
Linear Software Models: Modularity Analysis by the
Laplacian Matrix
Iaakov Exman and Rawi Sakhnini
Software Engineering Dept., The Jerusalem College of Engineering – JCE-Azrieli, Jerusalem, Israel
Keywords: Linear Software Models, Modularity Matrix, Laplacian Matrix, Connected Components, Eigenvectors,
Zero-valued Eigenvalues, Bipartite Graph, Software Redesign, Coupling Resolution, Outliers.
Abstract: We have recently shown that one can obtain the number and sizes of modules of a software system from the
eigenvectors of the Modularity Matrix weighted by an affinity matrix. However such a weighting still
demands a suitable definition of an affinity. This paper obtains the same results by means of a Laplacian
Matrix, directly based upon the Modularity Matrix without the need of weighting. These formalizations are
different alternatives leading to the same outcomes based upon a central idea: modules are connected
components. The important point is that, independently of specific advantages of given techniques, there is
just one single unified algebraic theory of software composition – the Linear Software Models – behind the
different approaches. The specifics of the Laplacian Matrix technique, after its formal enunciation, are
illustrated by calculations made for case studies.
1 INTRODUCTION
Software engineering is an exercise in composition
(Fall, 2016). A software system is composed from
subsystems, which are made of sub-subsystems and
so on for each hierarchy level of the system, down to
indivisible components. The problem to be solved is
which components are needed to satisfy the system
required functionalities. It is widely accepted that
modularity is essential to solve this problem.
Our Linear Software Models approach uses
Modularity Matrices linking component structures to
their functionalities, see (Exman, 2012 and 2013).
The outcome is a set of modules in the respective
hierarchical level of the software system.
Recently we have shown that numbers and sizes
of the referred modules can be precisely obtained
from eigenvectors of the Modularity Matrix suitably
weighted by an affinity matrix (Exman, 2015).
In this paper we show that the same numbers and
sizes of modules are obtained from the eigenvectors
of a Laplacian Matrix, directly derived from the
Modularity Matrix, without the need of weighting.
In this Introduction we review properties of the
Modularity Matrix and the Laplacian Matrix.
1.1 Modularity Matrix Concepts
Modularity is the antithesis of coupling between
software components. Thus, a theory of modular
composition must clearly define coupling. An
intuitive notion of coupling is given in the Design
Patterns GoF book Glossary (Gamma et al., 1995):
coupling is the degree to which software
components depend on each other. In our Linear
Software Models, this is translated to "coupling is
linear dependence" among software components.
To apply the theory, a Modularity Matrix
(Exman, 2014) is constructed for each software
system. The matrix displays relations between the
software system architectural entities: column
structors, and row functionals. Structors generalize
UML classes and functionals generalize methods. A
1-valued matrix element means that the column
structor provides a functional in the respective row.
To avoid couplings, a standard Modularity
Matrix must have all its structors and respectively all
its functionals linearly independent. From linear
algebra it follows that the standard Modularity
Matrix is square. If certain structor sub-sets provide
sub-sets of functionals disjoint to other sub-sets, the
matrix is strictly block-diagonal. These blocks are
the desired independent modules.
100
Exman, I. and Sakhnini, R.
Linear Software Models: Modularity Analysis by the Laplacian Matrix.
DOI: 10.5220/0005985601000108
In Proceedings of the 11th International Joint Conference on Software Technologies (ICSOFT 2016) - Volume 2: ICSOFT-PT, pages 100-108
ISBN: 978-989-758-194-6
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
In a standard Modularity Matrix modules are
irreducible – cannot be broken into smaller modules.
All the matrix elements outside modules are zero-
valued, the modules are orthogonal thus mutually
linearly independent. One easily shows that
eigenvectors of a suitably weighted Modularity
Matrix precisely reflect module sizes. This spectral
approach (Exman, 2015) is illustrated in Fig. 1.
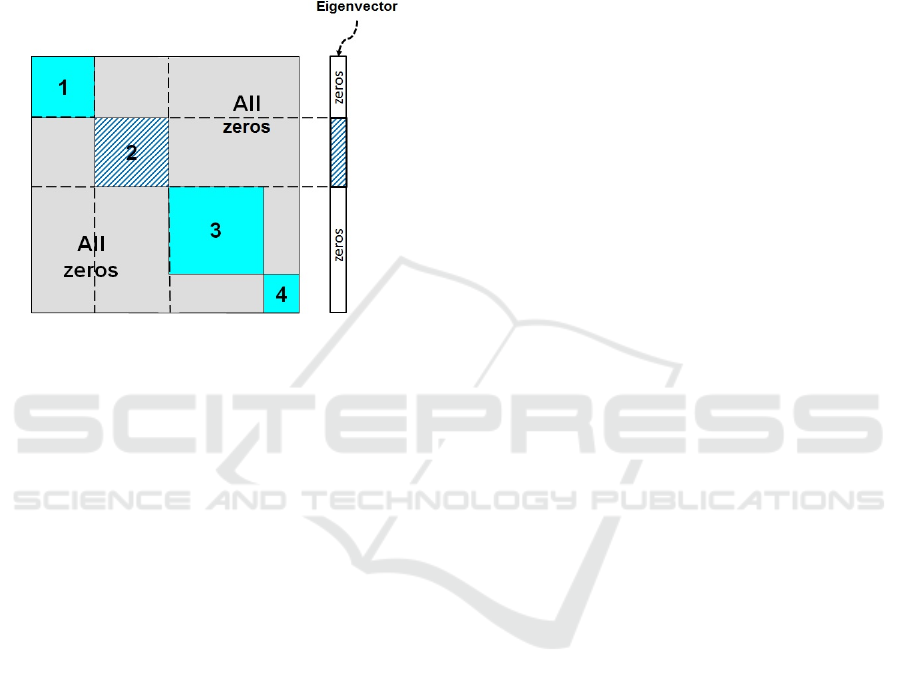
Figure 1: Schematic Modularity Matrix with a fitting
eigenvector – The square block-diagonal matrix has 4
numbered modules (blue background). The eigenvector at
the right-hand-side of the matrix precisely reflects the size
of module #2 (with hatched background).
