
Evolution of Generic Square Calculations in Cellular Automata
Michal Bidlo
Brno University of Technology, Faculty of Information Technology,
IT4Innovations Centre of Excellence, Boˇzetˇechova 2, 61266 Brno, Czech Republic
Keywords:
Evolutionary Algorithm, Cellular Automaton, Transition Function, Conditional Rule, Square Calculation.
Abstract:
The paper deals with the design of uniform multi-state one-dimensional cellular automata using an evolution-
ary algorithm and their application to solve the problem of generic square calculations. The key idea is based
on the representation of the transition functions for the automata, which utilises the concept of conditionally
matching rules. This technique allows us to design complex cellular automata for which the conventional rep-
resentations have failed. A study is proposed with various settings of the experimental system, which concerns
the way of evaluating the candidate solutions, the number of cell states and the number of conditional rules of
the transition functions. It is shown that various generic solutions for the square calculation can be obtained in
one-dimensional cellular automata using local interactions of cells only. The results presented demonstrates
an ability of the evolution to discover innovative solutions both from the view of complexity of the cellular
automaton and the number of steps needed to calculate the results in comparison with the known solution.
1 INTRODUCTION
The problem of performing computations represents
one of the typical tasks often investigated in relation
with cellular automata (CAs). The concept of cellu-
lar automata was introduced by von Neumann in (von
Neumann, 1966). One of the aspects widely studied
in his work was the problem of (universal) computa-
tional machines and the question about their ability
to make copies of themselves (i.e. to self-reproduce).
Von Neumann proposed a model with 29 cell states
to perform this task. Later Codd proposed another
approach and showed that the problem of computa-
tion and construction can be performed by means of
a simplified model working with 8 states only (Codd,
1968).
Several other researchers have dealt with this is-
sue and studied cellular automata usually by means
of various rigorous techniques. Sipper studied com-
putational properties of binary cellular automata (i.e.
those working with 2 cell states only) and proposed a
concept of universal computing platform using a two-
dimensional (2D) CA with non-uniform transition
function (i.e. each cell can, in general, be controlled
by a different set of transition rules) (Sipper, 1995).
Sipper showed that, by introducing the non-uniform
concept to the binary CAs, universal computation can
be realised, which was not possible using the Codd’s
model. In fact, Sipper’s work significantly reduced
the complexity of the CA in comparison with the
models published earlier. Nevertheless even the bi-
nary uniform 2D CAs can be computationally univer-
sal if 9-cell neighbourhood is considered. Such CA
was implemented using the famous rules of the Game
of Life (Berlekamp et al., 2004) (original proof of the
concept was published in 1982 and several times re-
visited – e.g. see (Durand and Rka, 1999)(Ilachinski,
2001)(Rendell, 2011)(Rendell, 2013)).
Although binary CAs may be advantageous due
to simple elementary rules and hardware implemen-
tations in particular, many operations and real-world
problems can effectively be solved rather by multi-
state cellular automata (i.e. those working with more
than 2 cell states). A technique for the construction
of computing systems in a 2D CA was demonstrated
in (Stefano and Navarra, 2012) using rules of a sim-
ple game called Scintillae working with 6 cell states.
Computational universality was also studied with re-
spect to one-dimensional (1D) CA, e.g. in (Lindgren
and Nordahl, 1990)(Yuns, 2010).
However, in some cases application specific op-
erations (algorithms) may be more suitable than pro-
gramming a universal system, allowing to better opti-
mize various aspects of the design (e.g. resources, ef-
ficiency, data encoding etc.). For example, Tempesti
(Tempesti, 1995) and Perrier et al. (Jean-Yves Perrier,
1996) showed that specific arrangements of cell states
can encode sequences of instructions (programs) to
94
Bidlo, M.
Evolution of Generic Square Calculations in Cellular Automata.
DOI: 10.5220/0006064800940102
In Proceedings of the 8th International Joint Conference on Computational Intelligence (IJCCI 2016) - Volume 1: ECTA, pages 94-102
ISBN: 978-989-758-201-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
perform a given operation. Wolfram presented vari-
ous transition functions for CAs in order to compute
elementary as well as advanced functions (e.g. par-
ity, square, or prime number generation) (Wolfram,
2002). Further problems were investigated in recent
years (Ninagawa, 2013)(Sahoo et al., 2014).
The proposed work represents a part of our wider
research in the area of cellular automata where rep-
resentation techniques and automatic (evolutionary)
methods for the design of complex multi-state cellu-
lar automata are investigated. As cellular automata
represent a platform potentially important for future
technologies (see their utilisation in various emerg-
ing fields, e.g. (Mardiris et al., 2015), (Sridharan and
Pudi, 2015) or (Sahu et al., 2010)), it is worth study-
ing their design and behaviour on the elementary level
as well (i.e. using various benchmark problems). In
this paper the problem of generic square calculations
in 1D cellular automata is treated.
