
Skill Level Evaluation of Motion Curved Surface Character
Kaoru Mitsuhashi
1
, Hiroshi Hashimoto
2
and Yasuhiro Ohyama
1
1
Department of Mechanical Engineering, School of Engineering, Tokyo University of Technology, Hachioji, Tokyo, Japan
2
Master Program of Innovation for Design and Engineering, Advanced Institute of Industrial Technology, Tokyo, Japan
Keywords: Skill Level, Microsoft Kinect, B-spline Curve Surface, Visualization, Gradient Curvature Distribution,
Experts and Beginners, Correlation Diagram, Motion Curved Surface Training.
Abstract: The skill teaching/succession method is not quantitative but qualitative, which is abstract oral or gesture
expression. Quantitative teaching is difficult for teacher/instructor. In previous research, Expert and beginner
perform the sports and entertainment motion, and the character of the motion curved surface is analysed using
Microsoft Kinect (RGBD camera). The character is the maximum curvature and surface area. However, the
usage of characters is uncertain. In this research, we investigate the correlation of maximum curvature and
surface area from motion curved surface in before and after training. Therefore, we visualize the different
correlation of experts and beginners from the characters and the transition of the skill training.
1 INTRODUCTION
The physical motion of experts, in the entertainment,
traditional ceremony, sport, engineering, is difficult
to play for beginners. Then, learners/beginners are
taught the skill by expert teacher/instructor, and are
training repeatedly. The training method is watching
and imitating the expert physical motions (Hashimoto
et al., 2011). However, the teaching method is still not
quantitative but qualitative, which are expressions in
abstract words, onomatopoeia words, or metaphor
(Fujino et al., 2005). The quantitative skill teaching is
difficult to express and perform (Taki et al., 1996).
Therefore, beginners cannot always imitate the same
motion because of the different recognition from
beginners (learners) and experts (teachers).
In conventional research, physical movements are
captured and analyzed by multiple video camera
movie and application (Takeo and Natsu, 2011),
(Cheung et al., 2003), (Sigal and Black, 2006).
However, the capture of physical movement is
difficult in equipment, which should be wearing the
many markers and installing the large space.
Furthermore, only the movie evaluation is limited or
no meaning. Therefore, the physical motion (of
experts and beginner) is evaluated just a little. On the
other hand, we focus Microsoft Kinect, which is a
reasonable and easy operation/equipment. Kinect can
recognize pictures and depth positions, and is a useful
tool function and expected the application to three-
dimensional (3D) measurement. Kinect can extract a
human's outline and the position of the human
skeletons/joints automatically. Then, angles of the
skeleton and joint positions are measured (Murao et
al., 2011), (Hashimoto et al., 2014). However, they
can only evaluate the joint angle in time, but cannot
invest the whole body motion. Moreover, the only
quantitative evaluation of joint angle and extracting
position may be no meaning. Namely, only joint
angle evaluation is not necessary in many cases.
In previous research, we visualize a physical
motion (human joint trajectory) into a motion curved
surface, and extract the difference between beginners
and experts (Mitsuhashi et al., 2014), (Suneya et al.,
2014). Therefore, we can evaluate physical/technical
skill quantitatively, and suggest the skill
succession/teaching method for expert
teacher/instructor. In addition, we compose the
motion curved surfaces made from the multiple
Kinect view, so as to track the whole joint motion in
more detail, and confirm the validity of skill
succession by watching skeleton motion movie and
curved surface (Mitsuhashi et al., 2015). However,
the exemplary motion curved surface has not been yet
established for physical/technical motion, because the
number of subjects is very few. Only the visualizing
motion curved surface for expert instructor cannot be
evaluated the skill level or the exemplary motion.
Therefore, the large number of subjects and
numerical tendency for motion curved surface is
Mitsuhashi, K., Hashimoto, H. and Ohyama, Y.
Skill Level Evaluation of Motion Curved Surface Character.
DOI: 10.5220/0006004304990504
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 499-504
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
499
necessary for skill evaluation.
In this paper, we create many motion curved
surfaces using the previous method, and investigate
the correlation of character from the motion curved
surface. The character is maximum curvature and
surface area. By means of expressing the diagram of
the motion curved surface character, the different and
tendency of experts and beginners is extracted. In
addition, we investigate the transition of training
effectiveness for beginners from correlation diagram.
