
Application of Trajectory Optimization Method for a Space
Manipulator with Four Degrees of Freedom
Tomasz Rybus
1
, Karol Seweryn
1
and Jurek Z. Sąsiadek
2
1
Space Research Centre (CBK PAN), Bartycka 18a, Warsaw, Poland
2
Department of Mechanical and Aerospace Eng., Carleton University, Ottawa, Ontario, Canada
Keywords: Space Robotics, Free-floating Space Manipulator, Trajectory Optimization, On-orbit Servicing.
Abstract: Planned active debris removal and on-orbit servicing missions require capabilities for capturing objects on
Earth’s orbit, e.g., by the use of a manipulator. In this paper we demonstrate the application of a trajectory
optimization algorithm for free-floating satellite-manipulator systems in two cases: a planar system with
2 degrees of freedom manipulator and a spatial system with a manipulator having four degrees of freedom.
For the case with planar system, results of experiments performed on an air-bearing microgravity simulator
are shown. Quadratic norm connected with the power consumption of manipulator motors has been used as
a cost functional that is minimized. Optimal trajectories are compared with straight-line trajectories and it is
shown that the optimization allows reduction of the power use of manipulator motors (for the planar system
30 trajectories based on randomly selected initial and final end-effector positions were analysed and the cost
functional was, on average, reduced by 49.4%). The presented method could be modified by using cost
functional that would, e.g., minimize disturbance on the satellite.
1 INTRODUCTION
Capabilities for capturing objects on Earth’s orbit by
unmanned satellites are required in planned active
debris removal and on-orbit servicing missions.
European Space Agency (ESA) is studying the
concept of active debris removal to prevent
predicted growth of space debris population on Low
Earth Orbit. Studies show that current debris
population is likely to increase due to collisions
between existing space debris (Liou, Johnson, and
Hill, 2010). Thus, removal of large intact objects
from orbit might be necessary in the coming years.
On-orbit servicing missions are proposed to prolong
the operational lifetime of satellites. Repairing
satellite with unmanned servicing vehicle could be
economically feasible (Sullivan and Akin, 2012).
Specific active debris removal and on-orbit servicing
missions have been proposed in recent years, e.g., by
Hausmann et al. (2015). Many of the proposed
mission concepts rely on the use of a manipulator for
performing capture manoeuvre.
Design of a manipulator for orbital operations is
a challenging task, since such manipulators are
complex mechatronic systems that must operate in
space environment and must have a very low mass.
Control of a satellite-manipulator system during
capture manoeuvre is also one of the major
challenges in on-orbit servicing. The motion of the
manipulator influences both the position and the
orientation of the manipulator-equipped satellite.
This effect must be taken into account during
manipulator trajectory planning and control.
Reaction torques and forces induced by the motion
of the manipulator must either be fully compensated
by the guidance, navigation and control subsystem
(GNC) of the satellite or this subsystem must be
switched off during the manoeuvre. In the latter
case, the satellite is in free-floating state (Dubowsky
and Papadopoulos, 1993).
In our study we focus on the subject of end-
effector trajectory planning for a free-floating
manipulator. Methods that allow optimization of
planned trajectory are especially interesting and
several approaches to optimal trajectory planning
and control were developed in the last decade, e.g.,
by Aghili (2008) and Flores-Abad et al. (2014a).
Another benefit of optimization techniques is that
they could also be used to minimize manipulator
disturbances on the manipulator-equipped satellite
(Kaigom, Jung and Rossmann, 2011). The broad
review of on-orbit servicing technologies presented
92
Rybus, T., Seweryn, K. and S ˛asiadek, J.
Application of Trajectory Optimization Method for a Space Manipulator with Four Degrees of Freedom.
DOI: 10.5220/0005981000920101
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 1, pages 92-101
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

by Flores-Abad et al. (2014b) includes a section
devoted to trajectory planning. In our paper we
follow the approach for optimal trajectory planning
that was proposed by Seweryn and Banaszkiewicz
(2008). This approach is based on the Generalized
Jacobian Matrix (GJM), introduced by Umetani and
Yoshida (1989) for systems with zero linear and
angular momentum. Seweryn and Banaszkiewicz
extended GJM for systems with non-zero and not-
conserved linear and angular momentum (e.g., with
additional forces from thrusters acting on the
satellite during the realization of the end-effector
trajectory). They proposed an optimization
algorithm that is based on the calculus of variations.
The cost functional trades off for power use of
motors in the manipulator joints as well as for
additional conditions constraining the end-effector
motion. Rybus, Seweryn and Sąsiadek (2016)
presented several improvements to this algorithm,
the most important being the modification of the
boundary conditions of the optimization problem to
allow imposing constraints for the end-effector
velocity. During the capture manoeuvre the end-
effector velocity at the moment of grasping must
match the velocity of the grasping point on the target
satellite; thus, it is required to define the final end-
effector velocity during the trajectory optimization.
The original algorithm was also extended to include
the time of the manipulator motion as a parameter
that is optimized. As a result, it is possible to
compute the optimal time for the capture
manoeuvre. The trajectory optimization algorithm is
suitable for a general case of a manipulator with n
degrees of freedom, but Rybus, Seweryn and
Sąsiadek (2016) illustrated the presentation of their
algorithm with only a simple example (i.e. a planar
manipulator with 2 degrees of freedom).
