
Particle Convergence Expected Time in The PSO Model with Inertia
Weight
Krzysztof Trojanowski and Tomasz Kulpa
Cardinal Stefan Wyszy
´
nski University, Faculty of Mathematics and Natural Sciences, Warsaw, Poland
Keywords:
Particle Swarm with Inertia Weight, Particle Location Convergence Expected Time, Location Variance
Convergence Expected Time.
Abstract:
Theoretical properties of particle swarm optimization approach with inertia weight are investigated. Particu-
larly, we focus on the convergence analysis of the expected value of the particle location and the variance of
the location. Four new measures of the expected particle convergence time are defined: (1) convergence of the
expected location of the particle, (2) the particle location variance convergence and (3-4) their respective weak
versions. For the first measure an explicit formula of its upper bound is also given. For the weak versions of
the measures graphs of recorded values are presented.
1 INTRODUCTION
Particle swarm optimization (PSO) is a stochastic
population-based search algorithm successfully ap-
plied in numerous real-world problems (Poli, 2008a;
Bonyadi and Michalewicz, 2016b). Usually, when
PSO is implemented some drawbacks or limitations
can be observed. They can be divided into two
main groups: related to transformation invariance and
to convergence (Bonyadi and Michalewicz, 2016b).
The latter group concerns problems with stability and
local convergence of a swarm, patterns of particle
movements, and first hitting time. All of them were a
subject of theoretical analysis.
Phenomenon of uncontrolled growth of particle
velocities for some values of velocity equation co-
efficients was one of the first identified limitation of
PSO. Obtaining a non divergent behavior of a swarm
needed to identify boundaries for a so called conver-
gence region of safe coefficients values. Even for the
PSO configuration from this region there appeared a
problem of swarm stagnation. This is a case when
swarm obtains its equilibrium state and converges to
a point which is, however, not a local optimum.
Another issue concerning effectiveness of the
search process are the patterns of particle movements.
For velocity equation coefficients from the conver-
gence region one can observe different patterns of par-
ticles paths. Depending on the optimized function dif-
ferent configurations prove to be the most efficient.
However, there exist coefficients settings commonly
regarded as a ”good starting point” of PSO configura-
tion tuning for selected classes of problems.
In the case of the PSO first hitting time issue, the
subject of interest is the time (precisely, a number of
evaluation function calls) necessary to obtain satisfac-
tory solution. Due to stochastic nature of PSO an ex-
pected runtime of the algorithm is rather investigated.
In the presented research we focus on this very aspect
of the theoretical analysis. New definitions of parti-
cle convergence in the stochastic model of the particle
movement are proposed and estimations of the num-
ber of steps necessary for the particle to obtain the
stability state are presented.
The paper consists of six sections. In Section 2
a brief review of selected areas of PSO theoretical
analysis can be found, that is, analysis concerning (1)
stability and region of stable particle parameter con-
figurations and (2) runtime analysis, particularly, esti-
mation of times necessary to hit a staisfying solution.
In Section 3 the stochastic model of the particle move-
ment is presented. Section 4 introduces definitions of
particle convergence expected time (pcet) and particle
weak convergence expected time (pwcet). Section 5
focuses on the convergence of particle location vari-
ance and introduces next two definitions of the par-
ticle location variance convergence time pvct(δ) and
its weak version. Section 6 concludes the paper.
Trojanowski, K. and Kulpa, T.
Particle Convergence Expected Time in The PSO Model with Inertia Weight.
DOI: 10.5220/0006048700690077
In Proceedings of the 8th International Joint Conference on Computational Intelligence (IJCCI 2016) - Volume 1: ECTA, pages 69-77
ISBN: 978-989-758-201-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
69

2 RELATED WORK
The PSO model with inertia weight implements fol-
lowing velocity and position equations:
v
t+1
= w · v
t
+ ϕ
t,1
⊗ (y
t
− x
t
) + ϕ
t,2
⊗ (y
∗
t
− x
t
),
x
t+1
= x
t
+ v
t+1
(1)
where v
t
is a particle’s velocity, x
t
— particle’s lo-
cation, y
t
— the best location the particle has found
so far, y
∗
t
— the best location found by particles in
its neighborhood, w – inertia coefficient, ϕ
t,1
and
ϕ
t,2
control influence of the attractors on the veloc-
ity, ϕ
t,1
= R
t,1
c
1
, ϕ
t,2
= R
t,2
c
2
, and c
1
,c
2
represent
acceleration coefficients, R
t,1
,R
t,2
are two vectors of
random values uniformly generated in range [0,1] and
⊗ denotes pointwise vector product. Values of coef-
ficients w, c
1
and c
2
define convergence properties of
the particle.
