
The Improved Harris Operator based on Steerable Filter
Lin Zhang, Jinfeng Lu, Jing Wang, Yangyu Wu, Zijuan Jiang
College of Bioresources Chemical and Material Engineering, Shaanxi University of Science and Technology, Xi' an,
P R China
zhanglin@sust.edu.cn
Keywords: Corner detection, Harris operator, Steerable filter, Gray image.
Abstract: The conventional Harris corner detection operator is improved to enhance the missing rate and the detection
capability of false corners in this paper. With the materials recognition on automated logistics and
packaging line as an example, the acquired images were firstly pretreated to achieve the grayscale images.
The rotations of four different angles were performed by the steerable filter based on the grayscale and the
corner points were detected. Finally the authenticity corner points were determined through the integrated
logic operations. The image data pre-processed was detected using the improved Harris corner operator and
compared with the data by the traditional corner detection operator. The false detection rate was decreased
to 1.3 % and the missing rate reduced to 2.9% in the experiment. The results show that the improved
operator has a strong capability of discerning authenticity angular point and this method can effectively
improve the recognition accuracy of corner detection operator.
1 INTRODUCTION
Angular point is generally defined as the area in
which the grey value of image changes the most. By
detecting the angle point, the image can be
abstracted and replaced only through the typical
points. The image data volume is greatly reduced
and the speed and efficiency of image processing
were improved considerably (Chen, Lyu and Ding,
2005). Corner detection is a method of image
features extraction for computer vision system and is
used widely in the motion detection, image
matching, video tracking, 3D modelling and target
recognition, etc.
At present the corner detection algorithm can be
classified into two categories: the corner detection
based on image edge (Lee, Sun and Chen, 1995;
Beus, Steven and Tiu, 1987) and based on gray
image (Barbara, Jaroslav and Gabriele, 1999). The
corner detection based on image edge to a large
extent depends on image edge detection and image
segmentation. But the two operations have a great
deal of difficulty to achieve the good results. For
example, it is difficult to detect the complete edges
when it subjects to the local shelter or overlapping
situations, so that the scope of application is
restricted. The corner detection based on gray image
avoids this problem tactfully, and the corner is
detected by checking the gray variation of
neighborhood, and mainly by computing the gradient
and curvature. A successful corner detection
operator should be able to detect all the real angular
point. Harris operator is a recognized corner
detection algorithm for gray image, but the choice of
its threshold has a great deal of uncertainty due to
without clear theory regulation, just according to the
experience or the experiment (Harris and Stephens,
1988). Harris corner detection algorithm is widely
used in various fields. Yang et al. (Yang, Ning and
He, 2011) used Harris operator to study grains with
characteristics of tips such as corn, squash and
pumpkin for identifying tips. Wang et al. reflected
precisely the geometry quality changes of the remote
sensing image before and after compression through
Harris corner detection algorithm (Wang, Yang and
Wu, 2011). Various cases proved that Harris corner
detection operator had good angular point
recognition, but it still exist some shortage and need
to be improved.
Liu et al. put forward an improved Harris corner
detection algorithm based on image edge for fault
detection and residual angular point. The experiment
results proved that the corner detection algorithm
305
Jiang Z., Wu Y., Wang J., Lu J. and Zhang L.
The Improved Harris Operator based on Steerable Filter.
DOI: 10.5220/0006449503050311
In ISME 2016 - Information Science and Management Engineering IV (ISME 2016), pages 305-311
ISBN: 978-989-758-208-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
305

had higher accuracy (Liu, Zhao and Sun, 2013).
Fang et al. used double mask to set the local scope of
the non-maximum inhibition combined with k-
means clustering method for the non-maximum
inhibition. This method overcame the lost or
redundancy of angular point caused by uncertainty
of the traditional Harris corner detection algorithm
which selected the threshold value based on the
experience and improved the precision of corner
detection (Fang, Wang and Niu, 2011). Wang et al.
put forward a similar angular point algorithm for the
T shape and inclined T shape whose positions were
not accurate with low arithmetic speed. The
experimental results showed that the improved
algorithm was more suitable for real-time
demanding (Wang, Tang, Ren and et al., 2008).
Zhang et al. built a new Harris multi-scale corner
detection algorithm based on the wavelet transform
for defect of Harris operator without scales change
(Zhang, Li and Yang, 2007).
