
Integrated Object Segmentation and Tracking for 3D LIDAR Data
Mehmet Ali C¸ a
˘
grı Tuncer and Dirk Schulz
Cognitive Mobile Systems, Fraunhofer FKIE, Fraunhoferstr. 20, 53343 Wachtberg, Germany
Keywords:
Motion Segmentation, Object Tracking, Distance Dependent Chinese Restaurant Process, 3D LIDAR Data.
Abstract:
This paper proposes a novel method for integrated tracking and segmentation of 3D Light Detection and
Ranging (LIDAR) data. The conventional processing pipeline of object tracking methods performs the seg-
mentation and tracking modules consecutively. They apply a connected component algorithm on a grid for
object segmentation. This results in an under-segmentation and in turn wrong tracking estimates when there
are spatially close objects. We present a new approach in which segmentation and tracking modules profit
from each other to resolve ambiguities in complex dynamic scenes. A non-parametric Bayesian method, the
sequential distance dependent Chinese Restaurant Process (s-ddCRP), enables us to combine segmentation
and tracking components. After a pre-processing step which maps measurements to a grid representation, the
proposed method tracks each grid cell and segments the environment in an integrated way. A smoothing algo-
rithm is applied to the estimated grid cell velocities for better motion consistency of neighboring dynamic grid
cells. Experiments on data obtained with a Velodyne HDL64 scanner in real traffic scenarios illustrate that
the proposed approach has a encouraging detection performance and conclusive motion consistency between
consecutive time frames.
1 INTRODUCTION
A very important task of intelligent mobile vehicles is
that being capable of a reliable perception of their en-
vironment. They decide the movements and other ac-
tions by considering the evaluated state of their envi-
ronment so close objects in complex dynamic scenes
need to be tracked in the high volume 3D point cloud
data. For a reliable evaluation of dynamic environ-
ments, data provided by sensors need to be processed.
3D Light Detection and Ranging (LIDAR) sen-
sors are being used to obtain the necessary observa-
tions. These 3D sensors provide a huge amount of
point cloud data to allow more thorough representa-
tion of the environment and less noisy distance mea-
surements in comparison to other types of sensors
such as stereo cameras which exhibit measurement er-
ror growing quadratic with the distance and depend on
external lighting.
A multi-object tracking problem with 3D laser
data can be decomposed as a processing pipeline of
point cloud segmentation and object tracking. Typical
approaches perform these steps consecutively with an
assumption that objects are well segmented from each
other. However, this assumption does not hold under
the circumstances of complex dynamic scenes. For
instance, pedestrians often get very close to static ob-
stacles such as parking cars or buildings. That causes
to accidental segmentation errors which lead to inac-
curate or wrong tracking estimates.
This paper presents a framework to replace the
consecutive processing pipeline and solve the track-
ing and segmentation steps simultaneously. Different
parts of the pipeline structure profit from each other
to resolve ambiguities in complex dynamic scenes.
Using a non-parametric Bayesian method, the se-
quential distance dependent Chinese Restaurant Pro-
cess (s-ddCRP), enables us to integrate segmentation
and tracking components in a single coherent frame-
work. The proposed method tracks each grid cell and
segments the environment in an integrated way. A
smoothing algorithm is applied to the estimated grid
cell velocities for better motion consistency of neigh-
boring dynamic grid cells. We present experimental
results achieved using data collected with a Velodyne
scanner in real traffic to show the feasibility and ben-
efit of the proposed approach.
The layout of this paper is as follows. It starts
with a discussion of related work in Section 2. In
Section 3, the proposed method is described in detail.
Section 4 evaluates the performance of the presented
framework on real traffic data. Section 5 recapitulates
the most important findings and gives an outlook on
future work.
344
Tuncer, M. and Schulz, D.
Integrated Object Segmentation and Tracking for 3D LIDAR Data.
DOI: 10.5220/0005982103440351
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 344-351
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Architecture of the proposed framework for integrated segmentation and tracking of 3D LIDAR data.