2.1 Stability and Stable Regions
In (Cleghorn and Engelbrecht, 2015) assumptions ac-
companying theoretical PSO research can be classi-
fied into the following four: (1) deterministic assump-
tion, where ϕ
1
= ϕ
t,1
and ϕ
2
= ϕ
t,2
, for all t, (2)
stagnation assumption, where y
t
= y and y
∗
t
= y
∗
, for
all t sufficiently large, (3) weak chaotic assumption,
where both y
t
and y
∗
t
will occupy an arbitrarily large
but finite number of unique position, and (4) weak
stagnation assumption, where the global attractor of
the particle that has obtained the best objective func-
tion evaluation remains constant for all t sufficiently
large. Under the deterministic assumption the follow-
ing region of particle convergence was derived ((Tre-
lea, 2003; van den Bergh and Engelbrecht, 2006)):
0 < ϕ
1
+ ϕ
2
< 2(1 + w),
0 < w < 1, ϕ
1
> 0 ∧ ϕ
2
> 0
(2)
and the stability is defined as lim
t→∞
x
t
= y.
To deal with randomness of ϕ
t,1
and ϕ
t,2
they
are replaced with their expectations c
1
/2 and c
2
/2
respectively. In this case stability is defined as
lim
t→∞
E|x
t
| = y ((Poli, 2009)) and is called the order-
1 stability. The region defined with Ineq. (2) satisfies
this stability, thus, it is also called the order-1 stable
region. In later publications (e.g. (Cleghorn and En-
gelbrecht, 2014; Bonyadi and Michalewicz, 2016a;
Liu, 2015)) the region is extended to |w| < 1 and
0 < ϕ
1
+ ϕ
2
< 2(1 + w).
Unfortunately, the order-1 stability is not enough
to ensure convergence, simply the particle may oscil-
late or even diverge and the expectation converges to
a point. The convergence of the variance (or stan-
dard deviation) is also necessary, which is called
the order-2 stability condition ((Jiang et al., 2007;
Poli, 2009)). In (Jiang et al., 2007) the stabil-
ity is defined as lim
t→∞
E[x
t
− y]
2
= 0 where y =
lim
t→∞
E[x
t
]. In (Poli, 2009) the stability is defined as
lim
t→∞
E[x
2
t
] = β
0
and lim
t→∞
E[x
t
x
t−1
] = β
1
where
β
0
and β
1
are constant. Eventually, both authors ob-
tain the same set of inequalities which define the so
called order-2 stable region:
ϕ <
12(1 − w
2
)
7 − 5w
where ϕ
1
= ϕ
2
= ϕ. (3)
2.2 Runtime Analysis
For applications of PSO for real-world problems it
is important to estimate when a swarm or a parti-
cle reaches close vicinity of the optimum. Need for
analysis of this problem appeared in (Witt, 2009) and
in (Lehre and Witt, 2013) authors introduced for-
mal definition of the first hitting time (FHT) and ex-
pected FHT (EFHT). Both concepts refer to an en-
tire swarm, precisely, FHT represents the number of
times the evaluation function f
eval
is called until the
swarm for the first time contains a particle x for which
| f
eval
(x) − f
eval
(y
∗
)| < δ.
Another approach can be found in (Trojanowski
and Kulpa, 2015), where subsequent locations of par-
ticles are a subject of analysis. Authors proposed
a concept of particle convergence time (pct) as a
measure of speed at which the equilibrium state is
reached. In this case the ”equilibrium state” is the
state when the distance between current and the next
location of the particle is never greater than the given
threshold value δ. Authors assumed that the global
attractor remains unchanged (the so-called stagnation
assumption), that is, the value of global attractor is
never worse than the value of any location visited
during the convergence process. This means that the
shape of evaluation function f
eval
is negligible as far
as this condition is satisfied.
Definition 2.1 (The particle convergence time). Let
δ be a given positive number and S(δ) be a set of nat-
ural numbers such that:
s ∈ S(δ) ⇐⇒ ||x
t+1
− x
t
|| < δ for all t ≥ s. (4)
The particle convergence time (pct(δ)) is the minimal
number in the set S(δ), that is
pct(δ) = min{s ∈ S(δ)}. (5)
Under the deterministic and stagnation assump-
tions, and also the best particle stagnation assumption
(that is, y
t
= y
∗
t
= y), the explicit version of an upper
bound formula of (pct), that is, pctb(δ) is given ((Tro-
janowski and Kulpa, 2015)).
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
70

3 THE STOCHASTIC MODEL
Under the best particle stagnation assumption the
update equation of the particle location in one-
dimensional search space can be reformulated as fol-
lows:
x
t+1
= (1 + w − φ
t
)x
t
− wx
t−1
+ φ
t
y, (6)
where w is a constant parameter of inertia and φ
t
is
the sum of two independent random variates, φ
t
=
ϕ
t,1
+ ϕ
t,2
, ϕ
t,i
∼ U(0, c
i
), i = 1,2. It is also assumed
that φ
t
, t = 1,2,3 ... are independent and identically
distributed.
Thus, in the further evaluations E[φ
t
] and E[φ
2
t
]
equal
E[φ
t
] =E[φ
t,1
] + E[φ
t,2
] =
c
1
+ c
2
2
E[φ
2
t
] =Var[φ
t
] + (E[φ])
2
=
c
2
1
12
+
c
2
2
12
+
c
1
+ c
2
2
2
Set e
t
= E[x
t
], m
t
= E[x
2
t
], h
t
= E[x
t
x
t−1
], f =
E[φ
t
] and g=E[φ
2
t
].
The proposed model is a simplified version of the
model presented in (Poli and Broomhead, 2007; Poli,
2008b; Poli, 2009), particularly, we apply the same
analysis of dynamics of first and second moments of
the PSO sampling distribution.
