
Gamepad Control for Industrial Robots
New Ideas for the Improvement of Existing Control Devices
Maximilian Wagner
1
, Dennis Avdic
2
and Peter Heß
2
1
Nuremberg Campus of Technology, Nuremberg Institute of Technology, F
¨
urther Straße 246b, 90429 Nuremberg, Germany
2
Department of Mechanical Engineering and Building Services Engineering, Nuremberg Institute of Technology,
Keßlerplatz 12, 90489 Nuremberg, Germany
Keywords:
Gamepad, Industrial Robots, Robot Control Devices, Usability.
Abstract:
In the scope of this work, a frequently used gaming device—the gamepad—is investigated as a control device
for industrial robots in order to extract new ideas for the improvement of existing control devices. Thus,
an approach for the integration of a gamepad control in a common industrial robot system is developed and
implemented. The usability of the gamepad control is improved by adding a smartphone to the gamepad,
which serves as a display to show information to the user. Finally, the developed gamepad control is compared
with the operation via conventional control device.
1 INTRODUCTION
The sales of industrial robots reached the highest level
ever recorded in 2015 (IFR, International Federation
of Robotics, 2015). At the same time, modern prod-
ucts offer a lot of variety and diversity. Thus, small
and varying batch sizes are in the focus. In doing so,
a high flexibility becomes more important for indus-
trial robot systems. This requires a quick and easy
programming of the robots in order to lower the costs.
For this purpose, an intuitive Human Machine Inter-
face (HMI) for the robots is important as it lowers the
qualification skills needed by the user. In addition,
the time needed by inexperienced users to get started
with the robot is reduced by an intuitive interface.
Common control devices for industrial robots
have hardly changed in the past few years. Usually,
the user input is still done via buttons, whether they
are physical or virtual. Alternative devices exist in
the gaming industry. One of the most frequently used
gaming devices is the gamepad. In the scope of this
work, we investigate the gamepad as a control device
for industrial robots to obtain new ideas for the im-
provement of existing devices.
This paper is structured as follows: In Section 2
the related work on control devices for industrial
robots and on gamepads is shown. The approach for
the use of a gamepad as a control device for industrial
robots is explained in Section 3. The implementation
of this approach and a usability test of the gamepad
control is presented in Section 4. Only initial trends
are pointed out because of a currently low number of
test candidates. Finally, Section 5 concludes the paper
with a short summary and an outlook to future work.
2 RELATED WORK
This section shows the related work on control de-
vices for industrial robots. Furthermore, the gamepad
is explained in detail.
2.1 Industrial Robot Control Devices
The commonly used control device for industrial
robots is called Robot Teach Pendant (RTP). Almost
every robot manufacturer offers such a control device
included with the robot. The RTP varies from man-
ufacturer to manufacturer, but most of the time the
control is done through physical or virtual buttons.
Some devices have an additional joystick, 3D or 6D
mouse to achieve a more intuitive controlling of the
robot. Most applications can be accomplished with a
RTP. The usability can be improved by an extended
interface, as shown by Dose and Dillmann (Dose and
Dillmann, 2014). Usability tests have shown that
this method can be used without expert knowledge in
robotics and additionally reduces the set up time of a
new task dramatically.
368
Wagner, M., Avdic, D. and Heß, P.
Gamepad Control for Industrial Robots - New Ideas for the Improvement of Existing Control Devices.
DOI: 10.5220/0005982703680373
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 368-373
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Another method for moving the robot is the man-
ual hand guidance. With this method the program is
taught by positioning the robot to the desired place
by hand. Modern lightweight robots offer such a
function, but with larger robots, this is not yet avail-
able. For heavier robots the movement can be sup-
ported by the robot motors, as shown by Colombo et
al. (Colombo et al., 2006). The robot has a force
and torque sensor that recognizes an outer force and
moves to the desired position accordingly.
Guiding a robot by vocal input has been realized
by Pires (Pires, 2005). The user has a fixed set of
commands to guide the industrial robot through tasks.
The operator uses his voice and tells the robot when to
stop, open or close the gripper or start welding. The
huge advantage of this interface is the natural commu-
nication since it is the same interface humans use to
exchange information. Secondly, it is easy to change
from one robot to another by simply saying the appro-
priate command. Furthermore, it reduces complexity
as the set of existing commands is smaller.