The goal is to design transition functions for cel-
lular automata using evolutionary algorithms, which
satisfy the given behaviour with respect to some spe-
cific initial and target conditions. It will be shown that
the evolutionary algorithm can design various transi-
tion functions for uniform 1D CAs (that have never
been seen before) to perform generic square calcula-
tions in the cellular space using just local interactions
of cells. The analysis of the results demonstrates that
various generic CA-based solutions of the squaring
problem can be discovered, which substantially over-
come the known solution regarding both the complex-
ity of the transition functions and the number of steps
(speed) of calculation.
2 SETTINGS OF CELLULAR
AUTOMATA
In this paper, 1D uniformcellular automata are treated
with the following specification (target behaviour).
The number of cell states is investigated for values 4,
6, 8 and 10 (this was chosen on the basis of the exist-
ing solution (Wolfram, 2002) that uses 8 states; more-
over it is worth of determining whether less states will
enable to design generic solutions and whether the EA
will be able to find solutions in a huge search space
induced by 10 cell states). The new state of a given
cell depends on the states of its west neighbour (c
W
),
the cell itself (central cell, c
C
) and its east neighbour
(c
E
), i.e. it is a case of 3-cell neighbourhood. A step
of the CA will be considered as a synchronous up-
date of state values of all its cells according to a given
transition function. For the practical implementation
purposes, cyclic boundary conditions are considered.
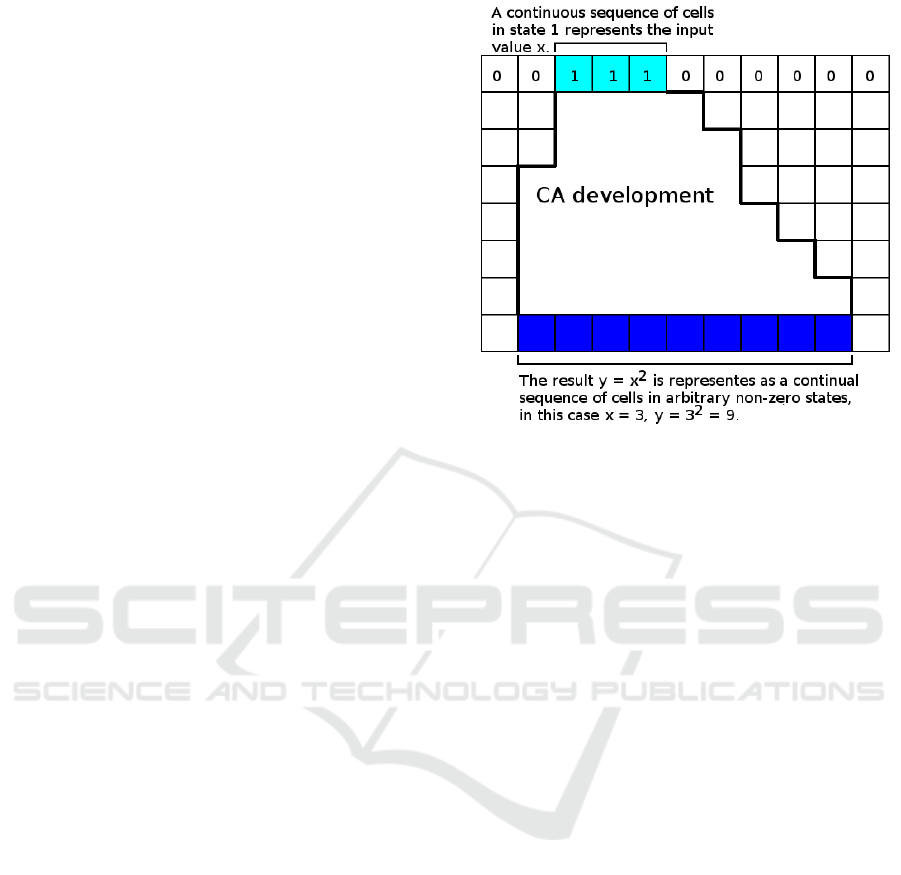
Figure 1: Illustration of encoding integer values in a 1D
ccellular automaton. In this example x = 3, y = 9.
However, it is important to note that CAs with suf-
ficient sizes are used in order to avoid affecting the
development by the finite number of cells.
The value of x is encoded in the initial CA state as
a continuoussequence of cells in state 1, whose length
(i.e. the number of cells in state 1) corresponds to x,
the other cells possess state 0. For example, the state
of a 12-cell CA, which encodes x = 3, can appear as
0000011100000. The result y = x
2
, that will emerge
from the initial state in a finite number of steps, is
assumed as a stable state in which a continuous se-
quence of cells in non-zero states can be detected, the
length of which equals the value of y, the other cells
are required in state 0. For the aforementioned exam-
ple, the result can appear as 002222222220 or even
023231323200 (there is a sequence of non-zero cells
of length 3
2
= 9). The concept of representing the in-
put value x and the result y is graphically illustrated
in Figure 1. This is a generalised interpretation based
on the idea presented in (Wolfram, 2002), page 639.