2 EXPERIMENT METHOD
2.1 Motion Tracking Method
In this paper, the movement of the whole body in
physical motion is tracked by Kinect. The trajectories
of human’s joints are measured by depth sensing and
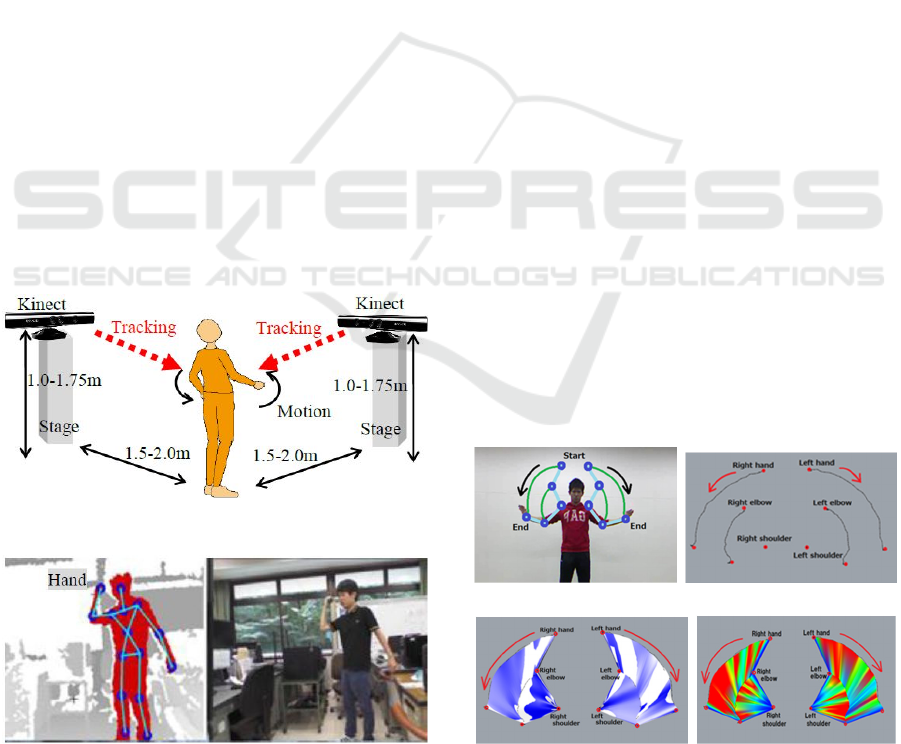
image recognition. Figure 1 shows the motion
tracking state. Multiple Kinects are placed the height
position of 1.0-1.75m and the distances between
Kinects and human are 1.5-2.0m. We measured using
multiple Kinect, because some joints are not tracked
by occluding an obstacle or body parts oneself in
large or rotating motion. In addition, the motion
curved surfaces are different shape from the front
view and back view, because the motion curved
surface exist both the correct tracking parts and
incorrect tracking parts.
Figure 1: Motion tracking state.
(a) Depth image (b) RGB color image
Figure 2: Kinect view.
Then, the multiple curved surfaces are composited
from both correct curved surfaces. Figure 2 shows an
image recognition of the user. Figure 2(a) shows an
image recognition of the human. Figure 2(b) shows a
depth image recognition with human joints and
skeleton model. Positions of joints and skeletons are
estimated by Kinect driver. Kinect can measure the
position of 25 joints. Line segments in Figure 2(b) are
displayed with measuring the position of the joints
using the OpenCV library. Kinect programing
language is C/C++ and using openNI2, NiTE2
library. A human’s joint positions are
measured/calculated in every 0.02 seconds with the
time series.
2.2 Motion Curved Surface
Visualization
The physical motion is visualized to a curved surface
in the preceding section. In order to visualize a curved
surface, the data of a human joint position of point
cloud based on a time series is preserved, and B-
spline curved surface is fitted to the point cloud by the
approximation. The curved surface makes the human
trajectory direction in time series, and makes the
direction of joint positions, which is hand-to-elbow,
elbow-to-shoulder, etc... Figure 3 shows the joint
trajectories and motion curved surface when the
human opens the arms and squats down. The
generated curved surface calculates the area, size,
normal vectors, tangent vectors, and curvatures using
3D-CAD software Rhinoceros in Figure 3. Figure
3(b) shows the trajectory of upper joints. Figure 3(c)
shows the gradation display of curvature and Figure
3(d) shows the zebra mapping display. Zebra
mapping is an analytical technique to visualize
continuities of the curvature.