1.2 Laplacian Matrix Concepts
A generic Laplacian matrix is defined upon a graph.
For software systems the graph is undirected, and
edges link the referred architectural units – structors
and functionals – where each unit is a vertex in the
graph. Formally the Laplacian
L
is given by:
LDA
(1)
where D is the Degree Matrix – showing the degree
deg( )iv
of vertex
iv
in its diagonal element iiD –
and
A
is the Adjacency Matrix – showing for each
,ij
pair of vertices whether they are adjacent in the
graph. Adjacent vertices have a 1-valued
A
ij
matrix
element and 0-valued otherwise.
Laplacian properties of interest are:
L is symmetric;
The number of zero-valued eigenvalues of the
Laplacian Matrix is the number of graph
connected components.
1.3 Modules as Connected Components
This paper’s purpose is to show that for:
strictly block-diagonal Modularity Matrix – the
same results are obtained by means of the
eigenvectors of the Laplacian Matrix;
case of outliers – a neat procedure is formulated
to highlight residual coupling.
The argument centrepiece is that modules are
connected components. This is true for blocks of the
block-diagonal Modularity Matrix (Exman, 2014),
sub-lattices of a Modularity Lattice (Exman and
Speicher, 2015) or sub-graphs obtaining a Laplacian
Matrix in this paper. One follows the next steps:
a)
Generate a Bipartite Graph – from the
Modularity Matrix;
b)
Obtain the Laplacian Matrix – from the
generated graph;
c)
Software Modules are Connected Components
– seen in the graph and in the corresponding
Laplacian;
d)
Number of Modules – is set by the number of
zero-valued Laplacian eigenvalues;
e)
Sizes of Modules – are given by the non-zero
elements of Laplacian eigenvectors;
f)
Modules Sparsity – may demand module
splitting to assure sparsity below a threshold,
thereby highlighting outlier coupling in need of
redesign.
The above steps will be first intuitively illustrated by
an introductory example. Then, formal proofs will
be provided in a subsequent section.
1.4 Organization of the Paper
The remaining of this paper is organized as follows.
Section 2 mentions related work. Section 3 displays
an introductory example. Section 4 formulates
theoretical considerations. Section 5 presents case-
studies. A discussion concludes the paper.
2 RELATED WORK
2.1 Modularity Analysis
Various techniques are suitable for modularity
analysis. Here is a short sample of approaches.
Baldwin and Clark, in their “Design Rules” book
(Baldwin and Clark, 2000), describe a Design
Structure Matrix (DSM) upon which one adds an
economic design model. DSM has also been applied
to software engineering (Cai and Sullivan, 2006).
Conceptual lattices were introduced in (Wille,
1982) within Formal Concept Analysis (FCA). This
Linear Software Models: Modularity Analysis by the Laplacian Matrix
101
technique has been used for modularization and
software system design, e.g. (Siff and Reps, 1999).
In previous spectral work we have used
eigenvectors of the Modularity Matrix symmetrized
and weighted by an Affinity (Exman, 2015) to
extract software system modules' numbers and sizes.
2.2 Laplacian Matrix Techniques
Spectral techniques based upon the Laplacian Matrix
have been used in various contexts, including
software engineering. A good survey on Laplacian
matrices of graphs is (Merris, 1994).
A tutorial on spectral clustering, with emphasis
on Laplacian techniques is (von Luxburg, 2007). A
more recent review on clustering methodologies for
software engineering, of spectral methods in general
and in particular the Laplacian is (Shtern and
Tzerpos, 2012).
Ng et al. (Ng et al., 2001) deal with spectral
clustering, analysing an algorithm, explicitly
referring to the Laplacian. Shokoufandeh et al.
(Shokoufandeh, 2005) extract a Module Dependency
Graph (MDG) from software source code for
clustering into MDG partitions. Their
Modularization Quality criterion is reformulated as a
Laplacian eigenvalue problem.
3 INTRODUCTORY EXAMPLE:
PROTOTYPE PATTERN
3.1 Prototype Modularity Matrix and
Bipartite Graph
The Prototype design pattern, is defined in the GoF
book (Gamma et al., 1995). It creates new objects by
copying a prototypical instance. Here it serves as an
introductory strictly block-diagonal example.
The Modularity Matrix’ structors in our example
are a generic cloneable shape and a specific shape
(say a circle or a square), a shapes’ cache to store
prototype instances ready to be cloned, and a client
which asks the prototype to clone itself.
The pattern functionals include ‘cloning’, any
‘specific shape calculation’, say its area, ‘loading or
getting the cache’ and a ‘main’. A commercial Java
Prototype code, similar to one fitting our model, is
(Prototype, 2016).
