
Wheelchair Assistance with Servo Braking Control Considering Both
the Gravitation-Negating and the User’s Intention-based Assistance
Daisuke Chugo
1
, Nobuhiro Goto
1
, Satoshi Muramatsu
2
, Sho Yokota
3
and Hiroshi Hashimoto
4
1
Graduate School of Science and Technology, Kwansei Gakuin University, Sanda, Hyogo, Japan
2
School of Information Science and Technology, Tokai University, Hiratsuka, Kanagawa, Japan
3
Faculty of Science and Engineering, Toyo University, Kawagoe, Saitama, Japan
4
Advanced Institute of Industrial Technology, Shinagawa, Tokyo, Japan
Keywords: Manual Wheelchair Assistance, Passive Robotics, Servo Brake, Gravitation-Negating Control Algorithm,
User’s Intention-based Control Algorithm.
Abstract: This paper proposes a novel driving-assistance system for manual wheelchairs with consideration of both
uphill and downhill conditions. On an inclined road, there is a high risk of a wheelchair moving in a
direction that the user does not intend. In our previous works, the user has driven our assistive wheelchair in
the usual manner. Our proposed system estimates its user’s intentions and passively works to complement
their intentional force by negating the wheel traction that is generated by the road’s inclination using only
the servo brakes on each wheel. Nevertheless, in some cases, our system fails to assist the driving motion of
its user because the user drives the wheelchair in several ways that depend upon the environmental
condition, for example, during uphill or downhill driving. The required assistance is not constant according
to the situation, and it is difficult to assist with one wheel-control algorithm. Therefore, in this study, we
first investigate the required assistance condition according to the driving situation by conducting a
preliminary experiment with wheelchair users. Considering the results of this investigation, we then propose
a novel user interface that intuitively shows the system information and a wheel-control algorithm that
selects a suitable wheel controller according to the driving situation.
1 INTRODUCTION
Wheelchairs are widely used by mobility-impaired
people in their daily activities. In recent years, many
serious wheelchair-related accidents have been
reported. In Japan, more than 80% of wheelchair
accidents are caused by environmental hazards
(National Consumer Affairs Center of Japan, 2002).
The inclination of a sidewalk poses a potentially
high risk for a wheelchair user. The Japanese
government permits an incline in a sidewalk of up to
5°(Japan Institute of Construction Engineering,
2008). This inclination could potentially lead to a
wheelchair deviating from the sidewalk into the
roadway, which may result in collisions between
wheelchairs and cars. Therefore, a wheelchair
driving-assistance system is important for use on an
inclined sidewalk.
In previous research, many assistive technologies
for wheelchairs have been developed. Several
disabled people traditionally use power wheelchairs
(Yamaha Motor Co., Ltd., 2014) and previous
researchers have attempted to develop assistance
functions by adding wheels with actuators and
controlling them using robotic technology such as
motion control (Miller and Slack, 1995), sensing,
and artificial intelligence (Katevas et al., 1997)
(Murakami et al., 2001). These intelligent
wheelchairs provide several functions such as
suitable motion, obstacle avoidance, and navigation;
thus, they provide a maneuverable system. However,
many wheelchair users have the upper body strength
and dexterity to operate a manual wheelchair. For
these wheelchair users, such systems may be
excessively expensive and unnecessary.
Therefore, we have developed a passive driving-
assistance system for a manual wheelchair that uses
servo brakes (Chugo et al., 2015) (Chugo et al.,
2013). This system incorporates the concept of
passive robotics (Hirata et al, 2007). Our proposed
system passively operates on the basis of external
forces imposed by its user. No actuators are required
Chugo, D., Goto, N., Muramatsu, S., Yokota, S. and Hashimoto, H.
Wheelchair Assistance with Servo Braking Control Considering Both the Gravitation-Negating and the User’s Intention-based Assistance.
DOI: 10.5220/0005980503350343
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 335-343
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
335

in our system; it uses servo brakes, which can
control the brake torque, to produce the desired
motion according to the applied force and reference
track. In our previous research, we have developed
two wheel-control algorithms. One estimates the
intended direction of a manual wheelchair user by
determining the characteristics of hand motion and
maintains it as the reference track (Chugo et al.,
2013). The other simply negates the effect of
gravitational force on the wheelchair on an inclined
road (Chugo et al., 2015).
