
Human Tracking in Occlusion based on Reappearance Event Estimation
Hassan M. Nemati, Saeed Gholami Shahbandi and Bj
¨
orn
˚
Astrand
School of Information Technology, Halmstad University, Halmsatd, Sweden
Keywords:
Detection and Tracking Moving Objects, Extended Kalman Filter, Human Tracking, Occlusion, Intelligent
Vehicles, Mobile Robots.
Abstract:
Relying on the commonsense knowledge that the trajectory of any physical entity in the spatio-temporal do-
main is continuous, we propose a heuristic data association technique. The technique is used in conjunction
with an Extended Kalman Filter (EKF) for human tracking under occlusion. Our method is capable of tracking
moving objects, maintain their state hypothesis even in the period of occlusion, and associate the target reap-
peared from occlusion with the existing hypothesis. The technique relies on the estimation of the reappearance
event both in time and location, accompanied with an alert signal that would enable more intelligent behavior
(e.g. in path planning). We implemented the proposed method, and evaluated its performance with real-world
data. The result validates the expected capabilities, even in case of tracking multiple humans simultaneously.
1 INTRODUCTION
An autonomous mobile robot is not only expected to
self-localize and navigate through the environment,
but also perceive and understand the dynamic of its
surrounding to avoid collisions. Becoming aware
of moving objects is a contributing factor to this
objective. From this perspective, object detection and
tracking is a crucial requirement for a safe operation,
especially in environments where humans and robots
share the work space. In the context of intelligent
vehicles, human detection and tracking is an im-
portant concern for automation safety. Examples
of such context are self-driving cars in cities and
auto-guided lift trucks in warehouses (see figure 1.)
The challenge is often referred to as Detection and
Tracking Moving Objects (DTMO), which also
contributes to the performance of SLAM algorithms
(Wang and Thorpe, 2002).
Related Works: Various techniques and algo-
rithms have been proposed for movement and human
detection using different types of sensors. Some ap-
proaches are based on 2D and 3D laser scanners (Cas-
tro et al., 2004), (Xavier et al., 2005), (Arras et al.,
2007), (Nemati and
˚
Astrand, 2014), (Lovas and Barsi,
2015), visual sensors and cameras (Papageorgiou and
Poggio, 2000), (Dalal and Triggs, 2005), (Tuzel et al.,
2007), (Schiele et al., 2009), (Zitouni et al., 2015), or
a combination of both laser scanners and visual sen-
sors (Zivkovic and Krose, 2007), (Arras and Mozos,
2009), (Linder and Arras, 2016).
The accuracy, robustness, and metric result of
range scanner sensors makes them more suitable, and
consequently the favorable choice. The number of
employed sensors varies depending on the approach.
For instance (Mozos et al., 2010) uses three laser
scanners in different heights to detect human’s legs,
torso, and the head. Carballo et al. in (Carballo et al.,
2009) employ a double layered laser scanner to de-
tect legs and torso. In these approaches, the pose of
the tracked object (what we call “target”) is estimated
after fitting a model to the measurements of the sen-
sors. While using multiple sensors improves the per-
formance of system, it comes with a trade off on the
cost and maintenance of more sensors.
For many task such as path planning and obsta-
cle avoidance, detection of the objects alone does not
suffice. Such tasks require the ability to track the mo-
tion and predict the future state of the moving objects.
In order to reliably track a moving object’s motion,
one must tackle different challenges, such as non de-
terministic motion model and occlusion. Under such
circumstances, using a probabilistic framework is cru-
cial (Schulz et al., 2001).
The human tracking problem can be reduced to a
search task and formulated as an optimization prob-
lem. Accordingly, the human tracking problem could
be considered as a deterministic or a stochastic prob-
lem. In case of the deterministic methods, the track-
ing results are often obtained by optimizing an ob-
jective function based on distance, similarity or clas-
Nemati, H., Shahbandi, S. and Åstrand, B.
Human Tracking in Occlusion based on Reappearance Event Estimation.
