
Methodological Aspects for the Development of Information Systems
of Unmanned Mobile Vehicles
Sergey Sokolov
and Andrey Boguslavsky
Keldysh Institute of Applied Mathematics, Miusskaya Sq. 4, Moscow, Russia
Keywords: Unmanned Mobile Vehicles, Information Support Systems, Real Time Vision Systems, Programming
Framework, Interpreting Navigation, Configuration Space.
Abstract: In the work there is analyzed a process of developing and arranging information support systems of mobile
vehicles with the enhanced autonomous level and fully autonomous. There are reviewed current trends in
creating this sort of systems. In order to increase the effectiveness of processes of creating intellectual
autopilots it is proposed to introduce into the review the space of similar systems configuration. The space
axes are: sensors, models of environment, and algorithmic support. The points of this space are “assemblage
points” of particular application systems. The configuration space enables to efficiently resolve the process
of creating information support systems with the help of compliance matrixes, evaluate possible options of
arranging the particular system. There are proposed solutions on components per each axis of the
configuration space. As the basis for mobile means information systems the real time multifunctional vision
systems and software-hardware unification is proposed. In terms of the hardware components, there are
reviewed, in detail, arrangements of real time vision systems. The construction of external world models is
proposed to establish on the interpreting navigation concept. In terms of algorithmic support, the
combination of the split-level processing algorithms is proposed to implement based on large-scale frames
and unification of software implementations. Examples of using the above-described approaches and
solutions are presented.
1 INTRODUCTION
The peculiarity of robotics is integrity, integration of
achievements of various fields of knowledge. The
replacement of a person in his/her activities in the
world around us requires the perception of this
world and skill to move intentionally within it. The
information support is an essential part of mobile
and actually the main part of autonomous robots.
The feature of robotics on the present stage is a shift
from the purely scientific disciplines and narrowly
specialized spheres of application into the more
demandable means of reviewing technological and
economical aspects of creating robotics systems
(RS). The prevailing issues are reliability and
economic efficiency of the systems being created. It
is possible to determine two principle trends of
creating this sort of systems. The first one (we guess,
the dominating one) is the development/provision of
needed transport infrastructure in which there is a
motion of autonomous/automatic devices. The
second trend is the intellectualization of autopilots.
The main distinguishing feature is the effort to
overcome the infrastructure disadvantages or
complexities of external conditions at the expense of
increasing capabilities of the on-board analyzer.
Up to now there are known a few projects of
creating mobile robotics systems with the enhanced
autonomous level. After the competitions in terms of
purposeful motions of autonomous ground vehicles
under the aegis of the US Defense Advanced
Research Projects Agency (DAPRA) (Buehler et al,
2007, 2009) there have been activated works on
creating commercial versions of similar systems.
The well-known corporation Google since 2010 has
been working on the project of “self-managed” light
vehicle (Markoff, 2010). The US automobile
company Oshkosh Truck Corporation has developed
based on the heavy hauler a vehicle-robot (Defence
Talk, 2006). The prototype of this vehicle
participated in races DARPA 2004 and 2005. The
US automobile company Ford demonstrated an
autonomous Ford on the snow – driving in hard
viewing conditions (on the practice ground in
Michigan) (Ford Motor Company, 2016). Nissan
492
Sokolov, S. and Boguslavsky, A.
Methodological Aspects for the Development of Information Systems of Unmanned Mobile Vehicles.
DOI: 10.5220/0006003904920498
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 492-498
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

(North Korea) based on the standard electric car
Nissan Leaf is developing an autonomous vehicle
which is passing field tests (Kadakov, 2015).
Cognitive Technologies (Russia) in September 2015
notified about tests of autonomous KAMAZ on the
practice ground in Naberezhnye Chelny (informed
by Cognitive Technologies press-service), in
October 2015 there appeared massages about tests of
unpiloted KAMAZ on the practice ground in
Noginsk (KAMAZ, 2015).
As examples of the most interesting non-
commercial projects of unmanned mobile vehicles
it’s possible to name two US projects with more than
ten-year history. NASA program of creating and
using MARS rovers (1997 – present time) (Ellery,
2016). DAPRA program (USA) of creating
unmanned flight vehicles, in particular, X47B
project (lenta.ru, 2012).
The solution of tasks of information support of
intellectual mobile RS requires the incorporation of
scientific-technical achievements of such areas as
applied mathematics, sensory, computer science,
mechanics, control theory, artificial intellect, etc.