However, in some cases, these wheel controls
cannot assist in wheelchair driving, because users
row in different ways according to the
environmental situation, resulting in different
required assistance conditions. In particular, when
going uphill or downhill, a wheelchair driver uses
completely different driving techniques to control
their wheelchair. Under these conditions, our
controller cannot use only one wheel-control
algorithm. Therefore, in this study, we first
investigate how users drive their wheelchairs
according to the environmental situation and what
conditions are required for assisting these
techniques. Second, using the results of this
investigation, we propose a novel human interface
based on a hand brake and a wheel-control scheme
that combines a gravitational negating control
algorithm and a user’s intention-based control
algorithm. Using this idea, our proposed wheelchair
can continuously assist users in driving on uphill or
downhill roads.
This paper is organized as follows. We introduce
our assistive wheelchair and its problem
specification in section 2. In section 3, we propose a
novel human interface for our system and in section
4, we propose an improved driving-assistance
scheme based on the environmental situation. We
show the results of experiments using our prototype
in section 5. Section 6 presents our conclusions.
2 PROBLEM SPECIFICATION
ON OUR SYSTEM
2.1 System Configuration
Figure 1(a) shows our prototype wheelchair, which
utilizes a type of servo brake known as a powder
brake. Powder brakes are widely used in industrial
applications and their cost is low compared with
other servo brakes. The powder brake (Fig. 1(b))
(ZKG-YN50, Mitsubishi Electric Corp.) generates
enough brake torque to stop a wheelchair moving at
4 km/h, and containing a 100 kg user within 1 s. Our
prototype is based on a normal manual wheelchair
(BM22-42SB, Kawamura Cycle Co. Ltd.) and
fulfills the ISO7193, 7176/5 standards. Furthermore,
our prototype utilizes an encoder in each wheel to
measure the wheel-rotation velocity and two tilt
sensors in its body to measure roll and pitch angle
(see Fig.3).
(a) Overview (b) Installed Servo Brake
Figure 1: Our Prototype.
2.2 Problem Specifications in Daily
Usage with Our Assistive
Wheelchair Prototype
2.2.1 Preliminary Experimental Setup
Eight subjects attempted to navigate the test course
(Fig. 2) with our assistive wheelchair in order to
investigate how users drive their wheelchairs
according to different environmental situations. The
length of this course is about 1.5 km. The
experimental field is on the Kobe-Sanda Campus,
Kwansei Gakuin University, Japan. Our campus is
located atop a hill and this test course has uphill and
downhill roads to easily investigate problems with
our assistive system.
In this preliminary experiment, our system offers
assistance using two wheel-control algorithms; one
is a gravitation-negating control algorithm (Chugo et
al., 2015) and the other is a user’s intention-based
control algorithm (Chugo et al., 2013). In both cases,
our wheelchair system records all logs measured by
the equipped sensors and outputs brake traction
information. Furthermore, we record the subject’s
motion with a video camera during this experiment.
This preliminary experiment includes eight subjects
(Table 1), six wheelchair users and two able-bodied
people including a nursing specialist and a student.
Each subject tries one round using each algorithm.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
336

Flat
Uphill
Downhill
Flat (In school
cafeteria)
Start and
Goal position
100m
Figure 2: A test course for the preliminary experiment.
Table 1: Subjects.
Subject Age Sex
Weight
(kg)
Dominant
hand
Wheelchair
User*
A 66 Male 54 Right Yes
B 72 Male 62 Right Yes
C 68 Male 73 Left Yes
D 67 Female 51 Right Yes
E 74 Female 49 Left Yes
F 35 Male 81 Right Yes
G 39 Male 75 Right No
H 21 Male 59 Right No
* A subject who uses a manual wheelchair in daily life.
2.2.2 Problems at the User Interface
Table 2 shows major problems in this preliminary
experiment. Problem nos. 1, 2, and 3, which occur in
both control algorithms, can be solved by an update
of the user interface. For example, as problem no. 1,
the subject pushes the start button of our assistive
wheelchair system and tries to row its hand rim.
However, as the subject moves their hand from the
button to the rim, the wheelchair moves under
gravitational force on an inclined road. Furthermore,
as problem no. 2, our system stops the wheelchair
for safety reasons and an LED alerts the user that the
emergency brake is now working. However, on
many occasions, users cannot recognize this alert
and try to continue to drive the wheelchair.
