept
of bellow with linear actuators. The conceptual de-
sign of a bellow based VB module is shown in figure
2. It has a hull and two bellows. The hull and bellows
are connected using flanges with bolts and nuts. The
hull provides a platform to hold the linear actuators as
well as the electronics required to control the move-
ment of linear actuators. Two linear actuators are used
to individually actuate the two bellows. Provisions are
made for connectors for power and communication
signal transmission. To understand the behaviour of
the system, initially, bellow with linear actuator based
Figure 1: Cascaded modules for selective deployment.
(a) CAD model
(b) Internal view
Figure 2: Conceptual design of a metallic bellow based VB
module.
VBS is modelled mathematically and few open loop
simulations are carried out. Then, multiple of such
systems are cascaded and simulated.
These modules are designed based on the require-
ments that they should be able to operate at a par-
ticular depth and it is desired that these systems are
portable and light weight. To achieve these require-
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
320

ments the dimensions of the module are optimised to
minimize the weight of the module and to minimize
the force experienced by the end plate of the bellow,
subject to constraints on length and neutral buoyancy.
Hence with all these objectives, the design parame-
ters like the radius and length of the bellow and the
hull were optimized. These dimensions of the system
are optimized for it to be operated up to a depth of
10m and are shown below. For a different depth of
operation, the dimensions are to be optimized again
and the specification of linear actuator will vary.
r
h
= 110.5mm, r
b
= 108.5mm,
L
h
= 130mm, L
b
= 193.5mm
3 MATHEMATICAL MODEL
The system is assumed to be cylindrical with body
fixed coordinate frame X
0
Y
0
Z
0
and the earth-fixed co-
ordinate frame is represented as XY Z as shown in fig-
ure 3. The six-degrees of Freedom (DoF) dynamics
of the underwater system is derived using Newton-
Euler equations in body fixed co-ordinate frame as
shown in equation (1) (Fossen, 1994; Gianluca An-
tonelli, 2006).
τ
τ
τ = M
M
M
˙
v
v
v +C
C
C(v
v
v)v
v
v +D
D
D(v
v
v)v
v
v +g
g
g(η
η
η) (1)
Here, v is the vector representing linear and an-
gular velocites of the system. η
η
η is the pose vector in
earth fixed co-ordinate frame obtained by transferring
the body - velocities to velocities in earth frame using
J(η
η
η) and integrating the velocities in earth frame. τ
τ
τ
is the external forces and moments vector. M is the
matrix comprising of mass and inertia of the system
along the principle axes, D(v
v
v) is the damping forces
and moments matrix, C(v
v
v) is the Coriolis and Cen-
tripetal forces and moments matrix, and g(η
η
η) is the
Restoring forces and moments vector which governs
the forces and moments due to difference in Buoy-
ancy (W) and weight (W) of the system and also the
position of CoG and Centre of Buoyancy (CoB).
The underwater module will experience force on
the end plate due to external hydrodynamic pressure,
and internal pressure due to expansion and compres-
sion. The spring force of the bellow also influences
the dynamics of the actuation of the bellows. The
variation of the internal forces as a function of the bel-
low length variation is plotted in figure 4 .The max-
imum internal force due to internal pressure for the
designed module was found to be +/-350N for an 8%
change in length of bellows. The bellow stiffness is
taken as 54N/mm. The force on the endplate due
Figure 3: Co-ordinate frame representation.
Figure 4: Percentage change in length vs force acting on the
endplate.
to external hydrodynamic pressure will linearly vary
with the depth at the rate of 380N/m.
These forces were also modelled and incorporated
in the above discussed mathematical model while
analysing the dynamic performance of the module.
3.1 Open Loop Simulation Studies
Simulations are carried out with the mathematical
model developed. No external disturbances are con-
sidered during the simulation and the pressure vari-
ation along the water column is assumed to be uni-
form. Some studies were carried out to understand
the behaviour of the system when it has some initial
orientation. When the system is left with an initial ori-
entation of 10
◦
and 20
◦
of roll and pitch respectively,
it rolls back to the stable equilibrium position with
both becoming 0
◦
. It is because of the restoring mo-
ment created due to non-alignment of CoG and CoB.
Oscillations are noticed which dies down slowly as
shown in figure 5.