The Prototype Modularity Matrix in Fig. 2 is
strictly block-diagonal. Fig. 3 shows the respective
undirected bipartite graph obtained from this
Prototype Modularity Matrix.
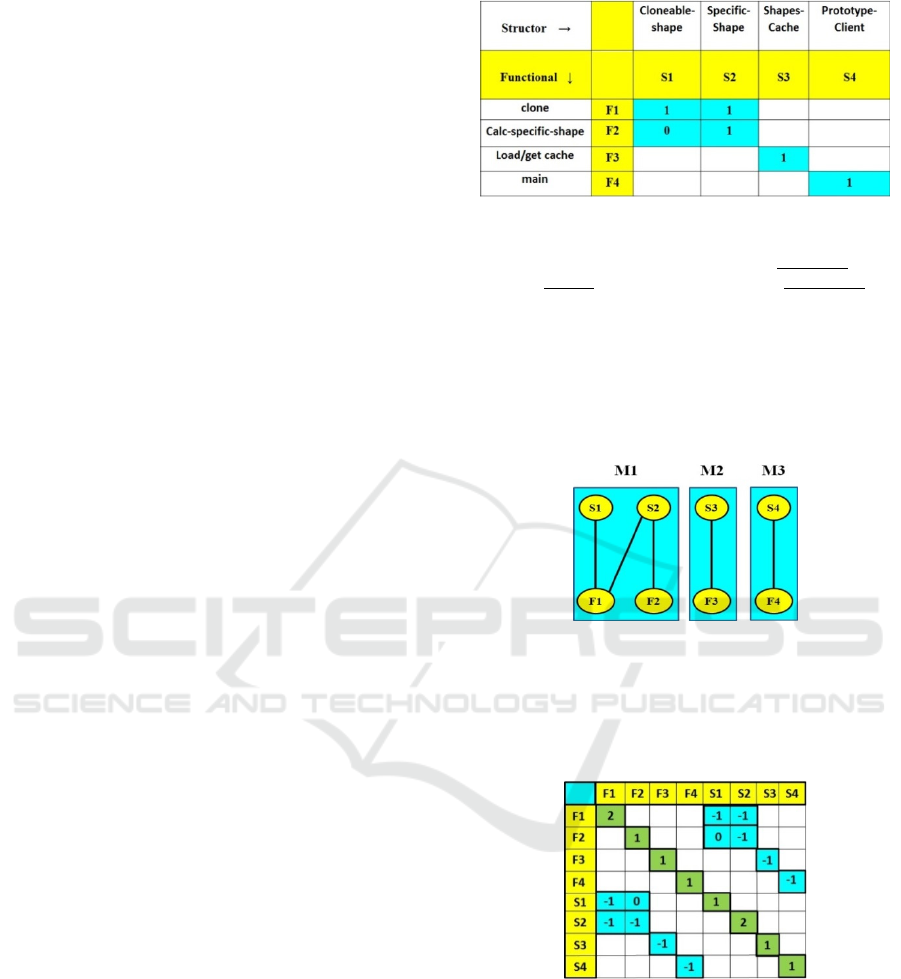
Figure 2: Prototype Design Pattern Modularity Matrix –
There are 4 structors and functionals in this matrix. These
form 3 modules (blue background): a- upper-left shape
role; b- middle shapes-cache role; c- lower-right the
prototype client. Zero-valued matrix elements outside the
modules are omitted for clarity in all matrix figures.
As an illustration, each 1-valued element in the
Matrix originates one edge, e.g. a 1-valued element
in column S3 and row F3 of the matrix originates an
edge between the S3 and F3 vertices in Fig. 3.
Figure 3: Prototype Bipartite undirected Graph – It is
obtained from the Modularity Matrix in Fig. 2. A structor
Sj is linked to a functional Fi by a graph edge if the
respective (i, j) Matrix element is 1-valued. Separate graph
modules Mk, having no common edges, are highlighted
by light blue background, as the diagonal matrix blocks.
Figure 4: Prototype Laplacian Matrix – Laplacian rows
and columns are labelled by vertices of the graph in Fig. 3.
Adjacency values, in the top-right quadrant, are identical
to the Modularity Matrix with a minus sign, and by
symmetry also found in the bottom-left quadrant. Vertex
degrees are in the Laplacian diagonal.
3.2 Prototype Laplacian Matrix and Its
Eigenvectors and Eigenvalues
We use the Prototype Graph in Fig. 3 to generate the
Prototype Laplacian Matrix seen in Fig. 4. The
ICSOFT-PT 2016 - 11th International Conference on Software Paradigm Trends
102
Laplacian is symmetric as it uses all the graph
vertices to label both the Laplacian columns and its
rows. The graph edges provide Adjacency values –
with a minus sign by eq. (1) in section 1.2 – and the
number of edges per vertex gives the vertices’
degrees, the values in the Laplacian diagonal.
The number of zero-valued eigenvalues of this
matrix gives the number of connected components.
Calculation obtains 3 such eigenvalues. The
respective eigenvectors are seen in Fig 5.
