
Output Tracking Control for Networked Control Systems
Tiago G. de Oliveira
1
, Reinaldo M. Palhares
2
and V
´
ıctor C. S. Campos
3
1
Graduate Program of Electrical Engineering, Federal University of Minas Gerais, Belo Horizonte, Minas Gerais, Brazil
2
Department of Electronics Engineering, Federal University of Minas Gerais, Belo Horizonte, Minas Gerais, Brazil
3
Department of Electrical Engineering, Federal University of Ouro Preto, Jo
˜
ao Monlevade, Minas Gerais, Brazil
Keywords:
Networked Control Systems, Time Delay, Lyapunov Functional, Integral Inequalities, Takagi-Sugeno Fuzzy
Models.
Abstract:
This paper aims to compare alternative time delay relaxations for a class of nonlinear systems controlled
via network and described by Takagi-Sugeno fuzzy models. In this regard, three alternatives were proposed
and compared with a very recent relaxation proposed in the literature. Basically, the changes are made at
two strategic points. The first point is the Lyapunov functional proposed and the second one is related to
the introduction of different integral inequalities conditions. A numerical example of a network-based fuzzy
tracking control systems is presented to highligth the advantages of the alternatives relaxations.
1 INTRODUCTION
The usual communication network architecture for
control systems established during the past decades
is point to point communication, ie, connection be-
tween the plant, sensors and actuators is made via a
physical medium, for example, a cable. However, the
increasing complexity of control systems is leading
this architecture to reach its limits. Because of this,
more and more communication architectures are be-
ing replaced by one in which all communication is
done through a common communication medium for
all equipments.
The introduction of this type of architecture can
increase the efficiency, flexibility and reliability of
these systems and reduce installation and mainte-
nance costs. Networked Control Systems are cur-
rently in evidence, as they provide the control sys-
tem with features such as cost reduction, easy main-
tainable and increases flexibility and agility (with
regard to possible adaptations and modifications).
These characteristics become more important when
the complexity of control systems increases.
A classic control structure (point to point) con-
siders that the means of communication between the
components are ideal, i.e. there is no loss or delay in
the transmitted information. A networked control sys-
tem should take into account the characteristics of the
physical environment in which the information circu-
lates, because it will influence the system dynamics.
The following characteristics of the physical environ-
ment can be listed:
• Bandwidth: the network may have a limitation in
data transmission capacity, limiting the informa-
tion that travels over the network;
• Packet Loss: the network has information loss,
ie, the information sent may not reach their des-
tiny;
• Delay: the information takes time to reach your
destiny, therefore, a network delay should be con-
sidered.
At the beginning, the NCSs operated using a pe-
riodic triggered control method (also called time-
triggered control). In this triggering method, a fixed
sample interval should be selected to guarantee a de-
sired performance under worst case conditions such
as external disturbances, uncertainties, time-delays
and so on. Therefore, this kind of triggering leads
to sending many “unnecessary” sampling signals
through the network, which incur in high utilization
of the communication bandwidth Yue et al. (2013).
In order to eliminate this problem, it was recently re-
placed by the event-triggered control method. This
method provides a useful way of determining when
the sampling action is carried out, which guarantees
that only “necessary” state signals will be send out
to the controller Yue et al. (2013), which reduces
the utilization of the communication bandwidth. Al-
bert (2004) presents a comparison between event-
Oliveira, T., Palhares, R. and Campos, V.
Output Tracking Control for Networked Control Systems.
DOI: 10.5220/0006003602550260
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 1, pages 255-260
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
255
triggered and time-triggered concepts from the con-
trol theory point of view. Hu et al. (2012); Yue et al.
(2013) an H
∞
tracking controller for NCS with event-
triggering sampling method. Zhang et al. (2015); Jia
et al. (2009); Tseng et al. (2001) design a H
∞
con-
troller for output tracking for a T-S fuzzy system us-
ing the event-triggered method.
In the last years, more and more efforts have been
done to derive new powerful convex stability condi-
tions including alternative integral inequalities as, for
example, the Wirtinger based integral inequality that
has been proven to encompass the standard Jensen in-
tegral inequality Seuret and Gouaisbaut (2013). In
Feng and Zheng (2016) the stability analysis problem
of Takagi-Sugeno fuzzy systems with time-varying
delay is investigated, utilizing the Wirtinger inequal-
ity and the reciprocally convex combination tech-
nique. Souza et al. (2014) presents new less conser-
vative stability conditions analysis for Takagi-Sugeno
fuzzy systems subject to interval time-varying and
based on an appropriate Lyapunov functional selec-
tion combined with an integral inequality choice.
