
Hitting Kinematics for Precise Ball-Bat Contact in Collegiate
Baseball Hitters
Jun Misaki
1
, Takatoshi Higuchi
2
, Ryo Tsuchikane
1
, Hiromichi Saeki
3
and Tadao Isaka
3
1
Graduate School of Sport and Health Science, Ritsumeikan University, 1-1-1, Nojihigashi,
Kusatsu, Shiga, 525-8577, Japan
2
Faculty of Socio-Environmental Studies, Fukuoka Institute of Technology, 3-30-1, Wajiro-higashi,
Higashiku, Fukuoka, 811-0295, Japan
3
College of Sport and Health Science, Ritsumeikan University, 1-1-1, Nojihigashi, Kusatsu, Shiga, 525-8577, Japan
Keywords: Baseball, Hitter, Precision, Ball-Bat Contact.
Abstract: In baseball, higher bat velocity and the bat control are required for the successful hitting. Although
kinematical factors related bat velocity have been studied, the knowledge about hitting kinematics related
ball-bat contact precision is limited. The aim of this study was to examine the hitting kinematics for precise
ball-bat contact in collegiate baseball hitters. Ten collegiate baseball field players completed 20 swings at a
ball on the baseball tee, and their joint angles were calculated. The results indicate that hitters with lower
precision in ball-bat contact might have excessive variability in joint angles in trail arm.
1 OBJECTIVES
Hitting a baseball has been described as one of the
most difficult tasks in sports. Baseball hitters should
accelerate the bat head within short duration, and
lead the bat toward the appropriate location.
Therefore, higher bat velocity and the bat control are
required for the successful hitting (Morishita et al,
2013).
A previous study showed that collegiate and
professional baseball players hit a ball on the
baseball tee with highly precise ball-bat contact.
(Higuchi et al, 2013). Although kinematic factors
related bat velocity have been studied (Welch et al,
1995; Escamilla et al, 2009; Inkster et al, 2010), the
knowledge about hitting kinematics related ball-bat
contact precision is still limited. For the coaching on
hitting precision based upon the scientific evidences,
the investigation about hitting kinematics related
precise ball-bat contact should be required.
This study aims to examine the hitting kinematics
for precise ball-bat contact in collegiate baseball
hitters.
2 METHODS
2.1 Participants
Ten male collegiate baseball field players (Age: 19.0
±0.0 years, Height: 1.778±0.051 m, Body mass:
75.3±7.3 kg) were participated in this study. The
mean length of their baseball experience was 11.1 ±
2.2 years. Before the experiment, informed consent
was obtained from all participants for their
participation in this research. The Ethics Committee
on Human Research of Ritsumeikan University
approved this study.
2.2 Experimental Procedures
The experiment was conducted in the indoor
laboratory. A target board was set in front of the
participants (Figure 1). The subjects were instructed
to hit a ball on the baseball tee toward the center
point of the target board. After sufficient warm-up
and practice hitting, the participants performed two
sets of 10 trials. The heights of baseball tee were
determined as the heights of anterior superior iliac
spine in each subject.
Misaki, J., Higuchi, T., Tsuchikane, R., Saeki, H. and Isaka, T.
Hitting Kinematics for Precise Ball-Bat Contact in Collegiate Baseball Hitters.
In Extended Abstracts (icSPORTS 2016), pages 31-34
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
31

Figure 1: Experimental setting.
2.3 Data Collection
Movements of the bat and ball were recorded using
two synchronized, high-speed video cameras
(MEMRECAM fx-K5, Nac Image Technology,
Japan)
with 1000 frames/sec. Forty-two reflex
markers were attached to the body landmark of
participants and baseball bat. Those markers were
captured by motion capture system (MAC 3D,
Motion Analysis Corporation, USA) at 500Hz.
2.4 Data Processing
The image data of bat head, bat grip, and ball center
were manually digitized using motion analysis
software (Frame Dias V, DKH, Japan). The three-
dimensional coordinates were obtained with the
direct linear transformation method. The image at
the instant of ball-bat contact was used for the
analysis. We defined the area formed by standard
deviation in short and long axes on the bat
coordinate as an index of precision at ball-bat
contact (Figure 2).