We apply the expectation operator to both sides
of Eq. (6). Because of the statistical independence
between φ
t
and x
t
we obtain
e
t+1
= (1 + w − f )e
t
− we
t−1
+ f y. (7)
Eq. (7) gives us the same model as the model de-
scribed by Eq. (6), however, instead of the acceler-
ation coefficient φ
t
we have its expected value f and
instead of the particle location x
t
we have particle ex-
pected location e
t
. We can say that the update of ex-
pected position of a particle follows in the same way
as the particle trajectory in the deterministic model
described by Eq. (6).
We raise both sides of Eq. (6) to the second power
and obtain
x
2
t+1
=(1 + w − φ
t
)
2
x
2
t
+ w
2
x
2
t−1
+ φ
2
t
y
2
− 2(1 + w − φ
t
)wx
t
x
t−1
− 2wyφ
t
x
t−1
+ 2yφ
t
(1 + w − φ
t
)x
t
(8)
Applying the expectation operator to both sides of
Eq. (8) and again because of the statistical indepen-
dence between φ
t
, x
t
and x
t−1
we obtain
m
t+1
=m
t
((1 + w)
2
− 2(1 + w) f + g)
+ m
t−1
w
2
− h
t
2w(1 + w − f )
+ e
t
2y( f (1 + w) − g)
− e
t−1
2wy f +y
2
g
(9)
Multiplying both sides of Eq. (6) by x
t
we get
x
t+1
x
t
= (1 + w − φ
t
)x
2
t
− wx
t
x
t−1
+ φ
t
yx
t
(10)
Again, we apply the expectation operator to (10)
and obtain
h
t+1
= (1 + w − f )m
t
− wh
t
+ f ye
t
(11)
Now, a vector z
t
= (e
t
,e
t−1
,m
t
,m
t−1
,h
t
)
T
can be
introduced. Equations (7), (9), and (11) can be rewrit-
ten as a matrix equation
z
t+1
= M
t
z
t
+ b (12)
where
M
t
=
m
1,1
−w 0 0 0
1 0 0 0 0
m
3,1
m
3,2
m
3,3
w
2
m
3,5
0 0 1 0 0
f y 0 m
5,3
0 −w
(13)
where the matrix components are
m
1,1
= 1 + w − f ,
m
3,1
= 2y( f (1 + w) − g),
m
3,2
= −2wy f ,
m
3,3
= (1 + w)
2
− 2(1 + w) f + g,
m
3,5
= −2w(1 +w − f ),
m
5,3
= 1 + w − f .
and
b = ( f y,0,y
2
g,0, 0)
T
(14)
The particle is order-2 stable if e
t
, m
t
, and h
t
con-
verge to to stable fixed points. This happens when all
absolute values of eigenvalues of M are less than 1.
In that case, there exist a fixed point of the system
described by equation
z
∗
= (I − M)
−1
b. (15)
When the system is order-2 stable, by the change
of variables u
t
= z
t
− z
∗
, we can rewrite Eq. (12)
u
t+1
= Mu
t
, (16)
which can be integrated to obtain the explicit formula
u
t
= M
t
u
0
. (17)
The order-2 analysis of the system described by
Eq. (17) is not easy because of complicated formulas
for eigenvalues of M. However, the order-1 analysis
can be done, because two of them are known as
λ
1
=
1 + w − f + γ
2
,
λ
2
=
1 + w − f − γ
2
,
(18)
where
γ =
q
(1 + w − f )
2
− 4w. (19)
Particle Convergence Expected Time in The PSO Model with Inertia Weight
71

For fixed initial values of e
0
and e
1
, the explicit for-
mula for e
t
, first time obtained by (van den Bergh and
Engelbrecht, 2006), is given by equation
e
t
= k
1
+ k
2
λ
t
1
+ k
3
λ
t
2
, (20)
where
k
1
= y,
k
2
=
λ
2
(e
0
− e
1
) − e
1
+ e
2
γ(λ
1
− 1)
,
k
3
=
λ
1
(e
1
− e
0
) + e
1
− e
2
γ(λ
2
− 1)
,
e
2
= (1 + w − f )e
1
− we
0
+ f y.
(21)
4 PARTICLE CONVERGENCE
EXPECTED TIME
Due to the analogy between the deterministic model
based on the update equation of the particle location
(6) and the studied order-1 stochastic model of PSO
described by Eq. (7) we can define a measure of par-
ticle convergence expected time (pcet) respectively to
the idea given in Def. (2.1),
Definition 4.1 (The particle convergence expected
time). Let δ be a given positive number and S(δ) be
a set of natural numbers such that:
s ∈ S(δ) ⇐⇒ |e
t+1
− e
t
| < δ for all t ≥ s. (22)
The particle convergence expected time (pcet(δ)) is
the minimal number in the set S(δ), that is
pcet(δ) = min{s ∈ S(δ)}. (23)
Briefly, the particle convergence expected time
pcet is the minimal number of steps necessary for the
expected particle location to obtain its stable state as
defined above.