Park et al. (2015a) introduced a Wirtinger based dou-
ble integral inequality and new stability conditions
have been obtained. In Sun et al. (2009) a new delay-
dependent stability is obtained in terms of LMI by
constructing a Lyapunov functional and using integral
inequalities without introducing any free-weighting
matrices.
The main objective of this paper is to derive less
conservative conditions for stability and stabilization
gathering those new relaxations based on integral in-
equalities and modifications to the Lyapunov func-
tional. The idea is to present a state-of-the-art of re-
cent conditions to the problem of output tracking con-
trol for networked Takagi-Sugeno fuzzy models with
event-triggered control. In order to do this, the Lya-
punov functional has been modified to include a triple
integral term as proposed in Zhang et al. (2015) and
its effect has been analysed. The analysis also in-
cludes the new class of integral inequaliteis proposed
in Park et al. (2015) and the so-called auxiliary func-
tions.
Notation: The notation considered in this paper is
standard. sym{X } denotes X + X
T
. “⊗” represents
the Kronecker product for matrices. The term “∗” in-
dicates a term induced by symmetry in a matrix.
2 PROBLEM FORMULATION
This paper deals with nonlinear systems described by
T-S fuzzy models. Consider the system described as
follows:
Plant Rule R
i
: if θ
1
(t) is M
i1
and θ
2
(t) is M
i2
and
... and θ
g
(t) is M
ig
, then:
(
˙x(t) = A
i
x(t) + B
i
u(t) + E
i
w(t)
y(t) = C
i
x(t)
(1)
where i = 1,2,. .., r, and r denotes the number
of if-then rules; x(t) ∈ R
n
is the vector of state
variables; u(t) ∈ R
m
is the vector of control in-
put, w(t) ∈ R
p
is the vector of exogenous in-
puts and y(t) ∈ R
r
is the vector of controlled vari-
ables. θ
j
( j = 1, 2,... ,g) are the premise variables,
θ(t) = [θ
1
(t),θ
2
(t),. ..,θ
g
(t)] ∈ R
g
is a vector com-
posed by stacking the premise variables. M
i j
(i =
1,2, ...,r)( j = 1,2, .. .,g) are the fuzzy sets. A
i
,B
i
,C
i
and E
i
are the system matrices with appropriate di-
mensions.
By making use of a center-average defuzzifier,
product fuzzy inference and singleton fuzzifier, the T-
S fuzzy model is inferred as:
˙x(t) =
r
∑
i=1
µ
i
[A
i
x(t) + B
i
u(t) + E
i
w(t)]
y(t) =
r
∑
i=1
µ
i
[C
i
x(t)]
(2)
This membership functions satisfy the following
properties:
µ
i
∈ [0,1],
k
∑
i=1
µ
i
= 1,
k
∑
i=1
˙µ
i
= 0.
