
Lessons from the MOnarCH Project
Jo
˜
ao Silva Sequeira
1
and Isabel Aldinhas Ferreira
2
1
IST/ISR, Universidade de Lisboa, Lisbon, Portugal
2
Centro de Filosofia da Universidade de Lisboa, Universidade de Lisboa, Lisbon, Portugal
Keywords:
Human-Robot Interaction, Social Robotics.
Abstract:
The paper describes the main conclusions issued from three years of development, of which approximately
eighteen months of observations, of an autonomous social robot interacting with children and adults in the
Pediatrics ward of an Oncological hospital. After this long period of trials and continuous interaction, the
integration of the robot in that particular social environment can be considered highly successful. The results
taken from all the long run experiments yield valuable lessons in what relates social acceptance and user
experience to be considered in the case of robot deployment at institutions or even at households. These are
detailed in the paper.
1 INTRODUCTION
The main goal of the MOnarCH project
1
is to test the
integration of robots in a social environment, assess-
ing the relationships established between humans and
robots and identifying guidelines for developments to
be incorporated in future social robots.
The project is evolving in the Pediatrics ward on
an Oncological hospital
2
where the robot engages
in edutainment activities with the inpatient children.
Though this environment poses no special difficulties
on the locomotion of a wheeled robot, it can be chal-
lenging in what concerns obstacle avoidance as the in-
habitant children can use the space of the ward to play
with bulky toys and tend to be naturally entropic.
The robot is shown in Figure 1. It is about the
height of an 8-10 year old child, capable of omnidi-
rectional motion with linear velocities up to 2.5 m/s,
thus capable to walk along a person at fast pace. The
volume of the robot is compatible to that of a child
companion.
There are a number of factors difficult to quan-
tize when dealing with inpatient children. Nowa-
days there is a wide variety of toy robots commer-
cially available, some with sophisticated interfacing
skills. Nevertheless, the great majority of children
had never been close to a robot this size. Even though
many of them already know what a robot is and have
clear prototypical images of a robot (see (Sequeira
1
www.monarch-fp7.eu
2
IPOLFG, in Lisbon.
Figure 1: The MOnarCH robot (source: SIC TV Network).
and Ferreira, 2014)) this is a perception obtained from
movies, books, toys, etc. At the hospital it has been
observed that children often show surprise when they
see the robot for the first time moving autonomously.
This initial perception may have a lasting effect and
influence future behaviors (see for instance (Boden,
2014)).
This paper does not report results supported on
rigid observation methodologies as often used in the
literature, with Likert questionnaires and statistical
processing of the results (preliminary analysis can be
found in project MOnarCH Deliverables, (MOnarCH
Project Consortium, 2015; MOnarCH Project Con-
Sequeira, J. and Ferreira, I.
Lessons from the MOnarCH Project.
DOI: 10.5220/0005998102410248
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 1, pages 241-248
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
241

sortium, 2016)). The main reason is that such ap-
proach can disturb the normal operation of the envi-
ronment (the Pediatrics ward in this case) and bias
any results (the argument in (Boden, 2014) on the im-
portance of initial perceptions can also be used here).
Instead, the paper is supported on direct observations
of all the actors in the environment. The paper’s con-
clusions are grounded on almost 18 months of intense
observation of the reactions of children and adults at
the hospital with the robot evolving through different
stages of development. In a sense, it can be assumed
that multiple inpatient children with essentially simi-
lar social behaviors were interacting, directly and in-
directly, with the robot. This number is estimated in
the order of hundreds. Therefore the number of chil-
dren that knew about the robot is large enough for the
observations to have some significance.
We claim that social experiments involving robots
must unfold with the dynamics of the social environ-
ment itself. Otherwise there is a risk of biasing the re-
sults. Rigid planning of experiments, as often done in
lab environments often cannot be used. In fact, while
preparing an experiment a team is changing the en-
vironment and potentially biasing the reaction of the
inhabitants.
