
Coordination, Synchronization and Localization Investigations in a
Parallel Intelligent Robot Cellular Automata Model that Performs
Foraging Task
Danielli A. Lima
1,2
, Claudiney R. Tinoco
1
, Juan M. N. Viedman
1
and Gina M. B. Oliveira
1
1
Universidade Federal de Uberlandia UFU, Faculdade de Computacao, Avenida Joao Naves de Avila 2121,
Campus Santa Monica, Uberlandia, Minas Gerais, Brasil
2
Instituto Federal do Triangulo Mineiro IFTM, Departamento de Informatica, Avenida Liria Terezinha
Lassi Capuano 255, Chacara das Rosas, Patrocinio, Minas Gerais, Brasil
Keywords:
Cellular Automata, Multi-agents Control, Intelligent Swarms, Parallel Synchronization, Foraging Task,
Multi-objective Search.
Abstract:
Multiple agent systems can be applied to foraging tasks, thus solving this problem in a cooperative intelligent
approach using cellular automata modeling. The objective is to construct an algorithm that performs foraging
task correctly in Webots EDU simulation platform using robot architecture and also improves the individual
controller model of each intelligent agent, using e-Puck devices properly. The proposed communication model
has taken into account some cellular automata specifications, such as, the need for parallel synchronization,
localization and accuracy of information dependency. After several simulations in Webots EDU, evaluating
different approaches, the proposed communication model presented promising results on the parallel multi-
robot foraging performance being pertinent in intelligent swarm robotics context.
1 INTRODUCTION
Many collective biological systems have a higher
performance over a single agent, specially as many
agents can perform different kinds of tasks in par-
allel. This expectation associated with the poten-
tial advantages of using multi-agents over a single
agent have attracted the attention of many researchers.
However, the enormous potential associated with the
multi-agents system is achieved only if the respec-
tive coordination strategies are efficient. There are
many suitable application approaches using multi-
agent systems, such as search and rescue operations
in a disaster (Kantor et al., 2006), garbage collection
(Vargas et al., 2012), and exploration and surveillance
(Calvo et al., 2014). The design process of coordina-
tion strategies algorithms for multiple agent systems
is a challenging problem in robotics, games, or any
other area that uses multiple agents. In this work, each
agent is a robot performing the foraging task.
Foraging task is one of the most studied tasks
for mobile robots, which is very relevant to collec-
tive intelligent robotics (Lima and Oliveira, 2016a).
This task can be studied as robot-robot cooperation
field in multi-robot systems and this task is a repre-
sentation of other studied problems, such as cleaning
(Fortunati, 2016), search and rescue (Couceiro et al.,
2011), or surveillance (Lima et al., 2016). Two major
processes executed by a forager robot are searching
and homing, being that in the first process the robot
needs to find an object placed in unknown location
and in the second it has already collected the object
and needs to deposit it into nests.
Ants use different interactions depending on
the task being tackled and they can interact using
pheromone or direct communication, which produce
a network that represents the colony behavior, called
stigmergy (Beckers et al., 1994). An outgoing for-
ager ant does not go out unless it gets enough inter-
actions with returning foragers, because ants have a
mechanism that can indirectly count other ants near
the nests, as a density calculus (Gordon, 2014). There
are different types of pheromone, if a pheromone
trail is found and this pheromone type indicates
food, then more ants follow this trail, depositing
more pheromone and reinforcing the stimuli (Calvo
et al., 2014). An opposite behavior happens if the
pheromone is of the aversive type, indicating risk and
danger, in this case, they can use the pheromone to
spread out (Gordon, 2014).
Lima D., Tinoco C., Viedman J. and Oliveira G.
Coordination, Synchronization and Localization Investigations in a Parallel Intelligent Robot Cellular Automata Model that Performs Foraging Task.
DOI: 10.5220/0006081403550363
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 355-363
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
355

Cellular Automata (CA) are totally discrete mod-
els and have been recently considered for robotics
field (Lima et al., 2016), (Lima and Oliveira, 2016b),
(Ferreira et al., 2014), (Behring et al., 2001), (San-
toso et al., 2016). CA consist of a large number of
simple components with local connectivity. Despite
of the simplicity of their basic components, CA are
able to solve very complex problems in parallel such
as scheduling (Byun and Yu, 2014) and cryptography
(Silva et al., 2016). Because of CA features, the pro-
posed coordination model has to take in account that
the robot has to be centralized in such cell and also ex-
ecutes its movement synchronized with other robots,
avoiding collisions.
