
Vision System of Facial Robot SHFR- III for Human-robot
Interaction
Xianxin Ke, Yujiao Zhu, Yang Yang, Jizhong Xing and Zhitong Luo
Department of mechanical and electrical engineering, Shanghai University, NO.149 Yanchang Raod, Shanghai, China
Keywords: Facial Expression Robot, Visual System, Human-robot Interaction.
Abstract: The improvement of human-robot interaction is an inevitable trend for the development of robots. Vision is
an important way for a robot to get the information from outside. Binocular vision model is set up on the
facial expression robot SHFR- III, this paper develops a visual system for human-robot interaction,
including face detection, face location, gender recognition, facial expression recognition and reproduction.
The experimental results show that the vision system can conduct accurate and stable interaction, and the
robot can carry out human-robot interaction.
1 INTRODUCTION
The population aging is more and more serious in
today's society, housekeeping and family nursing in
the family are more and more demand for the robot.
If robots can naturally communicate with people and
express feelings at work, they will be better to help
people in the psychological and physiological.
Psychologists’ studies show that only 7% of
information is transferred by spoken language, while
38% is expressed by paralanguage and 55% is
transferred by facial expressions. It can be seen that,
facial expression robot continue to enter the people's
lives, which will be an inevitable trend.
Based on the static or dynamic human face
image, the robot can determine the relative position
of them, which will be widely used in the future.
The robot can control the robot's position and select
the appropriate address and different communication
methods, according to the information of the
position, the expression and the gender. The visual
research can provide personalized human-robot
interaction mode for the robot, which is helpful to
build complex and intelligent human-robot
interaction system.
With the improvement of the humanoid robot
human-robot interaction attention, more and more
organizations begin to participate in them. Foreign
studies carried out earlier, the early classic is infant
Kismet robot of MIT(Massachusetts Institute of
technology) that can be a natural and intuitive
interaction, whose vision system are consist of face
detection, motion detection and skin colour
detection. KOBIAN-RII (Trovato et al., 2012), a
relatively mature research by the Waseda University
in Japan, can achieve dynamic emotional expression.
And Italy's programmable humanoid robot iCub
(Parmiggiani et al., 2012), mainly used for children's
cognitive process.
Based on the facial robot SHFR- III, this paper
develop visual system of robot, including face
detection, face location, gender recognition, facial
expression recognition and reproduction, which have
great significance for the further development of
human-robot interaction system.
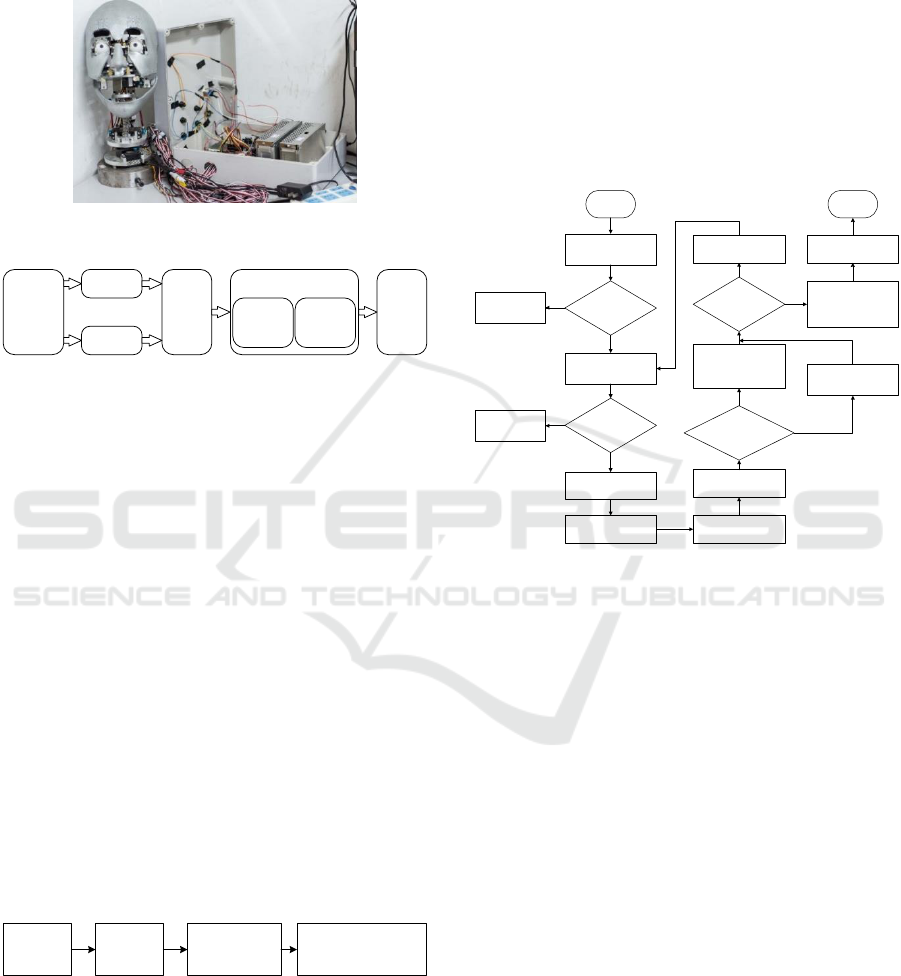
2 FACIAL ROBOT SHFR- III
The platform is the facial robot SHFR- III. The