2 RELATED WORK
Estimating the states of moving objects has been stud-
ied for a long time. 3D LIDAR data is projected on a
2D representation (Urmson et al., 2008; Montemerlo
et al., 2008). Given a known segmentation, tracking
becomes a problem of motion estimation and data as-
sociation (Douillard et al., 2011; Moosmann et al.,
2009).
Typical approaches perform the segmentation and
tracking components consecutively (Petrovskaya and
Thrun, 2009; Morton et al., 2011; Choi et al., 2013;
Azim and Aycard, 2012). However this does not hold
in case of complex dynamic surroundings. Under
these circumstances, segmentation gets difficult and
results in an under-segmentation of objects and inac-
curate tracking estimates. In the 3D LIDAR based
tracking approach by Li et al. (Li et al., 2014), the seg-
mentation step is completely eliminated by estimating
a motion field of the 3D LIDAR data. This avoids
tracking errors caused by the segmentation compo-
nent, but the detection of nearby objects in the data re-
mains problematic. As a solution, distance dependent
Chinese Restaurant Process (ddCRP) (Blei and Fra-
zier, 2011) is applied to 3D LIDAR data of the traf-
fic scenes by Tuncer and Schulz (Tuncer and Schulz,
2015). The ddCRP is an extension of the Chinese
Restaurant Process (CRP) (Pitman et al., 2002), an hi-
erarchical non-parametric Bayesian clustering model.
The method of Tuncer and Schulz estimates the mo-
tion field of the scene and exploits spatial and motion
features together for 3D point cloud segmentation. In
this work, we utilize segmentation and tracking mod-
ules in an integrated way to detect and isolate objects
in the data by using a sequential variant of the distance
dependent Chinese Restaurant Process (ddCRP).
3 PROPOSED METHOD
This section explains our novel approach that solves
the tracking and segmentation tasks simultaneously.
Avoiding under-segmentations of objects in 3D LI-
DAR data incorporating state information from track-
ing promotes consistent and better tracking results.
The architecture of the proposed method is shown in
Figure (1). Each block is described in the following
sections.
3.1 Pre-processing
Recent 3D LIDAR sensors provide huge amounts of
data which poses a challenge on the processing algo-
rithms. For an efficient approach, measurements are
mapped to a grid gr
t
which has 0.2 m grid cell reso-
lution in x and y dimensions. It stores the height of
objects in each cell as well.
The center of mass of points p = (g
x
, g
y
) of a grid
cell is determined. In addition, the average height of
points H and variance of height of points 4H falling
into the grid cell are calculated. Then, a grid cell i at
time frame t is represented as gr
t,i
=
g
x
, g
y
, H,4H
.
To classify the grid cells as either a ground or an ob-
stacle cell, we use the decision rule,
gr
t
= {gr ∈
˜
gr
t
| H(gr) ≥ tr
H
∧ 4H(gr) ≥ tr
4H
}
(1)
where tr
H
and tr
4H
are empirically learned thresh-
olds. They are chosen as 30 cm height above ground
level and 3 cm variance in height measurements re-
spectively. Then, a connected components algo-
rithm (Bar-Shalom, 1987) using 8 neighborhood on
the grid is applied to extract segmentation blobs of
the scene.
Integrated Object Segmentation and Tracking for 3D LIDAR Data
345

3.2 Kalman Filtering
It is assumed that dynamic objects move homoge-
neously, which means that motion states of cells be-
longing to the same object are similar. Therefore grid
cells are treated as the basic elements of motion and
each cell is assigned its own motion vector. Instead
of tracking the centroid of a moving object, we ap-
ply independent linear Kalman filters to each grid cell
belonging to the extracted segmentation blobs in the
pre-processing step. A typical Kalman filter with con-
stant velocity model is used for estimation and pre-
diction of each cell’s location at the succeeding time
frames.
If a grid cell gr
t,i
is associated with a cell gr
t−1, j
from the previous scan, its Kalman filter is replaced
with the last Kalman filter of grid cell gr
t−1, j
. Then
it is updated with the coordinates of gr
t,i
. The Fil-
tering approach yields the motion state vector x
T
t
=
ˆgr
x
, ˆgr
y
, v
x
, v
y
, which consists of the estimated cen-
ter of mass of the grid cells and their velocities .