The paper is organized as a collection of the main
lessons learned, one per section, without any rank-
ing concerns. All the lessons are equally important.
Even though some of these lessons are well known of
Robotics developers, it is worth to recall them. More-
over, these lessons are not intended to be a method-
ological approach to project development.
2 DESIGNING THE
EXPERIMENTS
The hospital environment is socially constrained often
to a high degree. Besides the ethical and legal regula-
tions, there are a large number of unwritten rules (the
social rules) the robot should comply with to maxi-
mize the acceptance by the inhabitants of the social
environment, i.e., children, parents, relatives and vis-
itors, and staff. Moreover, some of these rules may
change in time depending, for example, on the occu-
pancy of the ward.
The routines of the hospital cannot be disturbed at
any time and even though the robot is constantly un-
der development, experiments must occur only when
the adequate conditions in the social environment
emerge. This means that seldom the experiments can
be planned. Instead, the robot must match its capabil-
ities to the current state of the environment and gener-
ate observations from which relevant conclusions can
be withdrawn. In a sense, experiments must occur as
the (uncontrolled) events arise. This randomness al-
lowed nonetheless a rough scheduling for classes of
experiments.
The robot design followed principles also recom-
mended by other authors, (see for example (Kim,
2007)) namely that of using test frameworks and en-
sure that the project team have a thorough understand-
ing of the HRI interfaces, of the environment, and of
the influence of design aspects. In MOnarCH, besides
the testing in the hospital, numerous tests of isolated
components were conducted i lab testbeds at some of
the partners of the project.
The robot was first deployed at the environment
mainly in a static exhibition, most of the time being
kept inside a room but being available for the chil-
dren to see upon request to the staff. This first period
lasted for around 5 months, during which the robot
was taken out in order for the team to assess different
functionalities, e.g., the navigation system.
The following period lasted for approximately 7
months during which the core functionalities of the
system were developed, namely the games the robot
can play with the children and the communicative
actions and expressions used for human-robot inter-
action. The robot was shown in a normal develop-
ment cycle (sometimes failing) and the children could
watch it during the test runs.
During the last period the robot was used in semi
and full autonomy, wandering around the ward, play-
ing with the children in some occasions. The tun-
ing of the communicative actions and expressions is
currently taking the majority of the effort. This is a
lengthy process, requiring the careful observation of
the environment and trial runs to assess the efficacy of
the interactions.
The Wizard-of-Oz (WoZ) technique (Green et al.,
2008) has proved highly valuable in early stages,
namely as it allowed the testing of a number of inter-
actions (communicative acts in the project parlance,
see (Alonso-Martin et al., 2013)) for later use. In
these experiments, a Wizard controlled some of the
verbal capabilities of the robot and could decide nav-
igation goals. The Wizard role was played by a
project team member located remotely but maintain-
ing a good perception of the environment. This form
of WoZ usage, with real technology in a real environ-
ment, has been reported to be seldom used in research,
(Riek, 2012).
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
242

3 SOFTWARE
The underlying structure of MOnarCH is a network
of software components. It can be assumed that each
of them was developed independently and that the
communication among them is based on some pre-
defined protocol. The dynamics of each of the soft-
ware components is of major importance to the over-
all stability and performance. A component that does
not clearly broadcast its state can prevent other com-
ponents to run properly. Also, the handling of ex-
ception conditions must be carefully defined, e.g.,
transitions between states must occur cleanly. In a
sense this amount to “controllability”and “observabil-
ity” concerns on the overall system (the relevance
of which has been recognized by some authors, e.g.,
(Naganathan and Eugene, 2009)).
The visible part of the system is composed by the
outer shell of the robot (Figure 1), the corresponding
Human-Robot Interaction (HRI) interfaces, and sen-
sors. The HRI interfaces must be used much in a hu-
man way, meaning that visual effects must be well
coordinated with sound effects so that the observers
get the correct perception and the interaction is effi-
cient. The MOnarCH robot has two 1-dof arms and
a 1-dof neck, variable luminosity eyes and cheeks, a
LED matrix for a mouth, loudspeakers, microphone,
bumpers, touch sensors placed in strategic places of
the body shell, and a RFID tag reader. The adequate
coordination of HRI interfaces can be framed as a sta-
bility problem.