(3)
We also consider the following reference model
(
˙x
r
(t) = A
m
x
r
(t) + B
m
r(t)
y(t) = C
m
x
r
(t)
(4)
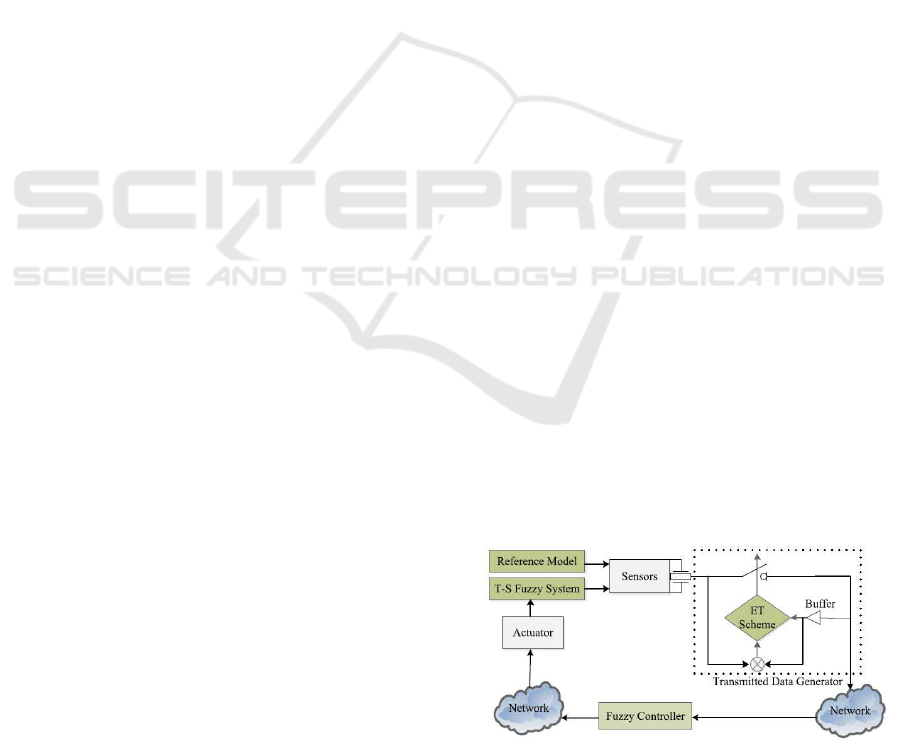
An event-triggered (ET) scheme is introduced to
decide wheter or not the sample-data should be trans-
mitted. Figure 1 shows the configuration of the
network-based fuzzy tracking control system.
Figure 1: Configuration of the system (Zhang et al., 2015).
The initial triggering instant is defined as 0, i.e.
t
k
h = 0, when k = 0. t
k
∈ N is the triggering instant
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
256

and h is the samplig period. The next triggering in-
stant is defined by the following:
t
k+1
= t
k
h + inf
i∈N
n
ih
W
1
2
[ξ(t
k
h + ih) − ξ(t
k
h)]
−ε
W
1
2
ξ(t
k
h)
> 0
o
, ∀k ∈ N (5)
where ξ(t) will be defined in 8.
The parameters ε (0 < ε < 1) and matrix W (W >
0) determinate how frequently and how much sample-
data should be transmitted. In Yue et al. (2013); Peng
et al. (2013); Hu et al. (2012) the parameter W and
controller parameters are determined by some LMI-
based criteria for a given ε.
Clearly the fuzzy system and the fuzzy controller
operate asynchronously due to the event-triggering
process and the network-induced delays in data trans-
mission.
The control rule of the state feedback controller is
defined as follows:
If θ
1
(t
k
h) is M
i1
and θ
2
(t
k
h) is M
i2
and . . . and
θ
g
(t
k
h) is M
ig
, then:
u(t) = F
1i
x(t
k
h) + F
2i
x
r
(t
k
h) (6)
Then, the fuzzy controller is defined as:
u(t) =
r
∑
i=1
µ
i
(θ(t
k
h))[F
1i
x(t
k
h) + F
2i
x
r
(t
k
h)],
t ∈ [t
k
h + τ
tk
,t
k+1
h + τ
tk+1
, ) (7)
where τ
tk
= τ
sc
tk
+τ
ca
tk
. τ
sc
tk
is the delay corresponding to
the time that the information takes to travel between
the system and the controller. τ
ca
tk
is the delay cor-
responding to the time that the information takes to
travel between the controller and the actuator. Other
delays such as the time the computer takes to calcu-
late the controller gains are ignored.
Let e(t) = y(t) − y
r
(t) and ε
k
(t − τ(t)) = ξ(t −
τ(t)) − ξ(t
k
h). Using the system model and the ref-
erence model, an augmented system can be obtained
as follows:
˙
ξ(t) =
r
∑
i=1
r
∑
j=1
µ
i
µ
j
[
¯
A
i
ξ(t) +
¯
B
i
¯
F
j
ξ(t − τ(t))
−
¯
B
i
¯
F
j
ε
k
(t − τ(t)) +
¯
E
i
¯
ω(t)]
e(t) =
r
∑
i=1
µ
i
[
¯
C
i
ξ(t)]
(8)
with ξ(t − τ(t)), the augmented state, and ε
k
(t − τ(t))
satisfying:
W
1
2
ε
k
(t − τ(t))
≤ σ
W
1
2
ξ
k
(t − τ(t)) − ε
k
(t − τ(t)
(9)
where σ is a positive scalar and
¯
A
i
=
A
i
0
0 A
m
,
¯
B
i
=
B
i
0
,
¯
E
i
=
E
i
0
0 B
m
,
¯
C
i
=
C
i
−C
r
,
¯
F
i
=
F
1i
F
2i
,
µ
i
= µ
i
(θ(t)), µ
(k)
i
= µ
i
(θ(t
k
h)) ≥ 0,
,
i = 1, 2,. ..,r,
∑
r
i=1
µ
(k)
i
=
∑
r
i=1
µ
i
= 1, ∀k ∈ N
,
¯
ω(t) =
ω
T
(t) r
T
(t)
(10)
where F
1i
and F
2i
are the fuzzy control gains.