When the system is oriented in roll in such a way
that the CoG is above the CoB, it is observed that with
even small numerical disturbances, it rolls back again
to the stable position and oscillates around the sta-
ble position. This oscillation dampens down progres-
sively. The net positive buoyancy ‘b’of the system is
varied from 0.5N to 3N and the velocity at which the
system travels along the water column was studied. It
Design and Analysis of Cascaded Variable Buoyancy Systems for Selective Underwater Deployment
321
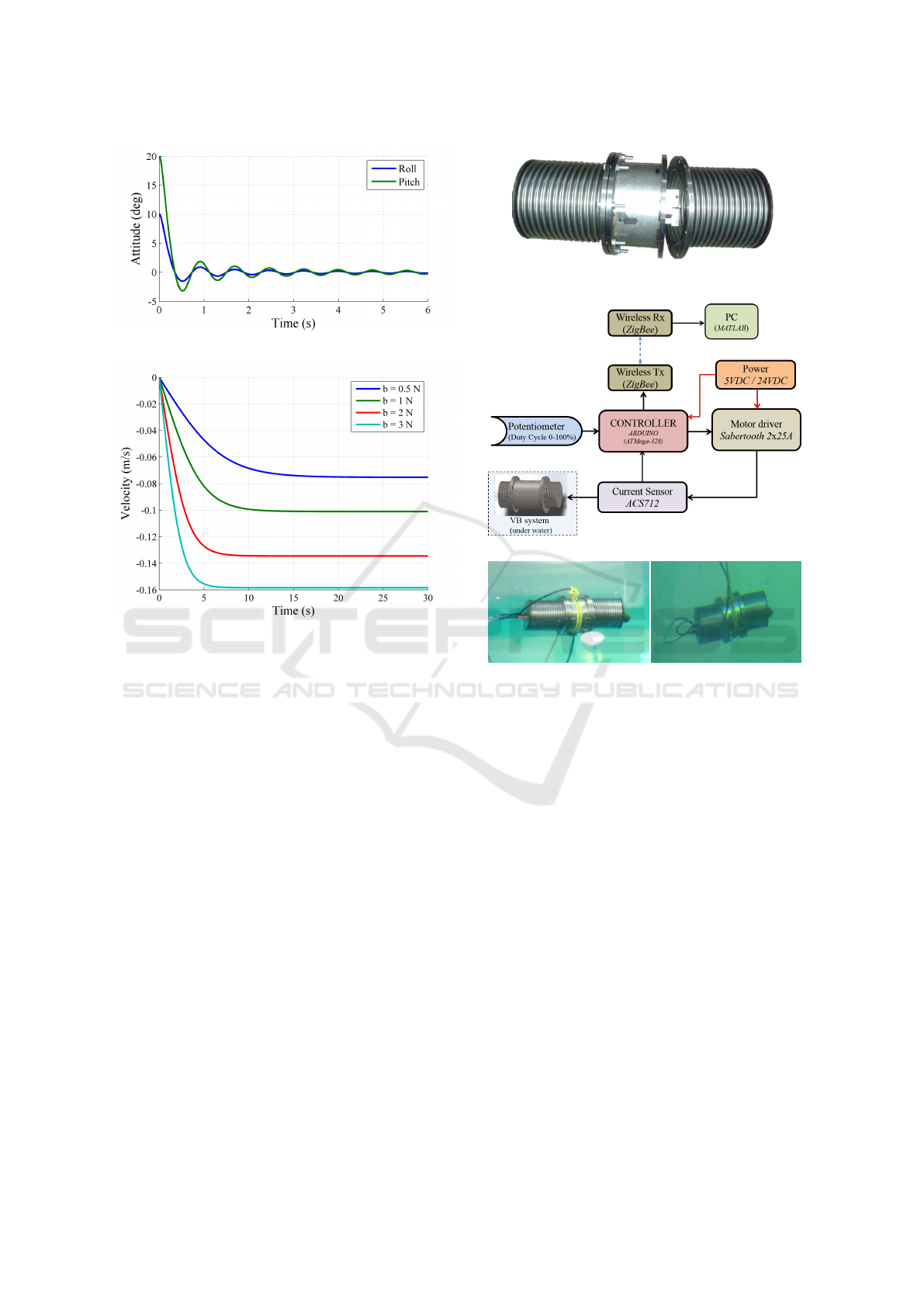
Figure 5: Attitude of the module.
Figure 6: Velocity at various positive buoyancy.
was noticed that the system accelerates initially and
after some time it starts moving with constant veloc-
ity (saturation velocity). At different levels of positive
buoyancy, the velocities achieved by the system are
shown in 6.