In this paper we demonstrate the use of the
aforementioned algorithm for the optimization of
end-effector trajectory of a spatial manipulator with
4 degrees of freedom, mounted on a free-floating
satellite. As torques required to position the end-
effector are much higher than torques needed for
obtaining the desired end-effector orientation, we do
not consider the optimization of end-effector
orientation. In the presented numerical example we
use mass and geometrical properties of the prototype
robotic arm WMS1 LEMUR presented by Seweryn
et al. (2014). WMS1 LEMUR has 7 degrees of
freedom: four joints are responsible for obtaining the
end-effector position (one joint is redundant) and
three joints are responsible for obtaining the end-
effector orientation. In this study we use the
trajectory planning algorithm for the first four joints.
Demonstrating that the optimization method
proposed by Seweryn and Banaszkiewicz (2008) and
extended by Rybus, Seweryn and Sąsiadek (2016)
can be successfully used for a real spatial
manipulator is the main contribution of this paper.
Following Rybus and Seweryn (2015), we also
present the results of an experimental study, in
which trajectory optimization was performed for a
real planar free-floating system with a manipulator
with 2 degrees of freedom. The planar air-bearing
microgravity simulator described by Rybus et al.
(2013) was used for this purpose. In order to assess
the advantages of the optimization algorithm in this
simplified planar case we compared the optimal
trajectory with a straight-line trajectory for 30
randomly selected initial and final positions of the
end-effector.
The paper is organized as follows. In Section 2,
equations describing the dynamics of a free-floating
satellite-manipulator system are presented, while the
trajectory optimization algorithm is shown in
Section 3. Equations contained in these two sections
were earlier presented by Rybus, Seweryn and
Sąsiadek (2016). The results of experiments
performed on the microgravity simulator are shown
in Section 4. Application of the optimization
algorithm for the manipulator with 4 degrees of
freedom is presented in Section 5. Discussion is
presented in Section 6 and the paper concludes with
Section 7.
2 FREE-FLOATING
SATELLITE-MANIPULATOR
SYSTEMS
A free-floating satellite equipped with a manipulator
with n degrees of freedom is presented in Fig. 1,
where coordinate systems and selected geometrical
parameters of the satellite-manipulator system are
shown. In this section we follow the approach
presented by Seweryn and Banaszkiewicz (2008)
and by Rybus, Seweryn and Sąsiadek (2016).
All equations are expressed in the inertial
reference frame (denoted as CS
ine
in Fig. 1). The
end-effector position is expressed as:
∑
=
++=
n
i
iqsee
1
lrrr
,
(1)
where r
s
is the position of the satellite center of
mass, r
q
is the position of the first kinematic pair of
the manipulator with respect to the satellite, and l
i
is
Application of Trajectory Optimization Method for a Space Manipulator with Four Degrees of Freedom
93

the position of the i+1 kinematic pair in respect to
the ith kinematic pair.
Figure 1: A schematic view of the satellite-manipulator
system.
End-effector linear and angular velocities are given
by the following equation:
θJ
ω
v
J
ω
v
M
s
s
s
ee
ee
+
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
,
(2)
where:
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
I0
rI
J
T
see
s
_
~
,
(3)
() ( )
⎥
⎦
⎤
⎢
⎣
⎡
−×−×
=
n
neenee
M
kk
rrkrrk
J
1
11
(4)
In the above equations v
s
and ω
s
are the linear and
angular velocities of the satellite,
θ
is the n-
dimensional vector containing angular velocities of
the manipulator joints, J
S
is the Jacobian of the
satellite (6 x 6 matrix), while J
M
is the standard
Jacobian of a non-space manipulator expressed in
the inertial reference frame (6 x n matrix), I denotes
the identity matrix, 0 denotes the zero matrix,
r
ee_s
= r
ee
– r
s
, ~ denotes a matrix which is equivalent
of a vector cross-product, k
i
and r
i
are the unit
vector of angular velocity and the position of the ith
kinematic pair, respectively. The angular momentum
of the satellite-manipulator system can be expressed
as:
PrLL ×+=
s0
,
(5)
where L
0
is the initial angular momentum of the
system. The momentum P and the angular
momentum of the satellite-manipulator system are
given by the following equation:
⎥
⎦
⎤
⎢
⎣
⎡
=+
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
×+
am
m
s
s
s
f
f
θH
ω
v
H
PrL
P
32
0
,
(6)
where:
⎥
⎦
⎤
⎢
⎣
⎡
++
=
BrEArB
BA
H
ss
T
~~
2
(7)
⎥
⎦
⎤
⎢
⎣
⎡
+
=
DrF
D
H
s
~
3
(8)
Here it should be noted that the matrices H
2
i H
3
are
influenced not only by the state of the manipulator,
but also by the state of the satellite. The submatrices
A, B, D, E and F are defined as:
IA
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+=
∑
=
n
i
is
mm
1
,
(9)
s_q
n
i
is
mm rB
~
1
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+=
∑
=
,
(10)
∑
=
=
n
i
Tii
m
1
JD
,
(11)
()
∑
=
++=
n
i
si
T
siiis
m
1
__
~~
rrIIE
,
(12)
()
∑
=
+=
n
i
TisiiRii
m
1
_
~
JrJIF
,
(13)
where r
s_q
= r
s
– r
q
and r
i_s
= r
i
– r
s
, m
s
and I
s
are the
mass and inertia matrix of the satellite, respectively,
m
i
and I
i
are the mass and inertia matrix of ith
manipulator link, respectively, J
Ti
is the translational
component of the manipulator Jacobian J
M
, while J
Ri
is the rotational component of this Jacobian. In a
free-floating system, the linear and the angular
momentum are usually assumed as zero. Such
assumption was taken, e.g., by Dubowsky and
Papadopoulos (1993), Umetani and Yoshida (1989),
and Lindberg, Longman, and Zedd (1993).