Hand gesture and face recognition has gathered a
lot of interest lately and many different approaches
of gestures can be recognized. Some approaches uti-
lize color information of camera images, as shown by
Br
`
ethes et al. (Br
`
ethes et al., 2004) and by Malima
et al. (Malima et al., 2006). The identification of
body parts based on depth sequence data is consid-
ered by Liu and Fujimura (Liu and Fujimura, 2004).
The main problem in the context of gesture recogni-
tion is the gesture spotting, which means when a ges-
ture command is starting or ending.
Modern motion control devices like the Nintendo
Wii Remote have also been used successfully for the
guidance of an industrial robot, shown by Neto et al.
(Neto et al., 2010). It provides a user easy means to
control a robot without expert robot knowledge and a
wireless and intuitive way to deal with common in-
dustrial tasks such as pick and place. This approach
has been compared to the manual guidance of a robot
and showed, that the manual guidance was faster in
completing given applications.
Some gamepad controls for robots have already
been realized. Especially for mobile robots the game-
pad is a popular control device, e.g. used by Caccamo
et al. (Caccamo et al., 2015). Colombo et al. used
a gamepad for an industrial robot arm, but there is
no approach and no further investigation explained
(Colombo et al., 2006).
2.2 Gamepad
Gamepads were first developed within the video gam-
ing industry (Cummings, 2007). The first gamepads
consisted a D-pad and two buttons. The D-pad is a
plus shaped button, which can be tilted in four (up,
down, left and right) or eight (plus the diagonals) di-
rections. Thus, it is ideal for simple movement con-
trols. As the possibilities within games became more
complex, the movement control within the game had
to be easier and more intuitive. When the videogames
started to become three-dimensional the D-pad was
starting to lose its meaning. In order to give the user
more control, the analog stick was introduced. Its
sensitivity and intuitiveness as well as the possibility
to choose between more orientations made it popular
and the analog stick became the dominant control for
three-dimensional problems.
3 APPROACH
In this approach a gamepad is used for the control
of an industrial robot. Usually, directly controlling
the robot from an external device is not offered by
the robot manufacturer. Thus, further components are
necessary for the communication (cf. Figure 1). One
part of the system is the robot arm connected with its
controller. Furthermore, the gamepad is connected to
the control computer. A wireless connection is pre-
ferred to improve the movability of the user. In addi-
tion, there is a smartphone attached to the gamepad to
show information to the user. It is used as a display
and also connected wirelessly to the control computer
by Wi-Fi. The control computer and the robot con-
troller are also connected to each other.
The main software part of this approach runs on
the control computer. The control software continu-
ously receives the state of the gamepad (cf. Figure 2).
All changes of the state—the pressing of a button or
the deflection of an analog stick—are processed fur-
Control
computer
Smartphone
Gamepad
Robot
controller
Robot arm
Control software
Visualization app
Interpreter program
Figure 1: System overview for the gamepad control for in-
dustrial robots.
Gamepad Control for Industrial Robots - New Ideas for the Improvement of Existing Control Devices