To smooth the motion capture data, marker
coordinates were filtered using a lowpass
Butterworth digital filter with a cutoff frequency of
13.3 Hz (Welch et al, 1995; Inkster et al, 2010). We
used a rigid link model that contains two trunk
segments and 12 upper/lower joints. Therefore, 30
angles were calculated as kinematic variables of the
body. Segments/joints (angles) were, thorax and
pelvis (anterior/posterior tilt, right/left tilt, right/left
rotation), shoulder (flexion/extension,
abduction/adduction, internal/external rotation),
elbow (flexion/extension, pronation/supination),
wrist (palmar/dorsi flexion, radial/ulnar deviation),
hip (flexion/extension, abduction/adduction,
internal/external rotation), knee (flexion/extension),
ankle (dorsi/plantar flexion), respectively. Following
the joint angle calculation, coefficient of variation
(CV) in each angle was worked out as a kinematical
variable. All processing of motion capture data were
performed using Visual 3D (C-Motion, Inc., USA).
Figure 2: Index of precision at ball-bat contact.
2.5 Visualization of Results
We visualized the CV value of each angle in a
forward swing phase. The forward swing phase is
defined as the phase between swing initiation and
ball-bat contact. The data were then time-normalized
to 100% using a cubic spline (Kawamura et al,
2008). Visualization process was conducted using
Matlab 2014a (Mathworks, Inc., USA).
3 RESULTS
Figure 3 shows the results of the visualization of CV
(%) in forward swing phase of all participants (P1 to
P10). In figure 3, the degrees of CV were shown as
heat maps. Red zones indicate higher value, blue
ones represent lower value. Graphs of P1 to P10
were in order based on the index of precision at ball-
bat contact; P1 was the most precise hitter; P10 has
the lowest precision in all participants.
In particular, higher or medium values of CV
were observed in the trail shoulder, elbow, and wrist
of P5 to P9. Additionally, CV in thorax and pelvis
rotation showed medium or higher value in early to
intermediate phase of swing across all participants.
icSPORTS 2016 - 4th International Congress on Sport Sciences Research and Technology Support
32
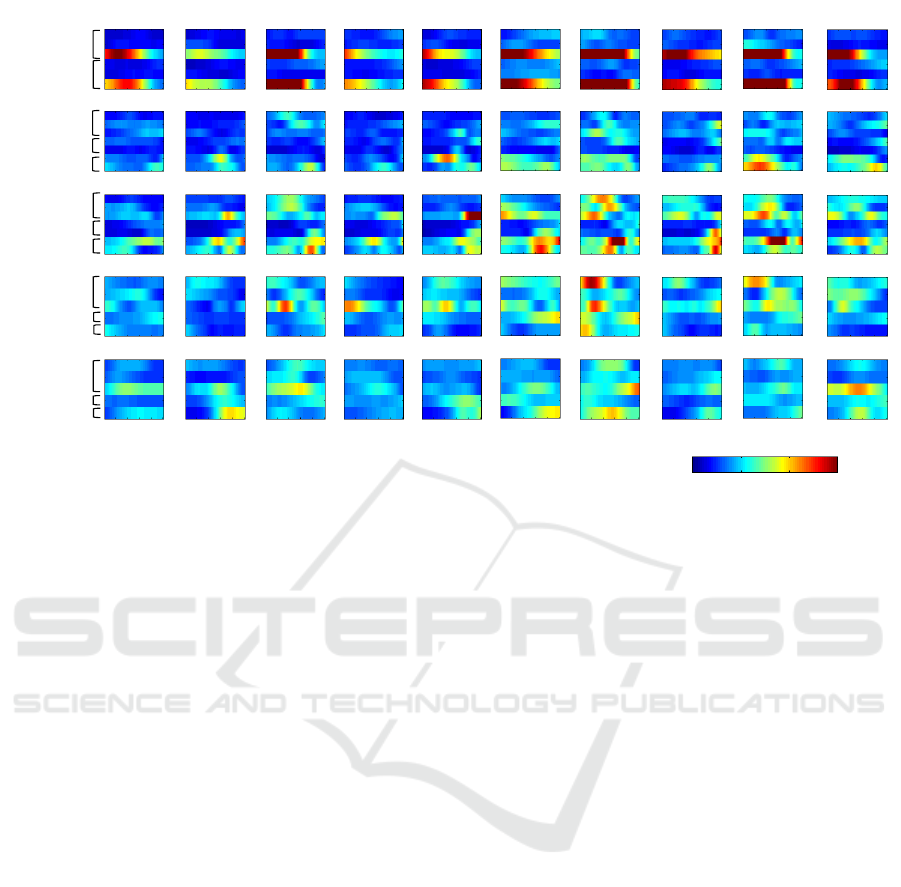
Figure 3: Visualization of coefficient of variation in forward swing phase. (Normalized time of 0 % indicates the swing
initiation and normalized time of 100 % indicates the ball-bat contact).