The paper proposed a corner detection algorithm
with improved Harris operator based on steerable
filters with material identification on the automatic
logistics packaging line as example. The improved
Harris operator, traditional Harris operator and
classical Susan operator were compared on error
detection rate and miss rate. The experiments proved
that the improved Harris operator was a good way to
reduce the error detection rate and the miss rate of
angular point.
2 HARRIS OPERATOR
The logic behind the Harris corner detection
algorithm (Harris and Stephens, 1988; Beis and
Lowe, 1997) is that, the image intensity will change
significantly in multiple directions at a corner, while
the image intensity will change greatly in a certain
direction at an edge. This phenomenon can be
formulated by examining the changes in intensity
resulting from shifts in a local window. Around a
corner point, the image intensity will change greatly
when the window is shifted in an arbitrary direction.
While around an edge point, the image intensity will
change greatly when the window is shifted in the
perpendicular direction. Following this intuition, the
Harris detector uses a second order moment matrix
as the basis of its corner decisions. Unless otherwise
specified, all corner points and edge points detected
by the Harris corner detector are hereafter referred to
Harris corner interest points.
For a given image I, its autocorrelation matrix M
at point
(, )
x
y can be calculated as:
2
2
,
I(, ) II(, )
M(,)= (,)
II(, ) I(, )
xxy
xy
xy y
x
yxy
xy xy
x
yxy
ω
⎡
⎤
⎢
⎥
⎢
⎥
⎣
⎦
∑
(1)
Where I
x
and I
y
is the respective derivative of pixel
intensity in the x and y direction at point (x, y). That
is,
[
]
II 1,0,1 I/
x
x
=
⊗− ≈∂∂
(2)
[
]
II 1,0,1 I/
T
y
y
=
⊗− ≈∂∂
(3)
Where the operator
⊗
denotes convolution.
The off-diagonal entries are the product of I
x
and
I
y
, while the diagonal entries are squares of the
respective derivatives. The weighting function
(, )
x
y
ω
can be uniform, but it is more typically an
isotropic, circular Gaussian:
22
2
1
( , ) ( , , ) exp( )
22
x
y
xy gxy
ωσ
πσ σ
+
== −
(4)
It assigns more weight to those values near the
center of a local region. As it turns out, the matrix
M(x, y) describes the shape of the autocorrelation
measure as a result of the shifts in window location
(Harris and Stephens, 1988; Beis and Lowe, 1997).
Let α and β be the eigenvalues of M(x, y), and then
these values can provide a quantitative description of
how the autocorrelation measure changes in space,
its principal curvatures. According to the
eigenvalues of the autocorrelation matrix, the image
regions can be divided into three categories as
follows (Harris and Stephens, 1988; Beis and Lowe,
1997):
1. Plain regions: α≈0 and β≈0. Both eigenvalues
are small, thus the intensity variation is negligible in
any direction. In this case, the region can be
considered almost plain;
2. Edges: α》β. The difference between the two
eigenvalues is large, which implies that the intensity
variation is noticeable only in one direction, i.e., the
edge gradient direction;
3. Corners: α≈β, with αβ》0. Intensity variation
is strong along all directions, which is usually
achieved by ‘small spot’ regions.
The (α, β) space can be divided into three regions
by the heavy lines (Harris and Stephens, 1988; Beis
and Lowe, 1997). However, aside from the corner
and edge classification regions, a measure of their
quality or response is also needed. Note that the
product αβ is sensitive to corners, while the sum
ISME 2016 - Information Science and Management Engineering IV
306
ISME 2016 - International Conference on Information System and Management Engineering
306

α+β is sensitive to both edges and corners. Besides,
the determinant and the trace of a general
diagonalizable matrix agree with the product and the
sum of its eigenvalues, respectively, i.e.,
()
()
22
tr M , I ( , ) I ( , )
xy
x
yxyxy
αβ
=+= + (5)
()
()
22 2
detM , I(, )I(, ) (II(, ))
xy xy
x
yxyxyxy
αβ
== ⋅ −
(6)
Therefore, it is attractive to use
tr(M( , ))
x
y
and
det(M( , ))
x
y
to measure the corner response since it
avoids the explicit eigenvalue decomposition of
M(x, y). The corner response can be measured using
Eq. (7) (Harris and Stephens, 1988; Beis and Lowe,
1997).
