
Empowering the Model-driven Engineering of Robotic Applications
using Ontological Semantics and Reasoning
Stefan Zander
1
, Nadia Ahmed
1
and Yingbing Hua
2
1
FZI Research Center for Information Technology, Haid-und-Neu-Str. 10-14, 76131 Karlsruhe, Germany
2
Karlsruhe Institute of Technology, Engler-Bunte-Ring 8, 76131 Karlsruhe, Germany
Keywords:
Knowledge Representation, Semantic Technologies, Ontologies, Cyber-physical Systems, Robotics.
Abstract:
This work discusses two scenarios in which the model-driven engineering of robotic applications can be im-
proved using ontological semantics and reasoning. The objective of the presented approach is to facilitate
reuse and interoperability between cooperating software and hardware components. Central to the presented
approach is the usage of ontologies and description logics as knowledge representation frameworks for the ax-
iomatic description of component metadata models. In the first scenario, we show how application templates
can be created using the concept of placeholders in which requirements for integrating external components
can be axiomatically specified and eligible components can be computed using subsumption reasoning. The
second scenario extends this idea for the inference of compatibilities between cooperating components. The
practical applicability of the approach is demonstrated by a concrete use case from the ReApp project.
1 INTRODUCTION
The development of robot applications is usually an
expensive and time-consuming task, resulting from
the inherent heterogeneity and complexity of in-
volved elements (data, algorithms, interfaces, proto-
cols etc.) and the required technical and domain ex-
pert knowledge. These aspects, among others, hin-
der the broad usage of robotic systems, in particu-
lar in small and medium-sized enterprises (SMEs)
and industries with high production variability (cf. the
ReApp project
1
). In order to tackle these issues, the
integration of model-driven engineering (MDE) prin-
ciples into the software- and tool-development pro-
cesses of robotic applications revealed promising im-
provements (cf. (Schlegel et al., 2009; Alonso et al.,
2010; Gherardi and Brugali, 2014)). However, the
positive effects of MDE approaches can be further in-
creased, if they are synthesized with ontological se-
mantics and formal reasoning methods, as new forms
of tool-support and assistance can be provided to soft-
ware developers, system integrators and end users
likewise (Zander et al., 2016).
In this paper, we present two scenarios that
corroborate our hypothesis that ontologies used as
knowledge representation frameworkcan improve the
1
www.reapp-projekt.de
model-driven engineering of robotic applications in
terms of reusability and utilization. In one scenario,
we show how the utilization and interoperability of
software components can be improved by axiomati-
cally describing functional requirements for external
components that are needed by a given component in
order to provide its full service (e.g., a path planing
component combined with an object detection soft-
ware). We therefore define the concept of applica-
tion templates in which axiomatically expressed re-
quirements using description logics (cf. (Baader et al.,
2003; Kr¨otzsch et al., 2014)) are encoded in compo-
nent descriptions (Gil, 2005). These axioms can be
processed by a reasoner in order to deduce eligible
components, which are hosted e.g. in application mar-
ketplaces
2
. This concept allows a software compo-
nent or robotic application to explicitly express nec-
essary requirements for external or third-party appli-
cations it requires for its correct execution on a func-
tional level (see (Zander and Awad, 2015)). These
requirements can being specified by the developers at
design time to exploit formal reasoning for inferring
recommendations of suitable components.
A second scenario demonstrates how compatibil-
2
In the context of the ReApp project, a marketplace for
robotic components was developed, the so-called ReApp-
Store (Bastinos et al., 2014).
192
Zander, S., Ahmed, N. and Hua, Y.
Empowering the Model-driven Engineering of Robotic Applications using Ontological Semantics and Reasoning.
DOI: 10.5220/0006086201920198
In Proceedings of the 8th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2016) - Volume 2: KEOD, pages 192-198
ISBN: 978-989-758-203-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ities between cooperating software components can
be automatically inferred by a reasoner on basis of
the formal model-theoretic semantics employed by
the ontology language upon which a component’s
metadata model is described. In contrast to many
rule-based approaches in which compatibility is de-
termined by evaluating expressions encoded in rule
bases, we compute compatibility between compo-
nents through subsumption reasoning, i.e., by inter-
preting the axioms encoded in the terminological part
of a knowledge base (cf. (Zander and Awad, 2015)).
We employ the Resource Description Frame-
work (RDF)
3
(W3C, 2014) as knowledge represen-
tation framework for encoding ontological informa-
tion and the Web Ontology Language (OWL)
4
(Patel-
Schneider et al., 2009; W3C OWL Working Group,
2012) for describing a model’s formal semantics us-
ing description logics (DL) fragments as they exhibit
well-understood reasoning complexity and tractabil-
ity (cf. (Baader et al., 2003; Kr¨otzsch et al., 2014)).