In MOnarCH, a key architectural feature that ac-
counts for this concern is called Situational Aware-
ness Module (SAM). In a sense this is a routing in-
formation matrix that defines what are the informa-
tion exchanges, and, if necessary, applies basic trans-
formations to that information (see (Messias et al.,
2014)).
Moreover, performance and stability concerns
have also been addressed through the inclusion of
watchdog mechanisms (see (MOnarCH Project Con-
sortium, 2016)).
The ROS middleware (www.ros.org) supports the
integration of all components. Key features of the de-
velopment are (i) local networking capabilities with
distributed node representation, (ii) global variables
accessible from any node in the system (the topics
in the ROS middleware), (iii) global networking is
useful for monitoring, (iv) fully independent control
of each component, (v) callback mechanisms to deal
with asynchronous events (actionlib), and (vi) state
machine frameworks (smach) for fast behavior devel-
opment, among others. Structures like the SAM mod-
ule can be easily implemented in the ROS middleware
using the built-in facilities. In a sense, a SAM is a col-
lection of direct mappings between ROS topics.
4 MOTION
Motion is the most basic tool for a robot to interact
with humans. In the particular case of inpatient chil-
dren (in the Pediatrics age range velocity and accel-
eration must be carefully selected. Relatively small
accelerations can be perceived by children as menac-
ing. Similarly, fast decelerations can be perceived as
if the robot is untrusty.
Obstacle avoidance is tightly connected to mo-
tion. Real environments can be really challenging,
e.g., children can move in unpredictable ways (see
Figure 2), and collisions are to be expected. When-
ever a robot collides it is a good practice that it clearly
shows that it knows a collision just occurred. A prac-
tical way is to issue a non-verbal sound that can easily
be associated to a collision, e.g., ouch.
The space in the Pediatrics ward is reasonably
structured (see the pictures presented in the paper).
Using an a priori map built with the gmapping ROS
package, (http://wiki.ros.org/gmapping, 2016), is ob-
tained by teleoperating the robot such that all the ward
is covered it is possible to localize the robot only with
the information from the laser scans. The naviga-
tion system in MOnarCH is based on a potential field
approach combining a fast marching method to con-
struct an optimal path to the goal and the repulsive
fields from obstacles, (Ventura and Ahmad, 2014).
Localization is based on the AMCL package, avail-
able in ROS, (http://wiki.ros.org/amcl, 2016), and
uses information from two laser range finders that
scan the full space around the robot. The accuracy of
the pose estimate is in the order of a few cm and de-
grees and the system has been show to have a remark-
able robustness. Observations so far indicate that, on
average, the robot loses its localization less than once
a day. When this happens the unusual behavior of the
robot is enough for an external observer to recognize
it and either alert the project team or push the robot to
a specific location where it can auto-localize easily.
In addition to the motion of the body of the robot,
the 1-dof neck can rotate right/left and it conveys
quite effectively the idea that the robot has a clear fo-
cus of attention. If the head turns because a person
is detected on that side a child tends to conclude that
the robot knows where the person is. If the head turns
to the opposite side where a person is then a plausi-
ble perception is that the robot does not care about the
person and has some other focus of attention. In both
cases the observations suggest that the motion of the
Lessons from the MOnarCH Project
243

(a)
(b)
Figure 2: Children running a toy bike chasing the robot; the
robot must account as much as possible for sudden devia-
tions of the straight line path by the child.
neck is a relevant feature for human-robot interaction.
Also, the two 1-dof arms are used to improve live-
ness. A simple balancing of the arms while the robot
is moving can easily convey the perception that the
robot has a focus while moving or a goal location
where to go.