DOI: 10.5220/0006006805050512
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 505-512
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
505
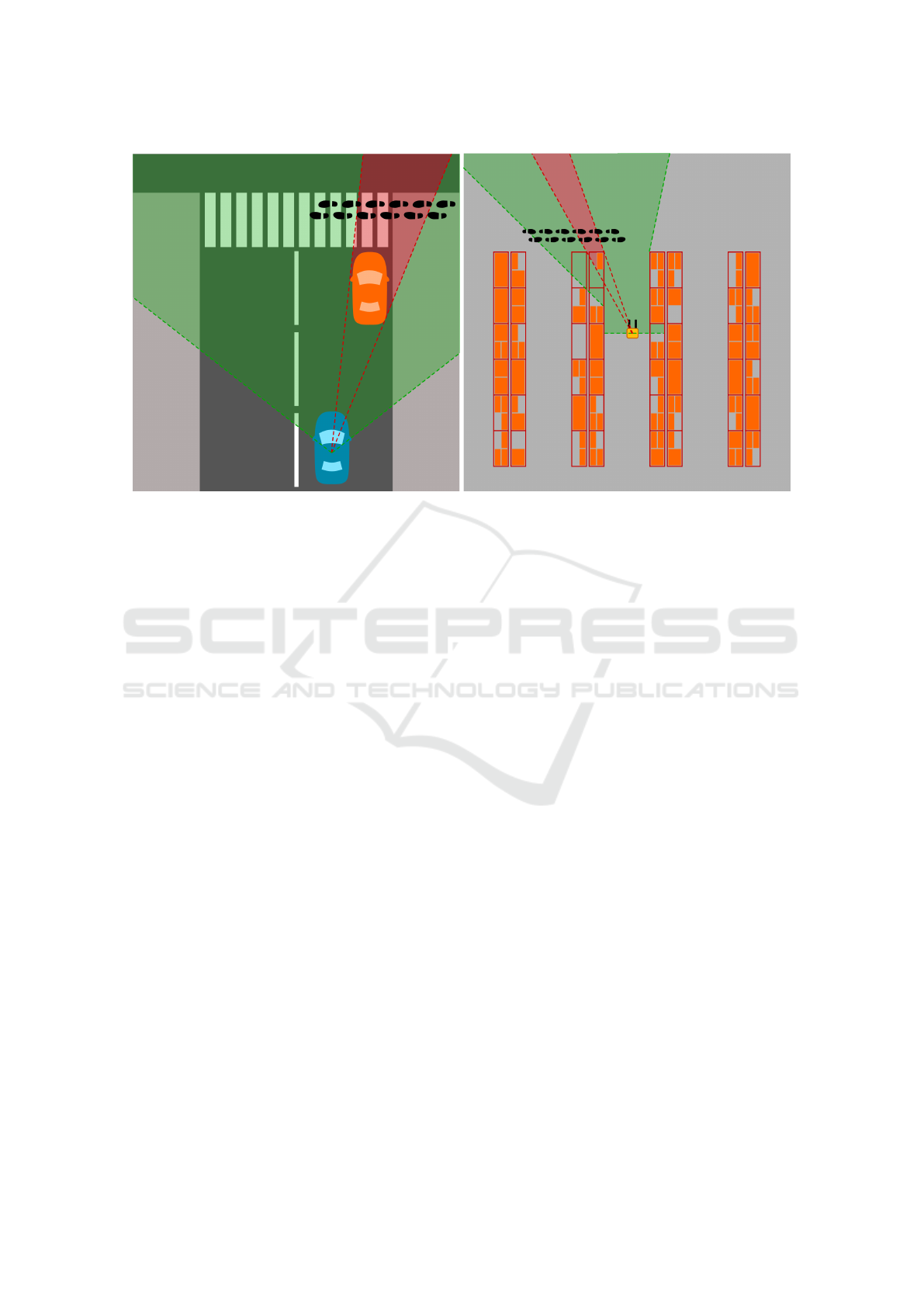
(a) occlusion in an urban scenario
(b) occlusion in a warehouse scenario
Figure 1: Two examples where the target (tracked object) disappears momentarily.
sification measures. The Kanade-Lucas-Tomasi al-
gorithm (Lucas et al., 1981), the mean-shift track-
ing algorithm (Comaniciu et al., 2003), Kalman Filter
(Fod et al., 2002), (Castro et al., 2004), (Xavier et al.,
2005), (Le Roux, 1960), and Extended Kalman Fil-
ter (EKF) (Grewal and Andrews, ), (Kalman, 1960),
(Welch and Bishop, 2004), (Kmiotek and Ruichek,
2008), (Rebai et al., 2009) are some examples of
deterministic methods. Stochastic methods on the
other hand usually optimize the objective function by
considering observations over multiple scans using a
Bayesian rule. It improves robustness over determin-
istic methods. The condensation algorithm (Isard and
Blake, 1998) and Particle Filters (PF) (Schulz et al.,
2001), (Thrun et al., 2005), (Almeida et al., 2005),
(Br
¨
aunl, 2008), (Arras and Mozos, 2009) are some
examples of stochastic approaches.
Observability of the target has often been an
underlying assumption in the formulation of human
tracking problem. Few has taken into account the
problem of partially occluded targets (Arras et al.,
2008), (Leigh et al., 2015), but not the problem
of fully occluded target. Figure 1 demonstrates
two scenarios where the target disappears and
might reappear again from behind the obstacle. In
these examples the target momentarily becomes
hidden from the laser scanner due to obstacles in
between. If the autonomous vehicle (what we call
“agent”) is not capable of maintaining the hypoth-
esis associated with the to-be occluded target, the
probable reappearance event might surprise the agent.
Our Approach: In this paper we propose a novel
approach for human (“target”) tracking under occlu-
sion. Our heuristic method relies on the common-
sense knowledge that the trajectory of any physical
entity in the spatio-temporal domain is continuous.
Detecting occluded regions caused by stationary ob-
jects, the method is enabled to associate an upcom-
ing occlusion event to a target. The time and location
of the reappearance event is estimated according to
the last observed velocity and direction of the target,
and the relative location between the agent, occluding
obstacle and the target. Awareness of the upcoming
occlusion event provides a probabilistic insight to the
future state of the target, improving the data associa-
tion between observation of the reappeared target and
the agent’s hypothesis of target’s state. Our approach
enables the agent to detect the occlusion event, and
the upcoming reappearance event more reliably, and
consequently would improve decisions towards safe
operation, on adaptive path planning to avoid colli-
sion.