4 EXPERIMENTAL SETUP
The objective of the experimentation is to validate
the mathematical model and to understand the power
consumed by the system while operating at various
depths. To validate the model, a prototype was de-
signed and fabricated based on the dimensions ob-
tained from optimization. The material used for the
prototype is stainless steel; figure 7 shows the fabri-
cated system. Two linear actuators are chosen based
on the force analysis to expand and compress the bel-
lows. Underwater connectors and cables are used for
power and communication signals.
The electrical and electronic setup consists of a
controller, motor drivers for linear actuators, and sen-
sors. The role of controller is mainly to get user com-
mands, communicate them to the linear actuator ac-
cordingly and collect some vital information from the
system, communicate them to the user. A current sen-
Figure 7: Fabricated prototype.
(a) Schematic of experimental setup.
(b) VB system during operation.
Figure 8: Experimental setup.
sor is used to sense the current consumed in the sys-
tem during its operation, which can help us estimate
the overall power consumed by the system per cy-
cle of operation. The controller will generate Pulse
Width Modulated (PWM) signals and send it to mo-
tor drivers. A ZigBee based wireless communication
is used to communicate the parameters like time, cur-
rent and commanded velocity, instantly to a remote
PC in which the data can be recorded and visualised
in real time. A 24V 6A DC power source is used to
power the entire system and source is stepped down
wherever required. The schematic of the experimen-
tal setup and some pictures during the operation are
shown in figure 8. The entire setup, except the VB
module, will act as the ground control station.
4.1 Results and Discussion
Ground experiments were conducted to measure the
velocity of the linear actuator at different Duty cy-
cles of PWM. The speed of the linear actuator with
respect to PWM duty cycle is shown in figure 9. The
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
322

Figure 9: Bench test : Velocity of LA Vs. Duty cycle.
percentage of duty cycle of PWM signal corresponds
to the input voltage to the linear actuator at the rate
of 0.24V/% of duty cycle. A bench test on the sys-
tem with different duty cycle input to the system was
conducted. It can be seen that the velocity during ex-
pansion is faster than the velocity during compression
in the bellows.
The following are the results during experiments
underwater. Experiments were conducted up to a
depth of 5m. The objective of the experiments is to
understand the time taken to surface and sink by the
system from/to different depths at different rates of
change of buoyancy. The rate of change of buoyancy
is directly proportional to the velocity of the linear ac-
tuator which is commanded by the input voltage to the
linear actuator. Experiments were repeated six times
at each depth and the mean time taken by the sys-
tem to sink/surface to a particular depth with different
duty cycle is shown in figure 10.
It can be observed that the time taken to surface is
slower than the time taken to sink to the same depth.
This is mainly due to the external pressure variations
during sinking and surfacing. The experimental re-
sults are compared with the simulation results for a
particular buoyancy variation. The experimental and
simulation results of time taken to sink and surface at
12V and 24V are shown in figure 11.
Simultaneously, the current consumed for surfac-
ing and sinking to a depth by expanding or contract-
ing is logged. It was found that the expansion from
a depth consume more current than compression ini-
tially since the linear actuator has to overcome the
force due to external pressure to expand. On the other
hand, the force required to compress is comparatively
lesser since the external pressure itself aids in com-
pression.
5 ANCHORED AND CASCADED
SYSTEMS
Simulation studies were conducted to understand the
(a) Time taken to sink.
(b) Time taken to surface.
Figure 10: Time taken to sink and surface at different rate
of change of buoyancy.
behaviour of the system when the VB module is an-
chored at a particular depth as shown in figure 12. The
point to which the cable is connected to the system is
P and the length of the cable is L. For this simulation,
the cable length is assumed to be 3m, anchoring point
A is [0,0,0] and the initial point at which the system
is positioned is [1,0.5,-1] with respect to the inertial
frame. The behaviour when the module travel along
Z is shown in figure 13. It can be seen from the plot
that it the system travels up and it oscillates when the
cable is stretched completely. The dynamics of the
cable is not considered in this simulation.
Now another module is cascaded on top of the
anchored module as shown in figure 1. Initially the
buoyancy of both the modules are kept neutral. The
cascaded module is made positively buoyant by 1N
after 50th second of simulation.