369
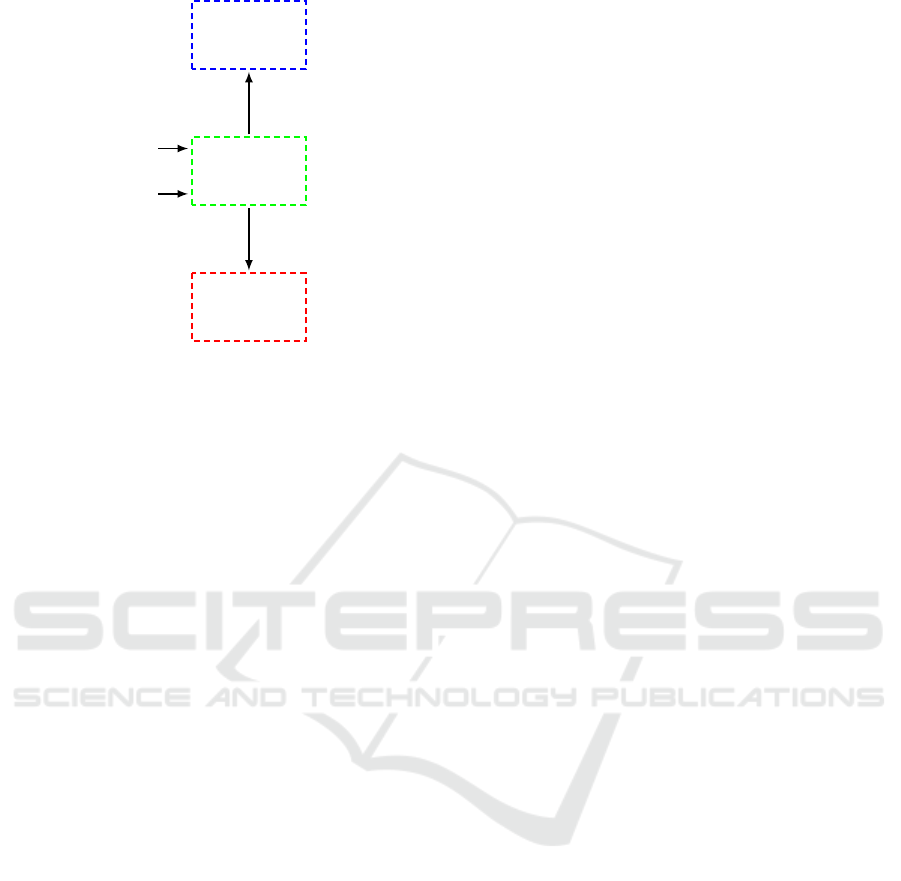
Control
software
Visualisation
app
Interpreter
program
Gamepad state
Settings file
Visualization data
Desired values
Figure 2: Software overview for the gamepad control for
industrial robots.
ther. Similar to conventional robot control devices, a
safety function is also integrated in order to prevent
unintentional entries. Thus, buttons can be used as
release buttons and a robot action is initialized only
if these buttons are pressed. The resulting action for
each input is defined in a settings file. Each line of
the file contains a setting consisting a button or axis
parameter and a robot action parameter. The axis pa-
rameters also consist a modifier to regulate the sen-
sitivity. Thus, the settings can be changed quickly
by editing the settings file. The desired values for
the robot are estimated from the combination between
the gamepad state and the settings. They are sent to
the robot controller by the control software. The in-
terpreter program reads the information and executes
the appropriate robot commands. To provide the user
with information, the software sends the relevant data
to the visualization app.
Notheis et al. (Notheis et al., 2014) suggested that
visual hints for the movement of robots were helpful
for the participants. We adopted this idea and inte-
grated a visualization which would help the user to
understand the controls and shorten the learning pro-
cess for operating the industrial robot. Since an in-
dustrial robot can quickly cause damage to the equip-
ment when it is used by an inexperienced user, we
were seeking an opportunity to avoid collisions. Most
collisions and problems happen because of a lack of
robotic-human awareness. Drury et al. (Drury et al.,
2003) described that many users collided with objects
even though sensors indicated them. We assumed that
this might be due to an abundance of input data which
might lead the user to involuntarily ignore certain in-
formation. Based on this assumption the app is mod-
ified to only show the input options that are currently
necessary to conduct a certain movement.
4 EXPERIMENTS AND RESULTS
In this section, the implementation of the approach
described above is presented (cf. Section 4.1). It be-
gins by outlining the used hardware. Furthermore, the
software implementation is described in detail. Fi-
nally, the usability of the realized approach is exam-
ined (cf. Section 4.2).
4.1 Implementation
For the implementation of the approach four main
hardware components are necessary: a robot with its
controller, a control computer, a smartphone and a
gamepad. A KUKA KR 6 R900 sixx industrial robot
arm is used as robot for the implementation. It has
six axis and a separate robot controller. A software
package for the XML communication via Ethernet
offered by the robot manufacturer is installed on the
controller. The control computer has an Intel Core i7
CPU and 16 GB RAM. Its operating system is Win-
dows 8.1. A Google LG Nexus 5 smartphone with
Android 6.0.1 is used as a display for the user. It is
fixed to the gamepad by a self-constructed adapter. A
Microsoft Xbox 360 Wireless Controller for Windows
is used as gamepad. As the name already indicates,
it is a wireless controller and connected to the con-
trol computer by an usb-transceiver. The gamepad is
equipped with two analog sticks and one D-pad. Fur-
thermore, the gamepad is equipped with two triggers
and ten buttons. Two of these buttons are integrated
in the analog sticks.