22
( , ) det(M( , ))- tr (M( , )) ( )Rxy xy k xy k
α
βαβ
=⋅=−⋅+
(7)
Where k is a scalar value empirically chosen from
the range [0.04,0.16]. Corner points have large
positive eigenvalues and hence a large Harris
measure response. Thus, corner points that are
greater than a specified threshold are identified as
local maxima of the Harris measure response, i.e.,
{
}
{
}
(, ) (, ) (, ) (,),(,) (, ),(, )
cc cc cc ii ii cc cc th
x
y xy Rxy Rxy xy Wxy Rxy t=>∀∈ >
(8)
Where {
(, )
cc
x
y
} is the set of all corner points,
(, )
cc
Rx y
is the Harris measure response calculated at
point (x, y);
(, )
cc
Wx y
is an 8-neighbor set centered
around the point
(, )
cc
x
y
, and
th
t
is a specified
threshold. Obviously, the number of detected Harris
corner points depends on the threshold
th
t .
Above all, Harris operator is a kind of efficient
point feature extracting operator with simple
algorithm and low time-consuming(Harris and
Stephens, 1988; Beis and Lowe, 1997). The operator
only needs to calculate the first-order difference and
filtering on the basis of gray level and the operation
is simple. The point feature information is relatively
uniform, and the Harris operator calculates the
interested values for all points in the image, and then
performs the optimal selection in the neighborhood.
The algorithm process is relatively stable, and
involves only a derivative operator calculation, not
affected by the image rotation, noise and perspective
transformation easily (Harris and Stephens, 1988;
Beis and Lowe, 1997). But it has also some
irremovable drawbacks. It is very sensitive to the
changes of scale, and does not have scale invariance.
Extraction of angular point level is pixel level. The
positioning accuracy is poor and is easy to miss
some practical angular point. It is necessary for the
maximum inhibition, and the extraction accuracy of
angular point depends on the set threshold. If the
threshold setting is too big, it will cause the loss of
angular point information. If the threshold setting is
too small, it will cause a lot of false corners
extracted (Harris and Stephens, 1988; Beis and
Lowe, 1997).
3 STEERABLE FILTER
Steerable Filter was put forward as a filter design
method of Fourier series expansion in 1991 by
Freeman (Stephen and Smith, 1997) based on polar
coordinates (r, θ). It is adopted as a linear
calculation of convolution. The basic idea is that the
filter along arbitrary direction can be expressed as a
linear combination of a set of base filter functions.
Image after responded by filter in one direction can
be showed by a set of linear combination of the base
filter response. This can avoid the repeated
convolution operation, thus reducing the
computational complexity.
Steerable filter has the function of arbitrary
rotation and can be represented by a linear
combination of the fixed base filter for any direction.
Therefore it can accurately detect the target features
such as edge, texture and singular point. The base
filter corresponding to the steerable filter is a set of
filters having certain overlap between each other in
the frequency domain. And each filter can be
expressed as the form of the angle rotating to a
certain way for steerable filter. The basic idea is to
produce a rotating steerable filter based on a linear
combination of filter from a fixed set. The structure
of a universal steerable filter was shown in
Figure 1.
It is defined as the following form: if a filter
Figure 1: The basic structure of the filter steerable
Image
Image
after
filter
()
m
K
θ
The based
filter
The
Interpolatio
n Function
The Improved Harris Operator based on Steerable Filter
307
The Improved Harris Operator based on Steerable Filter
307
(, )
f
xy
θ
can rotate, the rotation
(, )
f
xy
θ
in any
direction
θ
is as Eq. (7).
1
(, ) () (, )
m
M
m
m
f
xy K f xy
θ
θ
θ
=
=
∑
(9)
Where
(, )
f
xy
θ
- based filter, M – the number of
filter,
()
m
K
θ
- the interpolation function.
A given function f is determined in the polar
coordinate (
22
,arg(,)rxy xy
θ
=+ =
). And f
after the rotation can be expressed as the function of
a Fourier series in the polar angle
ψ
.
(, ) ()
N
j
n
n
nN
f
rare
ψ
ψ
=−
=
∑
(10)
Where j=-1, N-discrete distance.