This work presents a coordination model for We-
bots simulator using intelligent swarm robots, includ-
ing localization and communication investigations.
The proposed model investigated herein is devoted to
Cellular Automata Ant Memory (CAAM) proposed
in (Lima and Oliveira, 2016a). These requirements
consider factors such as cellular automata specifi-
cations, parallel synchronization, localization, accu-
racy of information dependency, and e-Puck architec-
ture in Webots simulator. The intelligent coordina-
tion model for multi-agents is divided into four parts:
(i) individual robot control proposed in (Lima and
Oliveira, 2016a), (ii) global robot control proposed
in (Lima and Oliveira, 2016a),(iii) smart grid con-
trol described firstly herein and, (iv) synchronization
and localization control presented and detailed firstly
herein. The Webots control model was used in the
results of (Lima et al., 2016), (Lima and Oliveira,
2016b), (Lima and Oliveira, 2016c) and it is de-
scribed, refined and investigated firstly herein.
The major features of the model are: (i) cellu-
lar automata approach in the foraging task for multi-
robots, (ii) digital images processing for an object
detection, (iii) synchronization modeling for robot
parallel approach and coordination of the intelligent
swarm robotics, (iv) implementation of different lo-
calization approaches, (v) previous successful models
for cooperative robot swarms, including virtual obsta-
cles addition (Marchese, 2011). Besides that, the ap-
proach presented in this work can be used as a library
in other educational simulations in Webots for solv-
ing many multi-robots tasks, such as, surveillance or
search and rescue. More specifically, it can be used
when the simulation requires parallel and synchro-
nized techniques to solve swarm robots tasks based
on cell centralization using CA modeling strategy.
2 PROPOSED MODEL
Initially, the foraging task proposed in (Lima and
Oliveira, 2016a) was selected to be implemented as
a motivation of the investigations in educational sim-
ulations using Webots EDU and improved in (Lima
and Oliveira, 2016c) and (Lima and Oliveira, 2016b).
Any other task, like (Lima et al., 2016), that uses the
requirements - cellular automata used in swarm robots
context, which the movements have to be synchro-
nized and each robot has to be centralized into its cur-
rent cell - could be used in the investigations proposed
herein. The model is divided into four parts: individ-
ual robot control (Lima and Oliveira, 2016a), global
robot control (Lima and Oliveira, 2016c), (Lima and
Oliveira, 2016b), smart grid control and synchroniza-
tion and localization control proposed and investi-
gated herein. The individual robot coordination is
also refined herein and improved using the robot cam-
era and image processing to identify food, different
from (Lima and Oliveira, 2016a), (Lima and Oliveira,
2016c), (Lima and Oliveira, 2016b), that have not
used this device. The robot camera usage turns the
model more realistic, but with a slower execution, be-
cause of the intelligent recognition stage.
2.1 Smart Grid
The bi-dimensional representation of the environment
structure is divided in squared regular cells of size l
and in three layers. The first layer represents the en-
vironment, which each obstacle and the pheromone
are detailed. The second layer represents the robots
grid. The smart layer proposed herein is represented
by a regular grid with colored ball 90
o
upright sen-
sors, which represents the food grid. When a robot
passes on one sensor, then the sensor is turned off.
The smart grid is controlled by a file system through
server readings and writings. The last layer represents
the distance between each lattice cell and a nest. The
environment grid has to be constructed considering
that exists a passage from each cell. The obstacles
cells are represented in gray. In the Figure 1 (a) ex-
ample, the cells that are represented in white are free
and have a pheromone value. One robot, in the robot
smart grid, cannot overlaps another robot cell or a
wall cell, that means it is impossible two robots oc-
cupy the same cell. Each robot has to be centralized
in its current cell to avoid collisions with other robots
or obstacles/walls.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
356

Figure 1: Simulation smart environment world with ob-
stacles and one nest A, the robot swarm is represented by
and food units are represented by , the food sensor is
represented by ↑, and each food unit has a perpendicular
sensor.