The control software is realized with C# and the
.NET Framework. All connections are initialized
from this software. The open source framework
SlimDX is utilized for the connection with the game-
pad. For the network connections the data is sent to a
connected socket by the System.Net.Sockets names-
pace. An user interface for the configuration of the
settings file is implemented in the software to simplify
the configuration process (cf. Figure 3). Through this
interface the settings can be changed by clicking on
the robot parameter and subsequently entering the ac-
companying gamepad button or axis. The modifier
can be changed by a slide control next to each axis
setting. The specific settings selected for this imple-
mentation are explained in the back of this section.
An XML file is utilized for the communication be-
tween the control computer and the robot. It is trans-
fered by the control software via Ethernet continu-
ously. It contains parameters for a target robot posi-
tion and robot axes values, a gripper state and a mode
parameter to select between cartesian and axes move-
ment. Inside of the interpreter program the XML file
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
370
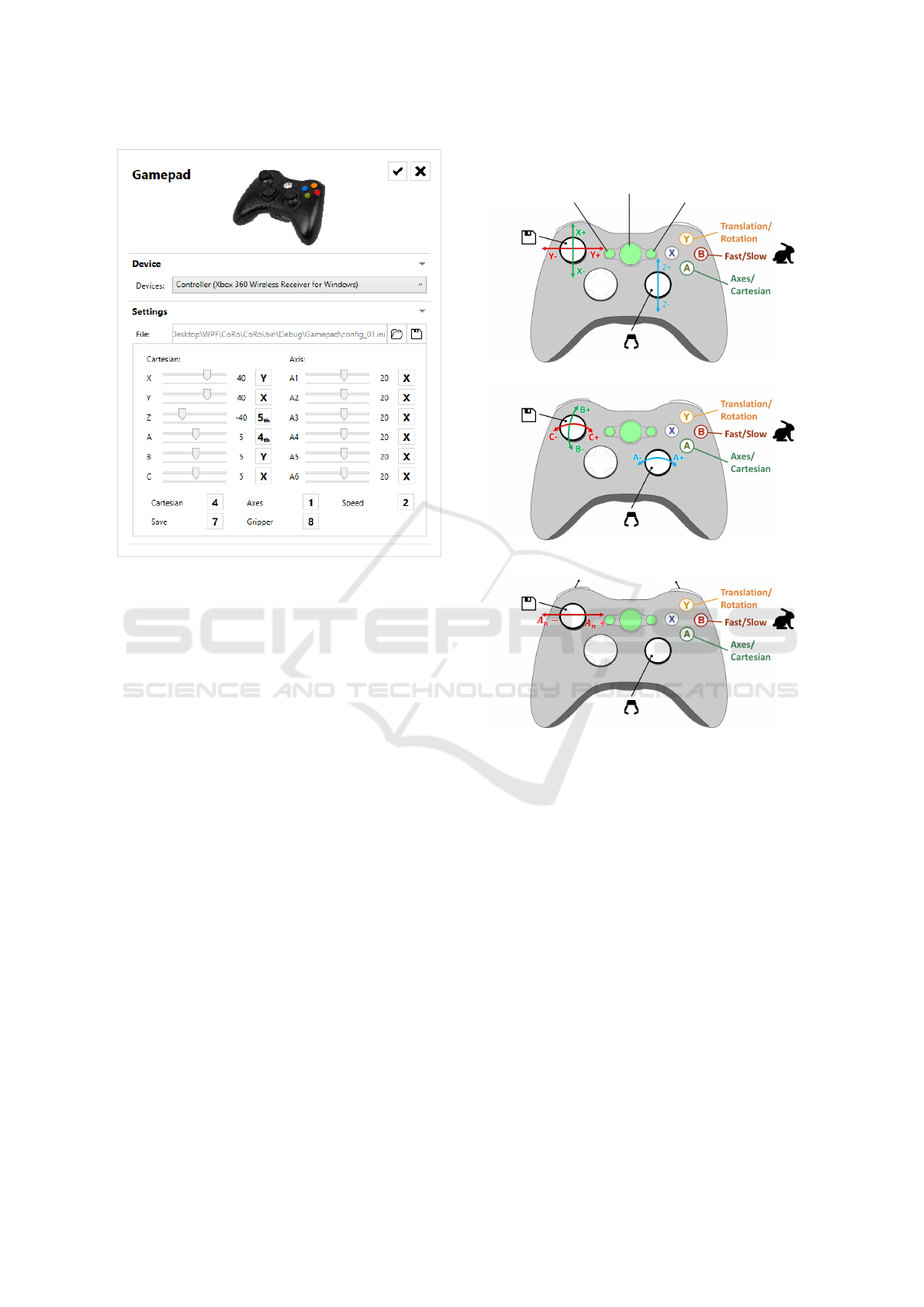
Figure 3: Settings window in the control software for the
gamepad control.