In the rest of this paper, we review the architec-
ture of a DTMO system in section 2. This section also
contains a full description of our proposed method in
details, along with its integration with an EKF algo-
rithm. The performance of our proposal is evaluated
in section 3 through a series of real-world experiments
with different setups. In the last section, we conclude
the paper by reviewing the advantages and limitations
of our method, and presenting our plans for future
works.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
506
2 APPROACH
A general DTMO system for human detection and
tracking procedure is composed of several sequen-
tial steps: i) segmentation of objects; ii) modeling
of the objects; iii) human detection; iv) pose estima-
tion; and v) associating a hypothesis to each target’s
state and tracking the hypothesis . The first step is
the segmentation of the sensor’s measurement into a
set of objects based on the connectivity of data points
(Castro et al., 2004), (Xavier et al., 2005), (Preme-
bida and Nunes, 2005). Segmentation step is followed
by modeling each distinct object with a geometrical
model of line or circle. In order to identify potential
targets (i.e. humans) we take two criteria into con-
sideration. i) size; and ii) motion . The length of
the lines, or diameter of the circles denote the size of
the objects. Small objects with a length less than an
empirical threshold (50
cm
) are classified as potential
targets (i.e. humans leg). If two legs are close enough
to each other (less than 40
cm
), they are grouped into a
single target. The position of the human body is then
calculated based on the mean value of center of grav-
ity of each leg. Additionally, we consider the motion
of the potential targets to distinguish between station-
ary and moving objects. Motion of each object is esti-
mated over consecutive frames of measurement. As-
sociating a hypothesis with target’s state, and tracking
the hypothesis through observation, makes it possible
to predict the next position of the target and conse-
quently to alleviate the consequence of occlusion.
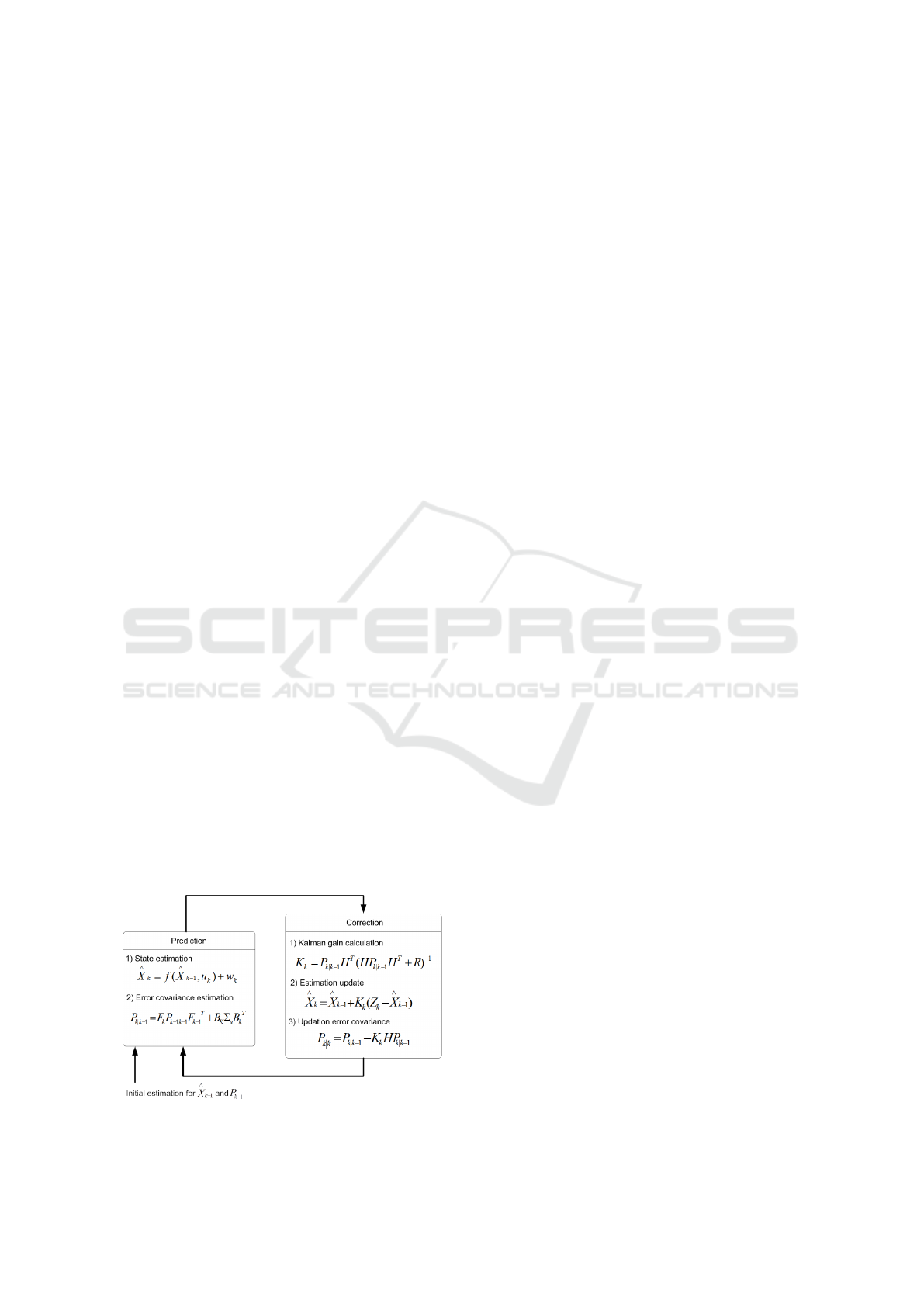
The most common approach for tracking problem
is Kalman filter, and in nonlinear situations EKF. The
general procedure of EKF tracking is illustrated in
Figure 2. EKF procedure starts by associating each
target with one single modal hypothesis of the state
of that target. In other words, the hypothesis is the
agent’s “belief” of the target’s state. The state in-
cludes the pose and velocity of the target. Each hy-
pothesis contains an uncertainty denoted by a covari-
ance matrix. The uncertainty indicates how much the
Figure 2: Extended Kalman Filter.