2 RELATED WORKS
2.1 Model-driven Engineering
During the evolution of software engineering, model-
driven software development has achieved remark-
able success. In the domain of robotics, a distinc-
tion can be made between approaches that use exist-
ing general purpose languages for modeling tasks and
those that use domain specific languages (DSL) (Bru-
gali, 2015). SmartSoft (Schlegel et al., 2009) supports
both platform-independent and platform-dependent
artifacts and provides a model-driven toolchain that
features a coordination language called SmartTCL
to model runtime communication orchestration be-
tween components. V
3
CMM (Alonso et al., 2010)
provides a meta-model for robotic component archi-
tectures that provides three different UML views of
a system regarding structure, coordination, and al-
gorithms. The HyperFlex toolchain (Gherardi and
Brugali, 2014) demonstrates how reference architec-
tures can be used for the development of robotic
applications using component models that abstract
from a specific implementation framework. The idea
is to further enable reuse for entire mature subsys-
tems. Examples for robotic DSL are the Architecture
Analysis and Design Language AADL (Ramaswamy
et al., 2014a), the RobotML language developed by
the french research project PROTEUS (Farges, 2009),
3
https://www.w3.org/RDF/
4
https://www.w3.org/OWL/
the MontiArcAutomation framework (Ringert et al.,
2013), and the CoSTAR framework modeling lan-
guage (Guerin et al., 2015). AADL plays a vital
role in the SafeRobots framework (Ramaswamy et al.,
2014c; Ramaswamy et al., 2014b) as a solution space
modeling language.
Although all these approaches enable modeling
of robotic components and systems to a certain ex-
tent, yet most of them neglect the semantic interoper-
ability, since there is barely any explicit semantic in-
terpretation of component descriptions, which means
the requirements and interactions between them are
only defined syntactically using proprietary and vary-
ing grammars. To be able to use certain frameworks, a
user is required to dive deeply into the concepts of the
underlying technologies, which significantly reduces
the practicability of the approach.
2.2 Ontologies in Robotics
In the Web of Data (aka semantic Web), ontologies
have proven their usefulness for describing concepts
and relationships between resources as they serve
as crucial constituents of a semantic interoperability
infrastructure built upon standards proposed by the
W3C. A core ontology containing common knowl-
edge about robotics and automation was developed
by the recently established working group “ontolo-
gies for robotics and automation” within the IEEE-
RAS (Prestes et al., 2013) committee. In addition
to the Semantic Sensor Network Ontology (Comp-
ton et al., 2012), which is widely used in the cyber-
physical systems and IoT domain, Ion-Mircea and
Gerd (Diaconescu and Wagner, 2014) developed a
sensor and actuator systems ontology specifically for
the Web of Things. Carbonera et al. (Carbonera et al.,
2013) defined an ontology to describe robot posi-
tioning as part of the core ontology concept by the
IEE RAS working group. Nilsson et al. (Nilsson
et al., 2009) developed a robotic component ontol-
ogy to demonstrate the possible improvements and
gains in robustness when designing robotic systems
using task-oriented models. An extensive investiga-
tion into the benefits of combining ontologies and
model-driven approaches is carried out by Assmann
et al. (Aßmann et al., 2006). Semantic technologies
could also be found in model-driven robotic frame-
works; PROTEUS (Lortal G, 2011), for example, in-
troduced a methodology for using ontologies on the
system level where knowledge transfer between ex-
perienced users is supported. The lack of fine-grained
information models limits the platform’s usability.
Empowering the Model-driven Engineering of Robotic Applications using Ontological Semantics and Reasoning
193

3 APPROACH
In the first part of this section, we describe how ap-
plication templates and placeholders can be axiomat-
ically expressed in form of ABox, TBox and RBox
axioms. The second part demonstrates the usage of
terminological knowledge for computing compatibil-
ities between components using subsumption reason-
ing. A central concept of both parts is the notion of
formal requirements, which we elaborate in detail in
the first part.