The goal is to discover transition functions for the CA,
that are able to calculate the square of arbitrary num-
ber x > 1.
In order to represent the transition functions for
CAs, the concept of Conditionally Matching Rules
(CMR), originally introduced in (Bidlo and Vasicek,
2013), will be applied. This technique showed as
very promising for designing complex cellular au-
tomata (Bidlo, 2015)(Bidlo, 2016). For the 1D CA
working with 3-cell neighbourhood, a CMR is de-
fined as (cond
W
s
W
)(cond
C
s
C
)(cond
E
s
E
) → s
Cnew
,
where cond
⋆
denotes a condition function and s
⋆
Evolution of Generic Square Calculations in Cellular Automata
95

denotes a state value. Each part (cond
⋆
s
⋆
) on the
left of the arrow is evaluated with respect to the state
of a specific cell in the neighbourhood (in this case
c
W
, c
C
and c
E
respectively). In this paper the rela-
tion operators =, 6=, ≥ and ≤ are considered as the
condition functions. A finite sequence of CMRs rep-
resents a transition function. In order to determine
the new state of a cell, the CMRs are evaluated se-
quentially. If a rule is found in which all conditions
are true (with respect to the states in the cell neigh-
bourhood), s
Cnew
from this rule is the new state of the
central cell. Otherwise the cell state does not change.
For example, consider a transition function that con-
tains a CMR (6= 1)(6= 2)(≤ 1) → 1. Let c
W
,c
C
,c
E
be
states of cells in a neighbourhood with values 2, 3,0
respectively, and a new state of the central cell ought
to be calculated. According to the aforementioned
rule, c
W
6= s
W
is true as 2 6= 1, similarly c
C
6= s
C
is
true (3 6= 2) and c
E
≤ s
E
(0 ≤ 1). Therefore, this CMR
is said to match, i.e. s
Cnew
= 1 on its right side will
update the state of the central cell.
Note that the evolved CMRs can be transformed
to the conventional table rules (Bidlo, 2016). In this
work the transformation is performed as follows: (1)
For every possible combination of states c
W
c
C
c
E
in cellular neighborhood a new state s
Cnew
is calcu-
lated using the CMR-based transition function. (2) If
c
C
6= s
Cnew
(i.e. the cell state ought to be modified),
then a table rule of the form c
W
c
C
c
E
→ s
Cnew
is gen-
erated. Note that the combinations of states not in-
cluded amongst the table rules do not change the state
of the central cell, which is treated implicitly during
the CA simulation. The number of such generated
rules will represent a metrics indicating the complex-
ity of the transition function.
In order to determine the complexity of the tran-
sition function with respect to a specific square cal-
culation in CA, a set of used rules is created using
the aforementioned principle whereas the combina-
tions of states c
W
c
C
c
E
are considered just occuring
during the given square calculation in the CA. There
metrics (together with the number of states and CA
steps) will allow us to compare the solutions obtained
by the evolution and to identify the best results with
respect to their complexity and efficiency.
An evolutionary algorithm will be applied to
search for suitable CMR-based transition functions as
described in the following section.
3 EVOLUTIONARY SYSTEM
SETUP
In this paper a custom evolutionary algorithm (EA)
was utilised, which is a result of our long-term exper-
imentation in this area. Note, however, that neither
tuning of the EA nor in-depth analysis of the evolu-
tionary process is a subject of this work. The EA is
based on a simple genetic algorithm (Holland, 1975)
with a tournament selection of base 4 and a custom
mutation operator. Crossover is not used as it has not
shown any improvement in success rate or efficiency
of our experiments.
The EA utilises the following fixed-length repre-
sentation of the conditionally matching rules in the
genomes. For the purpose of encoding the condition
functions =, 6=, ≥ and ≤, integer values 0, 1, 2 and
3 will be used respectively. Each part (cond
⋆
s
⋆
)
of the CMR is encoded as a single integer P
⋆
in the
range from 0 to M where M = 4∗ S− 1 (4 is the fixed
number of condition functions considered and S is the
number of cell states) and the part → s
Cnew
is repre-
sented by an integer in the range from 0 to S−1. In or-
der to decode a specific condition and state value, the
following operations are performed: cond
⋆
= P
⋆
/S,
s
⋆
= P
⋆
mod S (note that / is the integer division
and mod is the modulo-division). This means that a
CMR (cond
W
s
W
)(cond
C
s
C
)(cond
E
s
E
) → s
Cnew
can
be represented by 4 integers; if 20 CMRs ought to
be encoded in the genome, then 4∗ 20 = 80 integers
are needed. For example, consider S = 3 for which
M = 4∗ 3− 1 = 11. If a 4-tuple of integers (2 9 11 2)
representing a CMR in the genome ought to be de-
coded, then the integers are processed respectively as:
• cond
W
= 2/3 = 0 which corresponds to the oper-
ator =, s
W
= 2 mod 3 = 2,
• cond
C
= 9/3 = 3 which corresponds to the opera-
tor ≤, s
C
= 9 mod 3 = 0,
• cond
E
= 11/3 = 3 which corresponds to the oper-
ator ≤, s
E
= 11 mod 3 = 2,
• s
Cnew
= 2 is directly represented by the 4th integer.