is read and subsequently robot actions are executed
based on the parameters. This is also done continu-
ously to ensure a rapidly execution.
The main part of the visualization app is an im-
age of the gamepad (cf. Figure 4). It contains in-
formation about the action connected with each but-
ton. Depending on the selected mode it contains
also information about the actions connected with
the analog sticks. There are three modes defined:
two cartesian modes (translation and rotation) and
an axes mode. The switching between the two carte-
sian modes is done by the Y-button. The A-button
switches between the cartesian modes and the axes
mode. The selected axis can be changed by the two
buttons on the top of the gamepad. The left button
reduces the axis index by one and the right button in-
creases the index by one. Two speed levels (fast and
slow) are implemented for a regulation of the move-
ment speed. A switching between these two levels can
be done by the B-button. The two speed levels are vi-
sualized by a turtle and a rabbit icon to achieve a bet-
ter perception. Furthermore, the states of the connec-
tions between robot controller and control computer
as well as between gamepad and control computer are
visualized by colored areas. Thus, the user can easily
check the connection states of the system. In addition,
the safety button state is visualized in the same way to
give a feedback of the pressed safety button. The two
Gamepad
connection
state
Safety
button state
Robot
connection
state
(a) Translation mode.
(b) Rotation mode.
n − 1
n + 1
n = 1
(c) Axes mode.
Figure 4: Different modes in the visualization app.
triggers are used as safety buttons. They need to be
pressed to achieve any kind of action. The gripper
can be opened and closed by pressing the right ana-
log stick. A robot position is added to a program by
pressing the left analog stick. We were considering to
use the D-pad as well but decided against it since it is
suggested by Cummings that a D-pad performs worse
for 3D tasks (Cummings, 2007).
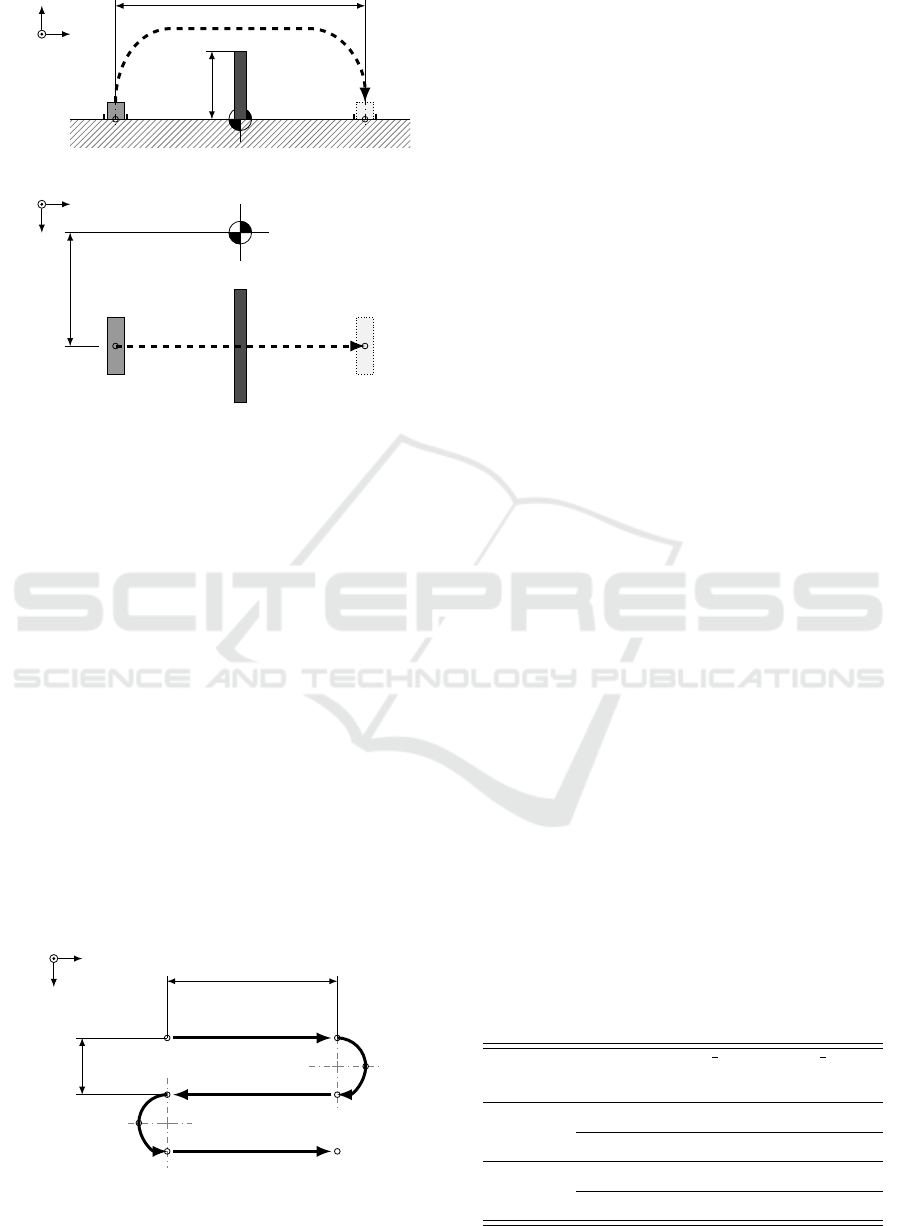
4.2 Usability Test
With the implemented gamepad control for an indus-
trial robot arm a usability test is conceived. Thus, two
tasks are defined which represent frequent sequences
of industrial robot applications. The first task is a sim-