The modules are initially located at [0.5,0,-0.5]
and [1,0,-0.5] and the point to which the first mod-
ule is anchored is at [0,0,0] with respect to the earth
frame. Cable lengths are 2m and 5m for the first and
Design and Analysis of Cascaded Variable Buoyancy Systems for Selective Underwater Deployment
323
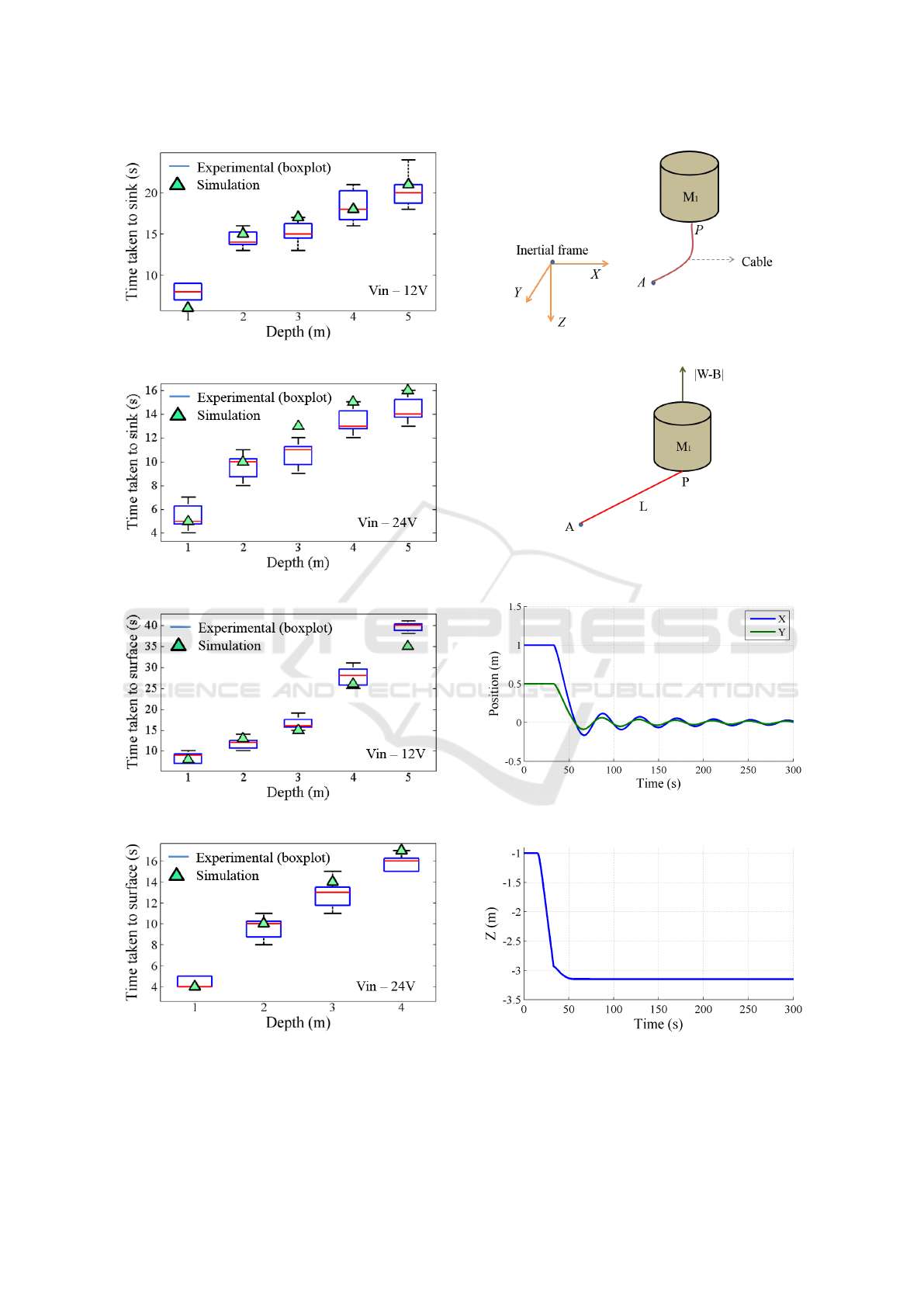
(a) Time taken to sink at V
in
=12V.
(b) Time taken to sink at V
in
=24V.
(c) Time taken to surface at V
in
=12V.
(d) Time taken to surface at V
in
=24V.
Figure 11: Comparison of experimental and simulation re-
sults.
(a) Initial position.
(b) When cable is stretched.
Figure 12: An anchored system.
Figure 13: Variation in XY position of the VB module when
anchored.