This method has a certain requirements on the
direction angle of the directional derivative filter
with a rotation angle. The filter function must be
continuous, otherwise this method will not be
applied. The solution process for the algorithm is
complex, and the computation is larger. It cannot be
directly used in industrial automation geometry
image identification and is usually combined with
other operator for application, such as combining
pyramid algorithm for face recognition (William and
Edward, 1991). In the paper, the angle corner in any
rotation direction can be expressed as a linear
combination of the same group of base filter by
using steerable filter.
4 THE IMPROVED HARRIS
OPERATOR
For the uncertainty of image rotation due to selecting
threshold of Harris operator, the paper improved the
Harris corner detection operator using rotation
invariance of steerable filter. The rotation of
different direction by steerable filter was increased
during the detection of Harris operator, and the
Harris test was. Finally the authenticity angular point
of all directions was determined by logic operations.
4.1 The algorithm process
Harris corner detection needs to set the threshold for
the non-maximum inhibition, and the accuracy of
extracting angular point depends on the setting
threshold (Xie, Zhan and Jiang, 2003; Du, Wen and
Chen, 2009). If the threshold setting is too large, the
angular point information will be lost; if the
threshold setting is too small, it will cause a lot of
false corners extracted, such as some image noise
(Xie, Zhan and Jiang, 2003; Du, Wen and Chen,
2009). The traditional Harris operator sets threshold
according to the experience and there is large
uncertainty so that it causes some false detection of
non-angular point and leak detection of actual
angular point.
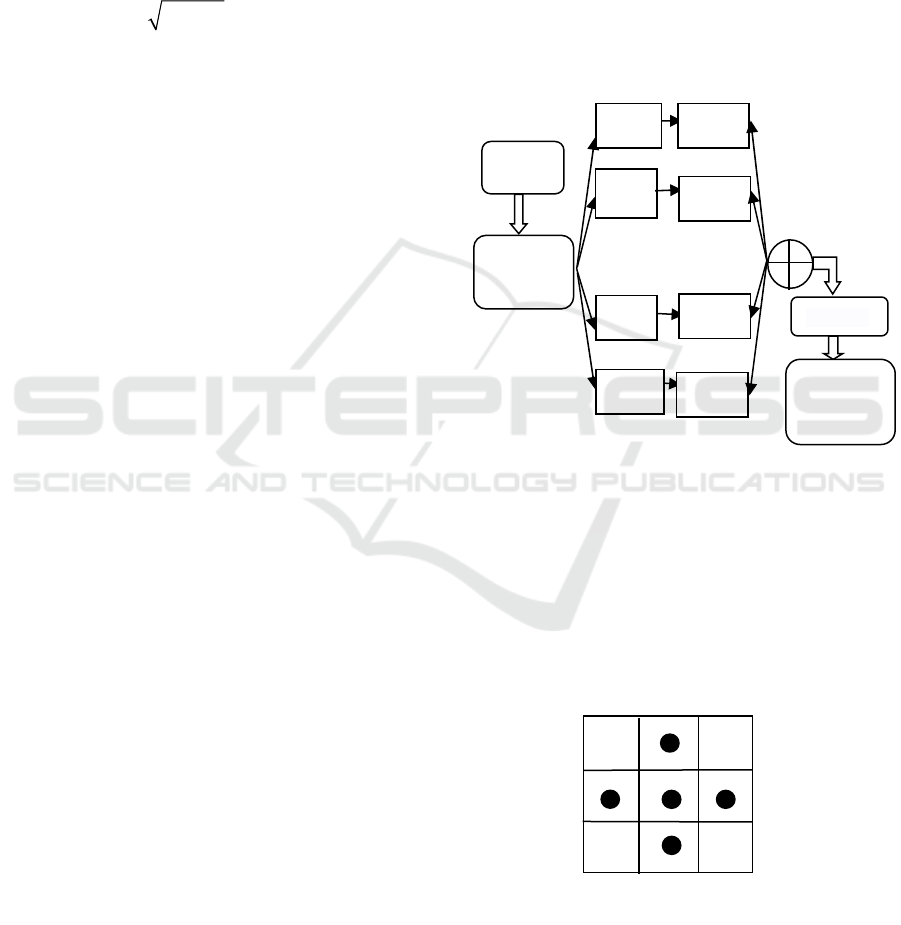
This paper proposed an improved Harris corner
detection algorithm by steerable filter which can
change the selection algorithm for threshold
artificially to a great degree and improve the
accuracy of the corner detection algorithm. The
algorithm structure was as shown in Figure 2.