However, in the approach introduced by Seweryn
and Banaszkiewicz (2008) and presented herein, the
momentum and angular momentum are not equal to
zero. Instead, in eqn. (6) the momentum and the
angular momentum are described by the time
dependent functions f
m
and f
am
defined as:
∫
= dt
sm
Ff
and
∫
+= dt
sssam
FrHf
~
, where F
s
and H
s
are forces and torques acting on the satellite. These
could be forces and torques generated by the satellite
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
94

manoeuvring thrusters or external disturbances (e.g.,
forces and torques resulting from the gravity
gradient).
The end-effector velocity is:
()
θHHJJ
f
f
HJ
ω
v
3
1
2
1
2
−−
−+
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
sM
am
m
s
ee
ee
.
(14)
The following equation relates the angular velocities
of joints with end-effector velocity in the CS
ine
:
()
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎥
⎦
⎤
⎢
⎣
⎡
−
⎥
⎦
⎤
⎢
⎣
⎡
−=
−
−
−
am
m
s
ee
ee
sM
f
f
HJ
ω
v
HHJJθ
1
2
1
3
1
2
(15)
The satellite velocity is given by:
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎦
⎤
⎢
⎣
⎡
−
θH
f
f
H
ω
v
3
1
2
am
m
s
s
.
(16)
As in (Seweryn and Banaszkiewicz, 2008) and
(Rybus, Seweryn and Sąsiadek, 2016), we use
Langrangian formalism to derive dynamics
equations for the system. For the considered case of
a system free-floating in space, the potential energy
is neglected. We use the generalized coordinates
(Junkins and Schaub, 1997):
[]
T
ssp
θΘrq =
,
(17)
where Θ
s
is the orientation of the satellite. Following
Seweryn and Banaszkiewicz (2008) we describe the
orientation of the satellite by Euler angles, as their
use is more intuitive and straightforward than the
use of quaternions or orientation matrices. In the
range of motion considered herein, the risk of
obtaining singular configuration is very limited
(there is no tumbling motion of the manipulator-
equipped satellite). The Lagrange equation is:
Q
q
T
q
T
=
∂
∂
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
dt
d
,
(18)
where T is the kinetic energy of the system
expressed as:
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
θ
ω
v
NFD
FEB
DBA
θ
ω
v
T
s
s
TT
T
T
s
s
2
1
,
(19)
and Q is the vector of generalized forces:
[]
T
ss
uHFQ = ,
(20)
where u is the control vector composed of driving
torques in manipulator joints. In eqn. (19) the N
matrix is given by:
()
∑
=
+=
n
i
Ti
T
TiiRii
T
Ri
m
1
JJJIJN
,
(21)
Equation (18) is used to derive the generalized
equations of motion for the satellite-manipulator
system:
(
)
(
)
ppppp
qqqCqqMQ
,+=
,
(22)
where M denotes the mass matrix expressed as:
()
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
NFD
FEB
DBA
qM
TT
T
p
,
(23)
while C is the Coriolis Matrix with components
given by:
∑
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−=
n
k
jk
i
ij
k
ij
m
dq
d
m
dq
d
1
2
1
C
,
(24)
where
(
)
pij
m qM∈
and nkji …1,, = .
In eqn. (22) there are no potential forces, as the
considered system is the state of free fall. Equation
(22) can be used to determine the control vector u(
t).
3 TRAJECTORY
OPTIMIZATION
The approach to the end-effector trajectory
optimization that we use in our study was presented
by Seweryn and Banaszkiewicz (2008), with
improvements introduced by Rybus, Seweryn and
Sąsiadek (2016) to enhance the capabilities of the
algorithm. The optimization problem is how to drive
the end-effector from its initial state to the desired
final state while minimizing the optimization
criterion.
The general form of the optimized functional
G is:
() ()
(
)
=tttG
vp
,,uq
() ()
()
() () ()
()
[]
∫
+
f
t
t
vp
T
vpvp
dttttttttL
0
,,,, uqgλuq
,
(25)
where q
vp
= [q
v
q
p
]
T
,
dt
d
p
v
q
q =
,
λ
vp
= [λ
v
λ
p
]
T
, λ
p
and λ
v
denotes the Lagrange multipliers associated
with q
p
and q
v
, respectively, while the function g
describes the direct dynamics of the satellite-
manipulator system:
Application of Trajectory Optimization Method for a Space Manipulator with Four Degrees of Freedom
95

()
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
−
=
⎥
⎦
⎤
⎢
⎣
⎡
=
−
v
v
p
v
q
CqQM
q
q
g
1
.