Questionnaire results show that many subjects feel
that the system information is indistinct.
2.2.3 Problems with the Gravitation-
Negating Control Algorithm
Problem no. 4 is caused by the gravitation-negating
Table 2: Results of the Preliminary Experiment.
No
Contr
ol* Major Problems (Times)
Subjects
A B C D E F G H
1 I
The wheelchair moves by the
gravitational force after the user
pushes the start button. 1 2 1 1 2 1 1 0
2
I The user tries to move the
wheelchair when our system
stops by emergency brakes.
3 4 3 2 6 2 2 0
G 2 3 3 2 4 3 1 1
3
G The wheelchair moves by the
gravitational force after the user
switch off our system.
1 1 1 1 1 1 1 1
I 1 1 1 1 1 1 1 1
4 G
The user feels the wheelchair is
too heavy on an uphill situation.
(In some cases, the user cannot
go by own physical strength.) 6 7 7 10 14 4 6 3
5 I
The user cannot go the intended
direction on a downhill
situation. 8 7 8 9 11 6 7 1
6a I
Our system misjudges its user’s
intention. 9 5 8 8 11 8 8 4
6b I
Our system misapplies
emergency brakes. 3 3 2 3 3 2 2 0
* G is a gravitation-negating control algorithm and I is a user’s
intention-based control algorithm.
wheel-control algorithm. This wheel-control
algorithm negates the effect of the gravitational
force on the wheelchair on an inclined road. When
the user goes uphill on a road as in Fig. 3, the
wheelchair moves to a lower direction because of
the gravitational force on the inclined road. In this
condition, without an assistance system, a manual
wheelchair user should row the left wheel hard as
rl
ff >
in Fig. 3(a) (where
r
f
is the row force at the
right wheel,
l
f
is the row force at left wheel.)
y
z
y
x
f
l
f
r
f
r
, f
l
θ
γ
y
x
f
gl
f
gr
γ
f
cl
The wheelchair tends to
move this direction
because of the gravity.
(a) Side view (b) Top view without assistance (c) Top view with assistance
Figure 3: Brake tractions on an inclined road.
To negate this gravitational force, our wheelchair
controls the servo brake according to (1) and (2),
where
(
)
gg
yx ,
is the position of the center of gravity,
m is mass of the wheelchair and T is the width
between the wheels. Details regarding this calculation
were given in our previous paper (Chugo et al., 2015).
Wheelchair Assistance with Servo Braking Control Considering Both the Gravitation-Negating and the User’s Intention-based Assistance
337
()
()
elsef
ffif
x
T
mgy
mg
f
cr
clcr
g
g
cr
0
2
sin
sin
2
=
>
−
+=
γ
θ
(1)
()
()
elsef
ffif
x
T
mgy
mg
f
cl
clcr
g
g
cl
0
2
sin
sin
2
=
<
−
−=
γ
θ
(2)
In the case of Fig. 3(b), our system generates the
brake traction,
cl
f
, on a left wheel to negate the
gravitational force that leads the wheelchair to a
lower direction (a right direction). In this case, our
wheelchair user should row each wheel equally as
grgl
ff =
(where
gr
f
is the row force at the right
wheel with our assistance and
gl
f
is the row force at
the left wheel with our assistance). This means that
the user can row the wheelchair as if on a flat road;
however, a passive system does not assist the force
and the required row force increases with the brake
force,
cl
f
, on the left wheel. Therefore, the users
feel as if the wheelchair is too heavy in an uphill
situation during this preliminary experiment.
2.2.4 Problems with the User’s
Intention-based Control Algorithm
Problem nos. 5, 6a, and 6b are caused by the user’s
intention-based algorithm. This algorithm uses
knowledge of neurophysiology in the form of the
minimum jerk trajectory model (Seki and Tadakura,
2004), which expresses the characteristics of hand
motion. According to this model, hand motion is
defined by equations (3) and (4), where x is the
position of the wheelchair,
0
x
is the initial position,
and
0
t
is the time when the user starts to row the
hand rim.