2.2 Individual Behavior
The behavior model of each robot is controlled by an
individual finite state machine (FSM) that switches
over a 4-state cycle: Searching → Grabbing → Hom-
ing → Depositing → Searching; as shown in red in
Figure 2, refined from (Lima and Oliveira, 2016a),
(Lima and Oliveira, 2016c), (Lima and Oliveira,
2016b) and improved herein adding more states into
the FSM. New states represent the image process-
ing steps for object identification, such states brought
more realism and intelligence to the individual be-
havior. The environment is modeled as a cellular au-
tomata lattice formed by identical square cells. Each
state will be detailed for a better system understand-
ing. In this work, the moment that a certain amount of
time (T ) is passed, the task ends and all robots stop.
The Searching State represents the CAAM
searching model improvement and it is guided by the
repulsive pheromone (Calvo et al., 2011), (Lima et al.,
2016) - distributed by the robots over the environment
while they walking over it - and in a short-term indi-
vidual memory based on the Tabu search algorithm
(Glover, 1989), (Glover, 1990) and it is divided in
6 other states that are described below. The depo-
sition process state indicates the process where some
amount of pheromone δ is deposited in a central cell
and the amount of δ
0
is deposited in the correspond-
ing neighborhood. The identifying process state, im-
proved in this work, represents the robot camera us-
age. Each robot has a camera and a radius vision de-
noted by r
v
. To process the information captured by
the camera in the robot radius vision r
v
, the robot has
to turn in 360 and verify for each cell in the m-size
neighborhood if exists a food in its vision radius r
v
.
This process comprises the environment image pro-
cessing. The food is represented by an RGB blue [0
0 1] circle sensor ball. To simplification, any other
object in the environment has the food’s color and the
camera has the rotation appointed to the ground floor.
To reduce the image processing time, the camera size
is configured as 1 × 14, which 14 represents the envi-
ronment cell size l. If a blue pixel is detected, then the
robot makes a movement and goes to the Grabbing
State, which consists in the single step that repre-
sents the picking up the detected object. On the other
hand, the robot continues in the Searching State and
goes to the pheromone detection to make a neigh-
borhood movement. The pheromone detection state
represents the environment pheromone reading pro-
cess. The pheromone is deposited in each grid cell x
i j
at each time (t). This reading comprises the Moore
neighborhood values m in the robot’s vision radius r
v
.
The neighborhood size is defined as m = (2r
v
+ 1)
2
.
The robot keeps all the neighborhood cells x
i j
val-
ues, which have m size, in the robot’s vision radius
to make a movement decision. The robot verifies in
its memory which is the lowest valued cell x
i j
that is
possible to movement. Then the robot makes the po-
sition decision based on pheromone and its memory.
This decision is a first choice and it is based on the
inverted pheromone deposited in the neighborhood,
which avoids a robot return to a recently traveled path.
The movement state is the final step that repre-
sents the robot’ transition to one cell x
i j
to cell in the
m-sized robot neighborhood. This action will be ac-
complished by the robots’ individual control, which
is responsible to decide how to control robot’s com-
ponents to make the desired step. The CA model in-
vestigated here is not standard since a transition robot
movement changes the state of two cells. The cell
occupied by the robot becomes a free cell, and a the
neighborhood free cell chosen by the robot, becomes
a cell occupied by the robot. Each robot movement
corresponds to change its current position to an adja-
cent cell and it is decided by a local rule which takes
in account the robot neighborhood. This update rule
changes the robot’s pheromone cell and its neighbor-
hood. Besides that, when a robot passes on a sen-
sor food cell, it changes its current state Searching →
Grabbing and the cell’s state occupied in food floor
state becomes a free cell.
The Homing State is devoted to the CAAM
model, which was inspired by previous CA-based
models of crowd dynamics during building evacua-
tion (Varas et al., 2007) and (Alizadeh, 2011). Each
robot chooses an optimal route to follow in homing,
by considering a static and dynamic floor field, that
are merged using according to (Lima and Oliveira,
2016a). This merging floors prevents the formation
of rows close to the nests (Alizadeh, 2011), jamming
(Yamamoto et al., 2007), inertial behavior prevention
(Yang et al., 2005), as analyzed in (Lima and Oliveira,
Coordination, Synchronization and Localization Investigations in a Parallel Intelligent Robot Cellular Automata Model that Performs
Foraging Task
357

Figure 2: Individual behavior represented in a finite state machine that represents the cycle of each robot.
2016a). The homing process was inspired by pedes-
trian evacuation models previously investigated in the
literature (Varas et al., 2007), (Alizadeh, 2011), and
was proposed firstly in (Lima and Oliveira, 2016a).