ple pick and place task (cf. Figure 5). An object has
to be moved from a position p
1
= (500 − 500 0)
T
to a position p
2
= (500 500 0)
T
, all units are in mm.
Gamepad Control for Industrial Robots - New Ideas for the Improvement of Existing Control Devices
371
+
p
1
+
p
2
1000
300
Robot base
+
p
1
+
p
2
500
z
y
x
x
y
z
Figure 5: First task for the usability test of the gamepad
control for industrial robots.
In doing so, an obstacle at y = 0 mm with a height
of 300 mm must be overcome. The two positions are
marked by bars which support the positioning. Be-
tween these bars the object has a clearance of 1.5 mm.
The exact path points are not specified. For this task a
gripper, fitting to the moved object, is mounted on the
robot arm.
For the second task the robot has to be moved
along an s-shaped path (cf. Figure 6). The linear part
of the path has a length of 300 mm in y-direction.
The neighboring linear parts are linked by an arc with
a radius of 50 mm. A pen is attached to the robot arm
to achieve a visible path by drawing on a plane. All
points of the path are marked by a circle with 5 mm
radius. Before the first position and after the last po-
sition of the path the tool has to be moved up in z-
direction to get a distance between the tool and the
plane.
+
p
1
+
p
2
+
p
3
+
p
4
+
p
5
+
p
6
+
p
7
+
p
8
300
100
x
y
z
Figure 6: Second task for the usability test of the gamepad
control for industrial robots.
These two tasks are performed with the conven-
tional RTP and with the gamepad control by ten test
users so far. The time required for each performed
task is recorded. In order to avoid understanding re-
lated errors each task is done twice with each of the
devices. Thus, eight time values result for each test
user, four with the RTP (t
P
) and four with the game-
pad (t
G
). The mean values of all users are summa-
rized in Table 1. It appears that lower average times
are achieved with the gamepad control. Due to the
smaller difference between first and second attempt,
the game pad appears to be more intuitive to learn.
In addition, user data about the age, the experience
and the perception of the usability is documented.
Because of the above-mentioned low number of test
candidates a more detailed evaluation does not make
sense until now.