About the complexity of tasks set in front of the
developers of similar systems say the resources and
the time dedicated by the developers to meet the
target goals. The total cost of NASA and Jet
Propulsion Lab project aimed at creating the MARS
rover Curiosity Rover 2012 is estimated as 2.5bln
USD. Such powerful companies as Google and Ford
having more than a ten-year study experience join
their efforts for the creation of unmanned vehicle
(Automotive News, 2015). The Russian program of
creating the unmanned vehicle is estimated as
300bln RUB. ROSAVTODOR is already spending
annually 4bln RUB on the road marking for the
unmanned vehicles (Alizar, 2015).
2 CONFIGURATION SPACE
In order to find way around a multidimensional
space of problems when solving particular practical
tasks of intellectual mobile robotics and determine
the ways of forming technologies of development,
we propose to structure the variety of the
components of the information support systems
(ISS) within control systems over such objects and
make a review in the configuration space. Each axis
of this space represents a plurality of possible
solutions/arrangements of respective elements.
Along one axis, there are sensors, along the second
one there are view models of the environment, along
the third one there are information processing
algorithms. In the conventional cube of this space,
it’s possible to select alternative ways of collecting
and processing information for the intellectual
management over the intentional motions of mobile
robots.
In the review we’ll pay special attention to the
unification of the software-hardware components as
an important means of supplying reliability and
economic efficiency of the proposed solutions.
2.1 Sensor Support of the Onboard ISS
The common list of means of sensor support systems
of control over autonomous mobile objects at
present is rather clearly identified. Shortly it may be
characterized as follows. Traditional internal sensors
of the mobile means plus sensors of external world.
For the ground mobile vehicles such sensors are
radars (as a rule, LIDARs), gyroscopes,
accelerometers, satellite navigation systems and
vision system (VS). VS is the one, “external”
component of the information support system of the
ground unmanned vehicles, which represents the
principle interest of our review. For the unmanned
vehicles in other spaces (air, underwater) this set
kind of changes with account of environment
properties (for example, ultra-sound detectors and
side-scan sonars for the underwater vehicles,
phased-array radars, radio and barometric altimeters
for flight vehicles), but does not change the system-
wide software-hardware ISS architecture of
intellectual control systems. As a note, the
characteristics of applied sensors are closely
connected with requirements to the capacities of the
onboard computers providing acquisition and
processing of the respective data.
Analysis of the current state of the developments
in the sphere of mobile vehicles ISS enables to
identify such trends in the arrangement of mobile
vehicles with sensor systems.
The priority issues of arrangement are those of
complexation: all sensor systems; sensor systems of
various ranges of radiant energy; 2D and 3D data.
VS of the visual, IR, radar bands in totality or
separately become an essential component of
intellectual autopilots.
We’ll discuss in more detail the requirements to
the most widespread and demandable VS type, i.e.
visible range VS. We should note such specific
requirements to video-cameras as part of VS of the
contemporary mobile vehicles as:
– resolution (from 2Mb and higher);
– random access to raster units;
– signal output to the unified digital channel,
Methodological Aspects for the Development of Information Systems of Unmanned Mobile Vehicles
493

possible in various modes, but with obligatory
mode “no compression”;
– responsivity/dynamic range;
– automatic control over the optical system
stopping;
– external synchronization.
In order to assure requirements to the
hardware/sensor devices when arranging the mobile
vehicles ISS there is widely used COTS technology,
i.e. method is well-known, well-proven for the
arrangement of new highly-sophisticated
complicated systems. In terms of sensory provision
as means of gathering information about external
world in real-time scale, there are well-proven 3D
selective control detectors, in combination with
visual data about the same spatial domain. As
examples of such solutions we can indicate both
which have become well-known Lidar devices (for
“outdoor” application”), Kinect (for “indoor”
application”), or similar, and author’s developments
of VS with operated structured illumination based on
spherical motors of direct control (Sokolov et al,
1995).
Universal computer based on IBM PC
compatible architecture is the basis for integration of
module solutions. We propose a computing control
part of the real-time VS as the most resource-
intensive, to take as the basis of arrangement of the
computing part of the information support system of
the intellectual control systems. Article 4 will
provide examples of successful application of such
approach.