By image collecting of CCD camera, the binary
image of experiment was achieved by preprocessing
steps such as enhancement and smoothing. Each
pixel of binary image was regarded as pixels of
discrete grey value. And for each pixel, its four
neighbourhoods which constituted the cross point
group were calculated, as shown in Figure 3.
The brightness of the center point was judged by
detecting the four points
Ⅰ, Ⅱ, Ⅲ and Ⅳ around the
cross point group, and then its gradient was judged
according to the brightness value. If the higher
Image
Steerable
Filter
0°
45°
90°
135°
Harris
Harris
Harris
Harris
Summary
Angular
point
detection
Figure 2: The structure of the improved Harris
algorithm
Figure 3: Cross point model
Ⅰ
Ⅱ
Ⅲ
Ⅳ
ISME 2016 - Information Science and Management Engineering IV
308
ISME 2016 - International Conference on Information System and Management Engineering
308

accuracy needs to be achieved, the gradient value of
the center point can be detected by the brightness
values of 8 points surrounding. For case of the real-
time packing line system, the brightness values of
four points surrounding were selected for the
experiment considering factors such as shape and
material.
1) At first, the image was rotated by the steerable
filter of different direction.
From the figure 4 it can be seen that the position
relations between the four points of cross point
group and the center point were four rotation angles
of 0 °, 45 °, 90 ° and 135 °. According to the
brightness of the cross point, the brightness of the
center can be judged, so the four rotation angles of 0
°, 45 °, 90 ° and 135 ° were chosen. The gray image
processed was rotated according to the four angles
respectively.
2) According to the image clarity (focusing
degree), Laplace energy function was evaluated. The
brightness values of cross point model was
calculated respectively and then the gradient value of
the center point was judged.
3) The corners of each direction were detected
using Harris operator. The angular corner
information of image processed by the steerable
filter for four directions was detected using Harris
operator respectively.
4) All the authenticity corners detected were
performed by the logical "or" operation. The real
corners were selected and the false corners were
removed.
4.2 The examples
The experiment was based on Microsoft Visual C++
6.0 programming environment and Open CV. And
the classic image of corner detection operator and
the material on automatic packaging line were
selected. In this paper, all of the processing images
were gray images after the early pretreatment. The
Susan operator, the classical Harris operator and the
Harris operator improved by steerable filter were
performed by corner detection on the basis of
grayscale. The test results were analyzed and
compared as shown in Table 1.
It can be clearly observed that the extraction of
different operator for corner point information had a
large difference, especially for distinguishing
authenticity corner point. The error detection rate
and the miss rate were analyzed and compared as
shown in Table 2 and Table 3.
The false detection rate is
k
N
ω
=
(11)
Where k –the non-corners false detection point
which is regarded as a corner point, N-the number of
real corner points.
Table 1: The results with different algorithms of Sample 1,
2, 3
Sample 1 Sample 2 Sample 3
Original
image
Susan
operator
Harris
operator
The
improved
Harris
operator
Table 2: The comparison of false detection rate
Algorithm
The number of angular point
for false detection
The false
detection
rate/%
Sample
1
Sample
2
Sample
3
Susan 8 6 7 20.34
Harris 4 5 4 7.2
The
improved
Harris
4 2 1 1.3
Table 3: The comparison of undetected rate
Algorithm The number of angular point
for false detection
The false
detection
rate/%
Sample
1
Sample
2
Sample
3
Susan 8 7 2 5.2
Harris 19 4 3 14.4
The
improved
Harris
3 1 1 2.9
The Improved Harris Operator based on Steerable Filter
309
The Improved Harris Operator based on Steerable Filter
309

The average error detection rate is
1
n
i
i
n
ω
ω
=
∑
(12)
Where n -the total numbers of subjects.
It can be seen from table 1 that for the error
detection rate, the evaluation of the Susan operator
was the highest, the traditional Harris operator was
the second place and the improved Harris operator
was the lowest.
The miss rate is
1
N
η
=
(13)
Where L-the numbers of the missed real corner
points, N-the numbers of the real corner points.
The average miss rate is
1
n
i
i
n
η
η
=
∑
(14)
Where n-the total numbers of subjects.
From table 3 it can be seen the miss rate of Susan
operator was the highest, traditional Harris operator
was middle-level, and the improved Harris operator
miss rate was the lowest.