agent is sure of the target’s state. Based on the mo-
tion model and the hypothesis, EKF predicts the next
state of the target. The EKF updates the hypothesis
with new sensor measurments /or/ observations, and
consequently decreases the uncertainty.
2.1 Hypothesis Tracking in Occlusion
The challenge rises when the agent can not observe
the target (loses visibility) and therefore is unable to
update its hypothesis. Increase of uncertainty over the
iterations of prediction stage without updating cycles
is the consequence of the occlusion (see figure 3b).
The increased in uncertainty makes it impossible for
the agent to recover its hypothesis even after the reap-
pearance of the target. That is to say, the agent would
not be able to associate the new observations of the
reappeared target with the existing, but highly uncer-
tain hypothesis. More importantly the agent would
become less aware of the target’s location as the time
passes.
Here we propose an approach to maintain the
hypothesis associated with occluded target, so that
the agent would become aware of the upcoming
reappearance event. The novelty in this work is a
heuristic assumption that our method relies on, and
it is based on the continuity of target’s trajectory
in the spatio-temporal domain. In this case, if an
object becomes invisible by an observer, it is out of
sight or occluded, but does not mean it disappeared
to “nowhere”. By formulating the occlusion event
and its consequences in terms of observations,, our
approach enables the agent to detect the occlusion
event, and consequently handle the upcoming reap-
pearance event more reliably.
Occluded Region: Every stationary object is
counted as an obstacle which can cause an occluded
region. Each occluded region is bounded by the
causing obstacle, the lines of sight from the agent,
and the range of sensor (see figure 3a). Note that
in the result section, we only highlight the potential
candidate among all the occluded regions where the
target is about to hide in that region.
Hypothesis Tracking: The tracking algorithm
is modified to update the hidden target’s state (i.e.
pose = (x, y, θ)) based on the last observed direction
and velocity of the target. Instead of expanding the
uncertainty region associated with the state of the
hidden target in every direction (default in EKF),
the modified updating procedure would increase the
uncertainty along the line of sight (see figures 3b
and 3c). The imposed restriction on the uncertainty
Human Tracking in Occlusion based on Reappearance Event Estimation
507

(a) occlusion and events
(b) default prediction
(c) modified prediction
Figure 3: In this illustration we present an occlusion scenario in detail. Figure 3a show the relative locations of the agent,
target and the occluding obstacle. The concepts of “occluded region” and “lines of sight” are also described. Figure 3b and
3c represent the difference between the default hypothesis tracking of the EKF and our proposed method.
update improves the agent’s ability to associate the
target at reappearance with its existing hypothesis.
This in turn provides the agent with more knowledge
of its surrounding (i.e. occluded targets) that would
improve decisions on path planning, and obstacle
avoidance if required. In addition, the modification
does not demand any extra computation.
Bounding Hypothesis Location: We pose a con-
straint over the estimated position of the occluded tar-
get. The bound to this constraint is the estimated reap-
pearance location on the line of sight (see figure 3a).
This is also motivated by the continuity of the target’s
trajectory in spatio-temporal domain. In other words,
the target is not expected to appear anywhere far from
the line of sight. We do not address the possibility of
drastic changes of the motion model (i.e velocity and
trajectory) in this paper.
In this case the covariance matrix R (in the cor-
rection phase of EKF) is modified to R
h
based on the
bounding hypothesis and is expanded on the line of
sight (see figure 3a) according to the following for-
mulas.
R
h
= Rot(θ) ·
σ
2
x
σ
x
σ
y
σ
x
σ
y
σ
2
y
Rot(θ) =
cos(θ) −sin(θ)
sin(θ) cos(θ)
θ = arctan(
y
obstacle
− y
agent
x
obstacle
− x
agent
)
, where σ
x
= λ · σ
y
, λ > 1 and varies depending on
the distance between the agent and the target.
Hypothesis Rejection: when should the agent
reject the hypothesis associated with a hidden target?
We consider two criteria to reject a hypothesis:
i) when the agent moves and the estimated trajectory
of the target in the occluded region becomes visible;
and ii) an upper bound in time (t
hr
), relative to the
estimated occlusion period (see figure 4). The hy-
pothesis rejection time is dependent on the estimation
of reappearance event. The estimated reappearance
event in turn is adaptive to the relative pose of the
agent and the obstacle. Consequently, we can assume
that the first criterion for rejecting the hypothesis will
be included in the second criterion.