(26)
In eqn. (25)
L is the cost functional to be minimized.
The selection of the appropriate cost functional is
not simple. This selection should be performed by a
control engineer for the specific mission, taking into
account the limitations and conditions defined for
this mission. In papers related to space robotics, a
criterion that assures minimization of changes of the
satellite orientation is most commonly used, e.g., by
Kaigom, Jung and Rossmann (2011), as any
substantial changes of the satellite attitude should be
avoided during the capture manoeuvre. However,
some authors also take into account the power use of
manipulator motors, e.g., Shah et al. (2013). In our
study we follow the approach of Seweryn and
Banaszkiewicz (2008) and we use quadratic norm of
the control input as a cost functional:
uu
T
L
2
1
=
.
(27)
Such a simple cost functional, related to the power
use of manipulator motors, is very common in
automation and robotic. The presented method could
easily be modified by using more complex cost
functional that would allow for achievement of
different goal. The Hamiltonian of the system is
given by:
gλ
T
vp
LH +=
.
(28)
The extremum of
G is found for:
0=
∂
∂
u
H
.
(29)
From eqn. (29), the control vector u can be
computed. We define a state vector as:
[]
T
pvpv
λλqqx =
,
(30)
and obtain a set of 2(12 + 2
n) differential equations
that minimize the functional
G and satisfy the
boundary conditions:
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
∂
∂
−
∂
∂
−
=
⎥
⎦
⎤
⎢
⎣
⎡
vp
T
vp
vp
vp
vp
L
q
g
λ
q
g
λ
q
.
(31)
A Boundary Value Problem (BVP) is formulated
and a set of eqn. (31) is solved with 2(12 + 2
n)
boundary conditions and 12 additional equations,
which must be satisfied by the BVP solver. The
initial state of the system (q
vp
at the initial time t
0
) is
determined by the first 12 + 2
n boundary conditions,
while the values of Lagrange multipliers at the final
time
t
f
are determined by another 12 + 2n equations.
These Lagrange multipliers are calculated from the
following equation:
()
f
tt
vp
T
fvp
t
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
=
q
ψ
vλ
,
(32)
Where the function ψ describes the final desired
state of the end-effector (ψ = [r
ee
Θ
ee
v
ee
ω
ee
]
T
).
Additional 12 parameters v are determined by the
algorithm to satisfy equations for ψ.
4 APPLICATION OF THE
OPTIMIZATION ALGORITHM
FOR A PLANAR
MANIPULATOR WITH 2
DEGREES OF FREEDOM
To demonstrate the trajectory optimization
algorithm, we performed an experiment on the
planar air-bearing microgravity simulator described
by Rybus et al. (2013). This simulator is a test-bed
that allows for experimental validation of trajectory
planning and control algorithms for free-floating
satellite-manipulator systems. In this test-bed, a
model of a satellite-manipulator system is mounted
on planar air-bearings that allow almost frictionless
motion on a 2x3
m
2
granite plate. Thus, microgravity
conditions are simulated in two dimensions.
Currently, a satellite model equipped with a
manipulator with 2 degrees of freedom is operated
on this testbed. Its parameters are summarized in
Tab. 1. A detailed description of the experiment
performed on the planar air-bearing microgravity
simulator was presented by Rybus and Seweryn
(2015). In the performed experiment at the initial
time
t
0
the velocities of manipulator joints and the
velocity of the satellite are zero, thus the initial
velocity of the end-effector is also zero. The desired
final end-effector position is set 0.3
m away from the
initial position. The final end-effector velocity must
be zero. The time of motion is set to 5
s.
For the planar system equipped with a
manipulator with 2 degrees of freedom the solution
that minimizes the cost functional
L is obtained from
20 first order differential equations (31) and 24
boundary conditions (10 equations constraining the
initial state, 10 equations for the final values of
Lagrange multipliers and 4 equations for ψ). The
driving torques for manipulator joints are computed
from the algebraic equation resulting from (29). The
trajectory planning is performed offline before the
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
96

experiment. We use a Matlab script with bvp4c
solver (a finite difference code that implements the
three-stage Lobatto IIIa formula). The optimal
trajectory is compared with a simple straight-line
trajectory. In this reference trajectory, the end-
effector velocity in the inertial reference frame is
constant during the major part of the motion (1.25
s
is allocated for end-effector acceleration at the
beginning and the same amount of time is allocated
for reducing the end-effector velocity to zero). This
straight-line trajectory is used as an initial guess of
the solution of the BVP problem. Both the straight-
line and the optimal trajectories defined in the
Cartesian space are transferred to the velocities of
manipulator joints. During the experiment, joint
controllers were used to assure trajectory realization
in the configuration space and there was no feedback
from the measurement of the end-effector position.
The reference end-effector trajectory in the
Cartesian space and the results of the experiment
(i.e. positions of the end-effector measured by the
visual pose estimation system) are presented in
Fig. 2 (on the XY plane), in Fig. 3 and Fig. 4. The
difference between the reference end-effector
position and the end-effector position measured by
the visual pose estimation system is shown in Fig. 5.