5 HUMAN-ROBOT
INTERACTION INTERFACES
A basic speech interface is used to convey either ver-
bal or non-verbal sounds. Tone and volume are highly
relevant for a sound message to be perceived properly.
Short verbal and non-verbal sounds can be used
to show liveness. The trigger of such sounds can be
done following an exponentially distributed process,
with the corresponding parameter eventually tuned to
match the environment.
Experiments performed with off-the-shelf Text-
To-Speech systems using adult voices have been
shown to trigger negative reactions by some children,
namely of very young age (even if the sentences are
not aggressive). As an alternative, pre-recorded child-
ish tone speech has been very well received both by
children and adults.
Off-the-shelf automatic speech recognition (ASR)
has been also tested (using for example the
SpeechRecognition-3.4.6 Python based package)
Reasonable recognition rates (from the perspective of
basic HRI) can be achieved when sentences are spo-
ken with clear diction which is often not the case with
children. This reduces the range of interactions that
an be supported on ASR.
A touchscreen in the chest is useful to (i) quickly
convey information on the “emotional state” of the
robot through emoticon-like graphics. Children tend
to be curious about the meaning of the graphics shown
and quickly come up with their own interpretation,
which in a sense amounts to the establishing relation
with the robot.
Touch sensors are placed in various locations be-
low the outer shell. These are non-visible interfaces.
This type of interface tends to be effective with young
children as they are more prone to engaging in touch-
ing behaviors.
Facial expressions, generated by the LED mouth,
eyes, and cheeks, tend to be interpreted as indicators
that the robot is active (often in conjunction with the
graphics displayed in the chest screen).
6 CHILDREN’S REACTIONS
Though the Pediatrics ward covers the full range of
Pediatric ages, the observation showed that ages in
the range 3-8 are the most interested. Moreover, chil-
dren with mild degrees of Asperger syndrome are also
highly receptive to robot interactions. Also, children
love to be recognized by name by the robot. Wearing
a flexible RFID tag attached to the clothes allows the
robot to recognize the children and greet them occa-
sionally.
Children above 10-12 years old may look at the
robot but seldom initiate an interaction. They often
direct gaze to the robot but rarely touch it.
During the initial stages of the project the robot
was deployed at the hospital and when no team mem-
ber was around it was kept in a separate room, with
reserved access. The inpatient children know the re-
served location of robot and often ask the staff to go
there to see it, just to see the robot sleeping.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
244
Currently the robot is kept in a public space, that
is, a docking station that is also used to charge bat-
teries. During the periods at the docking station (the
sleeping periods) the robot maintains a small degree
of liveness, reacting to touch stimulae. Even in this
almost static display children often look for the robot
either to just see it or to touch it and observe the reac-
tion induced by the liveness module.
7 TEAM MEMBERS
The team members working at the environment must
be integrate themselves socially to avoid becoming
biasing/disturbing/distracting factors. Successful in-
tegration smooths potential social barriers that some
people may rise against the robot. In fact this strategy
resulted from a hard constraint imposed by the hos-
pital from the very beginning of the project, i.e., the
hospital should continue to operate normally and not
be transformed in a robotics lab, with the team mem-
bers disturbing the ward.
The integration of the team members occurred
through multiple forms, e.g., explaining the robot to
parents/visitors/staff/children and bringing the robot
to the rooms upon requests by inpatient children with
restricted mobility (see figure 3).
8 PARENTS AND VISITORS
REACTIONS
Parents and visitors were informed about the project
through postcards visible in the walls of the Pediatric
ward. The observations clearly show that parents are
curious about the robot. Direct interactions do occur,
with parents and visitors often looking at the robot
while moving in the ward, take pictures, and even
touching the robot.
As the autonomy of the robot increased parents
and visitors started to become confident asking the
team to adjust the behaviors of the robot. A typi-
cal example is the adjustment of the snoring behavior
the robot exhibits when sleeping, or in the non-verbal
sounds the robot occasionally issues.