Alert Signal: Furthermore, for a more reliable
behavior, we estimate the location and the time of
reappearance event for the hidden target. This esti-
mation is associated with an alert signal which warns
the agent of the reappearance event beforehand. The
signal is defined as:
Alert
a
(t) =
t
t
r
−t
o
t
o
< t < t
r
1 t
r
< t < t
hr
0 otherwise
3 EXPERIMENTS AND RESULTS
To evaluate the performance of our proposed ap-
proach, several experiments with multiple moving
objects in different situations are performed. Even
though the experiments are done from a stationary
agent’s sensor perspective, the proposed method of
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
508
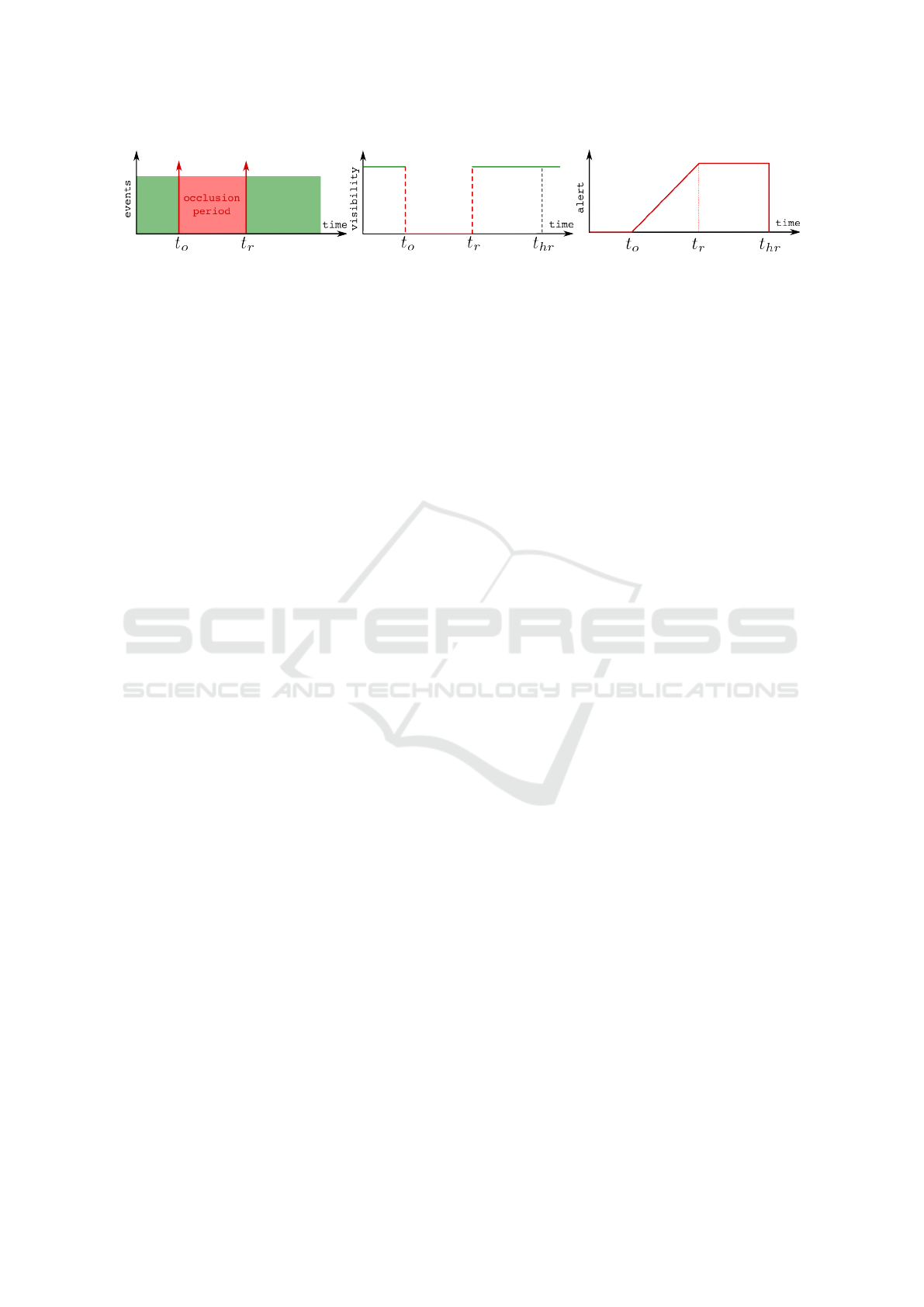
(a) events of interest
(b) visibility of the target
(c) the alert signal
Figure 4: A temporal analysis of the occlusion scenario is provided in this figure. In (a) two events of occlusion and reap-
pearance are presented by upward arrows. t
o
is the time of occlusion, t
r
is the estimated time of reappearance, and t
hr
is the
time of hypothesis rejection. (b) shows the visibility of the target from the agents point of view with respect to time. And (c)
illustrates the proposed “alert signal” that could be used for a cautious behavior planning of the autonomous vehicle.
this paper is intended to be employed by mobile
agents. The conversion between the two cases could
be simply done by the conversion of observations
from an ego-centric to world-centric reference frame.
The experiments have been done at Halmstad Univer-
sity Laboratory. The laser scanner (SICK S300) is
mounted at the height about 30
cm
above the ground
and two obstacles are placed in the sensor’s field of
view.
In the first experiment, a person is moving in the
sensor’s field of view and walking behind an obstacle.