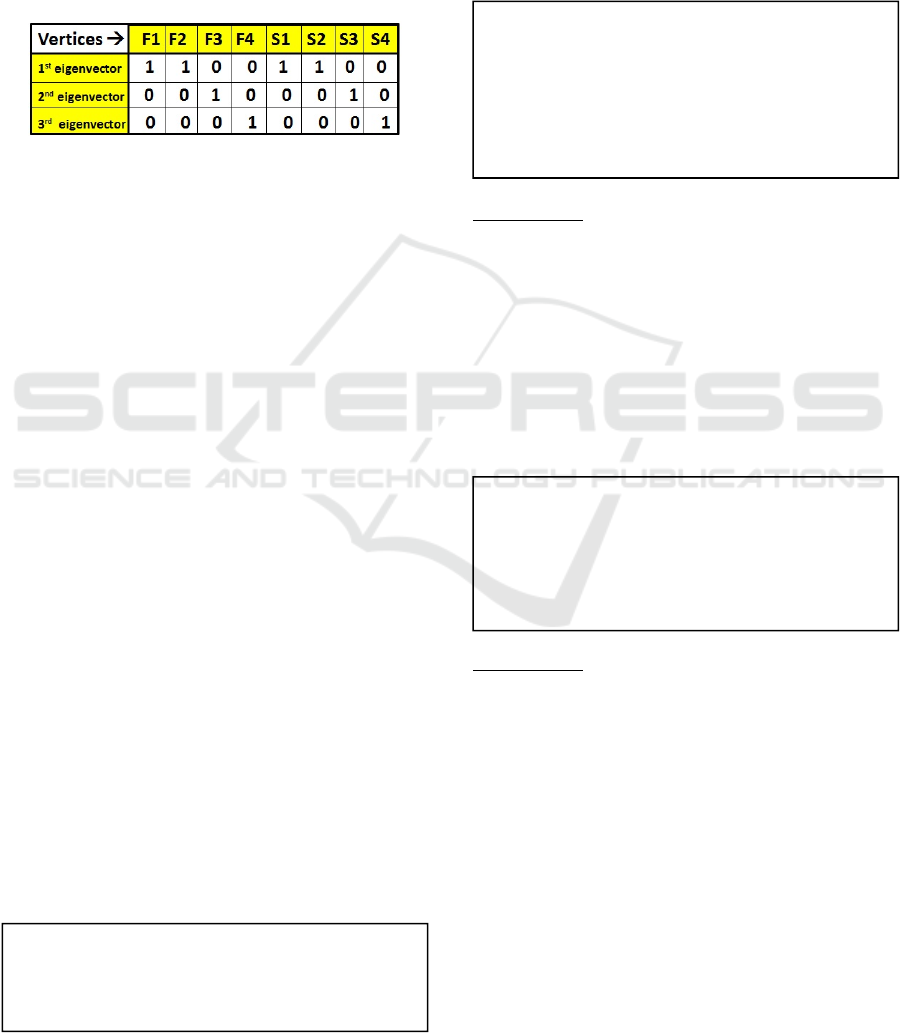
Figure 5: Prototype Laplacian Eigenvectors – These are
the three eigenvectors corresponding to the three
eigenvalues with zero values. Each of the eigenvectors
directly shows one of the connected components, thus the
respective Prototype modules, through the vertices in the
modules.
From the eigenvectors in Fig. 5 one sees that the
connected components, viz. the Prototype modules
are given by the following functionals and structors:
a- F1+S1+F2+S2; b- F3+S3; c- F4+S4.
4 THEORETICAL
CONSIDERATIONS
Here we make a three-step theoretical statement
about modules of a standard Modularity Matrix:
1.
The standard Modularity Matrix modules are
connected components;
2.
Modules’ number and sizes are respectively
obtained from the Laplacian Matrix zero-valued
eigenvalues and their eigenvectors;
3.
Outliers are dealt with by demanding low
module sparsity.
A procedure to obtain module sizes follows.
4.1 Modularity Matrix Modules Are
Connected Components
We start with a definition of modules, given earlier
in (Exman, 2014):
The diagonal blocks are orthogonal, i.e. the
structors of a given diagonal block are orthogonal –
have zero inner product – to the structors of any
other diagonal block in the matrix. This is also true
mutatis mutandis for the functionals of a given
diagonal block. For example, in the matrix of Fig. 2
there are three such orthogonal blocks.
Next, we show that a bipartite graph can be
generated from a standard Modularity Matrix.
Proof Outline:
The proof is by construction. First, list all the matrix
structors as a set of vertices, then all the matrix
functionals as an opposing set of vertices. Scanning
all matrix elements from top-left to bottom-right, for
each 1-valued element add an edge linking the
structor vertex to the respective functional vertex.
This is illustrated by the graph in Fig. 3.
Now we state a basic result of this paper, needed to
show the feasibility of Laplacian Matrix analysis of
Modularity.
Proof Outline:
A 1-valued Modulary matrix element is connected to
another matrix element, if its structor has at least
two 1-valued elements in its column or its functional
has at least two 1-valued elements in its row.
Modularity Matrix modules are diagonal blocks
whose set of structors and functionals are disjoint
from the respective sets of the other modules. Thus:
a.
All structors/functionals in each module are
connected – Every 1-valued Modularity Matrix
element in a module is connected to other matrix
elements in the same module;
b.
Different modules are disconnected;
Therefore the undirected bipartite graph generated
from the Modularity Matrix has each of the modules
as a connected component with no edges linking to
Definition 1: Software Modules
Software Modules of the standard Modularity
Matrix, at a given abstraction level, are the
disjoint diagonal blocks of structors/functionals.
Lemma 1: Undirected Bipartite Graph from
standard Modularity Matrix
It is possible to generate a unique undirected
bipartite graph from a given standard Modularity
Matrix, linking a set of vertices standing for
structors to another set of vertices standing for
functionals.