(a) RGB color image (b) Joints trajectory
(c) Gradient curvature (d) Zebra mapping
Figure 3: Visualized motion curved surface.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
500
The motion curved surface is fitted by an
approximation method. The lines are only continuous
segments because the joint trajectories are discrete
point cloud; that is, the lines are not enough to create
curved lines. Then, the point cloud is converted to
fitting curve lines by approximation methods. The
approximation is the method for smoothly passing a
curved line or surface through only the neighborhood
of the point cloud, not through all the points. It
enables to control fuzzily the occurrence of the gap
and vibration of the joint trajectories by the error of
the sensor or image recognition. In this paper, we
adopt the approximation method, and the uniform
cubic B-spline curved line or surface. B-spline
surface allows for a singular point and maintaining
the curvature continuity.
When the physical motions are converted the
motion curved surface display, a curved surface may
be twisted or overlapped. Then, the motion curved
surface is divided if the angle between the standard
vector and the other is larger than 180 degrees, after
the first standard normal and tangent vectors are
decided. Furthermore, the motion curved surface is
divided also if the self-intersection on a curved
surface or edge is occurring. Then, we are able to
prevent a twist and overlap of a curved surface.
3 MOTION CURVED SURFACE
OF SOCCER KICK
3.1 Motion Curved Surface Shape
We investigate the physical motion curved surfaces
of the inside (pass) kick in soccer. The subjects are
10-year-experience expert and beginner, the number
of experts is 3, beginner is 17. Subjects perform the
kicking motion in the front and side of Kinects, their
lower half of the body (foot, knee, and hip) is tracked.
All subjects are measured two times every one week.
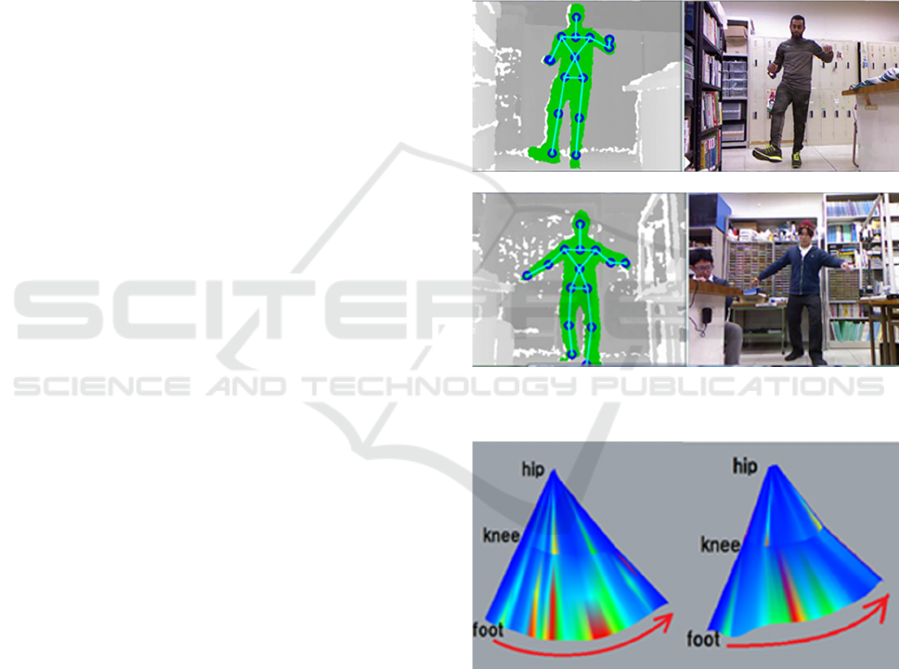
The situation of inside kick motion in soccer is shown
in Figure 4. From figure, the subjects kick in imaging
pass far away.