It can be seen that for both trajectories the end-
effector position obtained from the experiment is
very close to the planned reference trajectory (the
error is less than 0.015
m after 5s of motion). Fig. 6
shows four frames from a video recorded during the
realization of the optimal trajectory on the planar
air-bearing microgravity simulator. The change of
the satellite orientation, clearly visible in this figure,
is caused by reaction torques and reaction forces
induced by the motion of the manipulator. The free-
floating nature of the satellite-manipulator system
was taken into account during trajectory planning
with equations presented in Section 2. Thus, the end-
effector follows the desired trajectory despite the
changes in satellite orientation. Finally, in Fig. 7 and
Fig. 8, the reference positions of the manipulator
joints during the realization of both trajectories are
presented. Additionally, driving torques that should
be applied in the manipulator joints are also
presented in these two figures. The initial positions
of the manipulator joints for both the straight-line
and the optimal trajectories are the same (initial
conditions were exactly the same for both
experiments). In the presented case, the final
position of the manipulator joints are also almost
identical for the straight-line and the optimal
trajectories (the difference is less than 0.1 degrees
for both joints). The initial and final torques in the
optimal trajectory are non-zero, but there is no
boundary condition that would require zero control
torques. Three phases of the straight-line trajectory
(end-effector acceleration, motion with constant
velocity and breaking) are reflected in control
torques. The optimization algorithm (with the
selected quadratic norm of the control input as a cost
functional) resulted in smoother behaviour of the
control input. Here it should be noted that in the test
set-up the DC motors move the manipulator joints
though harmonic drives, while in our computations
the gear reduction ratio is not taken into account.
The optimization procedure allowed for 60.2%
reduction of the cost functional connected with the
power use of the manipulator motors.
To more thoroughly assess what the advantage of
using the optimization method over utilization of a
simple straight-line trajectory is, we analysed 30
trajectories based on randomly selected initial and
final end-effector positions. The area in which the
end-effector positions were selected was limited to a
rectangle defined by apexes: P
A
= [0.4m 0.2m]
T
and
P
B
= [1.0m 0.8m]
T
(expressed in the inertial
reference frame located at the initial position of the
manipulator-equipped satellite centre of mass). The
time of motion was set to 4
s. All other parameters
were the same as in the presented experimental
example. For each pair of points, a straight-line
trajectory was constructed and then used as an initial
guess solution for the BVP problem. The cost
functional
L (quadratic norm of the control input)
was calculated for each straight-line and optimal
trajectory. The performed study found that for these
randomly selected 30 pairs of points, the average
reduction of the cost functional resulting from the
trajectory optimization was 49.4%, while the lowest
obtained reduction of
L was 19.67%.
Table 1: Properties of the planar satellite-manipulator.
Parameter Value
1 Satellite mass
12.9 kg
2 Satellite moment of inertia
0.208 kg·m
2
3 Position of manip. mounting (r
q
)
[0.327 0] m
4 Manipulator link 1 mass
4.5 kg
5 Manipulator link 1 moment of inertia
0.32 g·m
2
6 Manipulator link 1 length
0.62 m
7 Manipulator link 2 mass
1.5 kg
8 Manipulator link 2 moment of inertia
0.049 kg·m
2
9 Manipulator link 2 length
0.6 m
Application of Trajectory Optimization Method for a Space Manipulator with Four Degrees of Freedom
97

Figure 2: End-effector position on XY plane (straight-line
vs optimal).
Figure 3: X-component of the end-effector position
(straight-line vs optimal).
Figure 4: Y-component of the end-effector position
(straight-line vs optimal).
Figure 5: Difference between the reference end-effector
position and position measured during experiment.
Figure 6: Planar satellite-manipulator system during
realization of the optimal trajectory on the air-bearing
microgravity simulator.
Figure 7: Reference position of manipulator joint 1 and
driving torque applied in this joint (straight-line vs
optimal).
Figure 8: Reference position of manipulator joint 2 and
driving torque applied in this joint (straight-line vs
optimal).
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
98
5 APPLICATION OF THE
OPTIMIZATION ALGORITHM
FOR A MANIPULATOR WITH
4 DEGREES OF FREEDOM
In this section we present the results of trajectory
optimization performed for the WMS1 LEMUR
(Seweryn et al., 2014). A picture of this manipulator
is presented in Fig. 9, while Tab. 2 summarizes its
basic properties. It is a manipulator with 7 degrees
of freedom. However, we perform trajectory
optimization only for the first four joints. The
driving torques required for the positioning of the
end-effector are higher than the driving torques
required for obtaining the desired orientation of the
end-effector. For the manipulator with 7 degrees of
freedom we present results of numerical simulations
only. For the system with a manipulator with 4
degrees of freedom the solution that minimizes
L is
obtained from 40 first order differential equations
and 46 boundary conditions (20 equations
constraining state at
t
0
, 20 equations for λ
vp
at t
f
and
6 equations for ψ).