Zhang et al. (2015) designs a network-based fuzzy
tracking controller such that the output of the fuzzy
system follows the output of the reference model as
close as possible by taking into consideration the de-
viation bounds of asynchronous normalized member-
ship functions, which are described by:
|
µ
i
(θ(t)) − µ
i
(θ(t
k
h))
|
≤ δ
i
, i = 1,2, .. .,r, ∀k ∈ N
(11)
where δ
i
are given positive constants. In order to ob-
tain the δ
i
bounds, the Lemmas available in: Zhang
et al. (2015); Peng et al. (2013); Zhang and QL.Han
(2013) are introduced. In this scenario, three different
alternatives are proposed in our paper to be analyzed
and compared with the solution proposed by Zhang
et al. (2015). The alternatives are listed below:
• Alternative 1: Change the Lyapunov functional
in Zhang et al. (2015), by adding a tripple integral
term and use Lemmas 1, 2, 3 and 4;
• Alternative 2: Maintain the Lyapunov functional
in Zhang et al. (2015) and use (Park et al., 2015b,
Lemma 5.1) to modify the integral inequalities;
• Alternative 3: Change the Lyapunov functional
in Zhang et al. (2015) by adding a tripple integral
term to the funcional and use the integral inequal-
ities proposed by (Park et al., 2015b, Lemma 5.1).
For that, we consider the following Lyapunov
functional:
V (t,ξ
t
) =
7
∑
i=0
V
i
(t,ξ
t
) (12)
V
0
(t,ξ
t
) =
ξ(t)
R
t
t−τ
m
ξ(s)ds
T
P
ξ(t)
R
t
t−τ
m
ξ(s)ds
V
1
(t,ξ
t
) =
Z
t
t−τ
m
ξ
T
(s)Q
1
ξ(s)ds
V
2
(t,ξ
t
) =
Z
t−τ
m
t−τ
M
ξ
T
(s)Q
2
ξ(s)ds
Output Tracking Control for Networked Control Systems
257

V
3
(t,ξ
t
) = τ
m
Z
0
−τ
m
Z
t
t+s
˙
ξ
T
(θ)R
1
˙
ξ(θ)dθds
V
4
(t,ξ
t
) =
Z
−τ
m
−τ
M
Z
t
t+s
˙
ξ
T
(θ)R
2
˙
ξ(θ)dθds
V
5
(t,ξ
t
) = (τ
M
− τ(t))
Z
t
t−
¯
τ(t)
˙
ξ
T
(θ)R
3
˙
ξ(θ)dθ
V
6
(t,ξ
t
) = (τ
M
− τ(t))
(ξ(t) − ξ(t −
¯
τ(t)))
T
R
4
(ξ(t) − ξ(t −
¯
τ(t))]
V
7
(t,ξ
t
) =
Z
0
−τ
Z
t
t+s
Z
t
t−λ
˙
ξ
T
(θ)G
1
˙
ξ(θ)
Z
0
−τ
Z
t
t+s
Z
t
t−λ
dsdθdλ
where ξ
t
= ξ(t + θ), ∀θ ∈ [−τ
M
,0], P =
P
11
P
12
P
21
P
22
with P
ii
= P
T
ii
, Q
i
= Q
T
i
,(i = 1, 2), R
i
= R
T
i
,(i =
1,2, 3,4), G
1
= G
T
1
,(i = 1,2).
The main difference between this functional and
the one proposed in Zhang et al. (2015) is the intro-
duction of the triple integral term in V
7
. Notice that
alternative 02 makes use of the same Lyapunov func-
tional as Zhang et al. (2015). Given all of this, we are
now able to present the conditions in the result below.