Two examples of applying our approach in this setup
are shown in figure 5a and figure 5b.
In the second setup two people are moving in the
field. In the case of having multiple targets, one target
might be occluded by the other target. Such occlusion
is known as partially occluded situation in the track-
ing and detection domain. Therefore, in these exper-
iments the target might become hidden partly (by the
other target) or fully (by an obstacle) from the laser
scanner. Figures 5c and 5d show successful track-
ing results applying our approach under these circum-
stances.
In the next experiment, a more complex situation
is investigated, where multiple people are walking in
the sensor’s field of view. Figure 5e shows an exam-
ple of three people walking in the environment. The
results verify how efficient our approach can handle
human tracking in occlusion situation.
Last experiment is devoted to one of the most
challenging situation in which two targets are ap-
proaching to each other, and the meeting point is
hidden behind an obstacle. In fact they are passing
each other while they are hidden by an obstacle,
so the sensor does not receive any measurement to
update its hypotheses. The question is whether the
approach can correctly continue tracking the targets
after reappearing, and be able to associate them with
the correct hypothesis. The result shows in figure 5f
and verifies that both targets are correctly tracked as
they reappear from behind the obstacle.
In the classic EKF tracking, when the target is hid-
den for a certain time, the uncertainty area of the oc-
cluded target will be increased at each scan. This will
result in a drastic drop of certainty before the target
reappears from behind the obstacle, and consequently
it is nearly impossible for the system to recover. In
addition, any change in the targets velocity would re-
sult in a mismatch between the targets location and
the hypothesis. In such cases even if the uncertainty
is not too high, the association would fail due to the
mismatch between target’s real location and the hy-
pothesis.
Our proposed approach would not fall into the
same pitfall since the hypothesis will not be expanded
like classical EKF. Instead the hypothesis is adjusted,
with an increased uncertainty but only in the direction
of the sensor’s line of sight. Furthermore according to
the aforementioned heuristic (trajectory continuity in
the spatio-temporal domain), the location of the hy-
pothesis is adjust to where the object is estimated to
reappear. This improves the ability of the intelligent
vehicle to associate the person at reappearance with
its existing hypothesis.
4 CONCLUSION
In an environment shared between humans and au-
tonomous vehicles, detection and tracking of moving
objects is one of the most crucial requirements for
safe path planning (i.e. collision avoidance). This
challenge becomes more of a concern when a moving
object hides momentarily behind an obstacle. We
tackled this problem by proposing a novel approach in
maintaining hypotheses in occlusion. Our approach
detects the occlusion event, predicts the reappearance
event both in time and location. Relying on these
information, the agent is enabled to maintain the state
hypothesis of the occluded target. Consequently the
agent becomes aware of the upcoming reappearance
and can take appropriate action to avoid hazards. The
performance of the approach is evaluated through a
series of real-world experiments. The experiments
Human Tracking in Occlusion based on Reappearance Event Estimation
509
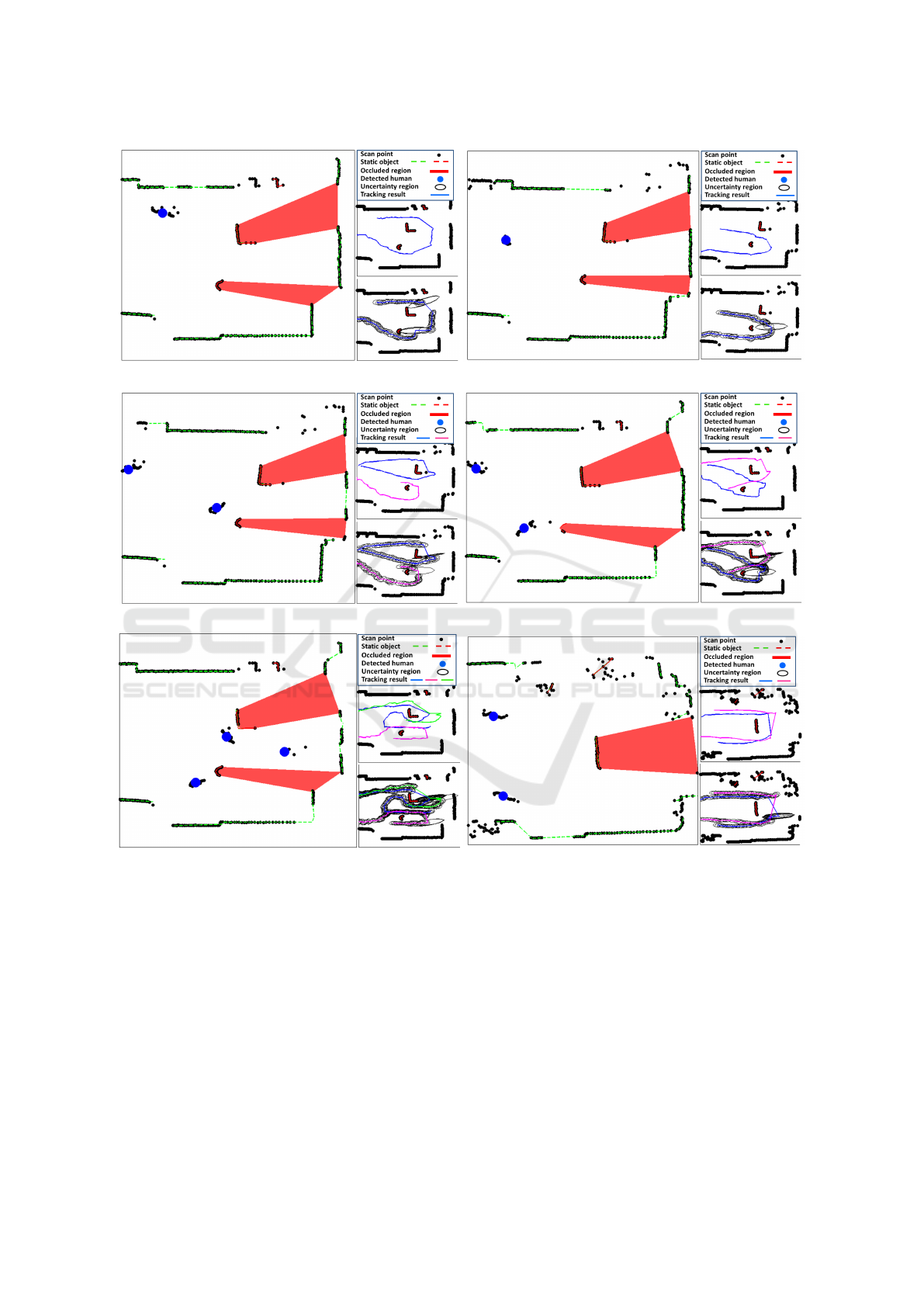
(a) One moving human and two obstacles
(b) One moving human and two obstacles