robot's head is divided into four parts: the eyebrows
mechanism, the eye mechanism, the jaw mechanism,
the neck mechanism. It have 22 degrees of freedom,
and each degree of freedom is controlled by a
steering gear. PC sends a command to down-bit
machine FPGA via serial communication. After
getting instruction information the next crew sent
PWN signal to the steering engine, and then the
steering engine control rotation Robot expression.
Face robot head and control box as shown in Fig. 1.
The binocular vision model of facial robot
consists of two parts: hardware and software. The
software is composed of the host computer vision
processing algorithm, the target location algorithm
472
Ke, X., Zhu, Y., Yang, Y., Xin, J. and Luo, Z.
Vision System of Facial Robot SHFR- III for Human-robot Interaction.
DOI: 10.5220/0005994804720478
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 472-478
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
and the gender expression recognition algorithm.
Hardware system includes image sensor, image
acquisition card and PC, the system block diagram is
shown in Fig. 2
Figure 1: Facial Robot SHFR- III platform.
Figure 2: Binocular system diagram.
The head of the robot vision system is of two
micro cameras installed in the eye model, camera
resolution is 1280╳960, refresh rate is 50f/s.
The video capture card is used to transform the
analogue signals obtained by the vision sensor into
digital image data. In order to facilitate the
development of the system on the mobile platform,
we chosen TC-U652 video capture card with USB
interface.
3 VISUAL SYSTEM
In this paper, the visual system can realize face
detection, face location, gender recognition system
and facial expression recognition and representation,
which provides a comprehensive information for
human-robot interaction, as shown in Fig.3. This
paper use OpenCV as main development platform,
programming with C + + language. We also use the
QtCreator3.0.0, Qt5.2.0 and MSVC2010
Figure 3: Visual system.
3.1 Face Detection
This paper adopt a face detection algorithm based on
Haar features of the cascade classifier. The process
is shown in Fig.4.
The operation will be initialized and the camera
will be called by OpenCV to achieve image
acquisition.
Then, the system will judge the status of
camera. If the camera cannot be open, it will display
error and exit the program. On the contrary, the
binocular cameras open normally, each camera reads
an image and determine whether it is empty, if the
image data is empty, the system will display error
and exit the program.
Figure 4: Face detection process.
After the image is read, the image need to be
processed in order to improve the recognition rate of
the classifier, including image grizzled, brightness
equalization and smooth processing.
It use defined cascade classifier for face
detection that based on Haar-like features (Peleshko
and Soroka, 2013; Quanlong et al., 2014; Lienhart
and Maydt, 2002) after the pre-treatment of the
image. The image Detected is shown in Fig.5 (a).