The Depositing State represents the single step when
robot leaves the food into the nest.
2.3 Global Behavior
The global behavior comprehends two processes: the
evaporation process and the conflict avoidance pro-
cess (to regulate interactions among robots and their
neighboring obstacles and robots). The pheromone
evaporation process is a robot state inherent, it
means that at each time step t there is a global evapo-
ration process according to a constant β. Each cell
that is visited by a robot is receives an amount of
pheromone (6= 0), and each cell that is valued differ-
ent from zero is decreased.
Each robot tries to move to a neighborhood cell
depending on its movement radius r
p
. The model us-
ing the short term memory based on Tabu search and
the inverted pheromone permit an almost free con-
flicts trajectory, but specific cases are solved by con-
flicts avoidance process. Specific conflict case can be
solved the algorithm based on (Varas et al., 2007) and
adapted in (Lima and Oliveira, 2016a) as following: if
two robots try to move into the same cell, featuring a
conflict; a random value decides which robot will per-
form the movement, while the loser cannot move. If
one robot have two cells with the same lowest value to
chose, the robot selects one randomly. At each t some
time step a random decision is made to avoid robots in
different layers conflicts. As presented in (Lima and
Oliveira, 2016c), when two robots are in a perpendic-
ular crossing conflict, to solve this problem the move-
ment is made in two steps using a non-deterministic
method follows these steps: (a) the first step one robot
is randomly chosen and makes its movement, then the
other robot realize its movement. (b) To solve a robot-
obstacle conflict problem, virtual obstacles (March-
ese, 2011) are inserted in the floor field.
These interactions between robots and environ-
ment (pheromone field), and by the robots and robots
(collision avoidance), emerges a complex behavior
that solves the foraging task by the robots swarm.
These interactions produce a robot-robot aversion in-
teraction, prevents collisions, and increases the explo-
ration and covered area.
2.4 Webots Controller and Localization
Approaches
Aiming to describe parallel synchronization and lo-
calization approach described firstly herein, all robots
have to accomplish their movements at the same time.
Another characteristic of the model is that all robots
have to be centralized in its current cell to avoid col-
lisions with robots or walls during their movements.
To synchronize the parallel robot team movement,
a global information was shared between the robots
through a server, as showed in finite state machine of
Figure 3. The messages were sent using text files,
which contains the robot matrix position and time
t. Initially, each robot sends its t time to the server,
which is responsible to read and process the next team
movement in the t +1 time. This server solves all con-
flicts and sends back the message to the robots indi-
cating their next movement position. All robots reads
in parallel and independently the server file and search
for their robot number and execute their movement.
During each robot movement the server starts reading
continually the files from each robot verifying if the
robot ends its movement, which is indicated when the
robot write t + 1 in its file. If in all files are written
t + 1 time information, the server calculates the new
position.
Two approaches were considered in the robot lo-
calization. The first one considers the odometry func-
tion usage (Oliveira et al., 2015). It is known that
the odometry propagates an error during the trajec-
tory path during the execution when it used without
any other correction mechanism (Martinelli, 2002).
The second uses a Global Positioning System (GPS)
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
358

Figure 3: Webots proposed controller represented in a finite
state machine to control the team of robots.
improvement for the localization precision, specially
when it was aggregated with the Webots EDU Iner-
tial Unit library to yaw refinement. Besides that, it
is known that all robots execute their movements and
stop in a predefined angle depending on the historical
of current and last cells, so a saved and an unsaved
robot turn angle were considered.
The first approach using GPS proposed herein
considers that the robots execute their movements at
each time step. At each time step is calculated the
milliliter difference error e
x
, e
y
between the position
that the robot should be and the robot current posi-
tion, for each robot coordinate (x, y) respectively. The
error is increased at each time step. When the sum of
errors is bigger than a constant |ε
xy
|, the robot adjust
its coordinate (x, y or both) according to the desired
position at that current step. If the robot has moved
more than the desired position, in the next step the
robot returns the extra distance. On the other hand, if
the robot has moved less than the desired position, in
the next step the robot progress the amount of missing
millimeters. But to control the errors in both coordi-
nates at the same time causes delays in the simula-
tion. To solve this problem, a solution is proposed
herein correcting the error just in the coordinate that
the robot realizes the next movement. For example, if
the robot has an error to correct in coordinate x, but
it is going to move in the next step forward the co-
ordination y, the robot will not correct its error. The
robot only corrects its own position in its movement
coordinate. On the other hand, if the robot is moving
diagonally, both coordinates are corrected.