3.3 Grid Cell Association
Grid cells of previous and current scans are assigned
with a Gating and Nearest Neighbor (NN) filter. The
gating strategy prunes candidates. Cell locations pre-
dicted from the state vectors of the previous time
frames provide a validation gate. If there are candi-
dates lying in the gate, the nearest one is accepted
based on the Euclidean distances of the centers of
mass of points p. Otherwise the current grid cell is
not associated with any previous measurements and a
new Kalman filter is initialized.
3.4 Smoothing Process
Applying a simple Gating and Nearest Neighbor fil-
ter for grid cell association might result in association
errors. Considering the assumption of homogeneous
movement of grid cells belonging to the same object,
a smoothing process (Alparone et al., 1996) is ap-
plied to the estimated grid cell velocities of extracted
segmentation blobs for better motion consistency of
neighboring dynamic grid cells. If the motion vector
of a grid cell gr
t,i
is denoted as v
i
, then we can show
the motion feature of its N neighboring cells gr
t,n
with
v
n
. The mean square deviation MS
gr
t,i
of grid cell gr
t,i
can be computed as below,
MS
gr
t,i
=
N
∑
n=1
1
N
k
v
i
− v
n
k
2
(2)
For the smoothing process, we also need to cal-
culate the mean square MS
gr
t,n
of each N neighboring
cells as follows,
MS
gr
t,n
=
N
∑
j=1
1
N
v
n
− v
j
2
(3)
If the condition in Equation (4) holds, the algo-
rithm detects that the motion vector of the grid cell in
query is abnormal.
max(MS
gr
t,n
) < MS
gr
t,i
(4)
In this case, the motion vector v
i
of the grid cell gr
t,i
is
replaced by the motion vector of the cell with the min-
imum value of MS
gr
t,n
, which is calculated in Equa-
tion (3).
3.5 Object Segmentation
This subsection explains the partitioning process of
the 3D LIDAR data into objects. In the pre-processing
step, point cloud data is coarsely segmented into blobs
using a connected components algorithm based on
an 8 neighborhood of the 2D grid cells. However,
when objects get close to each other, this approach
might lead to under-segmentation. That means that
two or more objects are part of a single blob, which
induces inaccurate tracking estimates. Under these
circumstances, it is not sufficient to rely on the spa-
tial distance of grid cells alone for the segmenta-
tion. This paper therefore aims to show that integrat-
ing segmentation and tracking components increases
the performance of the general tracking system. We
present a sequential variant of distance dependent
Chinese Restaurant Process (ddCRP) method, which
finds contiguous grid cell regions and determines the
unknown number of clusters (objects) in the extracted
blobs. Assigned grid cells are then sequentially used
in the following time frames.
3.5.1 Chinese Restaurant Process
The sequential-ddCRP (s-ddCRP) algorithm is an ex-
tension of the Chinese Restaurant Process (CRP). The
generative process of CRP is assumed with an infi-
nite number of tables in a restaurant. Costumers enter
the restaurant one by one. Either a customer takes a
seat at a table z (c
i
) with a probability proportional to
the number of people already sitting at that table or
takes a new table with a probability proportional to
a scaling parameter α. The seating plan provides the
clustering of data. CRP is an exchangeable model,
i.e. the order of the data does not affect the posterior
distribution over partitions. However, exchangeabil-
ity does not hold for point cloud data because the co-
ordinates of grid cells need to be considered for spa-
tially contiguous segmentations. For the task of 3D
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
346

LIDAR data segmentation, each extracted blob repre-
sents a restaurant; tables denote the clusters (objects)
and customers are grid cells. We aim to estimate the
number of clusters in each extracted blob.
3.5.2 Sequential Distance Dependent Chinese
Restaurant Process
The sequential ddCRP method is able to cluster non-
exchangeable point cloud data into objects. It defines
a distribution over partitions indirectly via distribu-
tions over links between grid cells. This leads to a
biased clustering: nearby grid cells are more likely to
be clustered as an object. A grid cell gr
i
has a link
variable c
i
which links to another cell gr
j
or to itself
according to the distribution below,
p(c
i
= j|A, α) ∝
(
A
i j
if i 6= j,
α if i = j.