Therefore, a CMR of the form (= 2)(≤ 0)(≤ 2) → 2
has been decoded.
The following variants of the fitness functions are
treated (note that the input x is set to the middle of the
cellular array):
1. RESULT ANYWHERE (RA-fitness): The fitness
is calculated with respect to any valid arrangement
(position) of the result sequence in the CA. For
example, y = 4 in an 8-cell CA may be rrrr0000,
0rrrr000, 00rrrr00, 000rrrr0 or 0000rrrr, where
r 6= 0 represent the result states that may be gen-
erally different within the result sequence. A par-
tial fitness value is calculated for every possible
arrangement of the result sequence as the sum of
the number of cells in the expected state for the
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
96

given values of x. The final fitness is the highest
of the partial fitness values.
2. SYMMETRIC RESULT (SR-fitness): The result
is expected symmetrically with respect to the in-
put. For example, if 0000011100000 corresponds
to initial CA state for x = 3, then the result y = 3
2
is expected as a specific CA state 00rrrrrrrrr00
(each r may be represented by any non-zero state).
The fitness is the number of cells in the expected
state.
The fitness evaluation of each genome is performed
by simulating the CA for initial states with the val-
ues of x from 2 to 6. The result of the x
2
calculation
is inspected after the 99th and 100th step of the CA,
which allows to involve the state stability check into
the evaluation. This approach was chosen on the basis
of the maximal x evaluated during the fitness calcula-
tion and on the basis of the number of steps needed
for the square calculation using the existing solution
(Wolfram, 2002). In particular, the fitness of a fully
working solution evaluated for x from 2 to 6 in a 100-
cell CA is given by F
max
= 5 ∗ 2∗ 100 = 1000 (there
are 5 different values of x for which the result x
2
is in-
vestigated in 2 successive CA states, each consisting
of 100 cells). The evolved transition functions, satis-
fying the maximal fitness for the given range of x, are
checked for the ability to work in larger CAs for up
to x = 25 For the purposes of this paper, the solutions
which pass the check are considered as generic.
The EA works with a population of 8 genomes ini-
tialised randomly at the beginning of evolution. After
evaluating the genomes, four candidates are selected
randomly, the candidate with the highest fitness be-
comes a parent. An offspring is created by mutating
2 randomly selected integers in the parent. The selec-
tion and mutation continue until a new population of
the same size is created and the evolutionary process
is repeated until 2 million generations are performed.
If a solution with the maximal fitness is found, then
the evolutionary run is considered as successful. If
no such solution is found within the given generation
limit, then the evolutionary run is terminated.
4 EXPERIMENTAL RESULTS
The evolutionary design of CAs for the generic square
calculation has been investigated for the following
settings: the number of states 4, 6, 8 and 10, the tran-
sition functions consisting of 20, 30, 40 and 50 CMRs
and two ways of the fitness calculation described in
Section 3. For each setup, 100 independent evolution-
ary runs have been executed. The success rate and av-
erage number of generations needed to find a working
solution were observed with respect to the evolution-
ary process. As regards the parameters of the CA, the
minimal number of rules and steps needed to calculate
the square of x were determined.
4.1 Results for the RA-fitness
For the RA-fitness, the statistical results are sum-
marised in Table 1. The table also contains the total
numbers of generic solutions discovered for the given
state setups and parameters determined for these solu-
tions. For every number of states considered, at least
one generic solution was identified. For example, a
transition function was discovered for the 4-state CA,
which consists of 36 table rules (transformed from
the CMR representation evolved). This solution can
be optimised to 26 rules (by eliminating the rules
not used during the square calculation) which repre-
sents the simplest CA for generic square calculations
known so far (note that Wolfram’s CA works with 8
states and 51 rules (Wolfram, 2002)). Moreover, for
example, our solution needs 74 steps to calculate 6
2
whilst Wolfram’s CA needs 112 steps, which also rep-
resents a substantial innovation discovered by the EA.
The CA development corresponding to this solution is
shown in Figure 2.
Another result obtained using the RA-fitness is il-
lustrated by the CA development in Figure 3. In this
case the CA works with 6 states and its transition
function consists of 52 effective rules. The number of
steps needed, for example, to calculate 6
2
, is 46 (and
compared to 112 steps of Wolframs CA, it is an im-
provement of the CA efficiency by more than 50%)
which represents the best CA known so far for this
operation and the best result obtained in this paper.