3.1 Expressing Requirements for
Application Templates
In this work, we define an application template as a
composition of placeholders that can be filled by con-
crete software or hardware components. An applica-
tion template is composed of at least one placeholder
which is expressed as a set of ABox axioms that fol-
low a specific schema (see Axioms 1-6) and define re-
quirements using terms from hardware, software and
capability ontologies
5
. For example, a robotic appli-
cation for picking-up an object from a conveyor belt
can be specified using the template concept in order
to express the requirement of three necessary com-
ponents including their respective capabilities: (1)
a camera that captures the image of the object to
be picked; (2) a position detection component that
detects the target position for controlling the robot
movement; (3) a path calculation component that cal-
culates the trajectory for the robot from its initial to
the target position. A strong point of the presented
approach is that it allows eligible components to be
expressed not only directly via their respective types
but rather by the functionalities they provide. With re-
gard to the previous example, this would be axiomat-
ically expressed as follows:
2DCamera ⊑ ∃hasCapability.{2DImageCapturing}
Vision ⊑ ∃hasCap ability.{PositionDetection}
PathCalculation ⊑
∃hasCapability.{TrajectoryCalculation}
The above mentioned functionalities are encoded
in the terminological part of the capability ontology
6
and are represented via the classes: ImageCapturing,
5
In the course of the ReApp project (www.reapp-
projekt.de) two ontologies for classifying hardware
and software components together with one on-
tology for expressing capabilities of such compo-
nents have been developed and published (see http://
ipe-id.fzi.de/ontologies/reapp/).
6
http://ipe-id.fzi.de/ontologies/reapp/doc/Capability.htm
PositionDetection and TrajectoryCalculation. Capabil-
ities are linked to hardware and software components
via role restriction axioms that act along a specified
property (hasCapability). This axiom type can be used
for the formulation of placeholders; the placeholder
for a component that offers an ImageCapturing capa-
bility can be expressed as follows:
RobotApplica tion(application1) (1)
PlaceholderExpression(p1) (2)
hasPlacehol der(application1, p1) (3)
Requirement(req1) (4)
requires(p1, req1) (5)
requiresCapability(req1, {ImageCapturing }) (6)
{ImageCapturing} ⊑ Capability (7)
requiresCapability ⊑ hasCapability (8)
Axiom 1 states that a concrete robot application-
template represented by application1-individual,
member of the class RobotApplication, has a place-
holder (Axiom 2) represented by p1-individual
member of the class PlaceholderExpression (Ax-
iom 2). This p1-individual is related to a member
of Requirement-class denoted by req1 via requires-
property (Axiom 3). Additionally to express the
requirement information by mean of functional-
ities, we define the property requiresCapability
as expressed in Axiom 6, this property relates
req1-individual to the DL nominal ImageCapturing.
Axiom 7 denotes that ImageCapturing is subsumed
by Capability. Additionally, Axiom 8 transforms
the property requiredCapability into a hasCapability
expression when inferring eligible components via
subsumption reasoning.
Assuming a robotic system contains a spe-
cific hardware component (e.g. Sick IVC-2D cam-
era), which is represented by the individual
myIVC2DCamera and classified as a member of the
2DCamera class. Based on the following axioms
2DCamera(myIVC2DCamera)
2DCamera ⊑ ∃hasCapability.{2DImageCapturing}
a reasoner is able to infer that each member of
2DCamera is also a member of the abstract class
∃hasCapability.{2DImageCapturing } and offers the
capability 2DImageCapturing, i.e., it participates in
a hasCapability-role with the nominal represented by
2DImageCapturing.
∃hasCapability.{2DImageCapturing } ←֓
(myIVC2DCamera)
Since 2DImageCapturing is subsumed by ImageCap-
turing (as stated in the capability ontology), a rea-
soner can infer that hardware components, which are
KEOD 2016 - 8th International Conference on Knowledge Engineering and Ontology Development
194

members of the class 2DCamera fulfill the place-
holder’s requirements expressed in Axioms 1-8. Be-
sides, if a component provides a capability, e.g.,
Fast2DImageCapturing, which is subsumed by 2DIm-
ageCapturing, the reasoner can also deduce that this
component fulfills the placeholder’s requirements.
Furthermore, placeholder’s requirements are also
extended with constraints in form of ABox axioms
that eligible component must satisfy. In order to ex-
press within a placeholder that the image resolution
value must be at least equal to 10 Mega Pixel we de-
fine the following axioms.
Constraint(cons1) (9)
hasConstraint(req1, cons1) (10)
requiresAttribute(cons1, {Resolution}) (11)
requiresAttribute ⊑ hasAttribute (12)
{Resolution} ⊑ Attribute (13)
hasOperator(cons1, {GreaterThan}) (14)
{GreaterThan} ⊑ Operator (15)
hasConstraintValue(cons1, ‘10‘) (16)
hasUnitOfMeasurement(co ns1, {MegaPixel}) (17)
Axioms 9 and 10 state that req1-individual (previ-
ously defined in Axiom 4) is related to cons1, mem-
ber of the class Constraint via hasConstraint-property.