(5)
where the affinity A
i j
= f (d
i j
) depends on a dis-
tance d
i j
between cells and a window decay function
f (d) = 1 [d < a] with a value of a = 1, which con-
nects adjacent grid cells. Grid cells link together with
a probability proportional to A
i j
or cell gr
i
can stay
alone and link itself with a probability proportional to
α. Then the generative process is as follows:
1. For each grid cell gr
i
, sample its link assignment
c
i
v s −ddCRP(A, α)
2. Assign the customer links c
i
to the cluster assign-
ments (object assignments) z
i
. Then draw param-
eters θ
k
v G
0
for each cluster.
3. For each grid cell, sample data x
i
v F(θ
k
) inde-
pendently. The k represents a cluster.
Here, the F(θ
k
) is a Gaussian distribution with θ
k
=
µ
k
, σ
2
. The base distribution G
0
defines the mixture
model of extracted segmentation blobs. It is selected
as a conjugate prior of the data generating distribu-
tion with Θ =
µ
0
, σ
2
0
. While nearby grid cells are
linked probabilistically to Equation (5), the estimated
motion features are sampled according to the cell as-
signments as described above.
3.5.3 Posterior Inference
The key problem of inference is to compute the poste-
rior distribution of the latent variables conditioned on
the estimated motion features. However, the posterior
is intractable to directly evaluate because of the huge
combinatorial number of cluster structures. Therefore
we resort to a Gibbs sampling, which iteratively sam-
ples each latent variable c
i
conditioned on other latent
variables c
−i
and the state vector x as below,
p(c
i
|c
−i
, x, Ω) ∝ p (c
i
|A, α) p (x|z(c) , Θ) (6)
where Ω =
{
A, α, Θ
}
. The first term of Equation (6) is
the s-ddCRP prior given in Equation (5). The second
one is the likelihood, which is factorized according to
the cluster index as follow,
p(x|z (c), Θ) =
K
∏
k=1
p
x
z(c)=k
|Θ
. (7)
K denotes the number of clusters and x
z(c)=k
rep-
resents the motion vectors of grid cells assigned to
cluster k. This factorization allows us to apply a
block-wise sampling because we do not need to re-
evaluate terms which are unaffected as the sampler
reassigns c
i
. Equation (8) shows the computation of
the marginal probability.
p
x
z(c)=k
|Θ
=
Z
∏
i∈z(c)=k
p(x
i
|θ)
!
p(θ|Θ)dΘ
(8)
Selecting conjugate p(x
i
|θ) and G
0
enables the
marginalization of θ. Then Equation (8) can be com-
puted analytically (Gelman et al., 2003).
The sampling algorithm explores the space of pos-
sible clusterings by reassigning links c
i
. If c
i
is the
only link connecting two clusters, they split. When
there are other alternative links connecting those clus-
ters, the partitions of data stay unchanged. Reassign-
ing the link c
i
might newly connect two clusters as
well. The sampler considers how the likelihood is af-
fected by removing and randomly reassigning the cell
links. It needs to consider the current link c
i
and all its
connected cells, because if a cell gr
i
connects to a dif-
ferent cluster, then all cells which are linked to it also
move to that cluster. The sampler explores the space
of possible segmentations with these reassignments.
The sampling approach considers different cluster
layouts. Assuming cluster indices m and l joined to
cluster r, a Markov chain can be specified as follows,
p(c
i
|c
−i
, x, Ω) ∝
(
p(c
i
|A, α)Λ (x, z, Θ) if m ∪l,
p(c
i
|A, α) otherwise,
(9)
where
Λ (x, z, Θ) =
p
x
z(c)=r
|Θ
p
x
z(c)=m
|Θ
p
x
z(c)=l
|Θ
.
(10)
The sampler generates different segmentation hy-
potheses and decides on the most probable ones by
using motion and spatial features together. The sam-
pling procedure is initialized with a priori clusterings
obtained in the previous time step. The mean value of
smoothed motion vectors of grid cells which form an
object is assigned as a motion feature of the object.