()
(
)
(
)
()
()
()
()
133
2
1683
10156
23
2
0
0
234
00
345
00
+−+−−+
+−+−−+
+−−+=
mmm
mmm
mmmf
ttttt
x
tttttx
tttxxxtx
(3)
()
fm
tttt
0
−=
(4)
In this model, unknown values include the end
position,
f
x
, and the final time,
f
t
. This algorithm
estimates two values by determining the
characteristics of hand motion when the user starts
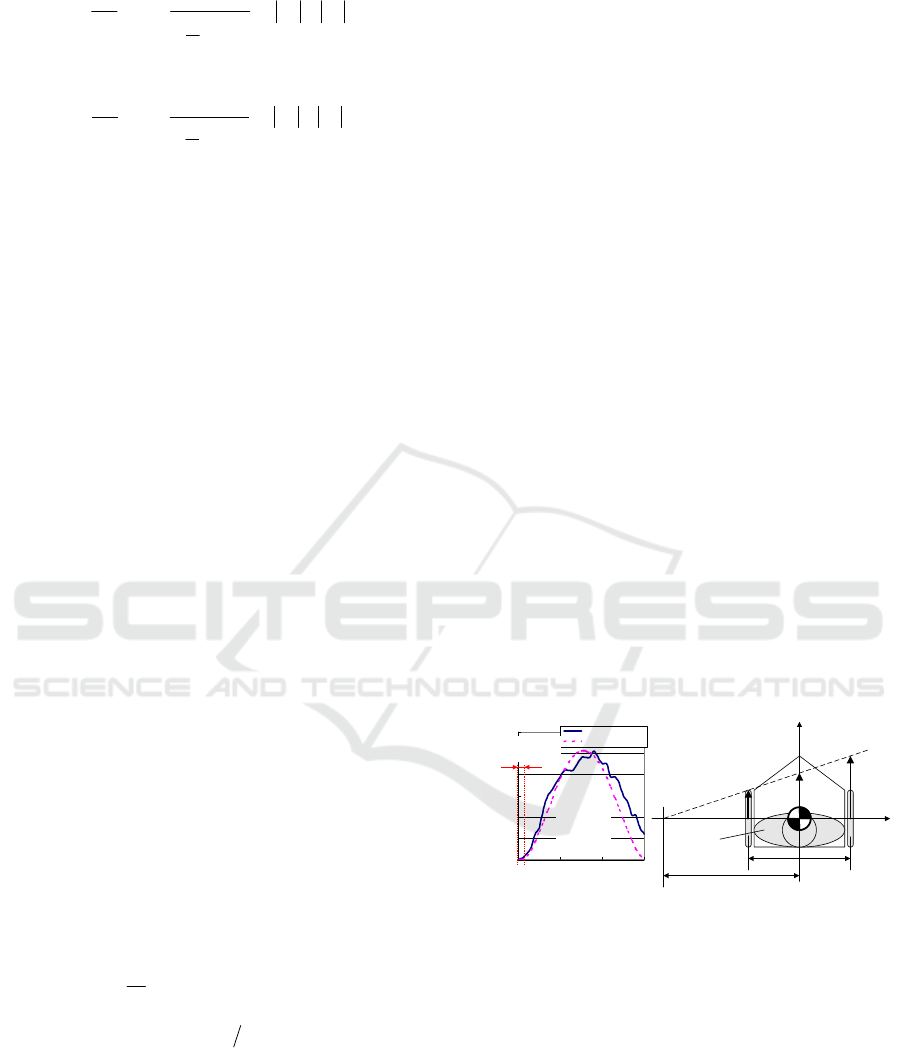
to row a hand rim (at 0.1 sec). Figure 4(a) shows the
wheel velocity and the estimated movement using
this model. According to this method, our system
estimates the velocity of each wheel (
r
v
: velocity of
the right wheel,
l
v
: velocity of the left wheel) and
evaluates the intended direction of a manual
wheelchair user as Fig. 4(b). After estimation, the
system maintains the reference track that is
estimated until its user rows the wheel again. Details
regarding this algorithm were given in our previous
paper (Chugo et al., 2013).