Theorem 1: Modularity Matrix Modules are
Connected Components
The modules of a software system in its standard
Modularity Matrix are connected components
which can be obtained from the corresponding
generated undirected Bipartite Graph.
Linear Software Models: Modularity Analysis by the Laplacian Matrix
103
other modules.
4.2 Modularity Lattice Modules from
the Laplacian Matrix
Once one has an undirected bipartite graph fitting
the Modularity Matrix of a software system, one
generates the graph Laplacian matrix and calculates
number and sizes of the software system modules.
Proof Outline:
The straightforward proof is again by construction.
From the undirected bipartite graph:
a.
Generate the Adjacency Matrix;
b. Generate the Degree Matrix D;
c.
Generate the Laplacian by equation (1) of
section 1.2, viz.
LDA.
This construction is illustrated in Fig. 4.
It is straightforward to obtain the number of the
software system modules and their sizes from the
Laplacian Matrix. This is given by the next theorem.
Proof Outline:
By theorem 1 modules are connected components of
the undirected bipartite graph generated from the
Modularity Matrix. The Laplacian is obtained from
this bipartite graph. The current theorem directly
follows from the Laplacian matrices spectral
theorem, e.g. (von Luxburg, 2007) page 4,
proposition 2. The number of a graph connected
components is the number of its Laplacian zero-
valued eigenvalues. Component sizes are obtained
from the respective eigenvectors.
4.3 Dealing with Outliers through
Laplacian Matrices
The ultimate purpose of Modularity Analysis is to
redesign software systems having design problems.
As pointed out in previous papers (Exman, 2014),
the Modularity Matrix highlights problematic spots,
such as residual couplings, by means of outliers, i.e.
matrix elements outside the desired modules.
But, the question is first of all, what are the sizes
of the modules? One could always enlarge a module
size to include eventual outliers. Spectral
approaches, either directly from the Modularity
Matrix as in (Exman, 2015) or here by means of the
Laplacian Matrix, answer this important question.
In our previous work the criterion to determine
whether a matrix element is an outlier was cohesion:
A legitimate module has low sparsity – i.e. the
number of zero-valued matrix elements is less
than the non-zero matrix elements.
We continue to use the cohesion argument, now
augmented by the connected component property,
seen in the next extended definition.
Theorem 1 in section 4.1 enables to check that a
module is a Connected Component, using the
undirected Bipartite Graph. The same graph allows
checking the sparsity, as seen in the next Lemma.
Proof Outline:
Sparsity is defined as the ratio of zero-valued matrix
elements to the total number of matrix elements in
the module. Given that: a- each edge in the Bipartite
Graph is originated by a 1-valued matrix element in
the module; b- each module is square, i.e. the
number of structors equals the number of functionals
in the module; the Lemma is easily obtained.
Lemma 2: Laplacian Matrix from the
Undirected Bipartite Graph
– a unique
Laplacian is generated from the Undirected
Bipartite Graph of a given software system.
Theorem 2: Software System Modules’
Number and Sizes from the Laplacian Matrix
The number and sizes of the modules of a
software system at a given abstraction level is
obtained from the Laplacian Matrix of the
undirected bipartite graph of its Modularity
Matrix as follows:
a.
The module number is the number of zero-
valued Laplacian eigenvalues
;
b.
The module sizes are given by the respective
indicator eigenvectors of the zero-valued
Laplacian eigenvalues.
Definition 2: Software Module Cohesion
The cohesion of a Software System Module, at a
given abstraction level, is determined by:
a-
Having low sparsity;
b-
Being a Connected Component.
Lemma 3: Module Sparsity from Bipartite
Graph
The module sparsity in the Bipartite Graph is:
Sparsity = 1
– ( Nedges )
Nstructors
2
where Nstructors is the number of structors and
Nedges is the number of edges in the module.
ICSOFT-PT 2016 - 11th International Conference on Software Paradigm Trends
104
4.4 Procedure to Obtain Modules
From the cohesion criterion and the Module Sparsity
Lemma, we finally formulate the necessary
procedure to deal with outliers of a given software
system through Laplacian Matrices. The procedure
pseudo-code is shown in the next box.
The above procedure obtains module sizes. The
saved list of erased edges corresponds to the outliers.
These point out to residual couplings to be solved.
5 CASE STUDIES
We describe two case studies that have been
examined during our research. The first case study is
the Observer Pattern, a canonical system. The
second case study is an abstract software system
illustrating how to deal with an outlier.
5.1 The Observer Pattern: Modularity
Matrix and Bipartite Graph
The Observer software design pattern, is defined in
the GoF book (Gamma et al., 1995). Its purpose is a
many-following-one behavior. This case study
enables comparison with our preceding spectral
paper (Exman, 2015) in which the same pattern
illustrated the approach based upon the Modularity
Matrix symmetrized and weighted by an Affinity.
The Observer structors are (abstract/concrete)
subject and observer, (analog/digital) clock
application GUI (Graphical User Interface), a
subject resource (the internal clock) and an initiator
to construct objects. The pattern functionals include
the clock application Display “digital” and “analog”.
The Observer Modularity Matrix in Fig. 6 is a
standard strictly block-diagonal Matrix for Design
Patterns. This is justified as a canonical system, i.e.
patterns that were designed for reuse, based on wide
applicability. The upper left block is the subject. The
middle block is the observer. The lower right blocks
refer to application specific GUI and the initiator.