5 CONCLUSIONS
Within this paper we have developed a software,
which reads inputs from a common gamepad device,
translates these inputs and refers them to the robot
controller, which commands the movement of an in-
dustrial robot. In order to simplify the guiding pro-
cess and to reduce the training time of the user, we
have integrated an easy and self-explanatory inter-
face, which has only the necessary functionalities in-
cluded. The method of robot manipulation with a
gamepad is tested in two different tasks. Every user
had to perfom every task twice with the RTP and
twice with the gamepad. In the first tests, lower times
are achieved with the gamepad control. In addition,
all users strongly preferred the gamepad as a manipu-
lator over the RTP.
From this we are inclined to suggest that the
gamepad seems to be more intuitive to users then the
RTP. However, due to the small number of test users,
no valid statement can be determined until now. Thus,
the usability test should be extended to more users
with different ages and levels of experience to con-
clude if the gamepad is faster and more intuitive then
Table 1: Mean time values for the usability test tasks.
Task Attempt
t
P
t
G
(min:s) (min:s)
Pick and 1
7:57 5:29
place 2
5:27 4:16
Path
1
7:11 4:38
2
5:45 4:07
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
372

the RTP. In addition, the hardware could be improved
by constructing a smartphone adapter that results a
center of mass in the middle of the gamepad and not
infront of it. Thus, the handling of the device could
be improved.
REFERENCES
Br
`
ethes, L., Menezes, P., Lerasle, F., and Hayet, J.
(2004). Face tracking and hand gesture recognition
for human-robot interaction. In Proceedings of the In-
ternational Conference on Robotics and Automation
(ICRA 2004), volume 2, pages 1901–1906. IEEE.
Caccamo, S., Parasuraman, R., B
˚
aberg, F., and
¨
Ogren, P.
(2015). Extending a UGV teleoperation FLC interface
with wireless network connectivity information. In
Proceedings of the International Conference on Intel-
ligent Robots and Systems (IROS 2015), pages 4305–
4312. IEEE.
Colombo, D., Dallefrate, D., and Tosatti, L. M. (2006). PC
based control systems for compliance control and in-
tuitive programming of industrial robots. In Proceed-
ings of the International Symposium on Robotics (ISR
2006), Munich, Germany. VDE-Verlag.
Cummings, A. H. (2007). The evolution of game controllers
and control schemes and their effect on their games.
In Proceedings of the Interactive Multimedia Confer-
ence. University of Southampton.
Dose, S. and Dillmann, R. (2014). Eine intuitive Mensch-
Maschine-Schnittstelle f
¨
ur die automatisierte Kleinse-
rienmontage. Shaker Verlag, Herzogenrath, Germany.
Drury, J. L., Scholtz, J., and Yanco, H. A. (2003). Aware-
ness in human-robot interactions. In Proceedings of
the International Conference on Systems, Man and
Cybernetics (SMC 2003), volume 1, pages 912–918.
IEEE.
IFR, International Federation of Robotics (2015). World
Robotics 2015 Industrial Robots. VDMA-Verlag,
Frankfurt, Germany.
Liu, X. and Fujimura, K. (2004). Hand gesture recognition
using depth data. In Proceedings of the International
Conference on Automatic Face and Gesture Recogni-
tion, pages 529–534. IEEE.
Malima, A.,
¨
Ozg
¨
ur, E., and Cetin, M. (2006). A fast al-
gorithm for vision-based hand gesture recognition for
robot control. In Signal Processing and Communica-
tions Applications, pages 1–4. IEEE.
Neto, P., Pires, J., and Moreira, A. P. (2010). High-level
programming and control for industrial robotics: us-
ing a hand-held accelerometer-based input device for
gesture and posture recognition. In Industrial Robot:
An International Journal, volume 37, Bingley, United
Kingdom. Emerald Group Publishing Limited.
Notheis, S., Hein, B., and W
¨
orn, H. (2014). Evalua-
tion of a method for intuitive telemanipulation based
on view-dependent mapping and inhibition of move-
ments. In Proceedings of the International Conference
on Robotics & Automation (ICRA 2014), pages 5965–
5970. IEEE.
Pires, J. (2005). Robot-by-voice: Experiments on com-
manding an industrial robot using the human voice.
In Industrial Robot: An International Journal, vol-
ume 32, Bingley, United Kingdom. Emerald Group
Publishing Limited.
Gamepad Control for Industrial Robots - New Ideas for the Improvement of Existing Control Devices
373