The explicit formula for solutions of the recur-
rence Eq. (6) is given in (van den Bergh and Engel-
brecht, 2006). This formula was used in (Trojanowski
and Kulpa, 2015) to find an upper bound formula of
pct, that is, pctb(δ). Because of the analogy between
the models described by Eq. (6) and Eq. (7) we obtain
the following upper bound for pcet, namely pcetb
pcetb(δ) = max
lnδ − ln(2|k
2
||λ
1
− 1|)
ln|λ
1
|
,
lnδ − ln(2|k
3
||λ
2
− 1|)
ln|λ
2
|
(24)
for real value of γ given by (19) and
pcetb(δ) =
lnδ − ln(|λ
1
− 1|(|k
2
| + |k
3
|))
ln|λ
1
|
(25)
for imaginary value of γ, where λ
1
and λ
2
are given
by Eq. (18) and k
1
, k
2
and k
3
are given by Eq. (21).
Obviously, characteristics of pcetb(δ) depicted in
Fig. 1 (generated for δ = 0.0001) looks the same
as the characteristics of pctb (see (Trojanowski and
Kulpa, 2015) for comparisons) and have the same dis-
tinctive shape of a funnel. Thus, as in the case of pctb,
they can also be classified into four main types.
Empirical evaluation of pcet is difficult, so, we in-
troduce the less restrictive measure, that is, a particle
weak convergence time.
Definition 4.2 (The particle weak convergence ex-
pected time). Let δ be a given positive number. The
particle weak convergence expected time pwcet(δ) is
the minimal number of steps necessary to get the ex-
pected value of difference between subsequent parti-
cle locations lower than δ, that is
pwcet(δ) = min{t : |e
t
− e
t+1
| < δ}. (26)
It is obvious that pwcet(δ) ≤ pcet(δ) and equality
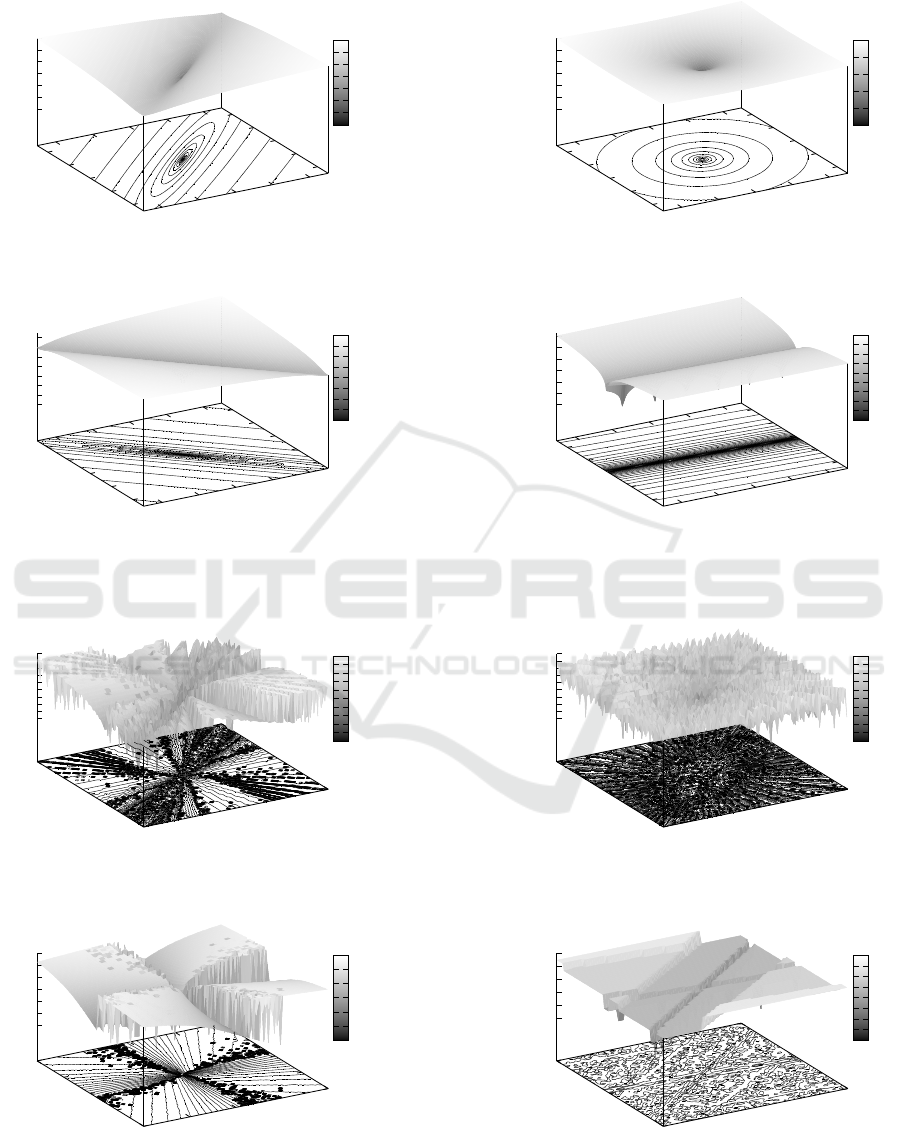
generally does not hold. Empirical characteristics of
pwcet are depicted in Fig. 2 and Fig. 3. The charac-
teristics were obtained with Algorithm 1.