2.2 Presentation of the External World
in the Autopilot Information
Support System
The problem of describing the external world in the
computer presentation is not new and there is a
range of approaches to its solution. The use of
external world model in the onboard computer of
mobile facility imposes additional constraints both
on the computer capacities and on the real-time scale
where it’s necessary to operate the model.
Notwithstanding various studies in the area of
external world simulation, we should state the
absence of databases to store object-oriented data
with the access in real-time scale.
Presentation about the external world in the
onboard control systems of mobile vehicles is
constructed with the use of the so called “navigation
cross” (Figure 1).
When solving navigation tasks we take as the
basis for the construction of external world model
the interpretive navigation concept that has been
developing since 80ies last century (Sokolov and
Kirilchenko, 2015). The basis of the concept is made
of following statements. As the presentation of
knowledge about the external world there is used not
a quantitative model in the absolute coordinate
system, but a qualitative one as a sequence of
interchange areas with same informative-visual
contents. The model is formed as the information
equivalence graph (IEG) This presentation serves a
supplement and development of approaches of
SLAM in the provision of goal-oriented motions of
mobile vehicles in a weakly structured, unfamiliar
environment.
GRNSS
IN
MOBILE
VEHICLE
CONTROL
SYSTEM
CNS
OPERATOR
Figure 1: Diagram “navigation cross”, where GRNSS –
global radio-navigation satellite system; CNS –
conventional navigation system including processes of
reckoning and adjustments by reference points; IN –
interpretive navigation.
The arrangement of the external world model as
IEG is cost-effective with regard to the computer
capacities and enables to unify the motion planning
stage independently from the level of highlighting
the reference marks in the surrounding environment.
In the software implementation of the external
world presentation there is used a unified instrument
tool to work with the graphs. This structure
implements polymorphism during the work with
various structures. It uniformly operates with feature
descriptions of the landmarks, circles and belts of
the landmarks, areas of the information equivalence,
anthologies of the textual description of scenes and
sets of visual data processing algorithms.
The movement control language in the mode of
tele-programming based on interpretive navigation is
more natural for the communication of the operator
and unmanned transport vehicle as it applies “the
commonly-accepted” logics of explaining the route
based on dynamic pattern in the process of
movement along this route of visible descriptions of
the environment based on the reference marks.
The issues of unified presentation of the
environment model are on the stage of elaboration
and reaching the technological solutions.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
494
2.3 Algorithmic Supporting
When reviewing the main issues of the vision
system in the current intellectual autopilots and
determining the main requirements to them, there
are defined the most specific groups of algorithms of
detecting and identifying objects on images. For the
criteria of the algorithms quality, it is proposed to
review robustness, localization, and computing
implementation, in particular, with such a
characteristic as the number of operations per pixel
in-process. The effectiveness of performing these
requirements depends on the selected technology of
receiving and preliminary processing of the input
information about the observed object space, applied
structure solutions and algorithms of transforming
information showing the observed object space into
the applied model. All this in totality determines the
main characteristics of the system, such as
persistence, validity of recognition, accuracy of
performed actions, and technical feasibility.
There are determined ways of satisfying
requirements to the algorithmic supporting of the
intellectual mobile vehicles: rational data selection;
effective processing; hardware implementation;
sensory systems integration of ISS; unification of
software solutions.
The above ways are shown in the software-
hardware architecture. In particular, in order to
implement low and intermediate algorithm levels the
following hardware facilities are widely applied:
Multi-core general processors (Sokolov and
Boguslavsk, 2011); GPU (Vasilyev et al., 2011);
other special video-processors; FPGA;
Combination of the above-listed (Krasnobaev, 2005)
Review of the available publications and
conferences’ documents shows that some computer
vision tasks have been brought to the stage of
technological solutions, i.e. known combination of
algorithms of visual data collection and processing.
Results of the recent software surveys (Laplante,
2004; Rankin al., 2011; Hillel et al., 2012; Tumofte
et al., 2014) enabled to activate and extend the VS
application in practical robotics tasks. There are
works proposing metrics for the quality evaluation
of the real time vision systems (Baranov and
Telezhkin, 2014; Baranov and Nikiforov, 2015).
Practical possibility of using stereo-systems in real
time scale has been justified (Wagner et al., 2002).
The above achievements in the area of
algorithmic supporting leave open a question about
the technology of complexing the algorithmic
supporting of particular application tasks.