Figure 4 (a) shows expert’s motion of RGB and
depth image with joints and skeletons, and Figure 4
(b) shows beginner’s motion. The visualized physical
motion curved surface of the expert’s is shown in
Figure 5. Figure 5 shows the motion curved surface
with the gradient curvature distribution when the right
leg is kicking. In this result, second time motion is not
different from first motion. From the figures, the
expert’s motion curved surfaces have fanned shape,
because the expert’s hip motion is small and the foot
trajectory is a conic arc (the foot motion is large).
Three expert’s surfaces (motions) are similar to other
expert’s surface (motion). These results are the same
in zebra mapping.
Figure 6 shows the beginner’s motion curved
surfaces with the gradient curvature distribution when
the right leg is kicking. In this result, the beginner’s
motion curved surfaces have trapezoid or rectangular
shape, because the beginner’s hip motion is large and
the foot trajectory is a straight line (the foot motion is
small). All surfaces (motions) are not similar to other
surfaces (motions). According to an expert’s opinion,
the pass ball control is bad, if the hip motion is large.
(a) Expert image
(b) Beginner image
Figure 4: Inside kick motion in soccer.
(a) 1st time (b) 2nd time
Figure 5: Motion curved surface of expert
(gradient of curvature in inside kick).
In addition, stretching nee and fixing hip (waist)
is most important. Learner (beginner) should kick
without bending the legs. The striped zebra mapping
(pattern) of the beginner’s motion is heterogeneous.
Skill Level Evaluation of Motion Curved Surface Character
501
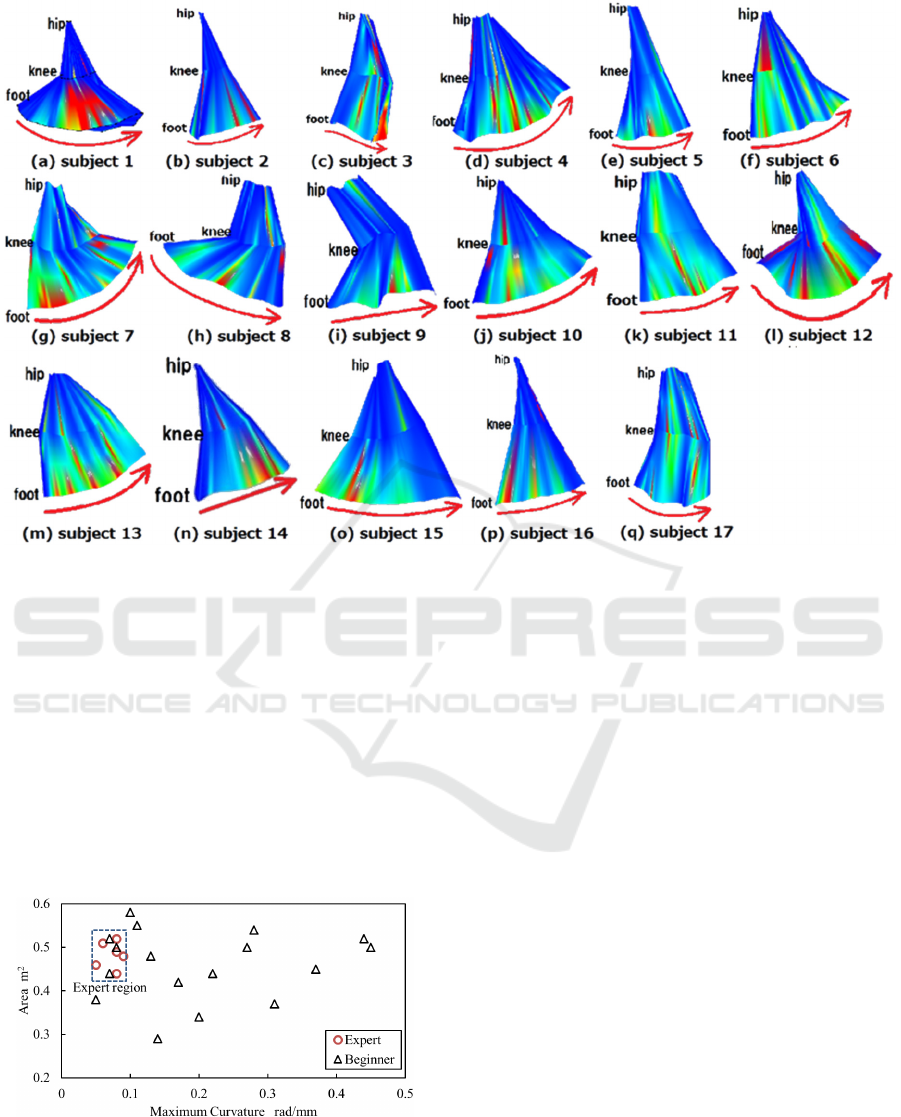
Figure 6: Motion curved surfaces of beginner (gradient of curvature in inside kicking motion).