Further processing is needed for practical
applications. After realizing the face detection, we
also design the program of the facial feature
detection and location, including the eyes, nose and
mouth, which have important significance to
improve the accuracy of face detection. The trained
classifier Haarcascade_eye.xml,
Haarcascade_mcs_nose.xml and
Haarcascade_mcs_mouth.xml are respectively
detected eyes, nose and mouth, which will be
marked with boxes of different sizes, as shown in
Fig. 5 (b).
Start
Program
initialization
Capture image
Is the
camera normal-
ly open?
Converted to
grayscale
Output
error
Is the image
empty?
Output
error
Image brightness
equalization
Image Smoothing
Face Detection
Is
there a face?
Storage
position of the
face
Display "no
face"
Continue
to test?
Wait 50ms
End
Facial feature
detection and
location
N
Y
Y
N
N
Y
Y
N
Turn off the
camera
Face
Detection
Face
Location
Gender
Recognition
Facial expression
recognition and
reproduction
Outside
scenarios
Left eye
camera
Right eye
camera
The USB
video
acquisi
tion
card
Intera-
ctive
objects
PC
Image
Processin
g System
HMI
system
Vision System of Facial Robot SHFR- III for Human-robot Interaction
473

(a) Only detect human face
(b) Detect human face and
face features such as eyes,
nose and mouth
Figure 5: Face detection stage results.
The output of this paper is the variable size of the
face image that can vary with the distance between
face and the camera, which is different with the
detected face images of the traditional output.
After the end of the test, it shows the
recognition results. If we have the need, the system
will get the next frame image and repeat the
recognition process. This section must be in one
column.
3.2 Facial Location
The face localization is the relative position between
the robot and the target, and the relationship between
the relative position and the parameters of the
camera can be determined by establishing the
binocular vision model. Internal parameters are
obtained using MATLAB and self-calibration
method.
Robot camera is the wide-angle lens. The focal
length is small, which be generally within 30mm,
and binocular vision system position in the larger
scene. The subject and the distance between the
camera is much larger than 30mm, that is, u >> f, so,
11
=
vf
(1)
where u is object distance, v is image distance, f is
focal distance.
Because of v≈f, the camera lens system can still
use small aperture imaging model. Through the
transformation between physical
coordinates
of image coordinate system
and camera coordinate system
, the
relationship can be established between the pixel (u,
v) of image coordinate system and world coordinate
system coordinates
, as follows:
0
0 1 2
u 0 u 0
v = 0 v 0
1
1
0 0 1 0
1 1 1
w w w
x
w w w
y
T
w w w
x x x
f
y y y
s f M M M
z z z
Rt
0
(2)
where s represents
,
and
are focal length in
pixels, R is a rotation matrix, t is a translation vector,
M is called the camera parameter matrix, M1 matrix
is only related to the intrinsic parameters of the
camera. It is the camera parameter matrix. The M2
matrix describes the position and orientation of the
camera in the world coordinate system. It is the
external parameter matrix.
The physical and geometric model of the robot
binocular vision system is shown in Fig.6. The left
and right eyes of the camera coordinate system use
the optical centre as the origin respectively, the
world coordinate system is located in the middle.
Three coordinate system parallel to each other.
The focus length of left and right eyes are
respectively (
) and (
), eyes spacing
2B. The optical centre coordinates are respectively
(
) and (
), the distance between the
two eyes is 2B.
Figure 6: Binocular system and geometric model of facial
robot.
The method of parallel to the optical axis
orientation is used in this paper. The model of left
and right eye camera and focal length are
approximately the same, but the photo centric
coordinates will make a difference due to assembly
and manufacturing error. We can approximate that:
1 1 2 2y x y x
f f f f f
(3)
According to the above formula:
1 2 1 2
11
11
2
w
uu
u
ww
v
ww
Bf
z
c c u u
uc
x z B
f
vc
yz
f
(4)
The formula is the corresponding relationship of
a little space point between the pixel coordinates and
physical coordinates.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
474

The traditional camera calibration method of grid
calibration board is used in this paper, and the
camera calibration is carried out by means of
MATLAB toolbox. But because the camera
calibration result is affected by the size of the
calibration board, the size of the grid, the position of
the display and different light, the results may be
volatile. In camera calibration, compared with the
focal length, the changes of parameter have greater
influence to the optical centre coordinates. The
overall image resolution is only 640 *480, the light
fluctuation is too large and even unable to meet the
needs of target positioning. We choose self-
calibration method to calibrate the camera optical
centre coordinates.