2.4 Proposed Implementation of
Algorithmic Supporting
Distinctive features of the proposed approach to the
formation of the software for the information
support of unpiloted mobile vehicles are as follows:
• Provision of possibility for the cross-platform
development based on universal PC and high-
speed carry to the special computing platforms at
the expense of division of the software into the
set of interacting parallel subsystems.
• Specialization of the original VS programming
frame at the expense of extension within the
developed software architecture for the
interaction with external subsystems of
unmanned vehicles.
• The extended subsystem of processing visual
data from a few point of view assuring the real-
time processing of video-sequences from high-
resolution visual sensors.
• Use of reusable components to process the visual
data for the prototyping of software being
developed.
• Implementation of special debugging tools to
assure the reproducibility of the software
operation on the development and testing stage.
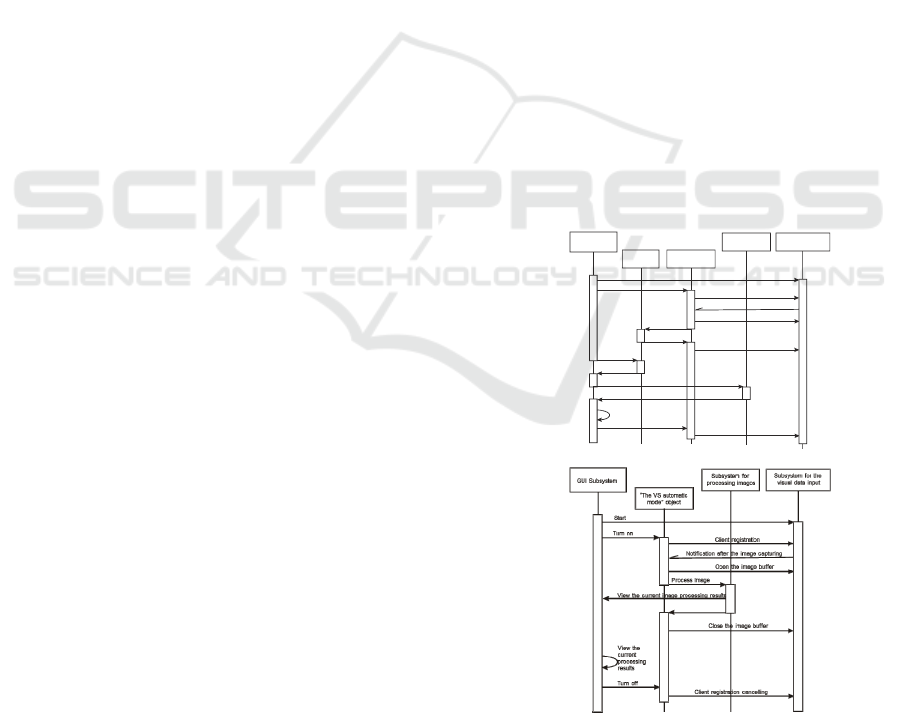
Fig.2 shows unified structural units of the VS frame.
Subsystem for the
visual data input
Start
Client registration
Turn on
Notification after the image capturing
Open the image buffer
Copy image
Close the image buffer
Get the current
Image
Process image
View the current
processing results
Turn off
Client registration cancelling
Subsystem for
processing images
“The VS adjustment
mode” object
“Frame buffer”
object
GUI Subsystem
a)
b)
Figure 2: Unified structural units of the VS frame: а) –
system setup mode; b) – automatic mode.
Implementation of all algorithms included into
Methodological Aspects for the Development of Information Systems of Unmanned Mobile Vehicles
495

the software frame are supplied with characteristics
of performance time on some or other hardware
support tools.
Direct analogs for the software as functional
frame and set of typical modules for unmanned and
semiautomatic vehicles are not available. Some
solutions from related subject area are known.
• Functional libraries implementing algorithms of
processing images and computer vision
(OpenCV, LeadTools, HALCON) do not contain
full applications and implementations of the
application level architectures.
• Rapid application development environment to
process images (Matrox Assistant, National
Instruments LabVIEW) are aimed at industrial
automation tasks and use of closed software-
hardware platform. They are not available on the
level of initial texts and do not enable to control
the functioning of the application in real-time
mode.
• Prototypes of algorithms (extension packs
MATLAB) are aimed at adjusting some
algorithms which require the transfer or repeated
implementation for the use in the target
application.