Algorithm 1 : Particle weak convergence expected time
evaluation procedure.
1: Initialize: T
max
= 1e+5, two successive expected
locations e
0
and e
1
, and an attractor of a particle,
for example, y = 0.
2: s
1
= e
1
− e
0
3: f = (c
1
+ c
2
)/2
4: t = 1
5: repeat
6: e
t+1
= (1 + w − f )e
t
− we
t−1
+ f y
7: s
t+1
= e
t+1
− e
t
8: t = t + 1
9: until (s
t
> δ) ∧ (s
t
< 1e+10) ∧(t < T
max
)
10: if s
t
< 1e+10 then
11: return t
12: else
13: return T
max
14: end if
Fig. 2 depicts the values of pwcet generated for
δ = 0.0001 as a function of initial location and veloc-
ity represented by expected locations e
0
and e
1
where
E[φ
t
] and w are fixed. A grid of pairs [e
0
,e
1
] consists
of 40000 points (200 × 200) varying from -10 to 10
for both e
0
and e
1
.
Fig. 3 shows the values of pwcet also for δ =
0.0001 obtained for a grid of configurations (φ
max
,w)
starting from [φ
max
= 0.0, w = −1.0] and changing
with step 0.02 for w and step 0.04 for φ
max
(which
gave 200 × 100 points).
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
72
-8
-4
0
4
8
-8
-4
0
4
8
0
100
200
300
400
500
600
E[φ
t
]=0.06; w=0.96; y=0
e
0
e
1
250
300
350
400
450
500
550
600
(a) type A
-8
-4
0
4
8
-8
-4
0
4
8
0
100
200
300
400
500
600
E[φ
t
]=1.76; w=0.96; y=0
e
0
e
1
350
400
450
500
550
600
(b) type B
-8
-4
0
4
8
-8
-4
0
4
8
0
100
200
300
400
500
600
700
E[φ
t
]=3.91; w=0.96; y=0
e
0
e
1
350
400
450
500
550
600
650
700
750
(c) type C
-8
-4
0
4
8
-8
-4
0
4
8
0
200
400
600
800
1000
1200
E[φ
t
]=2.11; w=0.06; y=0
e
0
e
1
400
500
600
700
800
900
1000
1100
1200
1300
(d) type D
Figure 1: Graphs of pcetb(e
0
,e
1
) for selected configurations (E[φ
t
],w).
-10
-5
0
5
10
-10
-5
0
5
10
50
100
150
200
250
300
350
400
450
500
E[φ
t
]=0.06; w=0.96; y=0
e
0
e
1
0
50
100
150
200
250
300
350
400
450
500
(a) type A
-10
-5
0
5
10
-10
-5
0
5
10
50
100
150
200
250
300
350
400
450
500
E[φ
t
]=1.76; w=0.96; y=0
e
0
e
1
0
50
100
150
200
250
300
350
400
450
500
(b) type B
-10
-5
0
5
10
-10
-5
0
5
10
0
100
200
300
400
500
600
E[φ
t
]=3.91; w=0.96; y=0
e
0
e
1
0
100
200
300
400
500
600
(c) type C
-10
-5
0
5
10
-10
-5
0
5
10
2
4
6
8
10
12
E[φ
t
]=2.11; w=0.06; y=0
e
0
e
1
4
5
6
7
8
9
10
11
12
(d) type D
Figure 2: Graphs of recorded values of pwcet(e
0
,e
1
) for selected configurations (E[φ
t
],w).
Particle Convergence Expected Time in The PSO Model with Inertia Weight
73

0
1
2
3
4
5
6
7
8
-1
-0.5
0
0.5
1
1
10
100
1000
10000
100000
E[φ
t
]
w
0
10000
20000
30000
40000
50000
60000
70000
80000
90000
100000
110000
0 1 2 3 4 5 6 7 8
E[φ
t
]
-1
-0.5
0
0.5
1
w
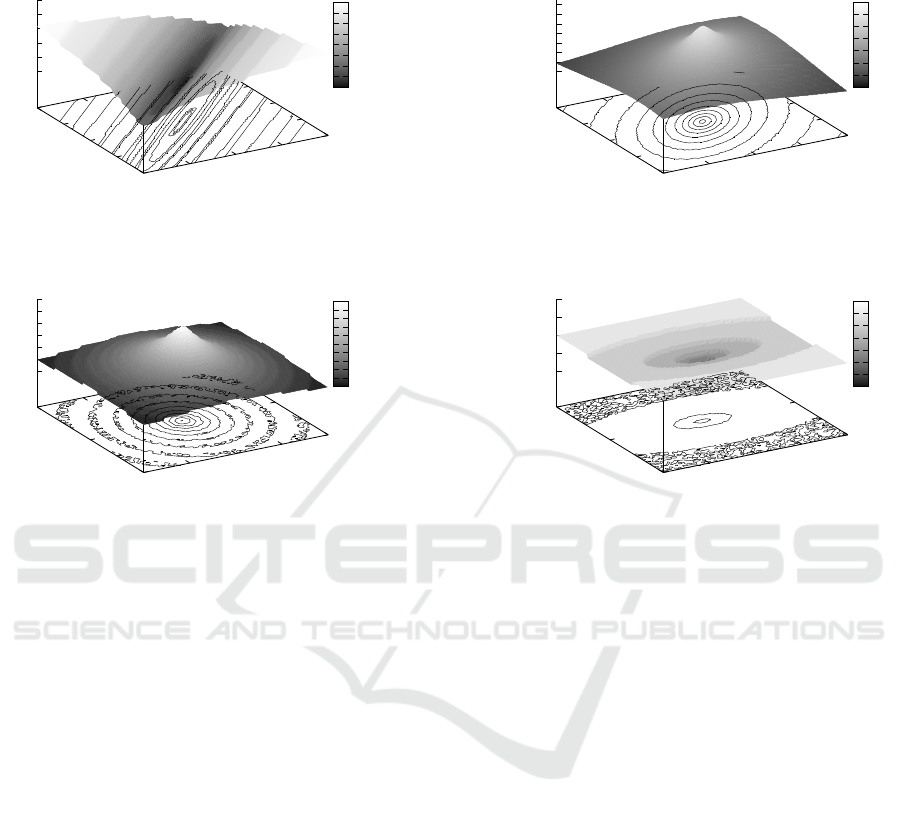
Figure 3: Recorded convergence times of the particle location pwcet(E[φ
t
],w) for example starting conditions: e
0
= −9 and
e
1
= −5; 3D shape with logarithmic scale for pwcet(E[φ
t
],w) (left graph), and isolines from 0 to 100 with step 5 (right graph).