9 STAFF’S REACTIONS
Staff was given initially basic information on the
project and on the robot, and on actions to adopt in
case of the robot is disturbing the normal operation of
the ward. A basic instruction was that the robot has
(a)
(b)
(c)
Figure 3: Team members and hospital staff assisting chil-
dren during interactions.
Lessons from the MOnarCH Project
245
an emergency button that can be pushed at any time
to stop it and allow any staff member to push it away.
During the whole period no observations of any staff
member pushing the button were made.
In fact, the staff adapted to this additional mem-
ber that is often seen moving along the main corridor
of the Pediatrics ward. Figure 4 shows a staff mem-
ber pushing a cart and deviation from the robot. The
staff knows that the robot is capable of deviating from
static and moving obstacles but does not wait and per-
forms the evasive maneuver
(a)
(b)
Figure 4: Staff adapting to the behavior of the robot (acting
compliantly).
In some occasions it has been observed that some
staff members like to test the obstacle avoidance ca-
pabilities of the robot, usually for the fun of it, and
try to verify the conditions under which the robot gets
trapped.
Similarly to children, a number of staff members
appreciates being recognized by the robot. RFID tags
worn in the service uniforms allow the robot to occa-
sionally greet the members.
10 METRICS AND ASSESSMENT
A number of metrics is being used to assess the
project. These are based on the activation rates of se-
lected micro-behaviors (units of activations per sec-
ond), annotated from the observations of the exper-
iments (this is a common strategy used by multiple
authors, e.g., (Mead et al., 2011; Scassellati, 2005;
Dautenhahn and Werry, 2002).
Table 1 shows results of a recent experiment at the
hospital. The experiment took place over a period of
two consecutive days.
Table 1: Activation rates (×10
−2
) for a typical experiment
(total duration of 5685 seconds over 2 consecutive days and
a total of 249 micro-behaviors annotated, units are activa-
tions per second).
Micro-behaviors
Activation
rates (robot
showing low
liveness)
Activation
rates (robot
showing high
liveness)
1. Looking to-
wards the robot,
without moving
1.0 0.86
2. Looking
towards the robot
and moving
(around, ahead
and/or at the back
of the robot)
0.64 0.78
3. Touching the
robot
0.16 0.16
4. Aggressive
movement
towards the robot
0.03 0
5. Ignoring the
robot
1.9 1.1
6. Following the
robot
0.32 0.23
7. Compliant
behavior towards
the robot
0.61 0.82
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
246

The values emphasize the importance of using
high levels of liveness. For example, the values sug-
gest that an intention to initiate an interaction may be
bigger if the robot shows that it is alive (lines 2 and 5).
Also, if the robot shows aliveness aggressive micro-
behaviors may be less likely (line 3). The values in
line 6 can be interpreted as a result of curiosity to un-
derstand the behavior of the robot when the liveness
shown is not enough to decide about interacting with
it.
Complex metrics can be defined over the activa-
tion rates of collections of micro-behaviors. For ex-
ample, the acceptance of the robot can be measured
by comparing a combination of micro-behaviors 2,
3, 6, 7 against a combination of micro-behaviors 1,
4, 5. Designing these combinations will be in gen-
eral somewhat subjective but it may provide nonethe-
less useful guidance to adjust the behaviors of the
robot (see (MOnarCH Project Consortium, 2015;
MOnarCH Project Consortium, 2016) for additional
details).
Manual annotations are often subject to large er-
rors. To achieve statistical significance the annota-
tions must (i) focus on experiments made in similar
conditions, namely in what concerns the robot and
the characteristics of the population interacting with
it, and (ii) annotated by multiple persons (or multi-
ple systems in case of automatic annotation). This is
often difficult due to the constantly changing of the
inpatient population. For example, there are periods
where most of the children is in isolation rooms (and
hence cannot interact with the robot) and periods in
which many children are allowed to leave the rooms
(thus being able to play with the robot). This means
that either the experiments take place in close days, or
it may be necessary to wait for the right conditions to
be present.