However, in problem no. 5, our system fails to
assist when its user changes its movement direction
on a downhill road. When a user goes down an
inclined road, they turn by grasping a hand rim as a
brake, rather than by rowing the hand rim. The
control algorithm estimates the intended direction of
the user only when they accelerate the wheelchair by
their hand motion. When the user tries to change the
running direction by grasping a hand rim, our
assistive wheelchair controls the brake traction for
maintaining the reference track when the user
accelerates. Therefore, the assistance brake traction
by this wheel controller interferes with its user’s
intention.
Problem nos. 6a and 6b are parameter-setting
problems concerning how much error our system
accepts at the estimation of a user’s row motion. If
our system does not accept a larger error, its wheel-
control accuracy will increase; however,
misjudgement will also increase because of a
wheelchair vibration due to the unevenness of a road
surface. Thus, this is a trade-off problem.
0
0.1
0.2
0.3
0.4
0.5
0.6
0123
Time (sec)
Velocity (m/sec)
Expe riment
Minimum Jerk Model
Estimation
Time (0.1s)
Estimation
velocity fits
the real
velocity
profile.
T
Wheelchair
x
y
R
Human
v
l
v
r
v
(a) Minimum jerk model (b) Kinematics of our wheelchair
Figure 4: A user’s intention-based control algorithm.
3 PROPOSED USER INTERFACE
Based on the results of a questionnaire administered
to the subjects and the opinions of the nursing
specialist, the user interface of the assistive
wheelchair should have the following conditions:
The input device should be equipped around a
hand rim, because the user activates the
assistive device and then rows a hand rim.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
338

Therefore, the distance between the input
device and the hand rim should be small.
Subjects require very little information, namely
(1) whether a driving-assistive system works or
does not work, and (2) whether an emergency
brake works. Thus, its user interface should
clearly show this information.
Therefore, we propose a novel user interface
based on a hand brake as shown in Fig. 5.
Fb
Fm
Hook operated
by a Solenoid
Brake Pad
Driving
Assistance
is ON.
Driving Assistance is
OFF or an emergency
brake works.
Figure 5: A proposed user interface based on a hand brake.
Usually, a wheelchair user takes off a hand brake
when they drive, and then puts it back on when they
stop. Therefore, our system can determine the
intention of its user by the position of the hand brake.
The proposed user interface is quite simple; when
the user takes off a proposed hand brake interface,
our system starts offering driving assistance, and
when they put on a hand brake, our system stops
offering assistance. Furthermore, when our system
uses an emergency brake, this hand brake interface
moves to the off position automatically so that its
user can know easily that the emergency brake is
working.
The proposed hand brake uses a spring as in Fig.
5. A spring connected to a hand brake pulls it into
the off position. When a hand brake is in this
position, it pushes the brake pad to the wheel with
()
NF
b
14≈
, and this force is the same as that of a
typical hand brake on a general manual wheelchair.
When the user switches our system on, they turn the
hand brake interface to the on position. There is a
hook with a rotational spring (Fig. 6) at this position
that holds this hand brake in place. The force
required to turn our system off is
()
NF
m
8.0<
,
which is a light load for a manual wheelchair user.
When our system uses an emergency brake, a
solenoid equipped on a hook works as shown in Fig.
6(b) and releases the hand brake. The hand brake is
backed to the off position by the spring. Figure 7
shows our prototype hand brake interface, which
moves to the switch off position automatically.
The proposed hand brake interface works as a
normal hand brake, meaning the user can simply
replace an original hand brake on a general
wheelchair with the proposed hand brake interface.
This mechanism fulfills the ISO7193, 7176/5
standards and can be installed on a general
wheelchair without any special reconstruction.
Solenoid OFF
Solenoid ON
Rotational
Spring
Brake Lever
(a) The solenoid is off.
(b) The solenoid is on.
Figure 6: A hook operated by a solenoid.
(a) The hand brake is off.
(b) The hand brake is on.
Figure 7: A prototype of a proposed hand brake interface.
4 PROPOSED WHEEL CONTROL
ALGORITHMS
4.1 Combination of the
Gravitation-Negating Control
Algorithm and the User’s
Intention-based Control Algorithm
From the results of a preliminary experiment, the
major driving techniques and required assistance
conditions for the wheelchair user are as follows.
The wheelchair driving technique consists of
two phases—a rowing phase and an inertial
running phase.
In the rowing phase, the load should be small,
especially in an uphill situation. Based on the
opinions of the wheelchair users in the
preliminary experiment, no brake traction is
felt to be better than gravitational cancellation.