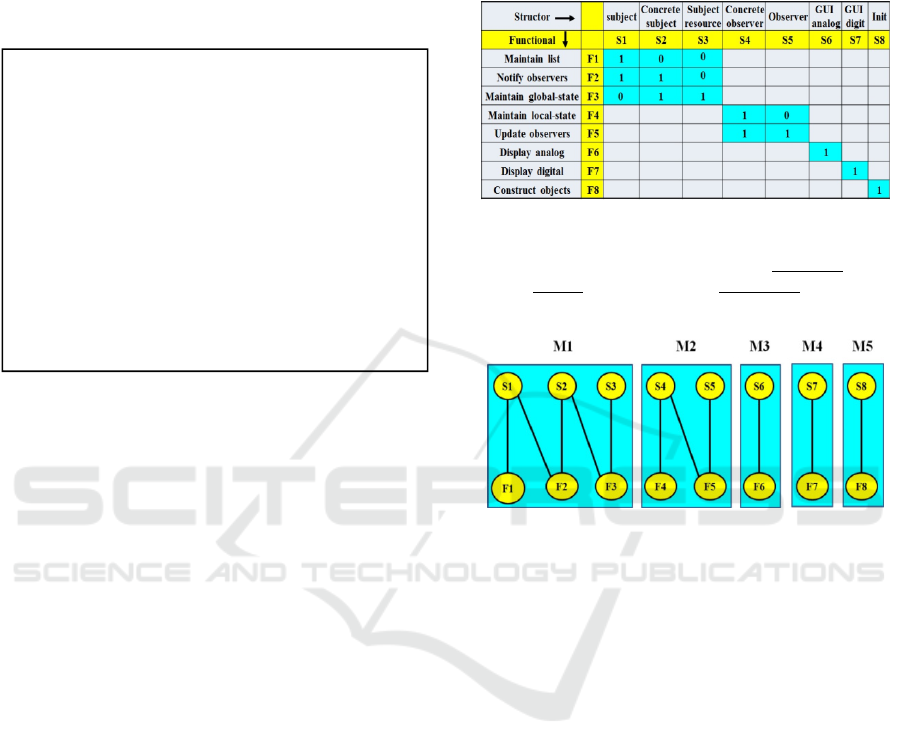
Figure 6: Observer Design Pattern Modularity Matrix.
There are 8 structors and functionals in this matrix. These
form 5 modules (in blue background): a- upper-left subject
role; b- middle observer role; c- lower-right three strictly
diagonal modules: specific application GUIs and initiator.
Figure 7: Observer Bipartite Graph – The graph is
obtained from the Modularity Matrix in Fig. 6. It has five
modules, precisely fitting diagonal blocks in the Matrix,
also highlighted by the light blue background.
Figure 7 shows the undirected Bipartite Graph –
structor vertices
Sj are connected only to functional
vertices
Fi, and not among themselves. It is obtained
from the Observer Modularity Matrix in Fig. 6.
Structors with two 1-valued elements in a column –
say S2 – originate two edges. Similarly functionals –
say F5 – with two 1-valued elements in a row.
5.2 The Observer Pattern: Laplacian
Matrix and Eigenvectors
We use the Observer Bipartite Graph in Fig. 7 to
generate the Observer symmetric Laplacian Matrix.
The number of connected components is given
by the number of zero-valued Laplacian eigenvalues.
Sizes of the observer modules, the connected
components, are given by the respective
eigenvectors in Fig. 9, with functionals and structors
as follows: a- F1+S1+F2+S2+F3+S3; b-
F4+S4+F5+S5; c- F6+S6; d- F7+S7; e- F8+S8.
Design Procedure 1: Obtain Module Sizes
Set Maximal-Sparsity-Threshold;
Set Modules-Sparsity = 0;
Obtain Bipartite-Graph of Software System;
While
(Modules-Sparsity > Maximal-Sparsity-Threshold) do
{ Obtain Laplacian Matrix from Bipartite Graph;
Calculate Laplacian eigenvectors/eigenvalues;
Get eigenvectors with 0-valued eigenvalues;
Obtain Modules from these eigenvectors;
Calculate Modules-Sparsity;
If (Modules-Sparsity > Threshold)
Split Module: erase edge of Bipartite-Graph;
Save list of erased ed
g
es
;
}
Linear Software Models: Modularity Analysis by the Laplacian Matrix
105
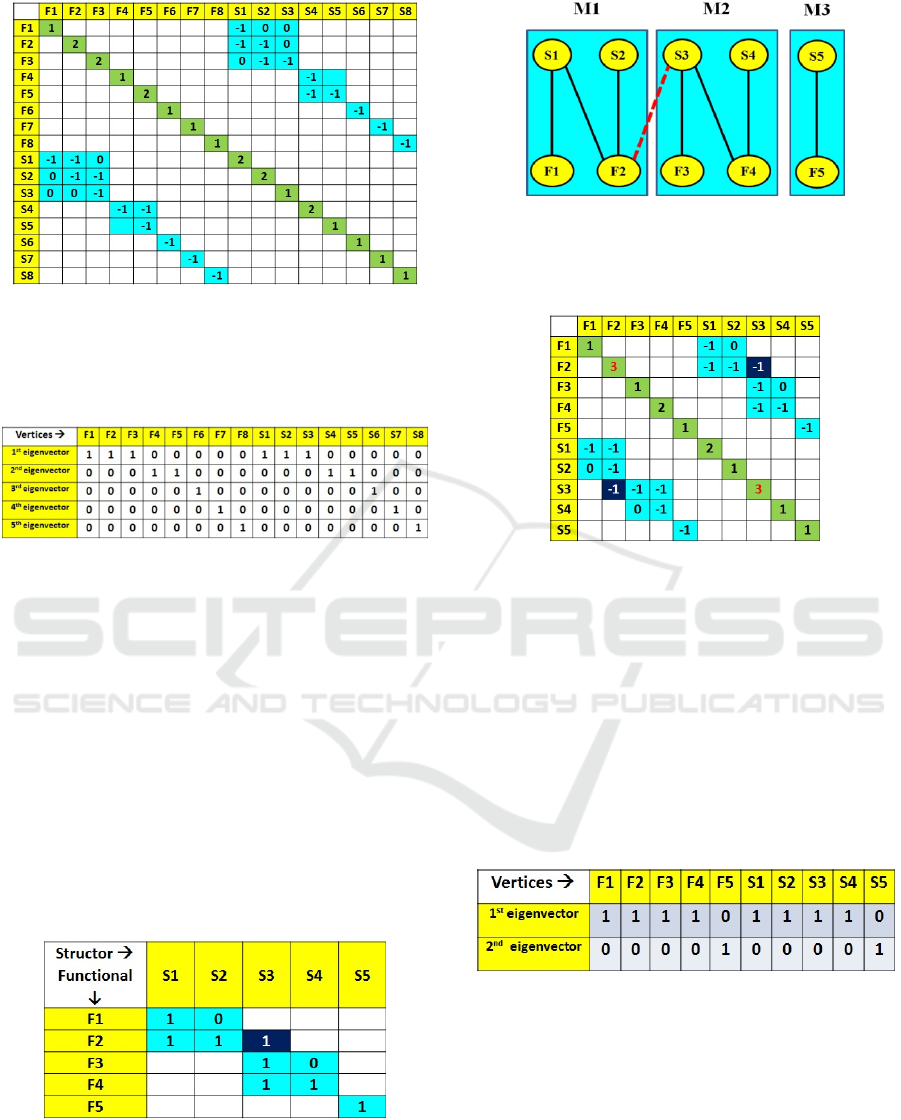
Figure 8: Observer Laplacian Matrix – Laplacian rows and
columns are labelled with all the graph vertices of Fig. 7.
Adjacency values in the top-right quadrant are identical to
the Modularity Matrix and also reflected in the bottom-left
quadrant. Degree values appear in the Laplacian diagonal.
Figure 9: Observer Laplacian Eigenvectors – These are 5
eigenvectors corresponding to 5 zero-valued eigenvalues.
5.3 Abstract System with Outlier:
Modularity Matrix and Bipartite
Graph
The second case study is an abstract system with
unnamed structors and functionals. An outlier
element was added to the Modularity Matrix,
coupling two modules. We follow Design Procedure