The described tools are good on the stage of the very
first surveys, but during the shift to the technologies
of implementation from these surveys to the onboard
means there is a big distance that may have hard
obstacles such as real-time scale requirements and
coherence of all components.
In comparison with all above-described
solutions, the proposed software system simplifies
the design and incorporation of information systems
based on visual information processing at the
expense of using the worked-out software
components and expended software model (Sokolov
and Boguslavsky, 2011).
2.5 ISS Arrangement Scheme
Here-below there is an approximate mobile means
ISS arrangement scheme of the intellectual mobile
robot to solve a specific task.
The arrangement process is iterational.
1. Wording of the formalized description of a task
in the language of object description, external
world (target environment) and necessary actions
(transformations) with the objects in its state
space. (The efficient approach of this
arrangement stage is a proven method of
constructing anthologies of the subject field).
2. The external world model is being formed.
3. There are selected hardware sensory tools
assuring the receiving of needed initial data (to
form the external world model).
4. There is formed a set of algorithms for the
information support of solving the goal-oriented
task.
5. Testing of capability of finding/reaching all
above-listed components and calculation of the
possession cost.
6. Definition: arrangement is acceptable? If yes, the
process is completed; if not, the transfer to the
next iteration (steps 1-5)
For a quantitative estimation of MV ISS
configuration process quality it is possible to use
deviation size (Δ) of current ISS configurations
from system of requirements / the technical project.
This size is defined by the function of the
coordination depending on matrixes of conformity in
planes of configuration space. In the described initial
stage of researches linear function of the
coordination was considered Δ = X - W Σα
i
R
i
,
where: X - a set (tuple) of variables of the
configuration space meeting requirements to packed
ISS; R
i
- a conformity matrix; α
i
- importance factor;
W - a matrix of the dimension coordination.
3 EXAMPLES OF
IMPLEMENTATIONS
We’ll enlist a few examples of using the above-
described unified software in tasks of mobile
vehicles information support.
Control over railway infrastructure objects.
Railway infrastructure objects are quite different and
need a regular state control. Vision systems are
widely used in the mobile control facilities. They
help to collect data, and the results of control are
formed in the deferred analysis. We proposed
intellectual mobile modules which enable to process
the visual data «on line” (Sokolov et al., 2012). The
above-described approaches permitted to shortly
solve a few control tasks of such railway
infrastructures as position finding of the contact wire
heightwise and on the map, determination of
interacting force of the contact wire and pantograph;
control over realigning of rails, inspection over the
shoulder of ballast section and other additional
parameters of the track structure. All measurements
and control data are fixed to absolute (GIS and
GPS/GLONASS) and relative (route) coordinates.
Implementation of the algorithmic supply on
three general-purpose computers with Intel Pentium
4 2.4 GHz processor enables to inspect objects in
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
496

one field of view at speed up to 250 km/h.
Automatic monitoring surveillance system of
approximation and docking processes of space crafts
and ISS. One of the most important stages of the
space craft flight is their approximation and
coupling. Based on the visual data there has been
developed Automatic monitoring surveillance
system of approximation and coupling processes of
space crafts and ISS. The system enables to
determine, in automatic mode, parameters of relative
movement of space crafts and ISS, analyzes their
compliance with the permitted values and shows
information in a way acceptable for the perception
by the person-operator or automatic control system
(Boguslavsky et al., 2004).
Night vision system to help the driver. VS based
on thermal camera analyzes environment in front of
the moving vehicle and provides information about
the vehicle position with regard to roadway, warns
about possible traffic obstacles such as other
vehicles or pedestrians. The system mock-up
showed good results both in urban environment and
on country roads (Sokolov et al., 2008).
The implementation of algorithmic supply on
one general-purpose computer with Intel Core Quad
2.4 GHz processor enables to acquire appropriate
information at speed up to 90km/h.
VS as part of mobile laboratory for online
diagnostics of road surface. VS to control the state
of the toad surface is intended to check wheel
tracking, cracks, holes, defects of road marking. VS
consists of looking-forward video-camera and three
cameras with structured lighting. All results of
visual data processing are integrated with
GPS/GLONASS data about the positioning of
mobile laboratory and electronic route map (Sokolov
et al., 2012).
Implementation of the algorithmic supply on
three general-purpose computers with Intel Core i7
2.4 GHz processors enables to inspect the road
surface at speed up to 120 km/h.