Integrated Object Segmentation and Tracking for 3D LIDAR Data
347
(a) (b)
(c) (d)
(e) (f)
(g) (h)
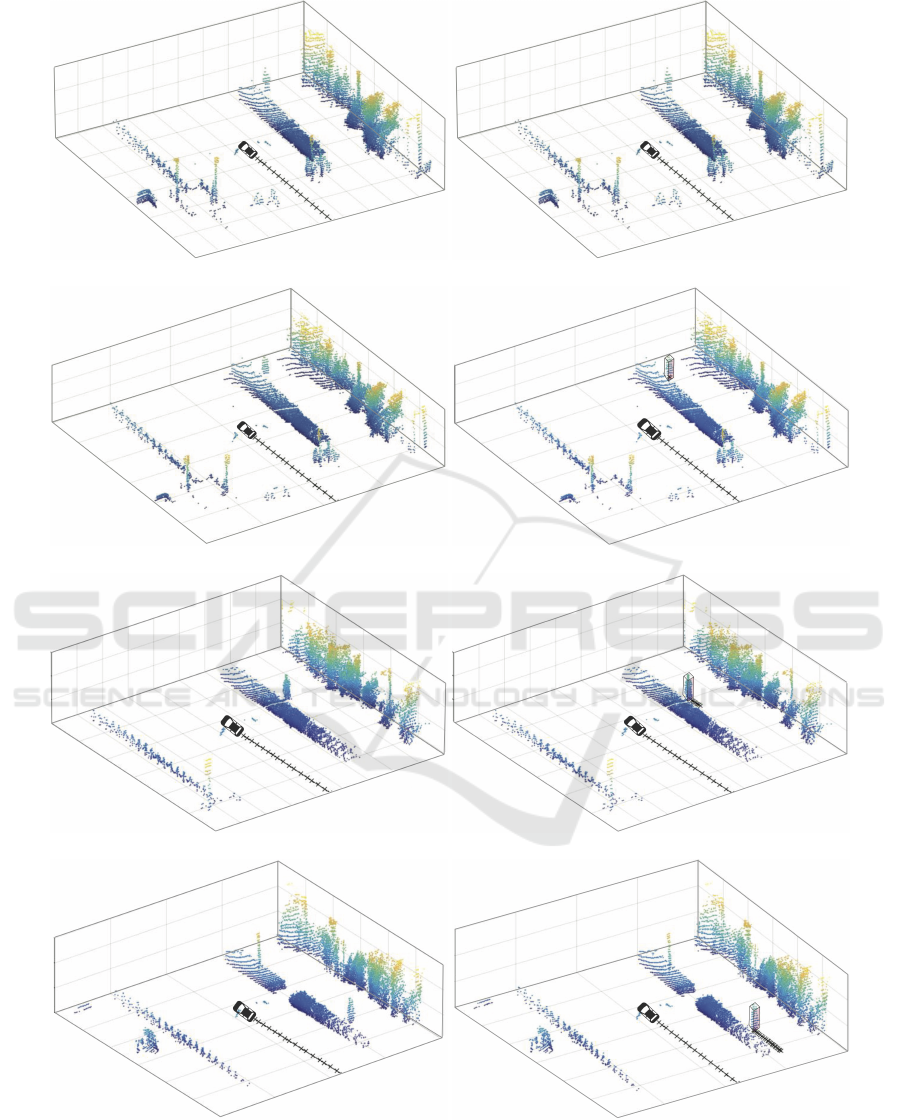
Figure 2: From left to right, the columns display the scene segmented by the connected components algorithm and the
proposed method. From top to bottom, each raw represents the scene at different time frames t = 119, t = 121, t = 129 and
t = 144. For better visualization, the 3D bounding box is applied only for the detected pedestrian. Black solid lines show the
trajectories of the EGO vehicle and the pedestrian.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
348

3.6 Track Management
Two main objectives of track management are: initial-
ization of a new track when the s-ddCRP algorithm
detects a new object and removing spurious tracks.