1 in section 4.4 to find the modules and the outlier.
The abstract system Modularity Matrix in Fig. 10
has 3 modules and an added outlier, a 1-valued
matrix element outside the modules. Its undirected
Bipartite Graph is shown in Fig. 11.
Figure 10: Abstract System with Outlier Modularity
Matrix – The matrix has 3 modules (light blue filled). An
added outlier in row F2, column S3, (dark blue
background), couples the top-left and middle modules.
Figure 11: Abstract System with Outlier Bipartite Graph –
There are 3 modules (light blue background). The outlier
is represented by a dashed (red) line linking the vertex S3
to vertex F2, thereby coupling M1 with the M2 module.
Figure 12: Abstract System with Outlier Laplacian Matrix
– The outlier is represented by a dark (blue background) in
the Adjacency values, and by (red) 3 degree digits.
5.4 Abstract System with Outlier:
Laplacian Matrix and Eigenvectors
The Laplacian of the abstract system, shown in Fig.
12, is obtained from the undirected Bipartite Graph.
Eigenvectors fitting zero-valued eigenvalues, in
Fig. 13, are just two: a- a module of size 4, obtained
from the top-left and middle modules coupled by the
outlier; b- another of size 1, in the bottom-right.
Figure 13: Abstract System with Outlier eigenvectors –
There are just 2 modules. In the 1
st
eigenvector the outlier
couples two modules of size 2 into a larger module with 4
structors and 4 functionals.
By Design Procedure 1 in section 4.4, we
calculate the modules’ Sparsity. The bigger module
has 4 Structors (S1, S2, S3, S4) by the 1
st
eigenvector, due to the “outlier” connection seen in
Fig. 11. By Lemma 3 in section 4.3, one obtains:
Sparsity = 1 – (7/16) = 0.56
ICSOFT-PT 2016 - 11th International Conference on Software Paradigm Trends
106

Assuming a reasonable Maximal-Sparsity-Threshold
of 0.5 – i.e. the internal Sparsity of a module should
be low, meaning high Cohesion – the bigger module
is thus inferred to have an outlier.
We next erase an edge linking vertices S3 to F2
of the Bipartite Graph to split the module with too
big Sparsity. The new eigenvectors are in Fig. 14.
Figure 14: Abstract System without Outlier eigenvectors –
There are now three modules.
Recalculated Sparsity shows that the split
modules have high Cohesion. But erasing the edge
from S1 to F2, instead of the dashed “outlier” edge
from S3 to F2 in the Bipartite Graph in Fig. 11,
would also have reduced the Sparsity of the resulting
modules. Thus, the outlier resolution may not be
unique in algebraic terms. The software engineer
may need to apply semantic knowledge about
software components, to resolve couplings.