Theorem 1: Given positive scalars
γ,τ
m
,τ
M
,ε, δ
i
(i = 1,2, .. .,r), σ and a weighting ma-
trix U > 0, under the event-triggered communication
scheme, the system 8 is asymptotically stable with
the L
2
-gain tracking performance, if there exist sym-
metric matrices W > 0,P
ii
> 0,Q
i
> 0,R
i
> 0,G
i
> 0
and matrices P
12
,X, S,Z,M
i
,N
i
(i = 1,2, .. .,r),T
i j
=
T
T
ji
(i, j = 1,2, .. ., 2r) such that the following LMIs
hold:
P
11
P
12
∗ P
22
> 0, (13)
R
2
S
∗ R
2
> 0, (14)
Ξ
(1)
i j
Γ
i
τZ
T
e
T
1
X
T
C
T
i
∗ −γ
2
I 0 0
∗ ∗ −τR
3
0
∗ ∗ ∗ −U
−1
≤ 0, (15)
Ξ
(2)
i j
Γ
i
e
T
1
X
T
C
T
i
∗ −γ
2
I 0
∗ ∗ −U
−1
≤ 0, (16)
T
1,1
T
1,2
.. . T
1,2r
T
2,1
T
2,2
.. . T
2,2r
.
.
.
.
.
.
.
.
.
.
.
.
T
2r,1
T
2r,2
.. . T
2r,2r
< 0, (17)
T
i j
+ T
ji
− 2M
i
≤ 0, (18)
−2N
j
− T
( j+r),(i+r)
− T
(i+r),( j+r)
≤ 0. (19)
where e
i
= I(i,:) ⊗ I (i = 1, 2,...,9) are the p × 9p
matrices, I denotes a matrix identity of order p, I(i,:)
denotes the i-th row of an 9 × 9 identify matrix, p is
the dimension of ξ(t),
Ξ
(1)
i j
=Ω
(0)
i j
+ e
3
εWe
3
+ sym
e
T
3
εWe
4
− (1 − ε)We
4
− κ
0
ϒκ
T
0
,
Ξ
(2)
i j
=Ω
(0)
i j
+ τΩ
(1)
i j
+ e
3
εWe
3
+ sym
e
T
3
εWe
4
− (1 − ε)We
4
− κ
0
ϒκ
T
0
,
Ω
(0)
i j
=e
T
1
(A
i
X + X
T
A
T
i
+ Q
1
+ P
12
+ P
T
12
− 9R
1
−
R
4
)e
1
+ e
T
2
(τ
2
m
R
1
+ τ
2
R
2
− σX + σX
T
)e
2
+
e
T
3
(S
T
+ S − 2R
2
)e
3
− e
T
5
R
4
e
5
+
e
T
6
(Q
2
− Q
1
− 9R
1
− R
2
)e
6
+ e
T
7
(Q
2
+ R
2
)e
7
− e
T
8
180R
1
e
8
− e
T
9
720R
1
e
9
+ sym
e
T
1
σX
T
A
T
i
−X + P
11
)e
2
+ e
T
1
B
i
Y
j
e
3
− e
T
1
B
i
Y
j
e
4
+ sym
e
T
1
R
4
e
5
− e
1
(2R
1
+ P
12
)e
6
+e
T
1
(τ
m
P
22
+ 6R
1
)e
8
sym
e
T
2
σB
i
Y
j
e
3
− e
T
2
σB
i
Y
j
e
4
+ e
T
2
τ
m
P
12
e
8
+ sym
e
T
3
(R
2
− S
T
)e
6
+ e
T
3
(R
2
− S)e
7
+
e
T
6
Se
7
+ sym
e
T
6
(6R
1
− τ
m
P
22
)e
8
+
Z
T
(e
1
− e
5
)
,
Ω
(1)
i j
=sym
e
T
1
R
4
e
2
− e
T
2
R
4
e
5
+ e
T
2
R
3
e
2
,
Γ
i
=e
T
1
E
i
+ e
T
2
σE
i
,
ϒ
i j
=
T
i j
+ T ji + T
(i+r),( j+r)
+ T
( j+r),(i+r)
2
+ T
i,( j+r)
+ T
( j+r),i
−
r
∑
k=1
δ
k
M
i
+
T
ik
+ T
ki
2
+ N
j
+
T
( j+r),(k+r)
+ T
(k+r),( j+r)
2
.