As the s-ddCRP algorithm exploits spatial and motion
features together, it delivers the information of seg-
mented objects and the features of their corresponding
grid cells. The data association unit sends information
only when there is no grid cell for an association to a
track. Whenever the grid cells of an object are not
associated to an existing object’s cells, the track man-
agement module creates a new track and waits for the
next time frame. If it also gets associated in the fol-
lowing frame, it is a new object. Otherwise a false de-
tection occurs. When the data association unit doesn’t
find any grid cell for association of an existing track,
it is deleted.
4 EXPERIMENTAL RESULTS
The proposed method was evaluated on a real world
data set (Geiger et al., 2013). That was recorded us-
ing a Velodyne HDL-64D LIDAR sensor and a high
precision GPS/IMU inertial navigation system. The
LIDAR sensor has a frame rate of 10 Hz, a 360 de-
gree horizontal field of view and it produces approx-
imately 1.1 million point measurements per second.
Estimated grid cell velocities are transformed to one-
dimensional movement directions for the inference
step of s-ddCRP. Larger α values bias the algorithm
towards more clusters so we set α = 10
−4
. The s-
ddCRP sampler is run with 20 iterations for each ex-
tracted segmentation blob.
Table 1: Performance of the smoothing algorithm. A
smaller SD value means better motion consistency of neigh-
boring grid cells.
SD
Without Smoothing 46.2
Smoothing 35.8
In order to evaluate the benefit of the smoothing
algorithm, the standard deviation SD
i
of velocities of
moving grid cells constituting an object is computed.
The average of the computed value SD is considered
as the effect of smoothing. Table (1) shows that the
smoothing algorithm results in a better motion con-
sistency of clustered grid cells.
The ground truth for evaluating the tracker work-
ing on the LIDAR data set which is used for experi-
ments is not available, so we have performed a qual-
itative evaluation. Performance of the proposed ap-
proach has been tested with different data sequences.
A representative one is shown in Figure (2). For com-
parison, we also applied a conventional segmentation
method of 3D LIDAR data which includes a con-
nected components algorithm on a grid (Bar-Shalom,
1987). A pedestrian walking close to a wall gets into
the perception field of the laser scanner equipped on a
moving car at time frame t = 119 in Figure (2). Both
the pedestrian and the car are heading in the same
direction. Although the typical object segmentation
method is not able to segment the pedestrian, the pro-
posed approach can detect and start tracking after two
frames in Figure (2) (d). Beside the spatial features,
the segmentation unit also exploits the motion vec-
tors sent by the filtering module. The left column
of Figure (2) illustrates that the pedestrian can not
be detected by the connected component algorithm.
However, the proposed method successfully contin-
ues tracking the pedestrian during the data sequence
as shown in the right column of Figure (2).
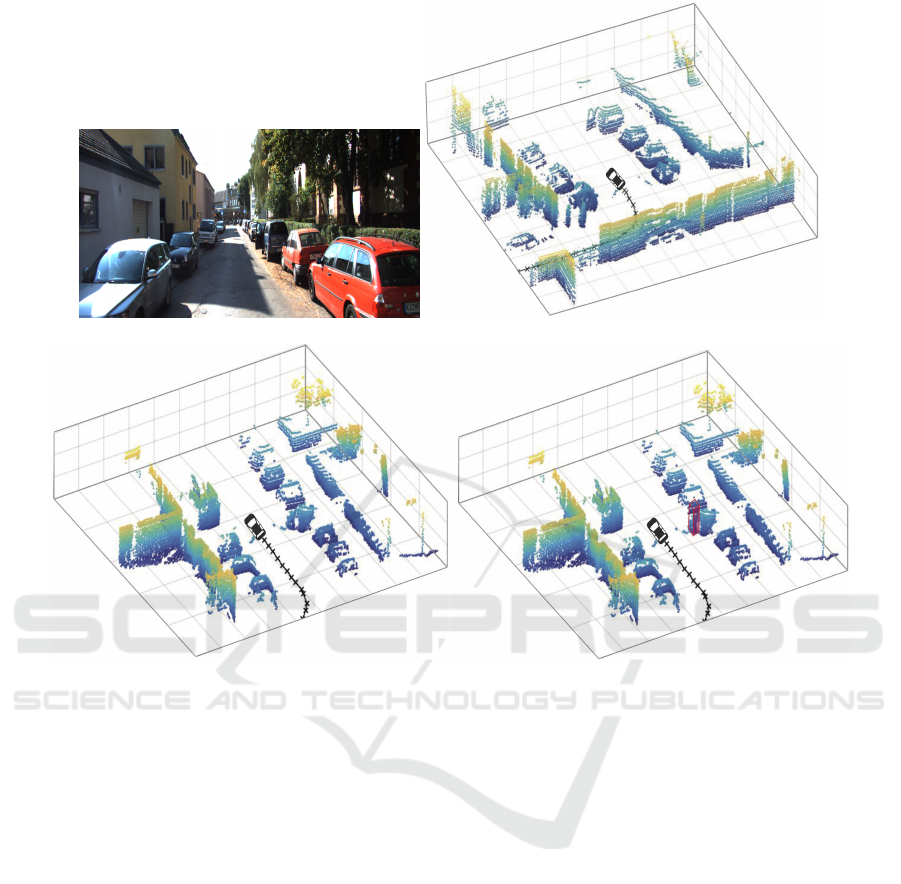
Figure (3) displays a scene sequence where the
door of a car is opened and a person suddenly gets
out of the car. In Figure (3) (a) and Figure (3) (b), the
scene at time frame 288 is displayed by a RGB image
and 3D LIDAR data for a better visualization. The
person goes out of his car and starts walking. It is
illustrated in Figure (3) (c) that the tracking system
which uses a connected components algorithm for