Figure 14: Variation in Z of an anchored module.
second modules respectively. It can be seen that, as
the second system moves up, when the cable is com-
pletely stretched, the positive buoyancy of cascaded
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
324
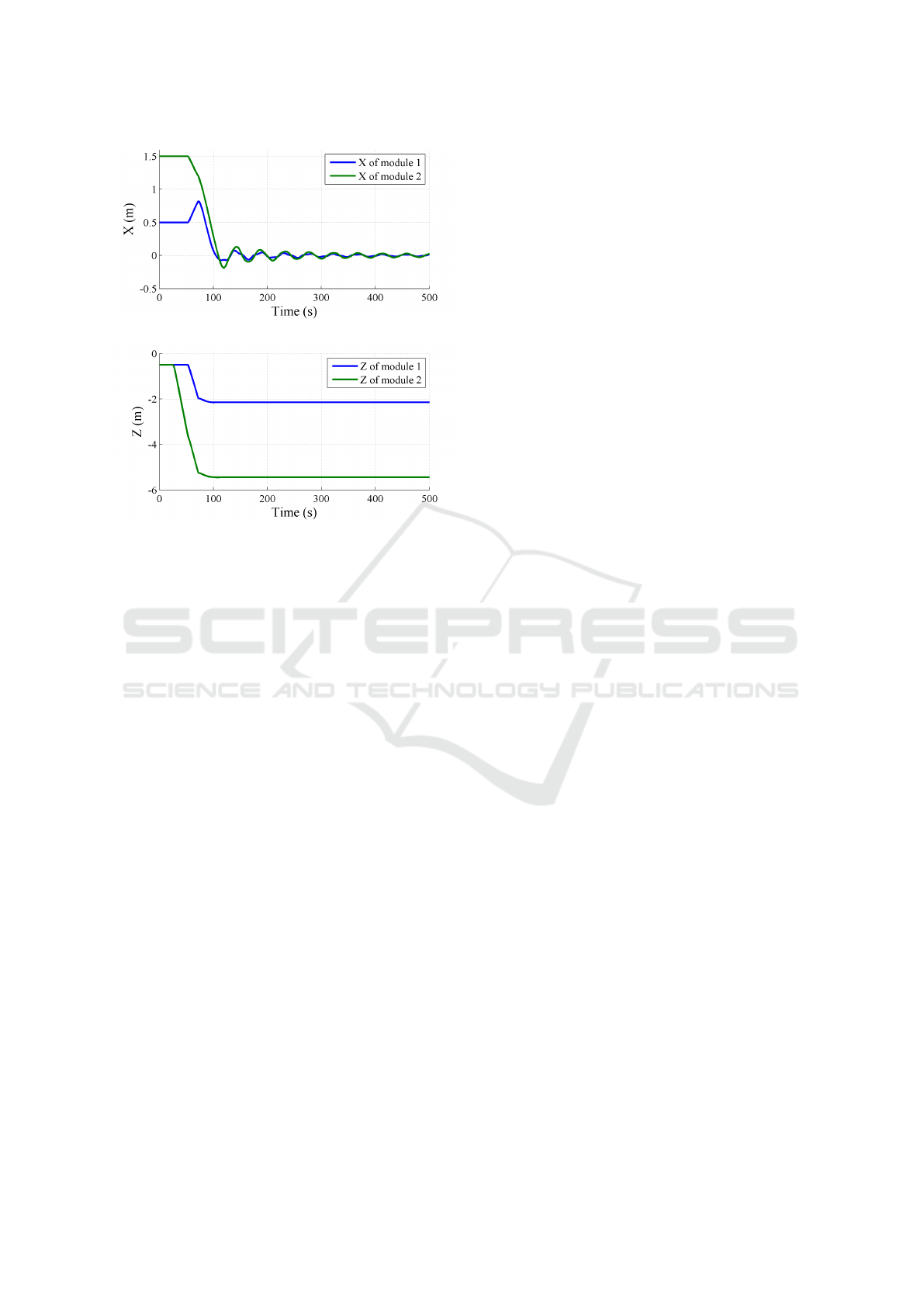
(a) Variation of X for both modules.
(b) Variation of Z for both modules.
Figure 15: Variation of position of both the modules.
module acts on the anchored module which influences
the anchored module also to travel up. Both the mod-
ules oscillate with the oscillations of cascaded module
influencing the oscillations of anchored module. The
travel of both the modules along the water column can
be seen in figure 15.