Independently of the details on how the activa-
tion rates are combined, it seems clear that activa-
tion rates provide interesting quantitative information.
The use of automated system to annotate the micro-
behaviors could further provide, for example, the time
between activations of micro-behaviors and their du-
ration, which are necessary for a complete study of
their probabilistic nature. The use of such systems,
e.g., (www.noldus.com, 2016), is out of the possibili-
ties of the project.
11 CONCLUSIONS
It is commonly accepted that a real social environ-
ment is substantially different from common labora-
tory environments. Achieving successful integration
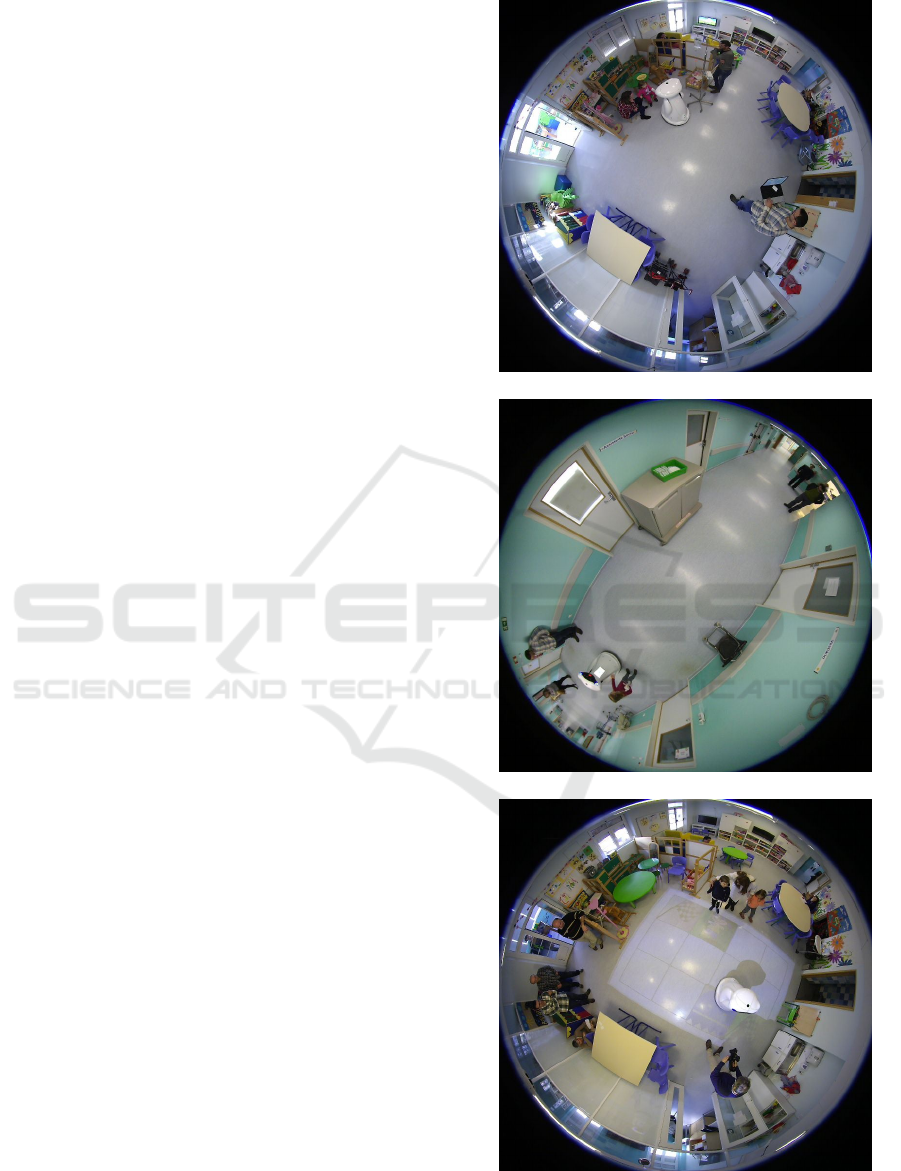
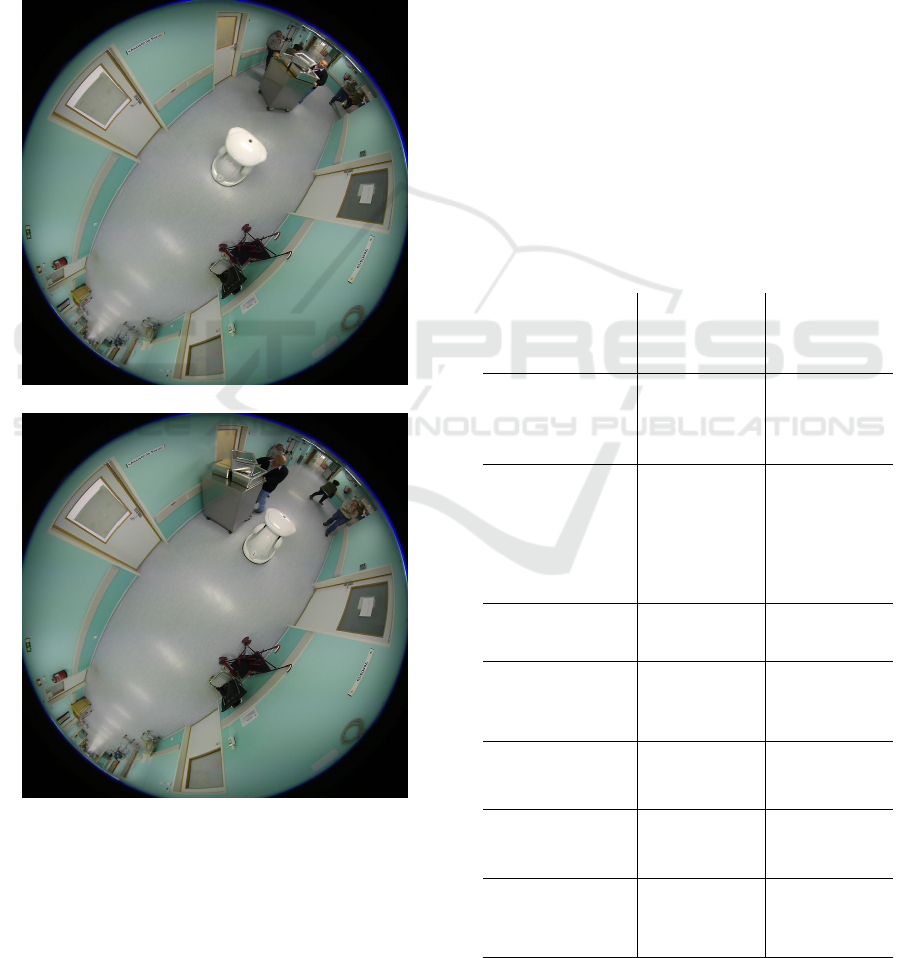
(a)
(b)
Figure 5: Snapshots acquired during the liveness experi-
ments.
of a robot in a real social environment, such as the
Pediatrics ward of the MOnarCH project has been
shown to depend on multiple factors, some outside the
pure engineering scope. Moreover, current off-the-
shelf and state-of-the-art robotics seem well adapted
to the objectives of the project, though technological
improvements may simplify similar systems. There
is no evidence that the lessons learned depend on the
specific type of robot used (wheeled, omnidirectional)
and hence may be useful in projects involving other
types of social robots.
Overall, the high acceptance of the robot by every-
one at the hospital is a clear indicator that the strategy
Lessons from the MOnarCH Project
247

that led to the lessons in the paper was successful.
A quantitative assessment in medical terms of a
robot such as the one developed in the MOnarCH
project may take several years and hence it out of the
scope of the project. Meanwhile, all the indicators
observed in MOnarCH suggest that social robots may
have a highly positive role in socially difficult envi-
ronments.
