
Optimized Modal Research for a Manipulator using Bayesian based
Model Updating after Montecarlo-based Sensitivity Analysis
Bin Li
1
, Xi-fan Yao
2
,Shi-yong Chen
1
Department of Mechanical Engineering, Guangzhou Maritime Institute, Guangzhou, China
2
School of Mechanical & Auto Engineering, South China University of Technology, Guangzhou, China
Keywords: Model updating, Finite element model, Monte-Carlo, Bayesian, Sensitivity
Abstract: A procedure to identify the dynamic behavior of a 6 degree of freedom (6-DOF) Manipulator based on
modal data, has been developed in this paper. A finite element reference model with special emphasis on the
modeling of the joints has been built. The most uncertain parameters of the models are updated by minimiz-
ing the discrepancies between the analytical and the experimental natural frequencies of the model. The up-
dated models were tested using modal tests according to Monte-carlo based sensitivity analysis and Beyesi-
an based model reduction.
1 INTRODUCTION
In this paper, we investigate the application of the
Expectation Maximization (EM) algorithm to opera-
tional modal analysis of a 6-DOF manipulator. The
mechanical behavior of structures with multi- DOF
are idealized in the analysis as interconnected linear
elements. However, the response of the zone is more
complex and design-dependent, being directly af-
fected by a joint connection. In the past, joints were
considered as rigid. This assumption greatly simpli-
fies the analysis, but it does not accurately reflect the
true behavior of the joints. In practice, rigid joints
exhibit some flexibility. Therefore, adequate model-
ing and calibration of the joints is essential in the
structural design.
The mechanical behavior of the manipulator
can be obtained through detailed 3D finite element
(FE) models. Analytical models like the component
method are also extensively
used to characterize the
joints. These models should be validated or calibrat-
ed through data coming from experimental tests.
Thus, the joints are modeled as linear spring el-
ements for the analysis of the structural serviceabil-
ity limit state. This approach based only on the mo-
ment-rotation stiffness is adequate for static analysis.
In the dynamic case, however, it could give inaccu-
rate predictions. This is due to the fact that the ge-
ometry and inertia of the joint and the influence of
the connection on the mechanical properties of the
adjacent elements have a significant effect on the
structural response. Therefore, these features should
be considered in the joint modeling.
In the present work, a particular manipulator is
experimentally and analytically studied. The aim of
the paper is a proper modeling of the corresponding
joint by means of an FE model comprising beam
elements. It is intended to be understood as a whole,
considering not only the moment-rotation stiffness
of the joint but also its inertia, geometry and its in-
fluence on other elements. Once modeled, the aim is
to calibrate and validate the proposed models. In this
phase, the most uncertain parameters are selected
and updated on the basis of experimental data differ-
ent to those used in testing. For this purpose, two
different experimental models and testing proce-
dures are proposed. The first one consists of a cross-
like simple supported frame that is dynamically test-
ed in two different support configurations. The sec-
ond is a semi-portal frame that is statically tested.
One of the dynamic tests is used for updating, while
the other and the static test are used for testing. The
updating is proposed as the minimization of a given
fitting function, which accounts for the discrepancies
between the analytical and experimental models. A
novel adaptive sampling procedure based on values
of the fitting function is tried for minimization.
The portal axle is a gearbox that is specially de-
signed for off-road driving conditions. It is installed
between the wheel and the axle shaft to give higher
ground clearance to the vehicle. The
modeling and
257
Chen S., Li B. and Yao X.
Optimized Modal Research for a Manipulator using Bayesian based Model Updating after Montecarlo-based Sensitivity Analysis.