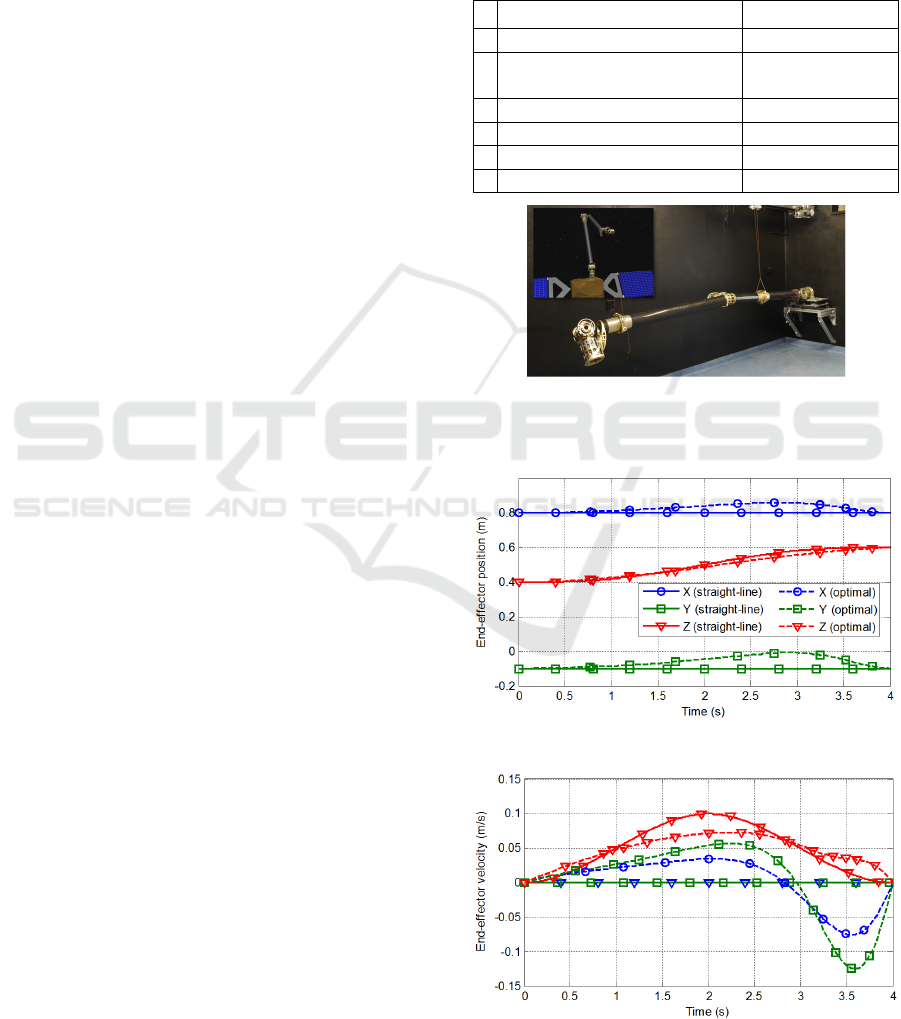
The initial position of the end-effector (expressed
in
CS
ine
located at the initial position of the servicing
satellite centre of mass) is r
ee
(t
= t
0
) = [0.8m -0.1m
0.4m ]
T
, while the desired final end-effector position
is r
ee
(t
= t
f
) = [0.8m -0.1m 0.6m]
T
. The initial and
final velocity of the end-effector is zero. There is no
initial velocity of the servicing satellite. The desired
time of motion is 4
s. As in the case of the planar
system, we use a straight-line trajectory as the initial
guess for the BVP solution and for comparison with
the optimal trajectory. The straight-line trajectory is
divided into a 2
s phase of end-effector acceleration
(in CS
ine
) and a 2s phase of breaking. The position
and velocity of the end-effector for both trajectories
are presented in Fig. 10 and Fig. 11. The positions of
first four manipulator joints are presented in Fig. 12,
while torques applied on these joints are shown in
Fig. 13. In this example the driving torques required
for the realization of both trajectories are far lower
than the maximal available driving torques (15
Nm).
The optimization algorithm allowed 68%
reduction of the cost functional
L (from L
str
= 11.4
to
L
opt
= 3.56). Although the final end-effector
position differs from the initial end-effector position
only by Z-component, in Fig. 8 it can be seen that all
components of the end-effector position changed
during the realization of the optimal trajectory (X-
and Y-components return to their initial values at the
end). The boundary condition sets the final end-
effector velocity to zero - this is the main advantage
of the modified algorithm in comparison to its
previous version presented by Seweryn and
Banaszkiewicz (2008). No condition is set on the
final velocities of the manipulator joints. Thus, in
the considered case the final velocities of the
manipulator joints are not equal to zero.
Table 2: Properties of the spatial satellite-manipulator.
Parameter Value
1
Satellite mass (assumed) 100 kg
2
Satellite moment of inertia
diag([2.8 6.1 7.4])
kg·m
2
3
Number of manip. joints 7
4
Total length of manipulator 3.1 m
5
Total mass of manipulator 15.25 kg
6
Maximal joint driving torque 15 Nm
Figure 9: Prototype of the WMS1 LEMUR robotic arm
and visualization of this manipulator on a servicing
satellite.
Figure 10: End-effector position (straight-line vs optimal).
Figure 11: End-effector velocity (straight-line vs optimal).