We came to the conclusion about the eye-
parameter matrix, respectively:
1L
938 0 381 418
M 0 938 218 224
0 0 1 0
(5)
1R
953 0 328 330
M 0 950 177 260
0 0 1 0
(6)
3.3 Gender Identification
Gender classification is a typical two classification
problem. The recognition process is divided into the
following stages: image pre-processing, facial
gender feature extraction and recognition analysis.
Gender recognition based on face is mainly analysed
by facial features, and then through the algorithm
gender characteristics of the face are classified.
On the basis of face image pre-processing,
gender recognition system is further designed, the
program flow diagram as shown in Fig.7, mainly
including PCA feature extraction and LDA
classification.
Figure 7: Gender Recognition System program flow chart.
In this paper, we choose the most widely used
PCA to extract the gender characteristics of human
face images, which extract the gender characteristics
mainly, while reducing other information. The
essence of PCA is to transform the original feature
into the low latitude space in the case of the best
possible representation of the source feature.
Then the classifier is designed by LDA for
gender identification, which can extract the most
discriminative low-dimensional feature from the
high dimensional feature, and select the
characteristics that reflect the maximum ratio of the
samples between class dispersion and intra-class
dispersion.
3.4 Facial Expression Recognition and
Reproduction
The facial expression recognition and representation
system is divided into four parts, including the pre-
processing of the input image, feature extraction and
dimensionality reduction of the processed image, the
stage of facial expression recognition, the
reproduction of facial expression recognition.
On the basis of image pre-treatment, the facial
expression recognition system is further designed,
and the flow chart is shown in Fig.8.
Figure 8: The system of facial expression recognition and
reproduction.
In the system of facial expression recognition
and representation, feature extraction is the key of
the recognition technology. The effective method of
extracting facial features will directly affect the level
of recognition rate. In this paper, Gabor wavelet is
used to extract facial expression features. Therefore,
the case has been effectively improved with
reducing Feature dimension feature reduction and
preserving the important feature. For this purpose,
PCA is used to reduce the dimension of the feature
extracted by Gabor.
A classifier based on SVM is used for facial
expression recognition, the method of SVM
Read the training
images and labels
PCA feature
extraction
Train LDA and
save model
Read the face image
PCA feature
extraction
Gender Recognition
Load training model
Read the training
images and labels
Gabor feature
extraction
PCA feature
reduction
Train SVM , save
model
Read facial image
to be recognized
Gabor feature
extraction
PCA feature
reduction
Facial Expression
Recognition
Expression
reproduction
Load training
model
Serial
communication
Vision System of Facial Robot SHFR- III for Human-robot Interaction
475
expression classification is the linear kernel
function.
After identifying the expression, the PC sends
instructions to the next bit machine through the
serial communication and controls the robot to
reproduce the expression.
4 EXPERIMENTAL
EVALUATION
In this paper, the experiment is carried out on the
platform of the vision system of humanoid head
robot.