4 DISCUSSION
A previous research demonstrated that the angles of
elbow and wrist in trail arm have major change in
the forward swing phase (Kawamura et al, 2008).
According to this knowledge, it is considered that
excessive variability of angle in trail arm may
disturb the precise bat control. Therefore, hitters
with lower precision in ball-bat contact might have
excessive variabilities in joint angles in trail arm.
On the other hand, CV in thorax and pelvis
rotation showed medium or higher value in early to
intermediate phase of swing regardless of the index
of precision in ball-bat contact. This result suggests
that variability of thorax and pelvis rotation in early
phase of the swing is less critical to hitting precision.
Earlier studies showed that hitting kinematics
varies with skill level and age of players (Escamilla
et al, 2009; Inkster et al, 2010). Therefore, further
studies are required to investigate the hitting
kinematics relating precision at ball-bat contact in
various skill levels and ages.
ACKNOWLEDGEMENTS
We would like to appreciate for the all participants
and experimenters of this study. Additionally, we
would like to thank Haruka Shoda, for his invaluable
advices on the visualization of results in this
research.
REFERENCES
Higuchi, T., Nagami, T., Morohoshi, J., Nakata, H.,
Kanosue, K., 2013. Disturbance in hitting accuracy by
professional and collegiate baseball players due to
intentional change of target position. Perceptual and
Motor Skills, 116(2), 627-639.
Morishita, Y., Hirano, Y., Yanai, T., 2015. Mechanical
factors for determining the bat-head speed and the
orientation of the bat at ball impact in baseball hitting.
Japanese Journal of Biomechanics in Sports and
Exercise, 19(4), 201-215.
Welch, C., Banks, S., Cook, F., Draovitch, P., 1995.
Hitting a baseball: a biomechanical description.
Journal of Orthopaedic and Sports Physical Therapy,
22(5), 193–201.
Escamilla, RF., Fleisig, GS., DeRenne, C., Marcus KT.,
Claude TM, Rodney I., Edward B,
James RA., 2009.
A comparison of age level on baseball hitting
kinematics, Journal of Applied Biomechanics, 25(3).
210–218.
Inkster, B., Murphy, A., Bower, R., Watsford, M., 2011.
Differences in the kinematics of the baseball swing
Thorax
Pelvis
Lead Shoulder
Trail Shoulder
Lead Hip
Trail Hip
P1 P2 P3 P4 P5 P
6
P7 P8 P9 P10
Normarized Time [% ]
0 50 100 0 50 100 0 50 100 0 50 100 0 50 100 0 50 100 0 50 100 0 50 100 0 50 100 0 50 100
0 1 2 3
P1 P2 P3 P4 P5 P
6
P7 P8 P9 P10
Normarized Time [% ]
0 50 100 0 50 100 0 50 100 0 50 100 0 50 100 0 50 100 0 50 100 0 50 100 0 50 100 0 50 100
0 1 2 3
Lead Elbow
Lead Wrist
Trail Elbow
Trail Wrist
Lead Knee
Lead Ankle
Trail Knee
Trail Ankle
C
V
value
Hitting Kinematics for Precise Ball-Bat Contact in Collegiate Baseball Hitters
33

between hitters of varying skill. Medicine and Science
in Sports and Exercise, 43(6), 1050-1054.
Kawamura, T., Shimada, K., Takahashi, K., Morimoto, Y.,
Koike, S., Ae, M, 2008. Comparison of kinematics of
upper limb motion in the baseball batting between
high and low groups in the bat speed. Japan Journal of
Physical Education, Health and Sport Sciences, 53,
423–438.
icSPORTS 2016 - 4th International Congress on Sport Sciences Research and Technology Support
34