DOI: 10.5220/0006448602570262
In ISME 2016 - Information Science and Management Engineering IV (ISME 2016), pages 257-262
ISBN: 978-989-758-208-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
257

simulation of spur gears in portal axle is important to
predict the actual motion behavior. However, gear
train design in portal axle is difficult to study com-
prehensively due to their relatively low cost and
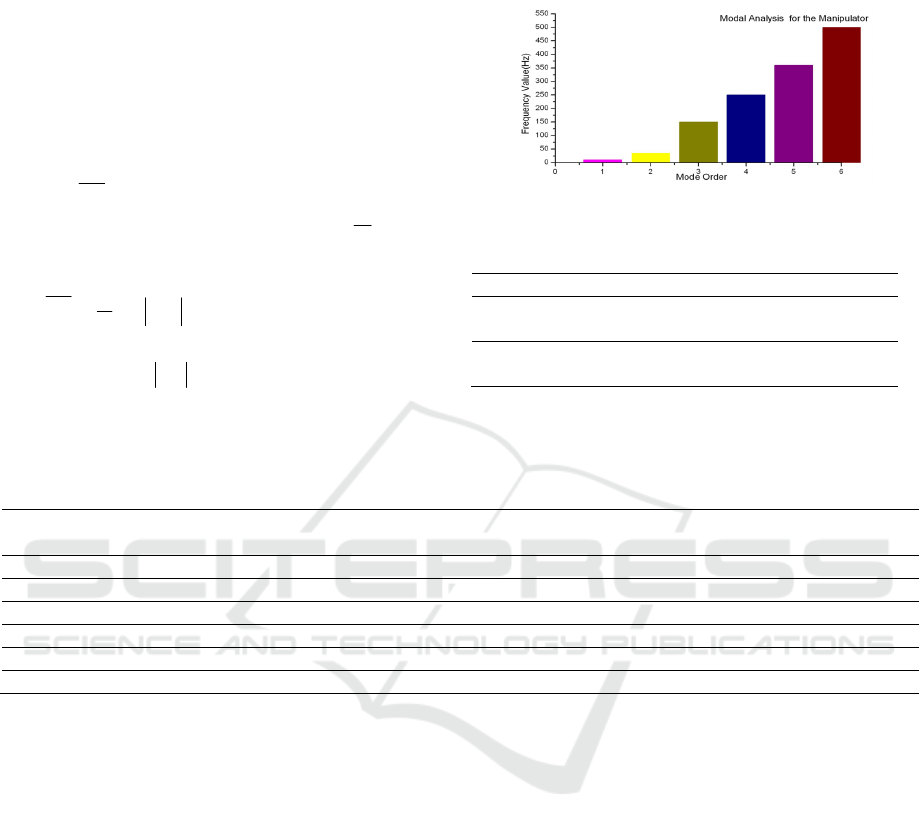
short product life cycle. In this study, modal analysis
of 6-DOF manipulator is simulated using finite ele-
ment method (FEM). Modal analysis is simulated on
three different combinations of gear train system
commonly designed for portal axle. FEM static
stress analysis is also simulated on three different
gear trains to study the gear teeth bending stress and
contact stress behavior of the gear trains in different
angular positions from 0° to 18°. The single and
double pair gear teeth contact are also considered.
This methodology serves as a novel approach for
gear train design evaluation, and the study of gear
stress behavior in gear train which is needed in the
small workshop scale industries.
2 MATHEMATICAL MODELS
The normal structural general equation of motion is
denoted by:
)}({}]{[}]{[}]{[ tFxKxCxM =++
&&
(1)
Where
][M
is the mass matrix,
][K
stiffness ma-
trix,
][C
damping matrix,
][F
external incentives,
}{x
displacement matrix,
}{x
&&
acceleration matrix.