segmentation is not able to detect the person. How-
ever, the proposed method detects and starts tracking
the person as shown in Figure (3) (d).
Table 2: The averaged standard deviation SD of velocity
differences between consecutive time frames.
SD
Kalman Filter 34.6
The proposed method 22.1
Because of the lack of ground truth, we mea-
sured the motion consistency of the proposed tracker.
For comparison, we applied an independent Kalman
filter for each well segmented vehicle (Bar-Shalom,
1987). It tracks the centroid of the objects for a
data sequence. Then we have measured the aver-
aged standard deviation SD of velocity differences be-
tween consecutive time frames. Object velocities are
expected to change smoothly in successive scans so
smaller SD value means better motion consistency of
the tracker. Table (2) tells that the proposed method
has a good motion consistency as well.
Integrated Object Segmentation and Tracking for 3D LIDAR Data
349
(a) (b)
(c) (d)
Figure 3: The scene at the time frame t = 288 is displayed by (a) a RGB image (for better understanding of the scene) and
(b) 3D LIDAR data. The black solid line shows the trajectory of the EGO vehicle. The result at t = 313 is obtained by (c) a
connected components algorithm and (d) the proposed method. For better visualization, the 3D bounding box is applied only
for the detected pedestrian.
5 CONCLUSIONS
We proposed a novel method for integrated tracking
and segmentation of 3D LIDAR data. It replaces the
consecutive processing pipeline with a simultaneous
tracking and segmentation framework. The conven-
tional processing pipeline of object tracking methods
performs the segmentation and tracking modules con-
secutively, e.g., they first apply a connected compo-
nent algorithm on a grid for object segmentation and
then track the segmented objects. However, when ob-
jects get close to each other, this approach might lead
to under-segmentation, which in turn induces inaccu-
rate tracking estimates. Therefore we present a new
approach in which segmentation and tracking mod-
ules profit from each other to resolve ambiguities in
complex dynamic scenes. Using a non-parametric
Bayesian method, the sequential distance dependent
Chinese Restaurant Process (s-ddCRP), enables us to
combine segmentation and tracking components in a
single coherent framework. After the pre-processing
step which maps measurements on a grid representa-
tion, the proposed method tracks each grid cell and
segments the environment in an integrated way. A
smoothing algorithm is applied to the estimated grid
cell velocities for better motion consistency of clus-
tered dynamic grid cells. Experiments on data ob-
tained with a Velodyne HDL64 scanner in real traffic
scenarios illustrate that the proposed approach has a
satisfactory detection performance and good motion
consistency between consecutive time frames. As a
future work, we plan to add an integrated classifica-
tion step to the proposed framework. Also, applying
a more stochastic tracking module, e.g. including oc-
clusion likelihood, would be interesting. In addition
to the connected components algorithm, we intend
to compare the performance of the proposed method
with other novel algorithms from the state of the art.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
350

ACKNOWLEDGEMENTS
We acknowledge the support by the EU’s
Seventh Framework Programme under grant
agreement no 607400 (TRAX, Training net-
work on tRAcking in compleX sensor systems)
http://www.trax.utwente.nl/.