0
1
2
3
4
5
6
7
8
-1
-0.5
0
0.5
1
1
10
100
1000
10000
E[φ
t
]
w
0
2000
4000
6000
8000
10000
12000
14000
16000
0 1 2 3 4 5 6 7 8
E[φ
t
]
-1
-0.5
0
0.5
1
w
Figure 4: Recorded convergence times of the particle location variance pvwct(E[φ
t
],w) for example starting conditions:
e
0
= −9 and e
1
= −5; 3D shape with logarithmic scale for pvwct(E[φ
t
],w) (left graph), and isolines from 0 to 20000 with
step 10 (right graph).
In both figures the configurations generating
pwcet > 100000 have assigned a constant value of
100000. It is also assumed that c
1
= c
2
= φ
max
/2.
5 CONVERGENCE OF
VARIANCE OF PARTICLE
LOCATION DISTRIBUTION
Convergence of the expected value of the particle lo-
cation still does not guarantee the convergence of the
particle position. This is the case, for example, where
the particle oscillates symmetrically and the oscilla-
tions do not fade. In (Poli, 2009) author studied con-
vergence of the variance and standard deviation of the
particle location and obtained region (Ineq. (3)) of the
order-2 stability of the system. In the studied model
with the best particle stagnation assumption described
by Eq. (6) the variance of the particle location con-
verges to zero for the configurations originating from
the order-2 stability region (Ineq. 3).
It is interesting to show how fast the variance of
a particle location fades. Formally, we are interested
in evaluation of the particle location variance conver-
gence time. Below, d
t
denotes variance of particle
location in time t, that is
d
t
= Var[x
t
] = m
t
− e
2
t
. (27)
Definition 5.1 (The particle location variance con-
vergence time). Let δ be a given positive num-
ber. The particle location variance convergence time
pvct(δ) is the minimal number of steps necessary to
get the variance of particle location lower than δ for
all subsequent time steps, that is
pvct(δ) = min{t : d
s
< δ f or all s ≥ t}. (28)
Empirical evaluation of pvct is difficult, so, we in-
troduce the less restrictive measure, that is, a particle
location variance weak convergence time.
Definition 5.2 (The particle location variance weak
convergence time). Let δ be a given positive number.
The particle location variance weak convergence time
pvwct(δ) is the minimal number of steps necessary to
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
74

get the variance of particle location lower than δ, that
is
pvwct(δ) = min{t : d
t
< δ}. (29)
As in the case of pwcet(δ) and pwct(δ) it is also
obvious that pvwct(δ) ≤ pvct(δ) and equality gener-
ally does not hold.
When pvwct(δ) has to be calculated according to
Def. 5.2, it is important to select appropriately initial
values of the algorithm parameters: h
1
and m
1
. To do
this, lets first note that Eq. (1) can be converted to the
form:
v
t+1
= w · v
t
+ ϕ
t
(y − x
t
),
x
t+1
= x
t
+ v
t+1
.
(30)
When we substitute zero for t in Eq. (30) we obtain
Eq. (31):
x
1
= x
0
+ w · v
0
+ ϕ
0
(y − x
0
). (31)
Let us assume, that x
0
and v
0
are independent ran-
dom variables. Applying the expectation operator to
both sides of Eq. (31) we get
e
1
= e
0
(1 − f ) + w · s
0
+ f y, (32)
where s
0
= Ev
0
. From Eq. (32) we obtain
s
0
=
e
1
− e
0
(1 − f ) − f y
w
. (33)
Multiplying both sides of Eq. (31) by x
0
we get
x
1
x
0
= x
2
0
(1 − ϕ
0
) + wx
0
v
0
+ x
0
ϕ
0
y. (34)
Applying expectation operator to both sides of the
Eq. (34) we obtain
h
1
= m
0
(1 − f ) + we
0
s
0
+ e
0
f y, (35)
and substituting expression from Eq. (33) for s
0
h
1
= m
0
(1 − f ) + e
0
(e
1
− e
0
(1 − f ) − f y) + e
0
f y.