Since a constraint expression consists of an attribute,
an operator and a value, cons1-individual, is related
to individuals, members of the class Attribute via re-
quiresAttribute-property (Axiom 12), members of the
class Operator via hasOperator-property (Axiom 14)
and members of the class Value via hasConstraint-
Value-property (Axiom 16). Operators are expressed
at TBox level such as the class GreaterThan (Ax-
iom 15). Axiom 16 and 17 state that the value
of cons1-individual is equal to 10 and is related to
MegaPixel-nominal via the hasUnitOfMeasurement-
property. The retrieval of components that fulfill
a placeholder’s requirements is performed by com-
paring the attribute values that a component provide
with the constraints required by a given placeholder.
Whereby, concrete instances of attributes that are ap-
pended to placeholder’s requirements as well as to
specific components are classified by the reasoner.
The fact that a specific component, classified as a
camera, has the attribute resolution can be encoded
as follows:
Sensor ⊑ ∃hasAttribute.{Resoluti on} (18)
{Resolution} ⊑ Attribute (19)
Camera ⊑ Sensor (20)
Axiom 18 denotes that members of the class Sensor
have at least one relationship to the nominal Resolu-
tion, which is a subconcept of Attribute (Axiom 19).
Since Camera is a subclass of Sensor, the reasoner
deduces that individuals, members of the class Cam-
era are also related to individuals of the class reso-
lution via hasAttribute-property. Summarized, each
component classified as a camera also has the reso-
lution attribute.
3.2 Semantic Compatibility
After eligible components that satisfy a placeholder’s
requirements are inferred by a reasoner, an additional
test is required to assure that two cooperating com-
ponents are compatible in terms of their technical in-
terface specifications. For example, a visual odom-
etry component subscribes to a ROS
7
image-topic
published by a camera access component (the cam-
era driver). Connecting these two components via
the image-topic merely based on syntactical param-
eters (e.g. the name of the ROS topic) does in most
cases not ensure their technical compatibility and sat-
isfiability of functional requirements; e.g., the visual
odometry component might require a depth image
while the camera componentprovides an intensity im-
age. In order to infer whether an eligible component
also satisfies technical requirements, requirement in-
formation is appended to the component model.
Requirement information related to a placeholder
(as described in 3.1) is also used to describe require-
ments for components in order to check whether an el-
igible component satisfies the requirements of a given
component. Therefore, requirement information is
appended to a component analogically to placehold-
ers (see Axioms 4-6). For example, asserting that a
component requires a 3DIntensityImageCapturing ca-
pability is encoded as follows:
SoftwareComponent(objectD e t e ction) (21)
Requirement(req2) (22)
requiresCapability(objectDetection,