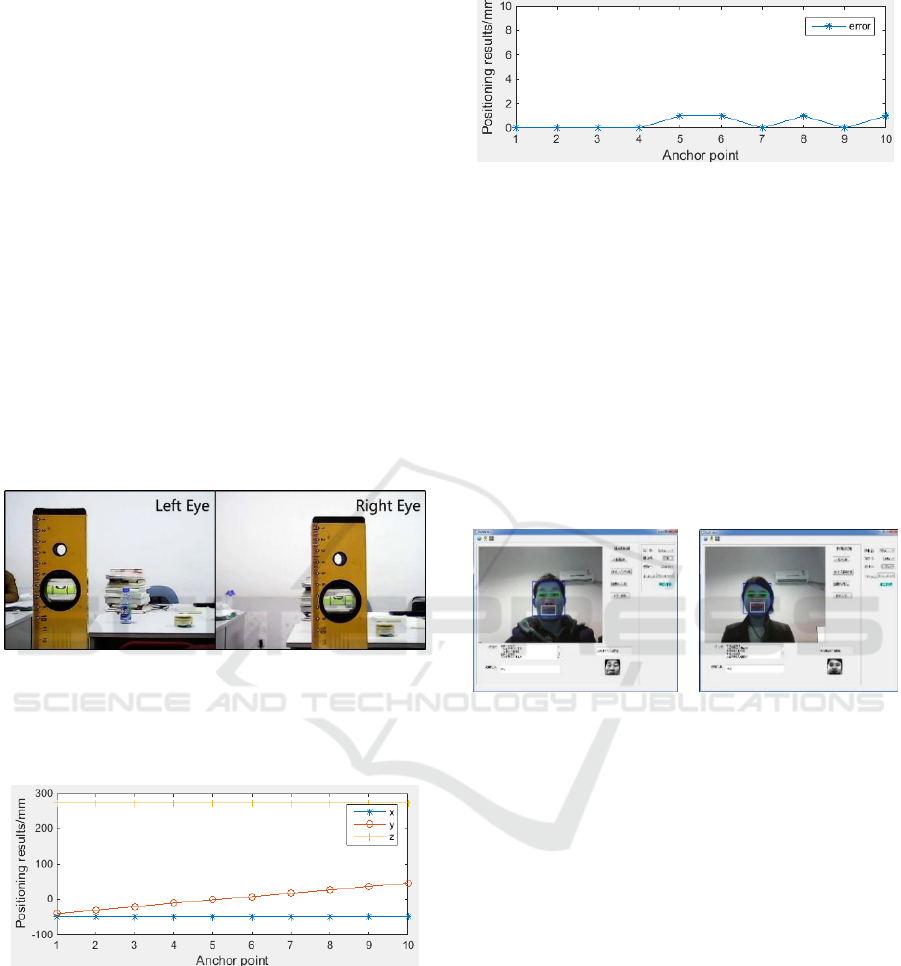
First of all, the accuracy of face location is
verified, and the calibration line is positioned on the
scale. The positioning results are compared with the
calibration results and the positioning accuracy is
measured. The vertical positioning experiment is
shown in fig.9.
Figure 9: Vertical equidistant points Positioning
Experiment.
The results of vertical equidistant points
experimental are shown in Figure 10.
Figure 10: The results of vertical equidistant points.
From the figure, the results of X, Z axis positioning
in ten measurement point are the same, the X axis
distance has been -49mm, Z axis has been 273mm,
which consistent with the actual value. The results of
Y axis increase with the positioning point. The main
error are on the Y axis and the positioning error are
between 0-1mm, the error curve as shown in Fig.11.
Figure 11: The error of vertical positioning
In the same way, the horizontal isometric point
experiment is carried out. The main error is
concentrated on the X axis that is in 0-3mm, and the
error is between 0mm to 3mm.
Experiments show that the face localization can
be successfully tested, and the accuracy and stability
are great.
FERET (Phillips et al., 1998) face database is
selected for the establishment of gender
identification system, gender recognition
experimental results shown in Figure 12.
Experiments show that the robot can accurately
identify the gender.
(a) Result: male
(b) Result: female
Figure 12: Gender recognition experiments.
CK+ (Lucey et al., 2010) facial expression
database is selected for the establishment of facial
expression recognition and reproduction system. The
experimental results of facial expression recognition
and representation are shown in Figure 13.
Apart from this, there are five other basic facial
expression, which can show the realization of facial
expression recognition and reproduction system. In
addition to the six basic facial expressions, the
system can also achieve the other four special
expression, interest, arrogant, guilt and cachinnation.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
476

(a) Identified surprised expression
(b) Reproducing
surprised expression
Figure 13: Expression recognition and reproduction
experiments.
In terms of human emotional interaction,
emotional information is obtained through the direct
or indirect contact with human beings. Emotional
information is analysed and identified by modelling.
Perceptual understanding can be obtained by
reasoning the results. Finally, the results can be
expressed through the appropriate way, it completed
the whole process of emotional interaction. The
experiments are shown in fig.14.