Wheelchair Assistance with Servo Braking Control Considering Both the Gravitation-Negating and the User’s Intention-based Assistance
339

The nursing specialist thinks that when the
wheelchair goes in an uphill direction, its user
concentrates on rowing its hand rim and
cancels the gravitational force unconsciously
due to inclination. The gravitational
cancellation makes users spend their physical
strength on the brake traction.
In the rowing phase on a downhill situation, the
gravitational force should be removed for safe
driving. Based on the opinions of wheelchair
users, on a downhill road, the required force to
row is small and the wheelchair tends to
deviate from the intended direction of its user
due to gravitational force, and users report
fearing this motion.
In the inertial running phase, the wheelchair
deviates from the intended track due to the
gravitational force; therefore, driving
assistance is necessary. However, in many
cases, wheelchair users grasp the hand rim and
change the running direction.
Therefore, we propose a novel wheel-control
scheme that combines the gravitation-negating
control algorithm and the user’s intention-based
control algorithm as follows.
For reducing the required physical strength in
an uphill situation, our system uses the user’s
intention-based control algorithm during the
rowing phase.
For the same reason, on a flat floor situation,
our system uses the user’s intention-based
control algorithm during the rowing phase.
To increase the driving ability in other
situations, our system uses a gravitation-
negating control algorithm during the rowing
and inertial phases on a downhill road and the
inertial phases on uphill and flat roads.
For safety reasons, when the wheelchair
accelerates in all situations, our system judges
whether this acceleration is done by human
rowing motion. If not, our system turns on an
emergency brake.
When our system switches to a different
control algorithm, it controls the brake traction,
ref
τ
, according to (5) to prevent sudden
change:
()
()
()
()
⎪
⎪
⎩
⎪
⎪
⎨
⎧
→+
−
→+
−
=
GIif
t
t
t
tt
IGif
t
t
t
tt
s
g
s
si
s
i
s
sg
ref
τ
τ
τ
τ
τ
(5)
where
g
τ
is the brake-traction reference derived by a
gravitation-negating control algorithm (Chugo et al.,
2015) and
i
τ
is a reference by the user’s intention-
based control algorithm (Chugo et al., 2013).
s
t
is
the switching time between the two control
algorithms, which we set to 0.1 s in this study.
IG →
means that our system switches from a
gravitation-negating control algorithm to a user’s
intention-based control algorithm.
Figure 8 shows the details of the proposed
algorithm. Our system measures the road inclination,
θ
, using a tilt sensor and evaluates the uphill or a
downhill condition.
START
Does the wheelchair
accelerate?
Does the acceleration fit
the characteristics oh a
human movement?
Does the road incline?
A gravitation negating
control algorithm
A user's intention based
control algorithm
Emergency
Brake
A downhill
An uphill or a flat
Does the wheelchair re-
accelerate?
Does the wheelchair re-
accelerate?
No
Yes Yes
No
Yes
No Yes
No
Figure 8: Flow chart of our proposed control scheme.
4.2 Parameter Setting for Estimation of
a User’s Rowing Motion
Our system judges that wheelchair acceleration is
caused by human rowing motion if the difference
between the real velocity and human movement
profiles is less than the pattern-matching parameter,
0
c
, in the user’s intention-based control algorithm
(Chugo et al., 2013). However, the parameter should
change according to the road condition.
In the preliminary experiment, the wheelchair
accelerates 3,700 times; 3,043 of these are caused by
the user’s rowing motion. Our system evaluates these
accelerations with various parameters and the
evaluation results are presented in Fig. 9. The false
positive error is the misjudgement of human motion
as acceleration by some other source and the false
negative error is the misjudgement of the acceleration
by other sources as being due to human motion. From
the results, our system can distinguish between being
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
340

indoors or indoors based on unevenness in a road
surface, and uses
0.3
0
=c
in an outdoor environment
and
0.2
0
=c
in an indoor environment.
0%
20%
40%
60%
80%
100%
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Threshold (C
0
)
Rate [%]
Negative Failure
Positive Failure
Success
0%
20%
40%
60%
80%
100%
0.511.522.533.544.55
Threshold (C
0
)
Rate [%]
Negative Failure
Positive Failure
Success
(a) Asphalt surface (outdoor) (b) Linoleum floor (indoor)
Figure 9: Success rate with each pattern-matching
parameter.