{3DIntensityImageCapturing}) (23)
Axiom 21 states that a component represented by an
individual objectDetection is a member of the class
SoftwareComponent and is related to the req2 indi-
vidual, which is a member of the class Requirement
(Axiom 22) via the requiresCapability-property (Ax-
iom 23). In the given case, the class 3DIntensityIm-
ageCapturing is a subclass of ImageCapturing; a rea-
soner thus is able to infer additional requirement in-
formation related to the ImageCapturing class. Re-
quirement information for a concrete component are
also extended by constraints information and are ax-
iomatically expressed as described in Axiom 9-10.
7
http://wiki.ros.org/Messages
Empowering the Model-driven Engineering of Robotic Applications using Ontological Semantics and Reasoning
195
ĂƉĂďŝůŝƚLJ=Image
Processing
Maximal intensity > 170
Height = 264
Width = 400
Proc:ImageProcessing
Component
Obj Viz:Pose
Recognition Component
ƌĞƋƵŝƌĞƐĂƉĂďŝůŝƚLJ
Compatibility
Check
ĂƉĂďŝůŝƚLJ = Bilinear
Interpolation-based
Image Processing
Max intensity = 255
Size = 264 * 400
ŚasĂƉĂďŝůŝƚLJ
ŚasAttribute
(1) ĂƉĂďŝůŝƚLJ Matching
Check
ŚasConstraint
(3) Implicit Specification
Check
ŝs^ubsumedy
Perception
Error Rate < 3%
Has/mplicit
Constraints
Signal Processing
Is^ubsumedy
Error Rate = 10%
Śas/mplicit
Attributes
(Ϯ) ŽŶƚƌĂŝŶƚ&ƵůůĨŝůůŵĞŶƚ
Check
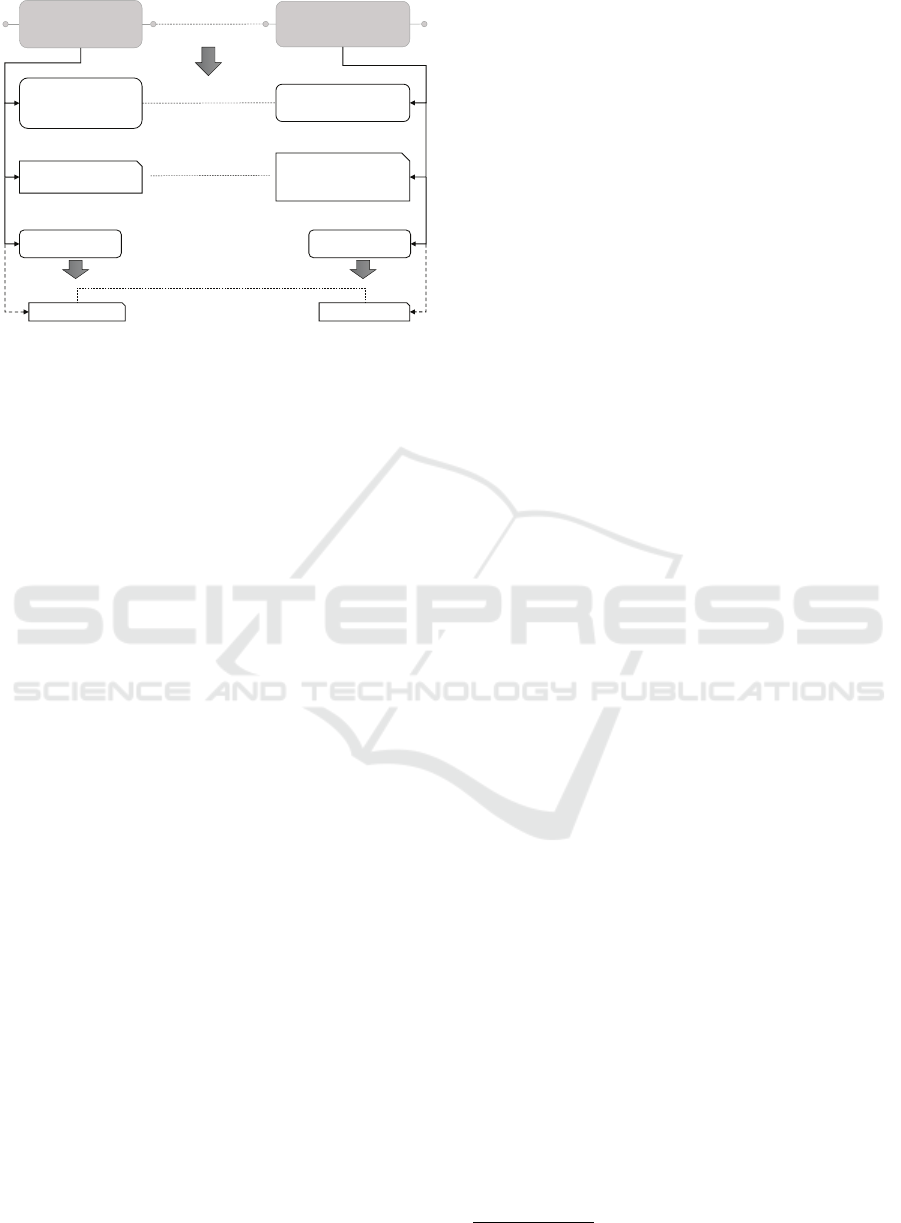
Figure 1: Compatibility calculation between two exemplary
components on the basis of their attributes together with the
different levels of checks: (1) capability matching, (2) con-
straints fulfillment, and (3) implicit specifications checks.
Therefore, a compatibility check can be performed by
comparing the provided attribute values with the con-
straints required by a given component.
In order to check the compatibility between an
image processing component and a pose recognition
component (see Figure 1), three different levels of
checks are required. At the first level, the capabil-
ity of the provided side ImageProcessing must be
subsumed by the capability of the component at the
required side PoseRecognition. Secondly, the con-
straints must be fulfilled. That means the provided
values of the attributes of ImageProcessing must sat-
isfy the constraints specified by the required side. On
this level, a class membership of attribute individuals
(denoted in Figure 1 as Max intensity and Maximal in-
tensity) is also calculated in order to identify that they
belong to the same Attribute-class. In order to unify
the representation of attributes, they are also repre-
sented as TBox axioms.
Afterward, a numerical comparison is performed
in order to check whether the values of the provided
attributes fulfill the given constraints. Finally, implic-
itly deduced information about additional capabilities
such as inferred capability of the component Signal-
Processing is also used for further checks. Implicit
constraint information deduced from the constraint of
the subsuming capability PoseRecognitioncan also be
used for additional checks.