One more example of evolved CA is shown in
Figure 4. This generic solution was obtained in the
setup with 8-state CA, however, the transition func-
tion works with 6 different states only. There are
49 transition rules, the CA needs 68 steps to calcu-
late 6
2
. This means that the EA discovered a simpler
solution (regarding the the number of states and ta-
ble rules) which is a part of the solution space of the
8-state CA. Again, this result exhibits generally bet-
ter parameters compared to the known solution from
(Wolfram, 2002). The CA development, that was not
observed in any other solution, is also interesting vi-
sually - as Fig. 4 shows, the CA generates a pattern
with some “dead areas” (cells in state 0) within the
cells that subsequently form the result sequence. The
size of these areas is gradually reduced, which finally
lead to derive the number of steps after which a stable
state containing the correct result for the given x has
emerged (illustrated by the right part of Figure 4 for
Evolution of Generic Square Calculations in Cellular Automata
97

Table 1: Statistics of the evolutionary experiments conducted using the RA-fitness (the upper part of the table) and the
parameters of the generic solutions (in the lower part of the table). The parameters of the best results obtained are marked
bold. Note that # denotes “the number of”, the meaning of “generated rules”, “used rules” and ”steps” of the CA is defined
in Section 2.
the number of states
4 6 8 10
the num. succ. avg. min. min. succ. avg. min. min. succ. avg. min. min. succ. avg. min. min.
of CMRs
rate gen. steps rules rate gen. steps rules rate gen. steps rules rate gen. steps rules
20 3 844364 54 35 30 769440 45 120 45 570939 39 232 35 328210 47 569
30 3 620998 52 36 24 749837 40 120 38 595467 42 340 33 363360 45 663
40
2 1344286 77 46 19 629122 37 136 30 701612 41 365 29 244566 46 662
50 2 959689 73 43 20 813803 41 134 35 582342 39 348 38 373490 40 762
the number of generic solutions (#generic) obtained for the given number of states
and parameters of the generic solutions: #generated rules/#used rules/#steps for 6
2
)
#generic,
1 5 6 3
176/52/46, 164/33/87, 435/49/68, 403/51/79, 934/64/56, 835/61/79,
parameters
36/26/74 152/49/78, 185/66/70, 422/39/65, 392/62/76, 916/35/76
175/52/69 423/41/68, 429/94/76
Figure 2: Example of a 4-state squaring CA development for x = 3, 4 and 5 using our most compact transition function. The
rules are: 0 0 1 → 3, 0 1 1 → 2, 0 3 0 → 2, 1 0 0 → 3, 1 0 2 → 2, 1 0 3 → 2, 1 1 0 → 0, 1 1 2 → 2, 1 1 3 → 2, 1 2 1 → 1,
1 3 0 → 1, 1 3 1 → 1, 1 3 2 → 2, 1 3 3 → 0, 2 1 2 → 3, 2 1 3 → 3, 2 2 0 → 1, 2 2 1 → 1, 2 3 1 → 1, 2 3 2 → 2, 3 0 2 → 3,
3 1 0 → 3, 3 1 1 → 3, 3 1 3 → 3, 3 2 0 → 3, 3 2 3 → 3.