6 SUMMARY OF THE WORK
A metallic bellow based variable buoyancy system is
designed with dimensions optimally chosen based on
system requirements. The system is mathematically
modelled and the basic simulation studies shows that
the system is capable of diving to the desired depth
and surface by expanding or compressing the linear
actuator. The simulation studies also showed that the
system with some orientation in roll and pitch because
of any external disturbance will re-orient itself back
because of the restoring force created due to positions
of CoG and CoB. The terminal velocities of the sys-
tem at different positive buoyancies were studied and
it was found that at 3N positive buoyancy, the sys-
tem travels with a velocity of 0.32m/s. Experimental
results show that the mathematical model closely ap-
proximates the real system. The power consumption
study at different velocities of linear actuator shows
that, at maximum tested depth of 5m, with the max-
imum speed of linear actuator, the system consumes
an instantaneous power of about 24W. With the math-
ematical model, further simulations are carried out by
anchoring single system at a depth and by cascading
multiple such systems. The simulation studies show
that, when the system is positively buoyant, irrespec-
tive of the initial position at which it is, because of
the cable getting taught, it oscillates around the an-
chor point. When the system is at neutrally buoyant
state, the system remains at the same position unless
there is external disturbance acting on it.
7 CONCLUSIONS
The study reveals that the system is well suited for the
selective deployment applications and the ability of
them to be used as a single degree of freedom system
to have motion along heave. The study also shows
that the velocity of the system can also be controlled
by controlling the rate of change of buoyancy. Multi-
ple of such systems with individual depth control can
be cascaded and these systems can be deployed at dif-
ferent depths in the designed range.
Some issues were noticed while experiments like,
maintaining the symmetry of the bellows which re-
sulted in an unwanted tilt in the system. Also,
since two linear actuators were used, positioning them
maintaining the centre of actuation of both the bel-
lows is not possible. This can be avoided by using a
single vertical bellow based VBS. Open loop response
of the system is studied and further, the system can
be analyzed with a model based closed loop control
strategy to precisely control the depth using suitable
sensing. The depth control capabilities and perfor-
mances can be analyzed which may explore various
other applications.
REFERENCES
Fossen, T. I. (1994). Guidance and Control of Ocean Vehi-
cles.
Gianluca Antonelli (2006). Underwater Robots.
Ranganathan, T., Pattery, J., and Thondiyath, A. (2015). De-
sign and analysis of cable-connected metallic bellows
as Variable Buoyancy Modules. In 2015 IEEE Under-
water Technology (UT), pages 1–5. IEEE.
Shibuya, K. and Kawai, K. (2009). Development of a
new buoyancy control device for underwater vehicles
inspired by the sperm whale hypothesis. Advanced
Robotics, 23(7-8):831–846.
Shibuya, K. and Yoshii, S. (2013). New Volume Change
Mechanism Using Metal Bellows for Buoyancy Con-
trol Device of Underwater Robots. International
Scholarly Research Notices Robotics, 2013:1–7.
Design and Analysis of Cascaded Variable Buoyancy Systems for Selective Underwater Deployment
325

Sumantr, B. and Teknologi, U. (2008). Development of
Variable Ballast Mechanism for Depth Positioning
of Spherical URV. In International Symposium on
Information Technology (ITSim), pages 1–6, Kuala
Lumpur, Malaysia. IEEE.
Tangirala, S. and Dzielski, J. (2007). A Variable Buoyancy
Control System for a Large AUV. IEEE Journal of
Oceanic Engineering, 32(4):762–771.
Wen-de Zhao, Xu, J.-a., and Zhang, M.-j. (2010). A Vari-
able Buoyancy System for Long Cruising Range AUV
Wen-de Zhao, Jian-an Xu and Ming-jun Zhang. In
Internation Conference on Computer, Mechatronics,
Control and Electronic Engineering, pages 585–588.
Worall, M., Jamieson, A. J., Holford, A., and Neilson, R. D.
(2007). A variable buoyancy system for deep ocean
vehicles. In OCEANS 2007 - Europe, volume 44,
pages 1–6. IEEE.
Wu, J., Liu, J., and Xu, H. (2014). A variable buoyancy
system and a recovery system developed for a deep-
sea AUV Qianlong I. In Oceans 2014 - Taipei, pages
1–4. IEEE.
Wu, P. K., Fitzgerald, L. a., Biffinger, J. C., Spargo, B. J.,
Houston, B. H., Bucaro, J. a., and Ringeisen, B. R.
(2011). Zero-power autonomous buoyancy system
controlled by microbial gas production. The Review
of scientific instruments, 82(5):055108.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
326