As depicted in Figure 1, given an image pro-
cessing component, represented by proc-individual,
member of the class SoftwareComponent, this com-
ponent provides the capability BilinearInterpolation-
basedImageProcessing. On the other side, given a
pose recognition component represented by an indi-
vidual denoted by ObjViz, member of the class Soft-
wareComponent, this component requires the capa-
bility ImageProcessing. The required capability is
formalized as illustrated in Axioms 4-8 and 21-23.
Since BilinearInterpolation-basedImageProcessing is
subsumed by ImageProcessing, the capability level of
both components is matching. Additionally, the rea-
soner infers implicit attributes related to the subsum-
ing class SignalProcessing such as the ErrorRate is
equal to 10%. Analogically, on the required side (pose
recognition), implicit constraints are derived from the
subsuming capability Perception. For example, the
error rate must be smaller than 3%. This improves
the checking process by delivering more knowledge
about the properties that a component exhibits or re-
quires, which are not explicitly stated at design time.
4 USE CASE
In this section, we demonstrate the applicability of
the proposed semantically enhanced model-drivenap-
proach by means of a use case, in which the applica-
tion developer will be assisted during the engineering
phase of a robotic system in the electronic industry.
In this use case, a robotic system should solder LED
stripes on printed circuit boards (PCB) while the hu-
man operator holds the connection wires between the
soldering points, thus also enabling a close human to
machine cooperation
8
.
Aiming at a flexible automation solution that can
be reconfigured for potential soldering applications
with different process requirements, the application
developer will make a template for the robotic sys-
tem comprising various hardware and software com-
ponents. For example: A robot arm should be used
as actuator to drive the soldering tool to the tar-
get position. By utilizing the placeholder concept,
the application developer can axiomatically formu-
late necessary requirements, e.g., an actuator with 3-
dimensional movementcapability and add them to the
semantic metadata model of its application:
PlaceholderExpression(p1) (24)
Requirement(req1) (25)
requires(p1, req1) (26)
requiresCapability(req1, 3DMovement) (27)
3DMovement ⊑ Capabil ity (28)
requiresCapability ⊑ hasCapability (29)
The placeholder will be semantically processed
and the reasoner is capable to find suitable com-
8
This is one of the three use cases in the ReApp project.
KEOD 2016 - 8th International Conference on Knowledge Engineering and Ontology Development
196
ponents from a knowledge base that fulfill the re-
quirements, e.g. a robot of type UR5 and UR10.
Moreover, the application developer can further re-
strict the component to have a certain accuracy
(Repeatabili ty <= 0.02 m m) for the soldering pro-
cess and a minimum payload to carry the soldering
tool (Payload >= 7kg). Such constraints can be by
defined axiomatically as follows (excerpt):
Requirement(req1) (30)
hasConstraint(req1, cons1) (31)
Constraint(cons1, con s2) (32)
requiresAttribute(cons1, {Repeatability}) (33)
hasOperator(cons1, {SmallerOrEqualTh an}) (34)
hasConstraintValue(cons1, ‘0.02‘) (35)
hasUnitOfMeasurement(co ns1, {mm}) (36)
hasConstraint(req1, cons2) (37)
requiresAttribute(cons2, {Payload}) (38)
hasOperator(cons2, {GreaterOrEqualThan}) (39)
hasConstraintValue(cons2, ‘7‘) (40)
hasUnitOfMeasurement(co ns2, {kg}) (41)
Both candidates UR5 and UR10 fulfill the Re-
peatability constraint, yet not the Payload constraint,
since UR5 can only carry tools up to 5 kg. As a result,
the reasoner will infer that the UR5 does not satisfy
all constraints and answers a placeholder query only
with the robot UR10.
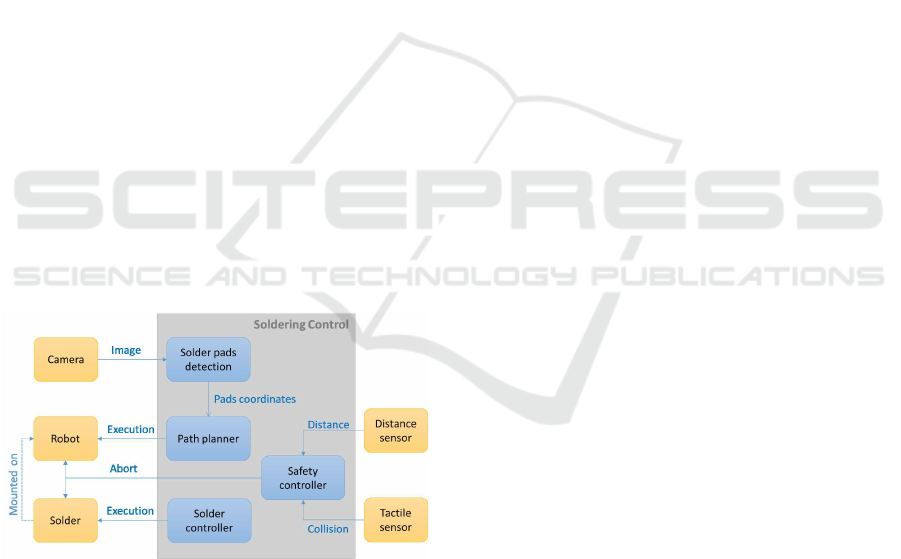
Figure 2: An interaction model of the components in the
soldering application.