(36)
Eventually, above formula can be simplified to the
form
h
1
= (m
0
− e
2
0
)(1 − f ) + e
0
e
1
, (37)
or equivalent
h
1
= d
0
(1 − f ) + e
0
e
1
. (38)
Next, we raise both sides of Eq. (31) to the second
power and obtain
x
2
1
=x
2
0
(1 − ϕ
0
)
2
+ w
2
v
2
0
+ ϕ
2
0
y
2
+ 2wx
0
(1 − ϕ
0
)v
0
+ 2x
0
(1 − ϕ
0
)v
0
+ 2x
0
(1 − ϕ
0
)ϕ
0
y + 2wv
0
ϕ
0
y.
(39)
Applying the expectation operator to both sides of
Eq.(39) and because of the statistical independence
of x
0
, ϕ
0
and v
0
we get
m
1
=m
0
(1 − 2 f + g) + w
2
s
2
+ gy
2
+ 2we
0
(1 − f )s
0
+ 2e
0
( f −g)y + 2ws
0
f y,
(40)
where s
2
= Ev
2
0
. Expression from Eq. (33) can be
substituted for s
0
in Eq. (40). This way we obtain
m
1
=m
0
(1 − 2 f + g) + w
2
s
2
+ gy
2
+ 2(e
1
− e
0
(1 − f ) − f y)(e
0
(1 − f ) + f y).
(41)
Let d
0
= Var[x
0
] and l
o
= Var[v
0
] are given. Then
we can calculate
m
0
= e
2
0
+ d
0
and
s
2
= s
2
0
+ l
0
,
what can be written in view of Eq. (33) as
s
2
=
(e
1
− e
0
(1 − f ) − f y)
2
w
2
+ l
0
. (42)
Expression from Eq. (42) can be substituted for s
2
in
Eq. (41). This way one can obtain the final version of
equation for m
1
:
m
1
=m
0
(1 − 2 f + g) + w
2
l
0
+ gy
2
+ e
2
1
− (e
0
(1 − f ) + f y)
2
.
(43)
Algorithm 2: Particle location variance weak convergence
time evaluation procedure.
1: Initialize: T
max
= 1e+5, two successive expected
locations e
0
and e
1
, variance of initial location
and velocity, for example, d
0
= 0 and l
0
= 1 re-
spectively, and an attractor of a particle, for ex-
ample, y = 0.
2: f = (c
1
+ c
2
)/2;
3: g = (c
1
)
2
/12 + (c
2
)
2
/12 + ((c
1
+ c
2
)/2)
2
;
4: m
0
= e
2
0
+ d
0
.
5: m
1
= m
0
(1 − 2 f + g) +w
2
l
0
+ gy
2
+ e
2
1
− (e
0
(1 −
f ) + f y)
2
.
6: h
1
= d
0
(1 − f ) + e
0
e
1
.
7: d
1
= m
1
− e
2
1
.
8: t = 1
9: repeat
10: h
t+1
= (1 + w − f )m
t
− wh
t
+ f ye
t
11: e
t+1
= (1 + w − f )e
t
− we
t−1
+ f y
12: m
t+1
= m
t
((1 + w)
2
− 2(1 + w) f + g) +
m
t−1
w
2
−2h
t
w(1+w − f )+2e
t
y( f (1+w)−g)−
2e
t−1
wy f +y
2
g
13: d
t+1
= m
t+1
− e
2
t+1
14: t = t + 1
15: until (d
t
> δ) ∧ (d
t
< 1e+10) ∧(t < T
max
)
16: if d
t
< 1e+10 then
17: return t
18: else
19: return T
max
20: end if
Particle Convergence Expected Time in The PSO Model with Inertia Weight
75
-10
-5
0
5
10
-10
-5
0
5
10
300
350
400
450
500
550
E[φ
t
]=0.06; w=0.96; y=0
e
0
e
1
300
320
340
360
380
400
420
440
460
(a) type A
-10
-5
0
5
10
-10
-5
0
5
10
300
320
340
360
380
400
420
440
E[φ
t
]=1.76; w=0.96; y=0
e
0
e
1
300
320
340
360
380
400
420
440
(b) type B
-10
-5
0
5
10
-10
-5
0
5
10
60
65
70
75
80
85
90
E[φ
t
]=3.91; w=0.96; y=0
e
0
e
1
64
66
68
70
72
74
76
78
80
82
84
(c) type C
-10
-5
0
5
10
-10
-5
0
5
10
0
5
10
15
20
E[φ
t
]=2.11; w=0.06; y=0
e
0
e
1
4
5
6
7
8
9
10
11
(d) type D
Figure 5: Graphs of recorded values of the particle location variance pvwct(E[φ
t
],w) for selected configurations (E[φ
t
],w).
Empirical characteristics of the particle location
variance weak convergence time (pvwct) are given in
Fig. 4 and Fig. 5.