Application of Trajectory Optimization Method for a Space Manipulator with Four Degrees of Freedom
99
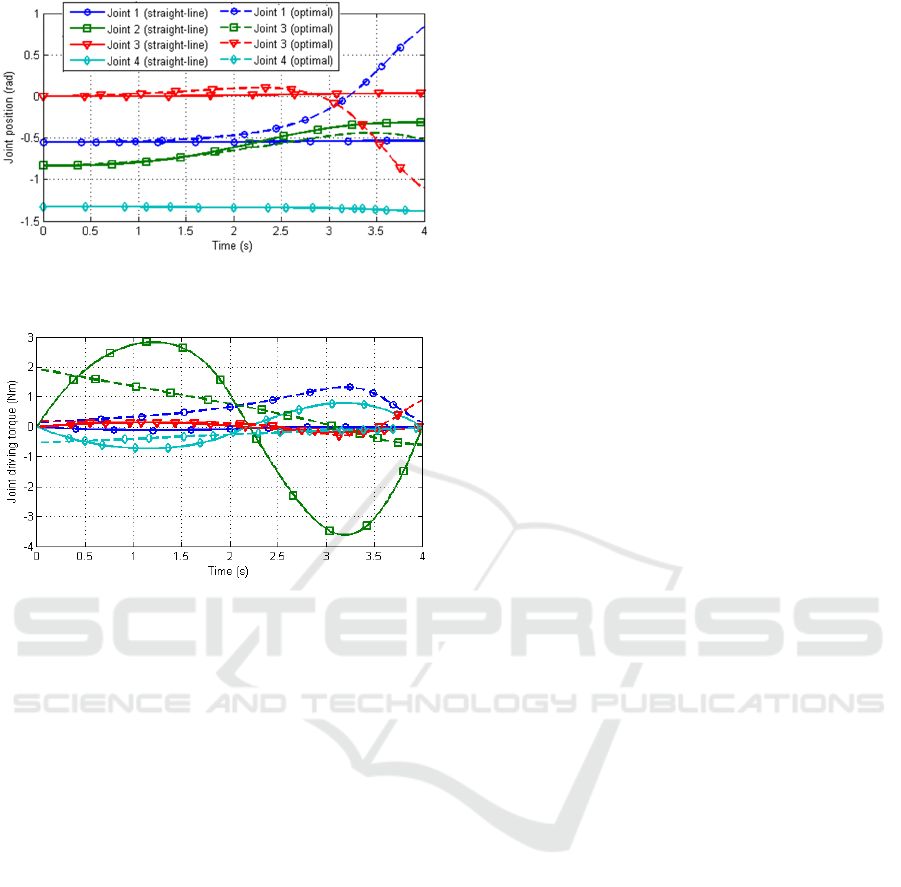
Figure 12: Positions of manipulator joints (straight-line vs
optimal).
Figure 13: Driving torques at manipulator joints (straight-
line vs optimal).
6 DISCUSSION
The use of the trajectory optimization algorithm for
free-floating satellite-manipulator systems was
demonstrated for two cases: (i) a planar system with
a manipulator with 2 degrees of freedom and (ii) a
spatial system with a manipulator with 4 degrees of
freedom (with four joints responsible for obtaining
desired end-effector position). In the first case the
experiments were performed on the planar air-
bearing microgravity simulator. In the second case,
only numerical simulations were performed, but the
mass and geometrical properties of a real prototype
of a space manipulator were used.
As in the approach presented by Seweryn and
Banaszkiewicz (2008) quadratic norm of the control
input has been used as a cost functional that was
minimized. Such approach is simple and common in
automation and robotic. The presented method could
be modified by using a more complex cost
functional that would, e.g., minimize changes in the
satellite orientation. In each case the optimal
trajectory was compared with a straight-line
trajectory and it was proven that the optimization
algorithm allows for substantial reduction of the
power use of the manipulator motors. Moreover, for
the planar case the analysis was performed with 30
trajectories based on randomly selected initial and
final end-effector position and it was found that the
average reduction of the selected cost functional
resulting from the trajectory optimization was
49.4%. In all presented cases the required driving
torques for the manipulator joints were far lower that
the maximal available control torques. However, it is
expected that in the rigidization and detumbling
phases after the orbital capture manoeuvre the
required driving torques will be higher, as the large
mass of the target object will be attached to the end-
effector. In such a case, the presented optimization
method may prove to be very useful.
There are two main weaknesses of the presented
optimization algorithm: (i) it is not guaranteed that
the global minima will be found, and (ii) the
computational cost of the trajectory optimization is
very high. The second issue could be especially
problematic in case of algorithm implementation on
flight hardware. However, the trajectory planning
stage can be performed while the manipulator-
equipped satellite is waiting in a safe point (it might
even be possible to perform such computations on
Earth).
Current work focuses on selecting more practical
cost functional (e.g., to achieve minimization of the
manipulator influence on the satellite) and
performing trajectory optimization after the grasping
of the target object. Precise evaluation of algorithm
computational cost is also currently performed.