x = 8 whereas the CA needs 122 steps to produce the
result).
4.2 Results for the SR-fitness
Table 2 shows the statistics for the SR-fitness together
with the total numbers of generic solutions discovered
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
98
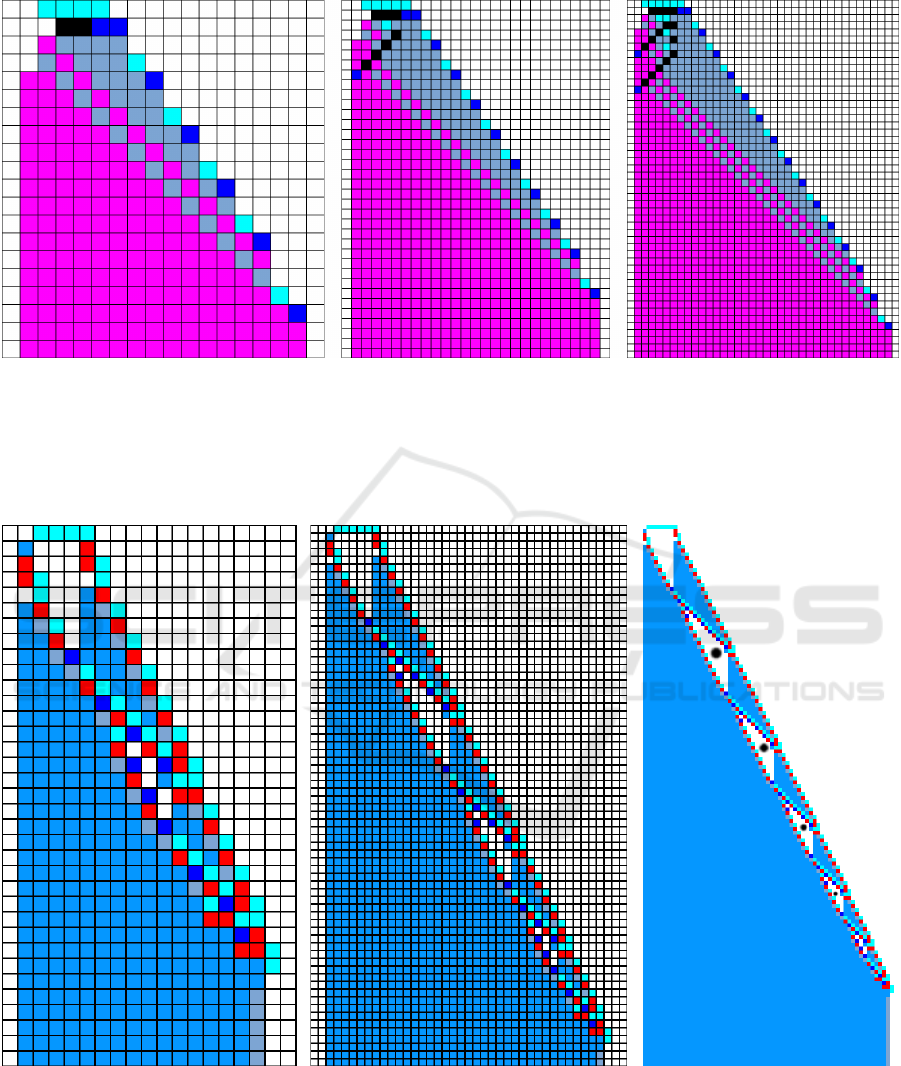
Figure 3: Example of a 6-state CA development for x = 4,5 and 6. This is the fastest CA-based (3-neighbourhood) solution
known so far and the best result obtained in this paper. The rules are: 0 0 4 → 2, 0 0 5 → 2, 0 1 1 → 0, 0 2 3 → 0, 0 2 4 → 4,
0 2 5 → 3, 0 3 2 → 2, 0 3 3 → 0, 0 4 0 → 2, 0 4 2 → 2, 0 5 3 → 0, 0 5 5 → 4, 1 0 0 → 3, 1 1 0 → 3, 1 1 1 → 5, 1 1 4 → 5,
1 4 4 → 5, 2 0 4 → 3, 2 1 0 → 2, 2 2 5 → 5, 2 3 0 → 2, 2 3 4 → 2, 2 4 0 → 2, 2 4 1 → 2, 2 4 2 → 2, 2 4 3 → 2, 2 4 4 → 2,
2 4 5 → 5, 2 5 2 → 2, 2 5 4 → 2, 3 3 0 → 4, 3 4 4 → 2, 4 0 0 → 1, 4 1 0 → 4, 4 1 1 → 4, 4 1 4 → 4, 4 2 0 → 4, 4 2 1 → 4,
4 2 3 → 4, 4 2 4 → 4, 4 3 0 → 4, 4 4 5 → 1, 4 5 1 → 4, 4 5 4 → 4, 4 5 5 → 1, 5 1 1 → 4, 5 1 4 → 4, 5 2 4 → 4, 5 3 3 → 4,
5 5 3 → 4, 5 5 4 → 4, 5 5 5 → 1.
Figure 4: Example of a 6-state squaring CA development (originally designed using 8-state setup) for x = 4,6 and 8. The
development shows a specific pattern evolved to derive the result of x
2
, which was not observed in any other solution. The
part on the right shows a complete global behaviour of this CA for x = 8 with some “dead areas” (marked by black spots)
which lead to the correct stable result by progressively reducing the size of these areas (in thic case the result of 8
2
is achieved
after 122 steps).
for the given state setups and parameters determined
for these solutions. As evident, the success rates are
generally lower compared to the RA-fitness which
is expectable because the SR-fitness allows a single
Evolution of Generic Square Calculations in Cellular Automata
99

arrangement only of the result sequence in the CA.
Moreover, just two generic CAs have been identified
out of all the runs executed for this setup. However,
the goal of this experiment was rather to determine
whether solutions of this type ever exist for cellular
automata and evaluate the ability of the EA to find
them. As regards both generic solutions, their num-
bers of used rules and CA steps are significantly bet-
ter in comparison with Wolfram’s solution (Wolfram,
2002). Specifically, Wolfram’s solution uses are 51
rules and the calculation of 6
2
takes 112 steps, whilst
the proposed results use 33, respective 36 rules and
calculate 6
2
in 71, respective 78 steps. Moreover, one
of them was discovered using a 4-state CA (Wolfram
used 8 states), which belongs to the most compact so-
lutions obtained in this paper and known so far.