REFERENCES
Alparone, L., Barni, M., Bartolini, F., and Cappellini, V.
(1996). Adaptively weighted vector-median filters
for motion-fields smoothing. In Acoustics, Speech,
and Signal Processing, 1996. ICASSP-96. Conference
Proceedings., 1996 IEEE International Conference
on, volume 4, pages 2267–2270. IEEE.
Azim, A. and Aycard, O. (2012). Detection, classification
and tracking of moving objects in a 3d environment.
In Intelligent Vehicles Symposium (IV), 2012 IEEE,
pages 802–807. IEEE.
Bar-Shalom, Y. (1987). Tracking and data association.
Academic Press Professional, Inc.
Blei, D. M. and Frazier, P. I. (2011). Distance dependent
chinese restaurant processes. The Journal of Machine
Learning Research, 12:2461–2488.
Choi, J., Ulbrich, S., Lichte, B., and Maurer, M. (2013).
Multi-target tracking using a 3d-lidar sensor for au-
tonomous vehicles. In Intelligent Transportation
Systems-(ITSC), 2013 16th International IEEE Con-
ference on, pages 881–886. IEEE.
Douillard, B., Underwood, J., Kuntz, N., Vlaskine, V.,
Quadros, A., Morton, P., and Frenkel, A. (2011).
On the segmentation of 3d lidar point clouds. In
Robotics and Automation (ICRA), 2011 IEEE Inter-
national Conference on, pages 2798–2805.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. International
Journal of Robotics Research (IJRR).
Gelman, A., Carlin, J. B., Stern, H. S., and Rubin, D. B.
(2003). Bayesian data analysis. Chapman and
Hall/CRC Texts in Statistical Science.
Li, Q., Zhang, L., Mao, Q., Zou, Q., Zhang, P., Feng, S.,
and Ochieng, W. (2014). Motion field estimation for a
dynamic scene using a 3d lidar. Sensors, 14(9):16672–
16691.
Montemerlo, M., Becker, J., Bhat, S., Dahlkamp, H., Dol-
gov, D., Ettinger, S., Haehnel, D., Hilden, T., Hoff-
mann, G., Huhnke, B., et al. (2008). Junior: The
stanford entry in the urban challenge. Journal of field
Robotics, 25(9):569–597.
Moosmann, F., Pink, O., and Stiller, C. (2009). Segmen-
tation of 3d lidar data in non-flat urban environments
using a local convexity criterion. In Intelligent Vehi-
cles Symposium, 2009 IEEE, pages 215–220. IEEE.
Morton, P., Douillard, B., and Underwood, J. (2011). An
evaluation of dynamic object tracking with 3d lidar.
In Proc. of the Australasian Conference on Robotics
& Automation (ACRA).
Petrovskaya, A. and Thrun, S. (2009). Model based vehicle
detection and tracking for autonomous urban driving.
Autonomous Robots, 26(2-3):123–139.
Pitman, J. et al. (2002). Combinatorial stochastic processes.
Technical Report 621, Dept. Statistics, UC Berkeley,
2002. Lecture notes for St. Flour course.
Tuncer, M. A. C. and Schulz, D. (2015). Monte carlo based
distance dependent chinese restaurant process for seg-
mentation of 3d lidar data using motion and spatial
features. In Information Fusion (Fusion), 2015 18th
International Conference on, pages 112–118. IEEE.
Urmson, C., Anhalt, J., Bagnell, D., Baker, C., Bittner, R.,
Clark, M., Dolan, J., Duggins, D., Galatali, T., Geyer,
C., et al. (2008). Autonomous driving in urban envi-
ronments: Boss and the urban challenge. Journal of
Field Robotics, 25(8):425–466.
Integrated Object Segmentation and Tracking for 3D LIDAR Data
351