Robot expression is happiness on face image
recognition. If recognition is male and the
expression is sad, the robot will become surprised,
finally turn to sad; if the recognition is female and
the expression is sad, the facial expression robot will
become interested, then turn to guilty, such as shown
in Fig.14.(a).
(a) The human-robot interaction process of the same expression
for different gender when the initial expression is happiness
(b) The human-robot interaction process of the same expression
for different gender when the initial expression is sadness
Figure 14: Human-robot interaction experiments.
Robot expression is sadness on face image
recognition. If recognition is male and the
expression is happy, the robot will become angry
and finally turn to disgust; if the recognition is
female and the expression is happy, the facial
expression robot will become interested and
eventually become happy, as shown in Fig.14 (b).
It can be seen in the figure that, for the same kind
of expression of different gender, the robot's
emotional change is not the same. The robot can
make a harmonious human-robot interaction through
vision.
5 CONCLUSIONS
This paper developed the vision system based on the
SHFR- III facial expression robot, including face
detection, face location, gender recognition and face
recognition and representation, which are used for
human-robot interaction. The results of experiments
show that robot can successfully detect human face
and locate face position accurately. It is able to
identify 6 basic facial expressions and the machine
can reproduce the expressions. Other special facial
expressions can be achieved through the head-neck
coordination. It also can correctly identify the
Vision System of Facial Robot SHFR- III for Human-robot Interaction
477

gender of the recognized face image. By making a
certain response to the detected face information,
human-robot interaction can be achieved.
The future work is focused on the establishment
of an emotional model for the facial robot SHFR-
III, which is a robot with richer artificial
intelligence.
ACKNOWLEDGEMENTS
This research is supported by National Key
Scientific Instrument and Equipment Development
Projects of China (2012YQ150087), National
Natural Science Foundation of China (61273325).
REFERENCES
Delaunay F, Greeff D J, M. Belpaeme T, 2009, Towards
retro-projected robot faces: An alternative to
mechatronic and android faces, The 18th IEEE
International Symposium on Robot and Human
Interactive Communication, Toyama, pp. 306-311.
G. Trovato, T. Kishi, N. Endo et al, 2012, Development of
facial expressions generator for emotion expressive
humanoid robot, 2012 12th IEEE-RAS International
Conference on Humanoid Robots, pp.303-308.
Alberto Parmiggiani, Giorgio Metta, Nikos Tsagarakis,
2012, The mechatronic design of the new legs of the
iCub robot, IEEE-RAS International Conference on
Humanoid Robots,Japan, pp.481-486.
Peleshko D,Soroka K, 2013, Research of Usage of Haar-
like Features and AdaBoost Algorithm in Viola-Jones
Method of Object Detection, International Conference
on the Experience of Designing and Application of
CAD Systems in Microelectronics (CADSM), pp.284-
286.
Quanlong Li, Qing Yang, Shaoen Wu, 2014, Multi-bit
sensing based target localization (MSTL) algorithm in
wireless sensor networks, 2014 23rd International
Conference on Computer Communication and
Networks (ICCCN). Shanghai. pp.1-7.
Lienhart R, Maydt J, 2002, An extended set of Haar-like
features for rapid object detection, 2002 International
Conference on Image Processing, pp.900-903.
Yunsheng Han, Mobile Robot Positioning Target Object
Based on Binocular, Jiangnan University.
Ekman P, Rosenberg E L, 2005, What the face reveals:
basic and applied studies of spontaneous expression
using the Facial Action Coding System (FACS),”
Second Edition. Stock: Oxford University Press.
Lucey P, Cohn J F, Kanade T, et al, 2010, The extended
Cohn-Kanade dataset (CK+): A complete facial
expression dataset for action unit and emotion-
specified expression Proceedings of the Third
International Workshop on CVPR for Human
Communicative Behavior Analysis, pp.94-101.
Phillips P J, Wechsler H, Huang J, et al, 1998,The FERET
database and evaluation procedure for face recognition
algorithm, Image and Vision Computing, pp.295-306.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
478