Figure 5 shows examples of a CA (identified as
generic) evolved using the SR-fitness. The transition
function, originally obtained in 8-state CA setup, is
represented by 36 used rules and works with 7 states
only. Although this result cannot be considered as
very efficient (for 6
2
the CA needs 78 steps), it ex-
hibits one of the most complex emergent process ob-
tained for the square calculation, the result of which is
represented by a non-homogeneousstate. The sample
on the right of Fig. 5 shows a catout of development
for x = 11 in which the global behaviour can be ob-
served. This result demonstrates that the EA can pro-
duce generic solutions to a non-trivial problem even
for a single specific position of the result sequence re-
quired by the SR-fitness evaluation.
5 DISCUSSION
In most cases of the experimental settings the EA was
able to produce at least one generic solution for the
CA-based square calculation. Despite the 2 million
generation limit, the results from Table 1 and 2 show
that the average number of generations is mostly be-
low 1 million, which indicates a potential of the EA
to efficiently explore the search space. In compari-
son with the initial study of this problem proposed
in (Bidlo, 2016), where 200,000 generations were
performed, the significant increase of this parameter
herein is important with respect to achieving a rea-
sonable success rate and producing generic solutions
(note that an initial comparison of various ranges for x
evaluated in the fitness was proposed in (Bidlo, 2016),
the result of which was considered in this paper).
As regards the RA-fitness, which can be consid-
ered as the main technique proposed in this paper for
the evolution of cellular automata, a more detailed
analysis was performed with various multi-state CA.
As the results in Table 1 show that the number of
generic solutions increases for the number of states
from 4 to 8, then for 10-state CAs a significant re-
duction can be observed. This is probably caused by
the exponential increase of the search space depend-
ing on the number of states. The results indicate that
the 8-state setup represents a very feasible value that
may be considered as sufficient for this kind of prob-
lem (note that 6 generic solutions were obtained for
this setup).
In both sets of experiments with the RA-fitness
and SR-fitness, a phenomenon of a reduction of the
number of states was observed. This is possible due
to the identification of just the rules that are needed
for the CA development to calculate the square out
of all the rules generated from the evolved CMR-
based transition function for every valid combination
of states in the cellular neighbourhood. It was deter-
mined that the CAs in some cases do not need all the
available cell states to perform the given operation.
6 CONCLUSIONS
The goal of this paper was the evolutionary design of
uniform cellular automata for the generic square cal-
culation of integer numbers. The representation of the
transition functions for the automata, which utilised
conditionally matching rules, in combination with the
evolutionary algorithm showed that it is possible to
design variousnon-trivialtransition functions for CAs
(published herein for the first time) to perform the
generic square calculations in the cellular space us-
ing just local interactions between cells. The analysis
of the results showed a significant improvements of
the evolved CA, which overcomes the existing solu-
tion regarding both the complexity of the transition
functions and the number of steps (i.e. speed of the
CA) needed to calculate the given operation. For ex-
ample, a 4-state CA was discovered whose transition
function consists of 26 rules only, which represents
the most compact solution of this problem in the CA
working with a 3-cell neighbourhood known so far.
Another solution presented exhibits a reduction in the
number of CA steps by more than 50% against the
existing approach.
The method applied showed a potential to design
complex CAs that exhibit the given generic behaviour.
Although some different emergent processes in the
resulting CAs were discovered, the detailed analysis
of their behaviour and principles of functioning has
not yet been done (long it was also not the goal of
this paper). Moreover, the evolutionary process it-
self (regarding the details about exploring the solu-
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
100

Table 2: Statistics of the evolutionary experiments conducted using the SR-fitness (the upper part of the table) and the param-
eters of the generic solutions (in the lower part of the table). The parameters of the best result obtained are marked bold. Note
that # denotes “the number of”, the meaning of “generated rules”, “used rules” and ”steps” of the CAs is defined in Section 2.
the number of states
4 6 8 10
the num. succ. avg. min. min. succ. avg. min. min. succ. avg. min. min. succ. avg. min. min.
of CMRs
rate gen. steps rules rate gen. steps rules rate gen. steps rules rate gen. steps rules
20 2 634948 71 38 4 734200 38 126 11 982446 34 234 18 855791 53 542
30
0 - - - 5 905278 48 150 17 934123 51 327 15 910269 35 742
40
1 1546681 79 45 4 928170 33 147 11 1033059 53 317 15 898314 52 748
50
0 - - - 3 989039 44 138 12 811686 32 380 17 861850 52 796
the number of generic solutions (#generic) obtained for the given number of states
and parameters of the generic solutions: #generated rules/#used rules/#steps for 6
2
)
#generic,
1 0 1 0
parameters
38/33/71 234/36/78
Figure 5: Example of a 7-state CA controlled by a transition function evolved using the SR-fitness. A complete development
is shown for x = 4 and 5 (the left and middle sample respectively), the part on the right demonstrates a cutout of global
behaviour of the CA for x = 11 .
tion space using the CMR approach and optimal evo-
lutionary setup) still represents a topic with the work
in progress. Therefore these issues are considered in
our future research.