5 EXPERIMENTS
5.1 Experimental Setup
We tested our system’s performance in two
experiments. In the first experiment, the subjects
move from side to side in a figure of eight on a test
road with an 8° incline using our prototype
wheelchair with the proposed controller (Case P) as
in Fig. 10. In this course, (I), (III), and (V) in Fig.
10(a) are uphill and (II) and (IV) are downhill. To
verify the controller’s effectiveness, the subjects
repeated this activity in wheelchairs without the
system (Case N), with only a gravitation-negating
control (Case G) and with only the user’s intention-
based control (Case I). The subjects are the same as
those of the preliminary experiment as shown in
Table 1. In the second experiment, subjects try the
test course shown in Fig. 2 with our proposed
system. All experimental conditions are the same as
in the preliminary experiment.
8deg
y
x
2m
4m
Start and Goal
Position
(I)
(III)
(II)
(IV)(V)
X
y
(a) Test course (b) Real environment.
Figure 10: Test course on an inclined road.
5.2 Experimental Results
The results show that the subjects could drive in an
intended direction when using our system (Fig. 11).
Figure 12 shows the running tracks of the
wheelchair. With the proposed assistance system,
the subject can drive the wheelchair smoothly. On
the other hand, in case I, it is difficult to change the
forward direction on a downhill situation and in case
G, the brake traction that negates the gravitational
force increases the load in uphill situations and it is
difficult for the subject to climb in the vertical
direction. As a result, in case G, the subject makes a
detour.
(a) Passing (II) (b) Passing (III)
(c) Passing (III) to (IV) (d) Passing (IV)
Figure 11: Test run with our proposed controller by
subject H.
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
-10123456789
[m]
[m]
Proposed Scheme
O nly Inte ntion
Only Gravity
Without Assistance
The subject cannot change its
direction at Case I.
A hand rim is too heavy and
the subject cannot climb to the
vertical direction at Case G.
The wheelchair deviates to the
intended direction by the
gravity force at Case N.
Moving direction
Pole
Pole
Figure 12: Running tracks by subject H.
Figure 13 shows the brake traction differences
between the right and left wheels. A positive value
means that a brake traction on the right wheel is
generated and our system negates a gravitational
force to the left direction. A negative value implies
the opposite. In Fig. 13, for example, when a
wheelchair passes (I), our system negates a
gravitational force to the right direction; thus, the
traction value is negative. On the other hand, the
Wheelchair Assistance with Servo Braking Control Considering Both the Gravitation-Negating and the User’s Intention-based Assistance
341

traction value is zero when the subject rows a hand
rim because at this time, our system uses the user’s
intention-based control algorithm. Furthermore,
Table 3 shows the workload that a subject outputs
during one trial. Our proposed scheme requires only
the workload of the user’s intention-based control
algorithm. From these results, our proposed control
scheme realizes a gravitation-negating function with
a smaller workload.
Table 4 shows the experimental results with our
proposed user interface and the proposed controller
on the test course shown in Fig. 2. The proposed
user interface works effectively and settles major
problem nos. 1, 2, and 3. The subjects can use the
proposed interface without difficulties. The
proposed control scheme settles major problem nos.
4 and 5. Subjects D and E are women with
-100
-50
0
50
100
0 5 10 15 20 25
Time [sec]
Torque [Nm]
I
II
III
IV
V
The system switches to an
intention based control and stops
to negate the gravity force.
-100
-50
0
50
100
0 5 10 15 20 25
Time [sec]
Torque [Nm]
I
II
III
IV
V
The system switches to an
intention based control and stops
to negate the gravity force.
Figure 13: Brake traction differences in case P by subject
H.
Table 3: Workload for one trial (J).
Subject
A B C D E G H
Proposed Scheme 457.1 445.6 498.4 403.2 418.5 453.7 447.0
Only Intention 442.6 428.6 471.1 389.2 398.2 424.6 426.1
Only Gravity 523.4 493.5 552.1 427.5 466.2 479.1 501.4
Table 4: Results on a test course with the proposed system.