3.2 Correlation of Surface Character
We investigate the correlation of motion surface
characters, which are the maximum curvature and
surface area. The correlation of the maximum
curvature and the curved surface area are shown in
Figure 7. From the figure, expert’s distribution is
gathered to small regions, that is, experts repeat the
similar physical motion. On the other hand,
beginner’s distribution is large and varied (scattered).
The beginner’s maximum curvatures are large,
because the leg is bent.
Figure 7: Correlation of motion surface character.
The beginner’s surface areas are small, because
the foot motion is small. According to an expert’s
opinion, the reason is that beginner kick strongly or
weakly. Then, we decide the expert’s region, which is
0.05-0.10 rad/mm maximum curvature and 0.40-0.55
m2 surface area. If learner’s (beginner’s) data is
placed near expert’s region, the learner’s skill level is
increasing. Therefore, skill level can be evaluated
using the expert’s region.
4 KICK TRAINING USING
MOTION CURVE SURFACE
We have not confirmed the increasing level and
changing the motion curved surface characters yet,
only visualized the skill level using the characters.
Then, we investigate the character correlation using
kick training. The training method is watching a
motion movie with or without motion curved surface.
The movie is 2D viewer. The movie with motion
curved surface is to watch the expert’s curved surface
model made by ARToolKit and OpenGL library
using head mount display (Mitsuhashi et al., 2015).
First, four beginner subjects are tracked the
kicking motion in soccer. Next, two subjects watch
the movie without surface model, and the movies are
only expert’s motion. The others watch the movie
with expert’s motion curved surface model. And both
subjects train to watch or move in 10 minutes. Figure
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
502

8 (a) shows the watching situation only the movie
without movie, Figure 8 (b) shows the training
situation with expert’s motion curved surface model,
which is placed at right lower half body (foot, knee,
and hip) side. After training, four subjects are tracked
the kicking motion again.
Figure 9 shows the before training curved surface
for four beginners. They are trapezoid (large hip
motion) or bending shape (bending the knee), or
narrow triangle shape (small foot motion). Figure 10
shows the after training curved surface. Figure 10 (a)
shows the watching movie without surface model
(Subject 1 and 2), Figure 10 (b) shows the watching
movie with surface model (Subject 3 and 4). From the
figures, all the surfaces are similar to expert’s fan-
shaped surface, and their foot trajectory is a curved
line (segment). However, motion curved surfaces of
training with the model are nearer the expert’s surface
than training without a model. We consider that train
with model is enabled to understand the lower half
body trajectory.
We investigate the skill level change from the
character correlation. Figure 11 shows the correlation
and the change of the maximum curvature and the
curved surface area. From the figure, all beginners
approach the expert’s region. The approach of
learners with surface model is larger than the learners
without model, because the learner to model move the
foot consciously. On the other hand, the learners
without model can’t recognize the lower half body
trajectory in learner’s opinion. In this result, we prove
the skill training validity using the motion curved
surface. Therefore, increasing skill level can be
evaluated using the character correlation.
5 CONCLUSIONS
We investigate the correlation of the character using
the motion curved surface, and the different and
tendency of experts and beginners is extracted. In this
result, the curved surface of expert’s motion is created
repeatedly as the same shape, and different from
many beginner surfaces. From the correlation of the
maximum curvature and the curved surface area,
expert’s distribution is gathered to small region. On
the other hand, beginner’s distribution is large and
varied. In addition, we investigate the transition of
training effectiveness for beginners from character
correlation. In this result, all the shapes of surface are
similar to expert’s shape, but motion curved surfaces
of training with the model are nearer the expert’s
surface than training without a model. According to
the character correlation, all beginners approach the
expert’s region. The approach of learners with the
surface model is larger than the learners without a
model. Therefore, we prove the skill training validity
using the motion curved surface. In future work, the
motion velocity or acceleration curved surface is
suggested, and the new method of skill training using
motion curved surface.