Modal analysis in ANSYS software is linear (Wei,
2002), and any plastic、large deformation and non-
linear deformation are ignored, while the material of
the structure can be linear or non-linear, isotropic or
orthotropic, constant or temperature related, so for
linear structures, the Eq. (1) can be simplified as:
)cos(}{}{ tx
ii
ω
φ
=
(2)
Where,
i
φ
is the vibration mode (eigenvector);
i
ω
is the natural circular frequency for vibration
type and the following equations can be obtained:
0)cos(}]{[
)cos(}]{[)cos(}]{[
2
=+
+−
tK
tCtM
ii
iiiii
ωφ
ωφωφω
(3)
While
0=
i
φ
is insignificant, so Eq.(3) can be
simplified as follows:
[]
{} {} {}
[]
n
φ
φ
φ
φ
,,,
21
K=
(4)
Through coordinate transformation for the nor-
mal mode matrix, the modal coordinates can be ex-
pressed as follows:
{}
[]
{} {}
∑
=
==
n
i
i
i
x
1
φλλφ
(5)
Where,
{}
λ
is the weighting factor for the linear
superposition of main modes among
n-dimensional
space, and it can be proved to be orthogonal:
{} { }
T
n
λλλλ
,,,
21
K=
(6)
Thus the kinetic energy of the system can be ex-
pressed as:
[] []
⎭
⎬
⎫
⎩
⎨
⎧
Μ
⎭
⎬
⎫
⎩
⎨
⎧
=
⎭
⎬
⎫
⎩
⎨
⎧
Μ
⎭
⎬
⎫
⎩
⎨
⎧
=Ε
•
Τ
••
Τ
•
λλ
2
1
2
1
xx
e
(7)
While
[
]
{}
[
]
{}
φφ
Μ=Μ
Τ
(8)
And
rr
r
m
φφ
Μ=
Τ
is the r-order modal mass,
that is its generalized mass for the corresponding
coordinates. Similarly, the system potential energy
can be expressed as:
{}
[]
{} {}
[]
{}
λλ
Κ=Κ=Ε
ΤΤ
2
1
2
1
xx
u
(9)
While
[
]
{}
[]
{}
φφ
Κ=Κ
Τ
(10)
Where
rr
r
φφκ
Κ=
Τ
is the r-order modal stiffness,
also the generalized stiffness for the corresponding
coordinate. Substitute it in the Lagrange equation
{} {}
{}
Ν=
∂
Ε
−
Ε
∂
−
∂
Ε
−
Ε
∂
λλ
)()(
ueue
dt
d
(11)
Given generalized the force
{}
0=Ν
, then:
[] []
{}
0=+
⎭
⎬
⎫
⎩
⎨
⎧
••
λκλ
ii
m
(12)
Converting it to independent expression:
0
2
=+
ii
ηλ
(13)
Where is the r-order system natural frequency.
Then, one particular solution of the free vibration
system would be:
{} {}
)sin(
ii
ii
tx
θ
η
φ
+=
(14)
With superposition, the solution of the whole system
would be:
{} {}
∑
=
+=
n
i
iii
tx
1
)sin(
θηφ
(15)
After transformation coordinate with regular
modal matrix, we can get the solution of the whole
system:
{}
[]
{}
λ
φ
=x
(16)
i
i
i
m
κ
η
=
ISME 2016 - Information Science and Management Engineering IV
258
ISME 2016 - International Conference on Information System and Management Engineering
258

The test results for the manipulator using this
equator as following:
Figure 1: The velocity lines
3 MODEL UPDATING
Several methods of structural model updating have
been proposed and the topic is still under active
study in various areas. Most of these studies cen-
tered on approaches such as the optimal matrix up-
dating, eigen-structure assignment algorithms and
neural-networks updating methods. In this paper, the
model updating technique was described in detail
and updated parameters from the FE model were
compared to the original ones. It was presented the
theory of bayesian-based model updating with a
special focus on the properties of the solution that
result from the combination of montecarlo-based
sensitivity analysis with model reduction.
It should be attempted to assess the sensitivity
which can be attributed to various features of the
model. For example, joints and constraints could be
considered to be less accurately modeled, and there-
fore they are in greater need of updating. The pa-
rameterization of the inaccurate parts of the model is
important. The numerical predictions (e.g. natural
frequencies and
mode shapes) should be sensitive to
small changes in the parameters. Experimental re-
sults show that natural frequencies are often
significantly affected by small differences in the
construction of joints in nominally identical test
pieces. However, it can be very difficult to find joint
parameters to which the analytical predictions are
sensitive. If the analytical response is insensitive to
changes in one or several updating parameters, then
updating will result in unrealistic values for rest of
updating parameters. The result, in this case, will be
an updated model which replicates the measure-
ments but lacks physical meaning.