The fuzzy control gains and the matrix in the
event-triggered communication scheme are given by
¯
F
j
= Y
j
X
−1
( j = 1,2, .. .,r) and W = X
−T
¯
W X
−1
.
Proof. The proof is similar to that of Proposition 1
in (Zhang et al., 2015, Appendix A and B) with the ex-
ception of using Lemmas (Park et al., 2015b, Lemma
5.1) instead of (Zhang et al., 2015, Lemma 2), and
thus is omitted.
Remark: The other proofs are also similar. Alter-
native 1 uses the Lyapunov functional 12 and (Zhang
et al., 2015, Lemmas 1, 2, 3 and 4) to the integral
terms. Alternative 2 uses the same Lyapunov func-
tional of Zhang et al. (2015) and the (Park et al.,
2015b, Lemma 5.1) instead of (Zhang et al., 2015,
Lemma 2).
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
258

3 EXAMPLE
We consider the example in (Zhang et al., 2015,
Section 5, p. 38). The purpose is to compare the
maximum allowable upper bounds that guarantee the
asymptotic stability of each system. We consider an
initial state x(0) = [1 0]
T
and x
r
(0) = −2, distur-
bance input ω(t) = 12cos(t)e
−t
and reference input
r(t) = 6 sin(1.2t)e
−0.11t
. Consider the following T-S
fuzzy system.
¯
A
1
=
0 1 0
0 −0.1 0
0 0 −1
,
¯
A
2
=
0 1 0
25 −0.1 0
0 0 −1
,
¯
E
1
=
¯
E
2
=
0 1 0
0 0 1
T
,
¯
B
1
=
¯
B
2
=
0 1 0
T
,
¯
C
1
=
¯
C
2
=
1 0 −1
,
D =
{
x(t) : |x
1
(t)| ≤ 5, |x
2
(t)| ≤ 4
}
µ
1
(θ(t)) = 1 − x
2
1
(t)/25, µ
2
(θ(t)) = x
2
1
(t)/25,
θ(t) = x
1
(t).
This system is described in the augmented form
as in (8). Table 1 presents the maximum allowable
upper bound to the time-varying delay, τ
2
, achieved
for a given lower bound, τ
1
.
Table 1: System.
Method τ
1
= 0 τ
1
= 0.5 τ
1
= 1.0
Zhang et al. (2015) 0.12 0.72 1.41
Alternative 1 1.45 2.23 2.69
Alternative 2 2.13 2.73 3.27
Alternative 3 2.47 2.79 3.58
The results obtained show that the alternatives
proposed can provide higher upper bounds than ex-
isting results. For comparision purpose, the max-
imum time-varying delay is set to 1.0 s. The
gains of the state feedback controller were obtained
through Alternative 3, which was the best alterna-
tive among the alternatives proposed, that is:
¯
F
1
=
[−5.9879 − 7.2412 22.7661] and
¯
F
2
= [−3.2195 −
0.93731 11.763]. Figure 2 depicts the output tracking
errors. In a tracking problem, it is expected that the
tracking error tends to zero as time increases. Notice
that the error obtained by Alternative 3 is smaller than
the error obtained in Zhang et al. (2015).
Generally, considering small values of delay, the
result obtained by Zhang et al. (2015) is very similar
to the results obtained through the alternatives pro-
posed in this article. The great advantage of the meth-
ods proposed in this article is that they maintain a bet-
0 5 10 15 20 25 30
−10
−5
0
5
e(t)
Alternative 3
0 5 10 15 20 25 30
−10
−5
0
5
Time (s)
e(t)
Zhang et al. (2015)
Figure 2: Output Tracking Error.
ter output tracking dynamic for a greater range of de-
lay values.
Figure 3 presents the output tracking responses.
Applying an input signal with limited energy, it is ex-
pected that the output signal of the system has lim-
ited energy. As can be seen, for the maximum de-
lay value equal to 1.0 s, both systems present output
signal with limited energy. According to the figure,
the controller designed through Alternative 3 presents
a better disturbance rejection in relation to the con-
troller designed by Zhang et al. (2015).
0 5 10 15 20 25 30
−10
−5
0
5
y(t) − Alternative 3
y
r
(t)
0 5 10 15 20 25 30
−10
−5
0
5
Time (s)
y(t) − Zhang et al. (2015)
y
r
(t)
Figure 3: Output Tracking Responses.