In conclusion it can be seen that the traditional
Harris operator was superior to Susan operator in
detecting the image error detection rate and the miss
rate, and the improved Harris operator was better
than traditional Harris operator.
5 CONCLUSIONS
The paper put forward an improved Harris operator
algorithm based on steerable filter which enhanced
the leak detection and mistakenly identification for
Harris operator during the corner detection. The
gradient of the four different rotation angles for the
suspected corner pixels were further tested by
steerable filter so as to confirm whether it was really
a corner point. The experiment proved that the
method was a good way to improve the detection
accuracy of the real corner point and reduce error
detection rate of the false corner point containing the
noise. But for some high-speed case, the algorithm
program took too much time and need to be further
improved.
ACKNOWLEDGEMENTS
This paper was supported by National "863"
Program (2011AA06A101), Shaanxi Science and
Technology Department for Industrial Research
Program (2015GY120) and Doctor Startup Fund
(BJ13-18).
REFERENCES
Chen, L.,Lyu, W, G.,Ding, S, H., 2005. A survey of
corner detection algorithms. Techniques of Automation
and Applications, 5, 1-4.
Lee, J, S.
,Sun, Y, N.,Chen, C, H., 1995. Multiscale
corner detection by using wavelet transform. In IEEE
Transactions on Image Processing
:
a Publication of
the IEEE Signal Processing Society
,
41, 100-104.
Beus, H, L.
,Steven, S., Tiu, H., 1987. An improved
corner detection algorithm based on chain-coded plane
curves. Pattern Recognition
,
20, 291-296.
Barbara, Z.
, Jaroslav, K., Gabriele, P., 1999. Robust
detection of significant points in multiframe images 1
electronic annexes available. Pattern Recognition
Letters
,
202, 199-206.
Harris, C.
,Stephens, M., 1988. A combined corner and
edge detector. In Proceedings of the 4th Alvey Vision
Conference
,147-151.
Yang, S, Q.
,Ning, J, F.,He, D, J., 2011. Identification
of tip cap of agricultural kernel based on harris
algorithm. Transactions of the Chinese Society for
Agricultural Machinery, 3, 166-169.
Wang, M, F., Yang, S, H., Wu, Q, Z ., 2011. A geometric
quality assessment algorithm of remote sensing image
based on corner detection. Acta Geodaetica et Carto-
graphica Sinica, 2, 175-179.
Liu, B, C.
,Zhao, J. ,Sun, Q., 2013. Improved harris
corner detection method based on Edge. Chinese
Journal of Liquid Crystals and Displays
,
6, 939-942.
Fang, C.
,Wang, X, P.,Niu, Y, P.,et al., 2011. Corner
detection based on an improved Harris algorithm.
Computer and Digital Engineering, 5, 142-144.
Wang, W., Tang, Y, P., Ren, J, L.
, et al., 2008. An
improved algorithm for harris corner detection. Optics
and Precision Engineering
,
10, 1995-2001.
Zhang, X, H., Li, B., Yang, D., 2007. A novel harris multi-
scale corner detection algorithm. Journal of
Electronics & Information Technology
,
7, 1735-1738.
Beis, J., Lowe, D., 1997. Shape indexing using
approximate nearest neighbour search in high-
dimensional spaces. In Proceedings of IEEE
International Conference on Computer Vision and
Pattern Recognition, 1000-1006.
Stephen, M.
,Smith, J, M., 1997. A new approach to low
level image processing. International Journal of
Computer Vision, 23, 45-78.
William, T, F.
,Edward, H, A., 1991. The design and use
of steerable filters. In IEEE Trans Pattern Anal Mach
Intell, 13, 891-906.
Xie, D, H.
,Zhan, Z, Q.,Jiang, W, S., 2003. Improving
harris corner detector. Journal of Geomatics, 2, 22-23.
ISME 2016 - Information Science and Management Engineering IV
310
ISME 2016 - International Conference on Information System and Management Engineering
310

Du, F, M., Wen, Y, M., Chen, F., 2009. On constructing
and applying clarity-evaluation-model of the cross-line
gray-scale image. Computing Technology and
Automation, 3, 83-85.
The Improved Harris Operator based on Steerable Filter
311
The Improved Harris Operator based on Steerable Filter
311