Normally, the numerical model is incompatible
with the experimental modal one, therefore, in order
to make both of the two models more consistent, it is
necessary to modify the model by reducing the finite
element one, or by extending the experimental mod-
al one. And the reducing way will be much fast, so
here we use the reducing way. So the main goal for
the model update is to make the tolerance from the
errors between the frequencies obtained experimen-
tally and theoretically equal to zero. But, it is a
difficult process because of the uncertainties from
the structural parameters such as the elasticity modu-
lus, mass density, boundary conditions, etc.
For this aim, this study denotes updating a finite
element model by following a process of following
substeps: (i) montecarlo-based sensitivity analysis;
(ii) bayesian based model updating.
3.1 Monte-Carlo based Sensitivity
Analysis
Sensitivity analysis includes local sensitivity analy-
sis methods and global sensitivity analysis. The first
one includes differential method, finite difference
method and perturbation method, which has clear
concept to facilitate the calculation. It has long been
widely used in engineering, but only being applied
in linear or non-strong nonlinear systems (Kang,
1990). But Global sensitivity analysis (Yu, 2004),
such as Monte Carlo method, also known as stochas-
tic simulation method, is a theory based on statistical
sampling, we random sample from probability dis-
tribution of an input known model to construct ran-
dom variables, then we get digital characteristics
resulting from its response (Zhou, 1997; Xiao, 2003;
Zhang, 2008), and which can be used for more com-
plex models, the analysis principle is outlined as
below:
Assuming that in the spatial domain
Ω
(Wang,
2003; Yan, 2003; Rulka, 2005), the system response
function
Δ
can be expressed as the integral of the
function f, and there exists an non-zero probability
density function
ρ
, as following:
)()
);,(
);,(
(
);,(
);,(
);,(
);,(
ΦΕ=Ε=
==Δ
∫∫
λρ
λ
λρ
λρ
λ
λ
xt
xtf
dxxt
xt
xtf
dxxtf
aa
(17)
Wherein:
);,(
);,(
λρ
λ
xt
xtf
=Φ
, t is the time,
),,,(
21 n
xxxX L=
the random input variable vec-
tor decided by a probability density function
ρ
, n
the
number of input variables,
λ
a sys- tem parameter.
let, then
Δ
can be approxi-If
mately estimated by the mean
i
φ
generated from N
random sample, that is:
Optimized Modal Research for a Manipulator using Bayesian based Model Updating after Montecarlo-based Sensitivity
Analysis
259
Optimized Modal Research for a Manipulator using Bayesian based Model Updating after Montecarlo-based Sensitivity Analysis
259

∑
=
≈Δ
N
i
i
N
1
1
φ
(18)
The sensitivity of the system response function
Δ for the parameter
λ
can be expressed as:
∑
=
∂≈Δ∂
N
i
i
N
1
1
φ
λλ
(19)
3.2 Bayesian based Model Updating
Model modification is actually a mathematical in-
verse problem, there are several methods, and La-
grange multiplier method of direct correction matrix
has the following deficiencies:
①using experi-
mental modal vectors to correcting mass and stiff-
ness matrix. But Experimental modal vectors and the
number of DOF are much less than the calculated
model, so they must be extended;
② the error is
large normally;
③the sparsity from original mass
matrix and stiffness matrix may doesn’t exist any
longer;
④elements as zero may no longer be zero
from the original mass matrix and the stiffness ma-
trix, which may not be accordance with the actual
situation;
⑤ false modal (Spurious Modes) may
occur.
Therefore, the physical parameter modification
method based on sensitivity analysis is commonly
used in engineering, and there are two methods gen-
erally, such as: direct derivation and ad-joint struc-
ture method. Direct derivation, was first proposed by
Fox and Kappor. Adjoint structure method first pro-
posed by Van Bell and later improved by Van
Bonacker, it is coming from electronics (adjoint
network theory), which using the similarity between
Lurgan theorem (Tellegen's Theory) from electron-
ics and the virtual work principle from structural
mechanics. the structure sensitivity formula can be
obtained after analysis the original structure and the
accompanying one, through choosing dynamic char-
acteristics of the structural elements from the origi-
nal structure same as the one which has same topol-
ogy (structure) and geometry. But the calculation
with ad-joint structure method is more complex. So
this paper denotes a method combination with direct
derivation method.