As in the case of empirical characteristics of
pwcet, Fig. 4 shows the values of pvwct also ob-
tained for a grid of configurations (φ
max
,w) start-
ing from [φ
max
= 0.0, w = −1.0] and changing with
step 0.02 but in both directions (which also gave
200 × 100 points). The configurations generating
pvwct > 100000 also have assigned a constant value
of 100000 and it is assumed that c
1
= c
2
= φ
max
/2.
Fig. 5 presents the values of pvwct as a function
of e
0
and e
1
where E[φ
t
] and w are fixed. The grid
of pairs [e
0
,e
1
] consists of 40000 points (200 × 200)
varying from -10 to 10 for both e
0
and e
1
.
The characteristics depicted in Fig. 4 and Fig. 5
were obtained with Algorithm 2 for selected values of
variance of initial location d
0
= 0 and velocity l
0
= 1.
6 CONCLUSIONS
In the presented research for the stochastic model of
PSO with inertia weight we propose new measures
inspired by the measure of particle convergence time
earlier defined for the deterministic model of PSO.
The proposed measures are based on the order-1 and
order-2 analysis of PSO dynamics.
The order-1 equivalent of particle convergence
time (pct) is the particle convergence expected time
pcet(δ) which represents the minimal number of steps
necessary for the expected particle location to obtain
equilibrium. As in the deterministic case, the upper
bound formula (pcetb(δ)) is also derived.
For the order-2 analysis of the PSO model the par-
ticle location variance convergence time pvct(δ) is
proposed as a minimal number of steps necessary to
get variance of particle location lower than δ for all
subsequent time steps.
Weak versions of pcet(δ) and pvct(δ), that is,
pwcet(δ) and pvwct(δ) are also proposed as more
convenient for experimental evaluation. Empirical
characteristics of pwcet(δ) and pvwct(δ) are pre-
sented. The issue of appropriate selection of initial
parameters for the pvwct(δ) evaluation procedure is
discussed.
ACKNOWLEDGMENTS
The authors would like to thank Prof. Mohammad
Reza Bonyadi for inspiration and valuable comments
and directions.
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
76

REFERENCES
Bonyadi, M. R. and Michalewicz, Z. (2016a). Analysis of
stability, local convergence, and transformation sensi-
tivity of a variant of particle swarm optimization algo-
rithm. IEEE T. Evolut. Comput., 20(3):370–385.
Bonyadi, M. R. and Michalewicz, Z. (2016b). Particle
swarm optimization for single objective continuous
space problems: a review. Evol. Comput. Date of
Publication: March 8, 2016.
Cleghorn, C. W. and Engelbrecht, A. P. (2014). A gener-
alized theoretical deterministic particle swarm model.
Swarm Intelligence, 8(1):35–59.
Cleghorn, C. W. and Engelbrecht, A. P. (2015). Particle
swarm variants: standardized convergence analysis.
Swarm Intelligence, 9(2):177–203.
Jiang, M., Luo, Y. P., and Yang, S. Y. (2007). Stochastic
convergence analysis and parameter selection of the
standard particle swarm optimization algorithm. In-
formation Processing Letters, 102(1):8–16.
Lehre, P. K. and Witt, C. (2013). Finite First Hitting Time
Versus Stochastic Convergence in Particle Swarm Op-
timisation, pages 1–20. Springer New York.
Liu, Q. (2015). Order-2 stability analysis of particle swarm
optimization. Evol. Comput., 23(2):187–216.
Poli, R. (2008a). Analysis of the publications on the appli-
cations of particle swarm optimisation. J. Artif. Evol.
App., 2008:4:1–4:10.
Poli, R. (2008b). Dynamics and stability of the sampling
distribution of particle swarm optimisers via moment
analysis. Journal of Artificial Evolution and Applica-
tions, 2008(Article ID 761459).
Poli, R. (2009). Mean and variance of the sampling distri-
bution of particle swarm optimizers during stagnation.
IEEE T. Evolut. Comput., 13(4):712–721.
Poli, R. and Broomhead, D. (2007). Exact analysis of the
sampling distribution for the canonical particle swarm
optimiser and its convergence during stagnation. In
GECCO ’07: Proceedings of the 9th annual confer-
ence on Genetic and evolutionary computation, vol-
ume 1, pages 134–141. ACM Press.
Trelea, I. C. (2003). The particle swarm optimization algo-
rithm: convergence analysis and parameter selection.
Inform. Process. Lett., 85(6):317 – 325.
Trojanowski, K. and Kulpa, T. (2015). Particle convergence
time in the PSO model with inertia weight. In Pro-
ceedings of the 7th International Joint Conference on
Computational Intelligence (IJCCI 2015) - Volume 1:
ECTA, pages 122–130.
van den Bergh, F. and Engelbrecht, A. P. (2006). A study of
particle swarm optimization particle trajectories. In-
form. Sciences, 176(8):937–971.
Witt, C. (2009). Why standard particle swarm optimisers
elude a theoretical runtime analysis. In Proceedings of
the Tenth ACM SIGEVO Workshop on Foundations of
Genetic Algorithms, FOGA ’09, pages 13–20. ACM.
Particle Convergence Expected Time in The PSO Model with Inertia Weight
77