ACKNOWLEDGEMENTS
Work supported by projects FP7-ICT-9-2011-601033
(MOnarCH) and FCT [UID/EEA/50009/2013].
REFERENCES
Alonso-Martin, F., Malfaz, M., Sequeira, J., Gorostiza, J.,
and Salichs, M. (2013). A Multimodel Emotion De-
tection System during Human-Robot Interaction. Sen-
sors Journal, 13:15549–15581.
Boden, M. (2014). Aaron Sloman: A Bright Tile in AI’s
Mosaic. In Jeremy L. Wyatt and Dean D. Petters and
David C. Hogg, editor, From Animals to Robots and
Back: Reflections on Hard Problems in the Study of
Cognition. Springer. Cognitive Systems Monographs
22.
Dautenhahn, K. and Werry, I. (2002). A Quantitative Tech-
nique for Analysing Robot-Human Interactions. In
Procs. of the 2002 IEEE/RSJ Int. Conf. on Intelligent
Robots and Systems. Switzerland.
Green, S., Richardson, S., Stiles, R., Billinghurst, M.,
and Chase, J. (2008). Multimodal Metric Study for
Human-Robot Collaboration. In Procs. 1st Int. Conf.
on Advances in Computer-Human Interaction, pages
218–233. Sainte-Luce, Martinique, 10-15 February.
http://wiki.ros.org/amcl (2016). Adaptive Monte-Carlo Lo-
calization. Accessed April 2016.
http://wiki.ros.org/gmapping (2016). Gmapping. Accessed
April 2016.
Kim, M. (2007). The HRI Experiment Framework for De-
signer. In Procs. of The 16th IEEE International Sym-
posium on Robot and Human Interactive Communica-
tion (RO-MAN 2007). Jeju, Korea, 26-29 August.
Mead, R., Atrash, A., and Mataric, M. (2011). Prox-
emic Feature Recognition for Interactive Robots: Au-
tomating Metrics from Social Sciences. In In Social
Robotics, volume 7072 of Lecture Notes in Computer
Science, pages 52–61. Springer.
Messias, J., Ventura, R., and Lima, P. (2014). The
MOnarCH Situation Awareness Module. Project
MOnarCH deliverable document available at
http://www.monarch-fp7.eu.
MOnarCH Project Consortium (2015). Project Deliverable
D8.8.4 - Long-Run MOnarCH Experiments at IPOL.
http://users.isr.ist.utl.pt/∼jseq/MOnarCH/Deliverables/
D8.8.4 final.pdf.
MOnarCH Project Consortium (2016). Project Deliver-
able D8.8.5 - Experiments on the MOnarCH Mixed
Human-Robot Environment. http://users.isr.ist.utl.pt/
∼jseq/MOnarCH/Deliverables/D8.8.5-v1c.pdf.
Naganathan, E. and Eugene, X. (2009). Software Stability
model (SSM) for Building Reliable Real time Com-
puting Systems. In Procs. of the Third IEEE Interna-
tional Conference on Secure Software Integration and
Reliability Improvement (SSIRI 2009). July 8-9.
Riek, L. (2012). Wizard of Oz Studies in HRI: A Systematic
Review and New Reporting Guidelines. Journal of
Human-Robot Interaction, 1(1):119–136.
Scassellati, B. (2005). Quantitative Metrics of Social Re-
sponse for Autism Diagnosis. In Procs of ROMAN’05.
Sequeira, J. and Ferreira, I. (2014). The concept of [Robot]
in Children and Teens: Some Guidelines to the Design
of Social Robots. International Journal of Signs and
Semiotic Systems, 3(2):35–47.
Ventura, R. and Ahmad, A. (2014). Towards Optimal Robot
Navigation in Domestic Spaces. July 25 , Joao Pessoa,
Brazil.
www.noldus.com (2016). Innovative solutions for behav-
ioral research. Accessed March 2016.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
248