6 DISCUSSION
This work extended the formal meaning of software
system modules adding a new criterion, Connected
Components. One perceives that it appears in all
Linear Software Models’ representations of software
systems (Modularity Matrix, Modularity Lattice,
Bipartite Graph, Laplacian Matrix).
6.1 Evaluating Spectral Approaches
This work uses Laplacian eigenvectors fitting its
zero-valued eigenvalues to obtain number and sizes
of modules. Eigenvectors and eigenvalues were
calculated with the JAMA library (JAMA, 2016).
Previously (Exman, 2015) we used eigenvectors
of the Modularity Matrix symmetrized and weighted
by an affinity. The same results were obtained by
both approaches. They differ mainly by efficiency.
While Modularity Matrix weighting demands an
affinity definition, the Laplacian is neatly defined. A
Modularity Matrix advantage is its smaller size, just
one fourth of the corresponding Laplacian.
Ongoing research investigates the Laplacian
approach to larger software systems containing
outliers coupling diagonal blocks. We intend to
further formalize outliers’ treatment by the Fiedler
vector (Fiedler, 1973). This will better evaluate the
Laplacian approach for realistic systems design.
6.2 Main Contribution
This work shows that different spectral approaches
produce the same numbers and sizes of software
system modules. Behind diverse techniques, there is
just one single basic algebraic theory of software
system composition, viz. Linear Software Models.
REFERENCES
Baldwin, C.Y. and Clark, K.B., 2000. Design Rules, Vol.
I. The Power of Modularity, MIT Press, MA, USA.
Cai, Y. and Sullivan, K.J., 2006. Modularity Analysis of
Logical Design Models, in Proc. 21
st
IEEE/ACM Int.
Conf. Automated Software Eng. ASE’06, pp. 91-102,
Tokyo, Japan.
Exman, I., 2012. Linear Software Models, Extended
Abstract, in I. Jacobson, M. Goedicke and P. Johnson
(eds.), GTSE 2012, SEMAT Workshop on General
Theory of Software Engineering, pp. 23-24, KTH
Royal Institute of Technology, Stockholm, Sweden.
Video site:
http://www.youtube.com/watch?v=EJfzArH8-ls
Exman, I., 2013. Linear Software Models are Theoretical
Standards of Modularity, in J. Cordeiro, S.
Hammoudi, and M. van Sinderen (eds.): ICSOFT
2012, Revised selected papers, CCIS, Vol. 411, pp.
203–217, Springer-Verlag, Berlin, Germany. DOI:
10.1007/978-3-642-45404-2_14
Exman, I., 2014. Linear Software Models: Standard
Modularity Highlights Residual Coupling, Int. Journal
on Software Engineering and Knowledge Engineering,
vol. 24, pp. 183-210, March 2014. DOI:
10.1142/S0218194014500089
Exman, I., 2015. Linear Software Models: Decoupled
Modules from Modularity Eigenvectors, Int. Journal
on Software Engineering and Knowledge Engineering,
vol. 25, pp. 1395-1426, October 2015. DOI:
10.1142/S0218194015500308
Fall, K., in Focus: Perspectives-US, 2016. “Four Thought
Leaders on Where the Industry is Headed”, IEEE
Software, pp. 36-39.
Fiedler, M., 1973. “Algebraic Connectivity of Graphs”,
Czech. Math. J., Vol. 23, (2) 298-305 (1973).
Gamma, E., Helm, R., Johnson, R. and Vlissides, J., 1995.
Design Patterns: Elements of Reusable Object-
Oriented Software, Addison-Wesley, Boston, MA.
JAMA, 2016. Java Matrix Package, web site:
http://math.nist.gov/javanumerics/jama/
Merris, R., 1994. "Laplacian matrices of graphs: a survey",
Linear Algebra and its Applications, Vols. 197-198,
January-February, pp. 143-176. DOI: 10.1016/0024-
3795(94)90486-3.
Ng, A.Y., Jordan, M.I., and Weiss, Y., 2001. On spectral
Linear Software Models: Modularity Analysis by the Laplacian Matrix
107

clustering: analysis and an algorithm, in: Proc. 2001
Neural Information Processing Systems, pp.849–856.
Prototype, 2016. Web site: http://www.tutorialspoint.com/
design_pattern/prototype_pattern.htm
Shokoufandeh, A., Mancoridis, S., Denton, T. and
Maycock, M., 2005. “Spectral and meta-heuristic
algorithms for software clustering,” Journal of
Systems and Software, vol. 77, no. 3, pp. 213–223.
Shtern, M. and Tzerpos, V., 2012. Clustering
Methodologies for Software Engineering, in Advances
in Software Engineering, vol. 2012, Article ID 792024
(2012). DOI: 10.1155/2012/792024
Siff, M. and Reps, T., 1999. Identifying modules via
concept analysis, IEEE Trans. Software Engineering,
Vol. 25, (6), pp. 749-768. DOI: 10.1109/32.824377
von Luxburg, U., 2007. A Tutorial on Spectral Clustering,
Statistics and Computing, 17 (4), pp. 395-416. DOI:
10.1007/s11222-007-9033-z
Wille, R., 1982. Restructuring lattice theory: an approach
based on hierarchies of concepts. In: I. Rival (ed.):
Ordered Sets, pp. 445–470, Reidel, Dordrecht,
Holland.
ICSOFT-PT 2016 - 11th International Conference on Software Paradigm Trends
108