There are three related requirements between the
finite element model and experimental modal model:
①modal frequencies must consistent; ②mode
shapes must consistent;
③frequency response must
consistent. These three factors can be weighted us-
ing Bayesian method when constructing the error
function based on the sensitivity analysis.
Bayesian approach lies in that using all known
information such as: the prior distribution of the
state and contact status, and also using the likelihood
function observed and of to construct the posterior
probability density for state variables of the system.
The main solution steps are as follows:
1) The first step, combined with a first-order
Markov process:
)(),(
1-1-:11- iiiii
xxxx ││ Ρ=ΚΡ
(20)
Priori probability density of the state space of the
system model:
11-:111-1-:1
)()()(
−−
Κ=ΚΡ
∫
iiiiiii
dxxpxxpx │││
(21)
2) The second step, using the nearest observation
for modifying the formula to obtain the posterior
probability density:
)(
)()(
)(
1-:1
1-:1
:1
ii
iiii
ii
xp
xpxp
x
Κ
ΚΚ
=ΚΡ
│
││
│
(22)
The formula above is the optimal Bayesian esti-
mation, wherein,
i
x is the state for the system at the
moment
i ,
i:1
Κ
the observation sequence from the
initial moment to moment
i
,
)(
:1ii
x ΚΡ │
the likeli-
hood of the posterior probability density function.
Therefore, the linear model updating mathemati-
cal expressions:
{}{}
yx Δ=Δ
Ζ
(23)
Wherein,
[]
Ζ
sensitivity matrix of
nm ×
dimen-
sional;
{}
xΔ
the difference between model updating
parameters and the initial value;
{}
yΔ
the difference
between the eigenvalue tests from experiment model
and the calculated values of the finite element mod-
el, which containing the test errors
{}
ε
and calcula-
tion errors, here ignored the calculation errors ,and
assumes
{}
xΔ
,
{}
ε
obeys the normal distribution when
its mean is
υ
,and they are independent on each oth-
er, here we have the following formula [24]:
{}{}
[
]
[]
y
U
σεε
=Ε
Τ
{}{}
[
]
[]
x
Uxx
σ
=ΔΔΕ
Τ
{} { }
0=Δ
Ε
=
Ε
x
ε
{}{}
[
]
{}
0=ΔΕ
Τ
ε
x
(24)
Wherein,
[]
x
U
σ
the covariance of
{}
xΔ
,
[
]
y
U
σ
the
covariance of
{}
ε
, and the joint probability density:
{}{}
[]
[]
{}
[]
{}{}
[]
{}
⎥
⎦
⎤
⎢
⎣
⎡
+ΔΔ−
=ΔΡ
−Τ−Τ
+
)(
2
1
exp
)2(
1
),(
11
2
εε
π
ε
yx
yx
mn
UxUx
UU
x
(25)
To have maximal value, first we need to solve the
following:
{}
[]
{}{}
[]
{}
)min(
11
εε
−Τ−Τ
+ΔΔ
yx
UxUx
(26)
ISME 2016 - Information Science and Management Engineering IV
260
ISME 2016 - International Conference on Information System and Management Engineering
260
And substitute formula (24) to formula (26) into
it, and differentia it, then we get:
{} { } {}
ε
Λ+=
0
ˆ
xx
(27)
Wherein,
{}
[]
{}
[] []
[]
1
1
11
)(
−Τ
−
−−Τ
Ζ+ΖΖ=Λ
yxy
UUU
(28)
Cause the correction model is the same im-
portant, we define three indicators to control its
quality: the average relative error of the modal fre-
quency
fΔ
, the maximum relative error
max
fΔ
, the
correlation coefficient of average modes
ℜ
, which
are indicated as follows:
∑
=
Δ=Δ
n
k
k
f
n
f
1
1
,
nkfMaxf
k
,,2,1),(
max
L=Δ=Δ
, (29)
The proposed algorithm is tested on the model of
6-DOF manipulator. The results for both initial
model and revised model are shown in Fig 2, Table1
and 2.(here took six modes):
Figure 2: The Frequency Response
Table 1: The finite element model updating Controll index
o
rde
r
f
Δ (%)
max
f
Δ
(%)
ℜ
Before
revising
1~6 9.904 26.02 92.06
After
revising
1~6 0.817 3.29 89.31
Table 2: The comparison of the natural frequencies of the frame model before and after the update.