To ensure the safety of the production, the appli-
cation developer needs a safety controller which has
to monitor possible collisions between solder tip and
obstacles, and will be fed by on-line distance and tac-
tile information (Figure 2). Moreover, to assure that
the emergency stop can be triggered in time, if any
collision is about to occur, the safety controller re-
quires incoming sensor data with a least frequency
of 500 Hz. During the engineering, to connect the
safety controller with appropriate sensor drivers, the
data type of published distance and tactile informa-
tion must be standard ROS message types to guaran-
tee syntactic compatibility; On the other hand, the fre-
quency of the sensor drivers can be modeled addition-
ally as functional requirement via formal semantics:
hasConstraint(req2, cons3) (42)
hasAttribute(cons3, {Frequency}) (43)
hasOperator(cons3, {GreaterOrEqualThan}) (44)
hasConstraintValue(cons3, ‘500‘) (45)
hasUnitOfMeasurement(co ns3, {Hz}) (46)
The compatibility computation thus provide re-
sults upon which a decision can be made whether a
given sensor driver fulfills the specified requirements.
5 CONCLUSION
This work demonstrates how the model-driven en-
gineering of robotic applications can be synthesized
with ontological semantics and reasoning in order to
enhance the reuse and interoperability of hardware-
and software components. We used description
logic grounded ontologies as knowledge representa-
tion framework as they employ well-understood rea-
soning complexity and tractability. In a first scenario,
the concepts of application templates and placehold-
ers were introduced that allow for the axiomatic
expression of requirements and constraints external
components have to satisfy for collaboration. By in-
terpreting the formal semantics of those axioms, eli-
gible components can be inferred using subsumption
reasoning. We extended this idea in a second sce-
nario and illustrated, how compatibilities between co-
operating components can be inferred by a reasoner
based on the axiomatic descriptions of constraints and
features of components. A distinguishing feature of
the presented approach is that it makes extensive uses
of terminological knowledge in order to fully exploit
the formal model-theoretic semantics of the underly-
ing ontology language in the reasoning process rather
than using rule-based language frameworks.
ACKNOWLEDGEMENTS
This work has been partially funded by the German
Federal Ministry for Economic Affairs and Energy
through the project ReApp (no. 01MA13001) and
by the Ministerium f¨ur Wirtschaft, Arbeit und Woh-
nungsbau Baden-W¨urttembergthrough the Digital In-
novation Center (DIZ Digitales Innovationszentrum).
Empowering the Model-driven Engineering of Robotic Applications using Ontological Semantics and Reasoning
197

REFERENCES
Alonso, D., Vicente-chicote, C., Ortiz, F., Pastor, J., and
Alvarez, B. (2010). V3CMM: a 3-View Compo-
nent Meta-Model for Model-Driven Robotic Software
Development. Journal of Software Engineering for
Robotics (JOSER), 1(January):3–17.
Aßmann, U., Zschaler, S., and Wagner, G. (2006). Ontolo-
gies, meta-models, and the model-driven paradigm.
In Ontologies for software engineering and software
technology, pages 249–273. Springer.
Baader, F., Calvanese, D., McGuinness, D., Nardi, D., and
Patel-Schneider, P. (2003). The Description Logic
Handbook: Theory, Implementation and Applications.
Cambridge University Press.
Bastinos, A. S., Haase, P., Heppner, G., Zander, S., and
Ahmed, N. (2014). ReApp Store - a semantic app-
store for applications in the robotics domain. In Inter-
national Semantic Web Conference (Industry Track).
Brugali, B. D. (2015). Model-Driven Software Engineering
in Practice. pages 155–166.
Carbonera, J. L., Fiorini, S. R., Prestes, E., Jorge, V. a. M.,
Abel, M., Madhavan, R., Locoro, A., Goncalves,
P., Haidegger, T., Barreto, M. E., and Schlenoff, C.
(2013). Defining positioning in a core ontology for
robotics. IEEE International Conference on Intelli-
gent Robots and Systems, pages 1867–1872.