(a) Only watching movie (b) Motion with surface
Figure 8: Training the inside kicking motion in soccer.
(a) Only watching movie (b) Motion with surface
Figure 9: Motion curved surface of before training.
(a) Only watching movie (b) Motion with surface
Figure 10: Motion curved surface of after training.
Figure 11: Correlation of motion curved surface character
in before and after training.
ACKNOWLEDGEMENTS
This work was in part supported by JST RISTEX
Service Science, Solutions and Foundation Integrated
Research Program.
Skill Level Evaluation of Motion Curved Surface Character
503

REFERENCES
Hashimoto, H., Yoshida, I., Teramoto, Y., Tabata, H., and
Han, C., 2011. Extraction of Tacit Knowledge as Expert
Engineer's Skill based on Mixed Human Sensing,
Proceedings of the 20th IEEE International Symposium
on Robot and Human Interactive Communication,
pp.413-418, 2011.
Yoshitaka Fujino, Kousei Inoue, Masao Kikkawa,
Emi Nishina, and Tsuneo Ymamada. Sport
Onomatopoeia Data Base for Motor Learning, Japan
Society for Educational Technology, Vol.29, pp.5-8,
2005, (in Japanese)
Taki, T., Hasegawa, J. I., & Fukumura, T. (1996,
September). Development of motion analysis system
for quantitative evaluation of teamwork in soccer
games. In Image Processing, 1996. Proceedings,
International Conference on Vol. 3, pp. 815-818. IEEE.
Yasushi Takeo , Wataru Natsu, 2011. Development of
valuation Method for Measurement Skill Training,
Proceedings of International Symposium on
Standardization Education and Research 2011 Tokyo
Japan, pp.130-145
Cheung, K. M. G., Simon Baker, and Takeo Kanade., 2003.
Shape-from-silhouette of articulated objects and its use
for human body kinematics estimation and motion
capture, Computer Vision and Pattern Recognition,
2003. Proceedings. 2003 IEEE Computer Society
Conference on. Vol. 1. IEEE, pp.77-84
Sigal, Leonid, and Michael J. Black., 2006. Humaneva:
Synchronized video and motion capture dataset for
evaluation of articulated human motion. Brown
Univertsity TR 120
Toshiyuki Murao, Yasuyuki Hirao and Hiroshi Hashimoto,
2011. Skill Level Evaluation for Taijiquan based on
Curve Fitting and Logarithmic Distribution Diagram of
Curvature, SICE Journal of Control, Measurement, and
System Integration, 4, 1, pp.001–005
Hiroshi Hashimoto, Mizuki Nakajima, Seiichi Kawata,
Sang-Gyu Shin, Toshiyuki Murao, 2014. Skill Level
Evaluation of Taijiquan based on 3D Body Motion
Analysis, Proc. Of IEEE International Conference on
Industrial Technology (ICIT2014), CD-ROM, 2014
Kaoru Mitsuhashi, Hiroshi Hashimoto, and Yasuhiro
Ohyama, 2014. The Curved Surface Visualization of
the Expert Behavior for Skill Transfer Using Microsoft
Kinect, 11th International Conference on Informatics
in Control, Automation and Robotics (ICINCO 2014),
September1-3, Wien, Austria, 2014, pp.550-555
Mitsuki Suneya, Masaki Kutsuna, Kaoru Mitsuhashi,
Yasuhiro Ohyama, and Hiroshi Hashimoto, 2014. The
Curved Surface Visualization of Behaviors for Skill
Inheriting using RGBD camera. SICE System
Integration 2014 (SI2014), December 14-17, Tokyo,
Japan. Pp.67-71, (in Japanese)
Kaoru Mitsuhashi, Hiroshi Hashimoto, and Yasuhiro
Ohyama, 2015. Motion Curved Surface Analysis and
Composite for Skill Succession using RGBD Camera,
12th International Conference on Informatics in
Control, Automation and Robotics (ICINCO 2015),
July21-23, France, 2015, pp.406-413
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
504