(c) Two moving humans and two obstacles
(d) Two moving humans and two obstacles
(e) Multiple moving humans and two obstacles
(f) Two moving humans and one obstacle
Figure 5: In each sub-figure, the laser scanner’s field of view with the result of object segmentation and modeling are shown
in the left hand side (single bigger image) The tracking results based on the proposed method are shown in the right hand plots
in a column of two plots, the bottom one also shows the uncertainties associated with hypotheses. Black dots are the scan
point, dash red and green lines are static objects, red area is the occluded region, blue circle is the estimated human position,
black ellipse are the uncertainty regions for each scan, and the blue, cyan, and green lines are the tracking results.
vary in environment configuration, number of targets
and their trajectories. Our proposed approach can
handle human tracking in occlusion situation in a
more efficient way compared to classical EKF. It does
not require additional computational power, which
makes it faster than PF, specially in crowded envi-
ronment with multiple targets. Due to the confined
space of the common robotic labs, our experimental
result could not reflect the ability to tackle the
problem in case of a moving agent. Nevertheless
our proposed approach can be used by moving
agents, using a conversion of observation from the
ego-centric to world-centric frame of reference.
A video compilation of the results is available at
https://www.youtube.com/watch?v=16TyoN-LxzA.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
510

Prospective: In the future works we plan to im-
prove our target tracking systems from different per-
spective. We plan to employ more advanced tech-
niques in estimating the trajectory of the hidden tar-
get, instead of the straight line trajectory assumption.
In addition we will integrate a mutation based trajec-
tory bifurcation to expand the hypothesis over a trel-
lis to account for the possible radical changes in the
trajectory of the target. Furthermore we plan to im-
plement a more comprehensive system, composed of
different sensory modalities, so that the data associa-
tion could benefit from visual cues. The continuation
of this work will be evaluated over more experimental
results, that we plan to carry out in a real warehouse
environment.
REFERENCES
Almeida, A., Almeida, J., and Ara
´
ujo, R. (2005). Real-
time tracking of multiple moving objects using par-
ticle filters and probabilistic data association. AU-
TOMATIKA:
ˇ
casopis za automatiku, mjerenje, elek-
troniku, ra
ˇ
cunarstvo i komunikacije, 46(1-2):39–48.
Arras, K. O., Grzonka, S., Luber, M., and Burgard, W.
(2008). Efficient people tracking in laser range data
using a multi-hypothesis leg-tracker with adaptive oc-
clusion probabilities. In Robotics and Automation,
2008. ICRA 2008. IEEE International Conference on,
pages 1710–1715. IEEE.
Arras, K. O. and Mozos, O. M. (2009). People detection
and tracking.
Arras, K. O., Mozos,
´
O. M., and Burgard, W. (2007). Us-
ing boosted features for the detection of people in
2D range data. In Robotics and Automation, 2007
IEEE International Conference on, pages 3402–3407.
IEEE.
Br
¨
aunl, T. (2008). Embedded robotics: mobile robot design
and applications with embedded systems. Springer
Science & Business Media.
Carballo, A., Ohya, A., and Yuta, S. (2009). Multiple peo-
ple detection from a mobile robot using double lay-
ered laser range finders. In ICRA Workshop.
Castro, D., Nunes, U., and Ruano, A. (2004). Feature ex-
traction for moving objects tracking system in indoor
environments. In Proc. 5th IFAC/euron Symposium on
Intelligent Autonomous Vehicles. Citeseer.