Compton, M., Barnaghi, P. M., Bermudez, L., Garcia-
Castro, R., Corcho,
´
O., Cox, S. J. D., Graybeal, J.,
Hauswirth, M., Henson, C. A., Herzog, A., Huang,
V. A., Janowicz, K., Kelsey, W. D., Phuoc, D. L.,
Lefort, L., Leggieri, M., Neuhaus, H., Nikolov, A.,
Page, K. R., Passant, A., Sheth, A. P., and Taylor, K.
(2012). The ssn ontology of the w3c semantic sensor
network incubator group. Journal of Web Semantics,
17:25–32.
Diaconescu, I.-M. and Wagner, G. (2014). Towards a gen-
eral framework for modeling, simulating and build-
ing sensor/actuator systems and robots for the web
of things. In First Workshop on Model-Driven Robot
Software Engineering (MORSE).
Farges, J.-L. (2009). Robotic Ontology and Modelling - 3rd
version.
Gherardi, L. and Brugali, D. (2014). Modeling and
reusing robotic software architectures: The HyperFlex
toolchain. Robotics and Automation (ICRA), 2014
IEEE International Conference on, pages 6414–6420.
Gil, Y. (2005). Description logics and planning. AI Maga-
zine, 26(2):73–84.
Guerin, K. R., Lea, C., Paxton, C., and Hager, G. D. (2015).
A Framework for End-User Instruction of a Robot As-
sistant for Manufacturing. pages 6167–6174.
Kr¨otzsch, M., Simanˇc´ık, F., and Horrocks, I. (2014). De-
scription logics. IEEE Intelligent Systems, 29:12–19.
Lortal G, Dhouib S, G. S. (2011). Integrating ontological
domain knowledge into a robotic dsl. In 2010 interna-
tional conference on Models in software engineering
MODELS?10, pages 401–414.
Nilsson, a., Muradore, R., Nilsson, K., and Fiorini, P.
(2009). Ontology for robotics: A roadmap. 2009 In-
ternational Conference on Advanced Robotics.
Patel-Schneider, P. F., Motik, B., and Grau, B. C. (2009).
OWL 2 Web Ontology Language Direct Semantics.
W3C recommendation, W3C.
Prestes, E., Carbonera, J. L., Fiorini, S. R., Jorge, V. A. M.,
Abel, M., Madhavan, R., Locoro, A., Goncalves, P.,
Barreto, M. E., Habib, M., Chibani, A., G´erard, S.,
Amirat, Y., and Schlenoff, C. (2013). Towards a core
ontology for robotics and automation. Robotics and
Autonomous Systems, 61(11):1193 – 1204. Ubiqui-
tous Robotics.
Ramaswamy, A., Monsuez, B., and Tapus, A. (2014a). Ar-
chitecture Modeling and Analysis Language for De-
signing Robotic Architectures. International Con-
ference on Control Automation Robotics & Vision
(ICARCV), 2014(December):10–12.
Ramaswamy, A., Monsuez, B., and Tapus, A. (2014b).
SafeRobots : A Model Driven Framework for Devel-
oping Robotic Systems. (Iros):1517–1524.
Ramaswamy, A., Monsuez, B., and Tapus, A. (2014c).
SafeRobots: A Model-Driven Approach for Design-
ing Robotic Software Architectures. Collaboration
Technologies and Systems (CTS), 2014 International
Conference on, pages 131 – 134.
Ringert, J. O., Rumpe, B., and Wortmann, A. (2013). Mon-
tiArcAutomaton: Modeling Architecture and Behav-
ior of Robotic Systems. Workshops and Tutorials Pro-
ceedings of the 2013 IEEE International Conference
on Robotics and Automation (ICRA, pages 10–12.
Schlegel, C., Hassler, T., Lotz, A., and Steck, A. (2009).
Robotic software systems: From code-driven to
model-driven designs. In Advanced Robotics (ICAR)
2009 Intl. Conf. on, pages 1–8.
W3C (2014). RDF 1.1 Concepts and Abstract
Syntax. http://www.w3.org/TR/2014/REC-rdf11-
concepts-20140225/.
W3C OWL Working Group (2012). OWL 2 Web Ontol-
ogy Language Document Overview (Second Edition)
- W3C Recommendation 11 December 2012.
Zander, S. and Awad, R. (2015). Expressing and reasoning
on features of robot-centric workplaces using ontolog-
ical semantics. In IEEE/RSJ Intl. Conf. on Intelligent
Robots and Systems. to be published.
Zander, S., Heppner, G., Neugschwandtner, G., Awad, R.,
Essinger, M., and Ahmed, N. (2016). A model-driven
engineering approach for ROS using ontological se-
mantics. CoRR, abs/1601.03998.
KEOD 2016 - 8th International Conference on Knowledge Engineering and Ontology Development
198