4 CONCLUSION
This paper addresses a method based on sensitivity
which is developed for modal analysis. For this pur-
pose, one example of a 6-DOF manipulator is select-
ed to demonstrate the efficiency of the proposed
method.
The model is investigated under five subtitles:
analytical modal analysis, experimental measure-
ment, comparison of the experimental and initial
analytical natural frequencies, application of the
developed modelupdating method using the platform
of Grid computing and comparison of the results.
It is observed that there are differences in the
natural frequencies obtained from experimental
measurement and initial analytical modal analysis of
the model because of the uncertain structural param-
eters. So, the model is updated using the proposed
model updating method.
According to the results of the study, the values
of each selected parameter are attained to reflect the
real condition of the models in terms of the dynamic
behavior. The average error in the natural frequen-
cies is decreased from 9.904% to 0.817% for the
6-
DOF manipulator by using the developed model
updating method. In consequence, the proposed al-
gorithm gives better solutions for model updating
compared to the initial values.
ACKNOWLEDGEMENTS
The research was sponsored by the National Natural
Science Foundation of China (Project No.
51175187).
No. initial calculate
modal values=a
experimental
modal values=b
Difference=a-b
(confidence)
Correction
modal value=c
Difference=c-b
(confidence)
1 2.35 5.68 -3.33(36.2%) 3.39 -2.29(92.3%)
2 37.94 42.57 -4.63(89.6%) 43.94 -1.37(97.1%)
3 173.19 181.23 -7.04(93.6%) 178.35 .2.87(98.6%)
4 273.01 273.01 0(46.6%) 273.02 0.01(82.01%)
5 345.68 340.19 4.49(93.6%) 342.68 1.49(98.9%)
6 437.19 398.22 38.97(93.6%) 400.34 2.12(97.6%)
Optimized Modal Research for a Manipulator using Bayesian based Model Updating after Montecarlo-based Sensitivity
Analysis
261
Optimized Modal Research for a Manipulator using Bayesian based Model Updating after Montecarlo-based Sensitivity Analysis
261

REFERENCES
Kang, Z, Wang. Y, 1990, Sensitivity analysis method of
the dynamic optimal design for mechanical systems.
Journal of Vibration Engineering, China.
Rulka, W, Pankiewicz. E, 2005, MF3S approach to gen-
erate equations of motions for simulations in vehicle
dynamics,Multi-body System Dynamcis.
Smiths. F, Roussillie O. 2001, Sensitivity analysis in the
migration of radionuclides: differential Monte Carlo
versus double randomization. Mathematics and Com-
putersin Simulation.
Wang. Q, Liu. G, Wen.L, 2003, Reliability of crane struc-
ture based on Monte Carlo and finite element method
Journal of Wuhan University of Technology: Trans-
portation Science&Engineering.
Wei X., 2002,The finite element analysis software -ANSYS
Comprehension and Practice, China Water-Power
Press. BeiJing.
Xiao. G, Li H, 2003, Monte Carlo method in systematic
reliability Analysis, Science Press. Beijing, China.
Yan. B, Wang. L, Hu. J, 2003, Flexible model of multi-
axle vehicle ride comfort. Chinese Journal of Mechan-
ical Engineering.
Yu. J, Li. R, 2004,Application of Sobol' method to sensi-
tivity analysis of a non-linear passive vibration isola-
tors, Journal of Vibration Engineering, China.
Zhang. L, Bong. G, Shen. H, 2008, Robustness analysis of
planetary gear mechanism based on Monte Carlo
method. Journal of Mechanical Transmission.
Zhou. B, Dung. W, Tan. M, 1997,An analysis of addition-
al fluctuation of crankshaft torque and speed by using
Monte-Carlo simulation. Chinese Internal Combustion
Engine Engineering .
ISME 2016 - Information Science and Management Engineering IV
262
ISME 2016 - International Conference on Information System and Management Engineering
262