VS as part of mobile complex of operational
mapping. VS task as part of mobile complex of
operational mapping is putting, on the electronic
map, objects located along the route of the mobile
complex. Besides VS, which consists of two stereo-
pairs, the complex includes GIRS, satellite
navigation system, odometer, and program making
e-maps. Data from all the subsystems are integrated
for the precise location of the objects found within
view. Some objects are identified and recorded into
GIS in automatic mode (road signs and other known
engineering facilities), some other part is fixed in
semiautomatic mode with the operator’s
involvement (Sokolov et al., 2011).
The implementation of algorithmic supply on
three general-purpose computers with Intel Core i7
1.8 GHz processors enables to make operational
mapping at speed up to 60km/h.
Unmanned flying vehicle VS as part of the
onboard navigation equipment for piloted and
unmanned flying vehicles. Based on the VS
development of the ground mobile vehicles there is
formed a VS software-hardware architecture for
information support of automatic movement of a
flying vehicle on the runway, take-off and landing.
On the VS mock-up there have been obtained
assessments of accuracy characteristics of the
system. Experiments with the mock-up as part of the
flying laboratory confirmed a possibility of
successful application of the vision system as part of
supplementary independent information channel for
the provision of automatic control over the flying
vehicle when moving along the RW, take-off and
landing (Sokolov et al., 2015).
4 CONCLUSION
There have been reviewed trends in creating
information support systems of mobile vehicles with
the enhanced level of autonomous and fully
autonomous. It is stated a shift of mobile robotics
from the rank of purely scientific disciplines and
narrowly-specialized fields of application into the
rank of more demandable tool of solving a wide
range of tasks of human activity. Vision systems
occupy the first roles in systems of information
support of mobile vehicles. In order to increase the
efficiency of processes of creating intellectual
autopilots of the mobile vehicles and to reduce a
price of the autopilots it is proposed to introduce for
the review a configuration space of such systems. In
this space, it is proposed a methodology of arranging
the information support systems of the mobile
vehicles with the real-time vision systems as central
part.
On the basis of generalization of requirements to
hardware and unification of VS software
architecture and its realization in the form of
software framework the universal architecture of
systems of autopilots information support is
generated. Examples of economically expedient
solution of applied problems of land, air and space
application with use of the described technique are
resulted. In the meantime, a wide range of questions
still needs their settlement. This is also a
construction of more distinct metrics on the axis of
the proposed configuration space and construction of
Methodological Aspects for the Development of Information Systems of Unmanned Mobile Vehicles
497

matrix of the components of information support
systems compliance, and some others. The solution
of the specified problems makes the program of the
further works of our group.
ACKNOWLEDGEMENTS
The work partly involves grants RFBR № 15-08-
06341, 16-08-01282 and grant RSF № 16-19-10705.
REFERENCES
Buehler, M. et al., 2007. The 2005 DARPA Grand
Challenge, Springer.
Buehler, M. et al., 2009. The DARPA Urban Challenge,
Springer.
Markoff, J., 2010. Google Cars Drive Themselves, in
Traffic. In The New York Times. October 11, 2010.
Self-driving car, https://www.google.com/selfdrivingcar
Defence Talk, 2006. https://lenta.ru/news/2006/01/26/
Oshkosh.
Ford Motor Company, 2016. http://www.ford.ru/
AboutFord/News/Vehicle/2016/Vhcl_160113.
Kadakov, М., 2015. Calculate cameras of unmanned
Nissan Leaf.http://www.zr.ru/content/articles/839794 -
derzhim-ruki-u-rulya-samoupravlyaemogo-nissan-leaf.
KAMAZ Company, 2015. http://www.kamaz.ru/press/
releases/bespilotnyy_kamaz_uzhe_na_doroge.
Ellery, A., 2016. Rover vision – fundamentals. In
Planetary Rovers, Springer, pp.199-262.
Lenta.ru, 2012. USA have finished deck tests unmanned
X-47B. http://lenta.ru/news/2012/12/20/x47b/.
Automotive News. Ford and Google companies will unite
efforts on unmanned cars. https://www.drive.ru/news
/ford/567936dc95a65602f50000c2.html.
Alizar A. Pilotless "Kamazy" leave on general purpose
roads. Geektimes, https://geektimes.ru/post/264602/.
Sokolov, S.M., Max, D.P., Wallace, R.S., 1995. Simple
multi function vision system for 3D data acquisition.