ACKNOWLEDGEMENTS
This work was supported by the Czech science foun-
dation project 14-04197S and by the Ministry of Ed-
ucation, Youth and Sports of the Czech Republic
from the National Programme of Sustainability (NPU
II); project IT4Innovations excellence in science -
LQ1602.
REFERENCES
Berlekamp, E. R., Conway, J. H., and Guy, R. K. (2004).
Winning Ways for Your Mathematical Plays, 2nd Ed.,
Volume 4. A K Peters/CRC Press.
Bidlo, M. (2015). Investigation of replicating tiles in cel-
Evolution of Generic Square Calculations in Cellular Automata
101

lular automata designed by evolution using condition-
ally matching rules. In 2015 IEEE International Con-
ference on Evolvable Systems (ICES), Proceedings of
the 2015 IEEE Symposium Series on Computational
Intelligence (SSCI), pages 1506–1513. IEEE Compu-
tational Intelligence Society.
Bidlo, M. (2016). On routine evolution of com-
plex cellular automata. IEEE Transactions on
Evolutionary Computation, PP(99):1–13, URL:
http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=
&arnumber=7377086&isnumber=4358751.
Bidlo, M. and Vasicek, Z. (2013). Evolution of cellular au-
tomata with conditionally matching rules. In 2013
IEEE Congress on Evolutionary Computation (CEC
2013), pages 1178–1185. IEEE Computer Society.
Codd, E. F. (1968). Cellular Automata. Academic Press,
New York.
Durand, B. and Rka, Z. (1999). The game of life: Uni-
versality revisited. In Mathematics and Its Applica-
tions, Volume 460 Cellular Automata, pages 51–74.
Springer Netherlands.
Holland, J. H. (1975). Adaptation in Natural and Artificial
Systems. University of Michigan Press, Ann Arbor.
Ilachinski, A. (2001). Cellular Automata: A Discrete Uni-
verse. World Scientific.
Jean-Yves Perrier, Moshe Sipper, J. Z. (1996). Toward a
viable, self-reproducing universal computer. Physica
D, 97(4):335–352.
Lindgren, K. and Nordahl, M. G. (1990). Universal com-
putation in simple one-dimensional cellular automata.
Complex Systems, 4(3):299–318.
Mardiris, V., Sirakoulis, G., and Karafyllidis, I. (2015). Au-
tomated design architecture for 1-d cellular automata
using quantum cellular automata. Computers, IEEE
Transactions on, 64(9):2476–2489.
Ninagawa, S. (2013). Solving the parity problem with rule
60 in array size of the power of two. Journal of Cel-
lular Automata, 8(3–4):189–203.
Rendell, P. (2011). A universal turing machine in con-
way’s game of life. In 2011 International Confer-
ence on High Performance Computing and Simulation
(HPCS), pages 764–772.
Rendell, P. (2013). A fully universal turing machine in Con-
way’s game of life. Journal of Cellular Automata,
9(1–2):19–358.
Sahoo, S., Choudhury, P. P., Pal, A., and Nayak, B. K.
(2014). Solutions on 1-d and 2-d density classifica-
tion problem using programmable cellular automata.
Journal of Cellular Automata, 9(1):59–88.
Sahu, S., Oono, H., Ghosh, S., Bandyopadhyay, A., Fu-
jita, D., Peper, F., Isokawa, T., and Pati, R. (2010).
Molecular implementations of cellular automata. In
Cellular Automata for Research and Industry, Lecture
Notes in Computer Science, Vol. 6350, pages 650–
659. Springer.
Sipper, M. (1995). Quasi-uniform computation-universal
cellular cutomata. In Advances in Artificial Life,
ECAL 1995, Lecture Notes in Computer Science, Vol.
929, pages 544–554. Springer Berlin Heidelberg.
Sridharan, K. and Pudi, V. (2015). Design of Arithmetic Cir-
cuits in Quantum Dot Cellular Automata Nanotech-
nology. Springer International Publishing Switzer-
land.
Stefano, G. D. and Navarra, A. (2012). Scintillae: How to
approach computing systems by means of cellular au-
tomata. In Cellular Automata for Research and Indus-
try, Lecture Notes in Computer Science, Vol. 7495,
pages 534–543. Springer.
Tempesti, G. (1995). A new self-reproducing cellular au-
tomaton capable of construction and computation. In
Advances in Artificial Life, Proc. 3rd European Con-
ference on Artificial Life, Lecture Notes in Artificial
Intelligence, Vol. 929, pages 555–563. Springer.
von Neumann, J. (1966). The Theory of Self-Reproducing
Automata. A. W. Burks (ed.), University of Illinois
Press.
Wolfram, S. (2002). A New Kind of Science. Wolfram Me-
dia, Champaign IL.
Yuns, J.-B. (2010). Achieving universal computations
on one-dimensional cellular automata. In Cellular
Automata for Research and Industry, Lecture Notes
in Computer Science Volume 6350, pages 660–669.
Springer.
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
102