7 CONCLUSIONS
Manipulator trajectory planning is important for
planned active debris removal and on-orbit servicing
missions. The successful demonstration of the
trajectory optimization algorithm on the
experimental test set-up (the planar air-bearing
microgravity simulator) was an important step in the
development of this algorithm. The simulations
performed for the spatial manipulator with 4 degrees
of freedom with mass and geometrical properties of
the prototype robotic arm (WMS1 LEMUR) were
also useful for the algorithm validation. Thus, the
results presented in this paper serve not only as an
illustration and example of the optimization
algorithm application, but allow as an assessment of
the possibility of using trajectory optimization
during one of the planned active debris removal and
on-orbit servicing missions.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
100

ACKNOWLEDGEMENTS
This paper was partially supported by The National
Centre for Research and Development project no.
PBS3/A3/22/2015.
REFERENCES
Aghili, F. (2008) ‘Optimal control for robotic capturing
and passivation of a tumbling satellite with unknown
dynamics’, AIAA Guidance, Navigation, and Control
Conference and Exhibit (AIAA-GNC’2008). Honolulu,
Hawaii, USA, 18-21 August.
Dubowsky, S., Papadopoulos, E. (1993) ‘The kinematics,
dynamics, and control of free-flying and free-floating
space robotic systems’, IEEE Transactions on
Robotics and Automation, 9(5), pp. 531-543.
Flores-Abad, A., et al., (2014a) ‘Optimal Control of Space
Robots for Capturing a Tumbling Object with
Uncertainties’, Journal of Guidance, Control, and
Dynamics, 37(6), pp. 2014-2017.
Flores-Abad, A., et al. (2014b) ‘A review of space
robotics technologies for on-orbit servicing’, Prog.
Aerosp. Sci., 68, pp. 1-26.
Hausmann, G., et al. (2015) ‘E.Deorbit Mission: OHB
Debris Removal Concepts’, 13th Symposium on
Advanced Space Technologies in Robotics and
Automation (ASTRA’2015). Noordwijk, The
Netherlands, 11-13 May.
Junkins, J.L., Schaub, H. (1997) ‘An Instantaneous
Eigenstructure Quasivelocity Formulation for
Nonlinear Multibody’, Dynamics. J. Astronaut. Sci.,
45(3), pp. 279-295.
Kaigom, E. G., Jung, T. J., Rossmann, J. (2011) ‘Optimal
Motion Planning of a Space Robot with Base
Disturbance Minimization’, 11th Symposium on
Advanced Space Technologies in Robotics and
Automation (ASTRA’2011). Noordwijk, The
Netherlands, 12-14 April.
Lindberg, R. E., Longman, R. W., Zedd, M. F. (1993)
‘Kinematic and dynamic properties of an elbow
manipulator mounted on a satellite’, in Xu, Y.,
Kanade, T. (eds.) Space Robotics: Dynamics and
Control. New York: Springer.
Liou, J.-C., Johnson, N.L., Hill, N.M. (2010) ‘Controlling
the growth of future LEO debris populations with
active debris removal’, Acta Astronautica, 66 (5-6),
pp. 648 - 653.
Rybus ,T., Seweryn, K. (2015) ‘Manipulator trajectories
during orbital servicing mission: numerical
simulations and experiments on microgravity
simulator’, 6th European Conference for Aeronautics
and Space Sciences (EUCASS‘2015). Kraków, Poland,
29 June -2 July.
Rybus, T., Seweryn, K., Sąsiadek, J. Z. (2016) ‘Trajectory
Optimization of Space Manipulator with Non-zero
Angular Momentum During Orbital Capture
Maneuver’, AIAA Guidance, Navigation, and Control
Conference (AIAA-GNC’2016). San Diego, California,
USA, 4-8 January.
Rybus, T., et al. (2013) ‘New Planar Air-bearing
Microgravity Simulator for Verification of Space
Robotics Numerical Simulations and Control
Algorithms’, 12th Symposium on Advanced Space
Technologies in Robotics and Automation
(ASTRA’2013). Noordwijk, The Netherlands, 15-17
May.
Seweryn, K., Banaszkiewicz, M. (2008) ‘Optimization of
the Trajectory of a General Free-Flying Manipulator
During the Rendezvous Maneuver’, AIAA Guidance,
Navigation, and Control Conference and Exhibit
(AIAA-GNC’2008). Honolulu, Hawaii, USA, 18-21
August.
Seweryn, K., et al. (2014) ‘The laboratory model of the
manipulator arm (WMS1 LEMUR) dedicated for on-
orbit operation’, 12th International Symposium on
Artificial Intelligence, Robotics and Automation in
Space (i-SAIRAS’2014). Saint-Hubert, Quebec,
Canada, 17-19 June.
Shah, S. V., et al. (2013) ‘Energy optimum reactionless
path planning for capture of tumbling orbiting objects
using a dual-arm robot’, 1st International and 16th
National Conference on Machines and Mechanisms
(iNaCoMM’2013). IIT Roorkee, India, 18-20
December.
Sullivan, B., Akin, D. (2012) ‘Satellite servicing
opportunities in geosynchronous orbit’, AIAA SPACE
2012 Conference and Exposition. Pasadena,
California, USA, 11-13 September.
Umetani, Y., Yoshida, K. (1989) ‘Resolved motion rate
control of space manipulators with generalized
jacobian matrix’, IEEE Transactions on Robotics and
Automation, 5 (3), pp. 303-314.
Application of Trajectory Optimization Method for a Space Manipulator with Four Degrees of Freedom
101