Figure 4 depicts the performance of the system
states. What is expected in this problem is to mini-
mize the effect of disturbances in the first state vari-
able, acting only in the second state variable of the
model as denoted by the input matrices B
i
. As we can
note, the controller obtained using Alternative 3 re-
jects the disturbance in the second state variable bet-
ter than the controller designed by Zhang et al. (2015).
Note that the axes of this figure have different ampli-
tudes, in order to obtain the best resolution possible.
Output Tracking Control for Networked Control Systems
259

0 5 10 15 20 25 30
−2
−1
0
1
2
3
x
1
(t) − Alternative 3
0 5 10 15 20 25 30
−10
−5
0
5
x
1
(t) − Zhang et al. (2015)
0 5 10 15 20 25 30
−10
−5
0
5
x
2
(t) − Alternative 3
0 5 10 15 20 25 30
−150
−100
−50
0
50
100
Time (s)
x
2
(t) − Zhang et al. (2015)
Figure 4: States of the Systems.
4 CONCLUSION
In this paper the output tracking problem for net-
worked control has been handled considering differ-
ent choices for integral inequalities relaxations as well
as proper selection of Lyapunov functionals. In gen-
eral, the results obtained suggest that less conserva-
tive conditions can be obtained just considering slight
alterations in very recent results.
ACKNOWLEDGMENT
The authors acknowledge the financial support of the
Brazilian agencies CNPq and CAPES.
REFERENCES
Albert, A. (2004). Comparison of event–triggered and
time–triggered concepts with regard to distributed
control systems. Embedded World, 2004:235–252.
Feng, Z. and Zheng, W. X. (2016). Improved stability con-
dition for Takagi–Sugeno fuzzy systems with time–
varying delay. IEEE Transactions on Cybernetics.
Hu, S., Zhang, Y., and Du, Z. (2012). Network–
based H
∞
tracking control with event–triggering sam-
pling scheme. IET Control Theory & Applications,
6(4):533–544.
Jia, X., Zhang, D., Hao, X., and Zheng, N. (2009). Fuzzy
tracking control for nonlinear networked control sys-
tems in Takagi–Sugeno fuzzy model. IEEE Transac-
tions on Cybernetics, 39(4):1073–1079.
Park, M., Kwon, O., Park, J. H., Lee, S., and Cha,
E. (2015a). Stability of time-delay systems via
Wirtinger–based double integral inequality. Automat-
ica, 55:204–208.
Park, P., Lee, W. I., and Lee, S. Y. (2015b). Auxil-
iary function–based integral inequalities for quadratic
functions and their applications to time-delay systems.
Journal of the Franklin Institute, 352(4):1378–1396.
Peng, C., Han, Q., and Yue, D. (2013). To transmit or not
to transmit: a discrete event–triggered communication
scheme for networked Takagi–Sugeno fuzzy systems.
IEEE Transactions on Fuzzy Systems, 21(1):164–170.
Seuret, A. and Gouaisbaut, F. (2013). Wirtinger–based in-
tegral inequality: application to time–delay systems.
Automatica, 49(9):2860–2866.
Souza, F. O., Campos, V. C. S., and Palhares, R. M. (2014).
On delay–dependent stability conditions for Takagi–
Sugeno fuzzy systems. Journal of the Franklin Insti-
tute, 351(7):3707–3718.
Sun, J., Liu, G., and Chen, J. (2009). Delay–dependent sta-
bility and stabilization of neutral time–delay systems.
International Journal of Robust and Nonlinear Con-
trol, 19(12):1364–1375.
Tseng, C., Chen, B., and Uang, H. (2001). Fuzzy track-
ing control design for nonlinear dynamic systems via
Takagi–Sugeno fuzzy model. IEEE Transactions on
Fuzzy Systems, 9(3):381–392.
Yue, D., Tian, E., and Han, Q. (2013). A delay system
method for designing event–triggered controllers of
networked control systems. IEEE Transactions on Au-
tomatic Control, 58(2):475–481.
Zhang, D., Han, Q., and Jia, X. (2015). Network–based
output tracking control for Takagi–Sugeno fuzzy sys-
tems using an event-triggered communication scheme.
Fuzzy Sets and Systems, 273:26–48.
Zhang, X. and QL.Han (2013). Novel delay–derivative–
dependent stability criteria using new bounding tech-
niques. International Journal of Robust and Nonlin-
ear Control, 23(13):1419–1432.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
260