No Major Problem (Times)
Subjects
A B C D E F G H
1
The wheelchair moves by the
gravitational force after the user pushes
the start button. 0 0 0 0 0 0 0 0
2
The user tries to move the wheelchair
when our system stops by emergency
brakes. 0 0 0 0 0 0 0 0
3
The wheelchair moves by the
gravitational force after the user switch
off our system. 0 0 0 0 0 0 0 0
4
The user feels the wheelchair is too
heavy on an uphill situation. 0 0 0 3 2 0 0 0
5
The user cannot go the intended direction
on a downhill situation. 0 0 0 0 0 0 0 0
6a Our system misjudges its user's intention. 1 0 0 1 0 0 0 0
6b
Our system misapplies emergency
brakes. 2 1 1 2 2 0 1 1
somewhat less physical strength in their hands who
feel that an uphill road is a heavy load using a
normal manual wheelchair. Although the accuracy
of rowing motion-estimation increases, there are
some errors due to small steps.
From these results, we can verify that our
proposed system is effective for assisting a manual
wheelchair.
6 CONCLUSIONS
This paper presents an investigation into the way
wheelchair drivers operate in various environmental
conditions. We explore several assistance strategies
that are appropriate to the various operating modes
that the wheelchair driver presents with in these
conditions. By this investigation, we propose a novel
human interface based on a hand brake and a wheel-
control scheme that combines a gravitational
negating control algorithm and a user’s intention-
based control algorithm. Using this idea, our
proposed wheelchair can continuously assist users in
driving on uphill or downhill roads. Its effectiveness
in daily usage is verified by experimental results
with our prototype.
ACKNOWLEDGEMENTS
This work is supported in part by Kawanishi
Memorial ShinMaywa Education Foundation and
Exploratory Research on Feasibility Study (FS)
Stage (AS242Z00295K) by Adaptable and Seamless
Technology Transfer Program through Target-driven
R&D, Japan Science and Technology Agency (JST).
REFERENCES
National Consumer Affairs Center of Japan, 2002.
Considering the safety of self-propelled manual
wheelchairs, In NCAC News, Vol.14, No.3, pp.4.
Japan Institute of Construction Engineering, 2008. A
Sidewalk guideline for smooth mobility, 2nd edition,
ISBN: 4802893922. (in Japanese).
Yamaha Motor Co., Ltd., 2014. JW Swing,
http://global.yamaha-motor.com/ymgn/group_topics/2014/11_03/
D. P. Miller and M. G. Slack, 1995. Design and Testing of
a Low-Cost Robotic Wheelchair Prototype, In
Autonomous Robots, Vol.2, pp.77-88.
N. I. Katevas, et al., 1997. The Autonomous Mobile Robot
SENARIO: A Sensor-Aided Intelligent Navigation
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
342

System for Powered Wheelchairs, In IEEE Robotics
and Automation Magazine, Vol.4, No.4, pp.60-70.
Y. Murakami, Y. Kuno, N. Shimada and Y. Shirai, 2001.
Collision avoidance by observing pedestrian’s faces
for intelligent wheelchairs, In Proc. of Int. Conf. on
Intelligent Robots and Systems, pp.2018-2023.
D. Chugo, N. Goto, S. Muramatsu, S. Yokota, and H.
Hashimoto, 2015. Robotic Driving Assistance System
for Manual Wheelchair User on Uneven Ground, Proc.
of 2015 IEEE Int. Conf. Rehab. Robot, pp.648–653.
D. Chugo, T. Higuchi, Y. Sakaida, S. Yokota, and H.
Hashimoto, 2013. A Driving Assistance System for a
Manual Wheelchair using Servo Brakes, Proc. of 10th
Int. Conf. on Informatics in Control, Automation and
Robotics, pp.259-266.
Y. Hirata, A. Hara and K. Kosuge, 2007. Motion Control
of Passive Intelligent Walker Using Servo Brakes, In
IEEE Trans. on Robotics, Vol.23, No.5, pp.981-990.
H. Seki and S. Tadakura, 2004. Minimum Jerk Control of
Power Assisting Robot based on Human Arm
Behavior Characteristics, In Proc. of IEEE Int. Conf.
on Systems, Man and Cybernetics, pp.722-727.
Wheelchair Assistance with Servo Braking Control Considering Both the Gravitation-Negating and the User’s Intention-based Assistance
343