Comaniciu, D., Ramesh, V., and Meer, P. (2003). Kernel-
based object tracking. Pattern Analysis and Machine
Intelligence, IEEE Transactions on, 25(5):564–577.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Computer Vision and
Pattern Recognition, 2005. CVPR 2005. IEEE Com-
puter Society Conference on, volume 1, pages 886–
893. IEEE.
Fod, A., Howard, A., and Mataric, M. J. (2002). A
laser-based people tracker. In Robotics and Automa-
tion, 2002. Proceedings. ICRA’02. IEEE International
Conference on, volume 3, pages 3024–3029. IEEE.
Grewal, M. S. and Andrews, A. P. Kalman filtering: theory
and practice, 1993.
Isard, M. and Blake, A. (1998). Condensationconditional
density propagation for visual tracking. International
journal of computer vision, 29(1):5–28.
Kalman, R. E. (1960). A new approach to linear filtering
and prediction problems. Journal of basic Engineer-
ing, 82(1):35–45.
Kmiotek, P. and Ruichek, Y. (2008). Representing and
tracking of dynamics objects using oriented bound-
ing box and extended kalman filter. In Intelligent
Transportation Systems, 2008. ITSC 2008. 11th Inter-
national IEEE Conference on, pages 322–328. IEEE.
Le Roux, J. (1960). An introduction to kalman filtering:
Probabilistic and deterministic approaches. ASME J.
Basic Engineering, 82:34–45.
Leigh, A., Pineau, J., Olmedo, N., and Zhang, H. (2015).
Person tracking and following with 2D laser scanners.
In Robotics and Automation (ICRA), 2015 IEEE Inter-
national Conference on, pages 726–733. IEEE.
Linder, T. and Arras, K. O. (2016). People detection, track-
ing and visualization using ROS on a mobile service
robot. In Robot Operating System (ROS), pages 187–
213. Springer.
Lovas, T. and Barsi, A. (2015). Pedestrian detection by pro-
file laser scanning. In Models and Technologies for
Intelligent Transportation Systems (MT-ITS), 2015 In-
ternational Conference on, pages 408–412. IEEE.
Lucas, B. D., Kanade, T., et al. (1981). An iterative image
registration technique with an application to stereo vi-
sion. In IJCAI, volume 81, pages 674–679.
Mozos, O. M., Kurazume, R., and Hasegawa, T. (2010).
Multi-part people detection using 2D range data. In-
ternational Journal of Social Robotics, 2(1):31–40.
Nemati, H. and
˚
Astrand, B. (2014). Tracking of people
in paper mill warehouse using laser range sensor. In
Modelling Symposium (EMS), 2014 European, pages
52–57. IEEE.
Papageorgiou, C. and Poggio, T. (2000). A trainable system
for object detection. International Journal of Com-
puter Vision, 38(1):15–33.
Premebida, C. and Nunes, U. (2005). Segmentation and ge-
ometric primitives extraction from 2D laser range data
for mobile robot applications. Robotica, 2005:17–25.
Rebai, K., Benabderrahmane, A., Azouaoui, O., and
Ouadah, N. (2009). Moving obstacles detection
and tracking with laser range finder. In Advanced
Robotics, 2009. ICAR 2009. International Conference
on, pages 1–6. IEEE.
Schiele, B., Andriluka, M., Majer, N., Roth, S., and Wojek,
C. (2009). Visual people detection: Different mod-
els, comparison and discussion. In IEEE International
Conference on Robotics and Automation.
Schulz, D., Burgard, W., Fox, D., and Cremers, A. B.
(2001). Tracking multiple moving targets with a mo-
bile robot using particle filters and statistical data as-
sociation. In Robotics and Automation, 2001. Pro-
Human Tracking in Occlusion based on Reappearance Event Estimation
511

ceedings 2001 ICRA. IEEE International Conference
on, volume 2, pages 1665–1670. IEEE.
Thrun, S., Burgard, W., and Fox, D. (2005). Probabilistic
robotics. MIT press.
Tuzel, O., Porikli, F., and Meer, P. (2007). Human de-
tection via classification on riemannian manifolds.
In Computer Vision and Pattern Recognition, 2007.
CVPR’07. IEEE Conference on, pages 1–8. IEEE.
Wang, C.-C. and Thorpe, C. (2002). Simultaneous localiza-
tion and mapping with detection and tracking of mov-
ing objects. In Robotics and Automation, 2002. Pro-
ceedings. ICRA’02. IEEE International Conference
on, volume 3, pages 2918–2924. IEEE.
Welch, G. and Bishop, G. (2004). An introduction to the
kalman filter. university of north carolina at chapel
hill, department of computer science. Technical re-
port, TR 95-041.
Xavier, J., Pacheco, M., Castro, D., Ruano, A., and Nunes,
U. (2005). Fast line, arc/circle and leg detection from
laser scan data in a player driver. In Robotics and Au-
tomation, 2005. ICRA 2005. Proceedings of the 2005
IEEE International Conference on, pages 3930–3935.
IEEE.
Zitouni, M. S., Dias, J., Al-Mualla, M., and Bhaskar, H.
(2015). Hierarchical crowd detection and represen-
tation for big data analytics in visual surveillance. In
Systems, Man, and Cybernetics (SMC), 2015 IEEE In-
ternational Conference on, pages 1827–1832. IEEE.
Zivkovic, Z. and Krose, B. (2007). Part based people de-
tection using 2D range data and images. In Intelligent
Robots and Systems, 2007. IROS 2007. IEEE/RSJ In-
ternational Conference on, pages 214–219. IEEE.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
512