In Proceedings of ICAR95, 7th International
Conference on Advanced Robotics. Barcelona, Spain,
vol. 2, pp. 674-678.
Sokolov, S.M., Kirilchenko, A.A., 2015. Information
support of autonomous land vehicles on the basis of
interpreting navigation. In News SFU. Engineering
science. №1, p. 120-133.
Sokolov S.M., Boguslavsky A.A. Intellectual Images
Processing for a Realtime Recognition Problem. //
Proc. The 2nd Intern. Multi-Conf. on Complexity,
Informatics and Cybernetics (IMCIC2011), Orlando,
Florida, USA, March 27
th
-30
th
, 2011, Orlando, Florida,
USA, Vol. II, pg.406-411.
Vasilyev, A.I., Boguslavskiy, A.A., Sokolov, S.M., 2011.
Parallel SIFT-detector implementation for images
matching. In Proc. of the 21st Conference on
Computer Graphics and Vision, GraphiCon’2011.
September 26-30, 2011, Moscow, pp. 173-176.
Krasnobaev A.A. The review of detecting an image simple
elements algorithms and the analysis of their hardware
realization of possibility. Proc. KIAM RAS. 2005, http:
//keldysh.ru/papers/2005/prep114/prep2005114.html
Laplante, Software engineering for image processing
systems. CRC Press, 2004.
Rankin al., Unmanned ground vehicle perception using
thermal infrared cameras // Proc. SPIE Unmanned
Systems Technology XIII, 2011(SPIE, 2011).
Hillel A., Lerner R., Levi D., Raz G. Recent progress in
road and lane detection: a survey // Machine Vision
and Applications, February 2012.
Tumofte R., Zimmermann K., Van Gool L. Multi-view
traffic sign detection, recognition, and 3D localisation
// Machine Vision and Applications, April 2014,
Vol.25(3), pp.633-647.
Baranov, S.N., Nikiforov V.V. Density of Multi-Task
Real-Time Applications // Conference of Open
Innovation Association, FRUCT, 2015-June, pp. 9-15.
Baranov S.N., Telezhkin A.M. Metrics for Software
Development. // SPIIRAS Proceedings, issue 5(36),
2014. p. 5-27.
Wagner M. et al. Principles of Computer System Design
for Stereo Perception // Carnegie-Mellon University
Technical Report, CMU-RI-TR-02-01, 2002.
Sokolov, S.M., Boguslavsky, A.A., Trifonov, O.V.,
Computer vision as a part of systems of intellectual
control on railway transportation. In Proc. of the first
scientific and technical conference «Intellectual
control systems on a railway transportation».
November,15-16,2012,Moscow,OpenSociety "NIAS".
Boguslavsky, A.A., Sazonov, V.V., Sokolov, S.M.,
Smirnov, A.I., Saigiraev, K.U., 2004. Automatic
Vision-based Monitoring of the Spacecraft Docking
Approach with the International Space Station. In Proc
of the ICINCO 2004, First International Conference
on Informatics in Control, Automation and Robotics.
Setúbal, Portugal, Vol. 2, pp. 79-86.
Sokolov, S.M., Boguslavsky, A.A., Platonov, A.K., Kiy,
K.I., Gorelik, L.I., Filachev, А.М., Fumin, А.I., 2008.
An IR Channel-Based Automated Driver Assistance
System. In Proc. WMSCI’08, 13th Intern. Conf on
Systemics, Cybernetics and Informatics. Orlando,
Florida, USA, July 29-Aug 3, 2008, vol.III, p.368-373.
Sokolov, S.M., Boguslavsky, A.A., Vasilyev, A.I.,
Trifonov, O.V., 2012. Methodical and practical
aspects of system engineering of computer vision for
navigation and measurements. In News SFU.
Engineering science. №3, pp.76-85.
Sokolov, S.M., Boguslavsky, A.A., Vasilyev, A.I.,
Trifonov, O.V, Nazarov, V.G, Frolov, R.S., 2011. A
mobile complex for operative creation and updating of
navigation maps. In News SFU. Engineering science.
№3, pp. 157-166.
Sokolov, С.М., Boguslavsky, А.А., Feudorov, N.G.,
Vinogradov P.V. Vision System for information
support of automatic landing and movement on
runway. In News SFU. Engineering science, 2015,
№1, pp. 96-109.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
498