Another orientation error that each robot has to
calculate is the robot yaw error e
π
. A yaw rotation
is a movement around the yaw axis that the robot per-
forms at each time step during its movements to the
neighborhood cells. At each time step the coordina-
tion system has the correct angle that the robot should
be and the current robot angle. Similarly to the coor-
dination error, the robot calculates the sum of rotation
errors during its path in radians, and when the error is
bigger than a constant |ε
π
|, the robot yaw is corrected.
3 EXPERIMENTS
The experiments are presented in this section were
conduct to show that investigations proposed herein
are capable of being implemented in a real simulator
Webots EDU using the e-Puck robot architecture for
swarm robots in foraging task with the synchroniza-
tion mechanism. The experiments were performed
using a simulator environment/grid of 20 × 30 cells
with two nests (showed in brown in Figure 4), each
cell has l = 14 cm size. To perform the task 6 robots
(N = 6 in green) and 6 units of food (F = 6 in blue)
were used to show the parallel behavior of the robots.
The first instance of all experiments were conducted
using the configuration shown in Figure 4 (a). The
first experiment used the odometry function (Ferreira
et al., 2014) and at each time step t the robots have to
return to their initial angle (turn to 0
o
angle). Besides
that, the robot can rotate between one of the possible
angles {−135
o
, −90
o
, −45
o
, 0
o
, 45
o
, 90
o
, 135
o
}. The
results in Figure 4 (b) shows that although the robots
are executing the task using a parallel synchroniza-
tion, it is possible to observe that they are not cen-
tralized in their respective cells (provoking collisions
after t steps). This strategy of returning to the initial
angle provokes a delay in the simulation time. The
rotations accumulate errors in odometry function dur-
ing the robots navigation. To solve this problem an
approach that saves the current angle position in the
robot struct parameters was considered. After that,
two improvements were done: a faster processing
time and a lower error of position due to rotations.
Results obtained with this strategy are shown in Fig-
ure 4 (c).
Although the experiments using odometry and
saving the robot current position improved the per-
formance of the swarm, this approach also propagates
errors during the robot navigation process, avoiding a
robot centralization into its respective cell. Figure 5
(a) shows a partial solution for this problem using a
GPS slot in Webots EDU simulator. Each time step
the coordinate (x, y) was corrected by the robot when
it founds an error bigger than threshold |e
xy
= 0.01|
for each x and y-axes. A robot also calculates previ-
ously its coordinate and correct its movement before
performing a movement action, increasing or decreas-
ing the movement step size. In this last case, the robot
moves more or less than the size of the cell to achieve
the correct coordinate at every |e
xy
≥ 0.01|. However,
using only the coordinate error |e
xy
= 0.01| the sys-
tem was not capable of accomplishing a good perfor-
mance due to the yaw error. Figure 5 (b) shows an
experiment that solves this problem the |e
π
| was used
to correct the turn angle of the robot every time its
Coordination, Synchronization and Localization Investigations in a Parallel Intelligent Robot Cellular Automata Model that Performs
Foraging Task
359

found an error, using our proposed controller model.
Finally, Figure 5 (c) shows the last experiment that
uses the robot camera sensor, another improvement
also investigated and proposed herein. Aiming the use
of this camera device correctly, at each time step the
robot has to turn in all 360 angles aiming to find an
object into its radius vision r
v
. The camera device is
capable of capture images that are after treated by im-
age processing recognizing blue objects into robot’s
radius vision r
v
. In this case, robot also uses GPS and
Inertial unit slot to correct the robot team accuracy
into the lattice cells.
To compare the simulation time spent in Webots
Figure 4: Simulations in Webots EDU: (a) Initial configura-
tion. (b) Odometry without angle maintenance. (c) Odom-
etry with angle maintenance.
Figure 5: Simulations in Webots EDU: (a) GPS approach
without yaw correction. (b) GPS approach with yaw correc-
tion. (c) GPS approach without yaw correction and camera
device usage.
EDU platform a graphic shown in Figure 6 was plot-
ted to contrast the differences between each approach
implementation. The x-axis represents each time step
t of the task that are in the 0 ≥ t ≥ 7 and the x-axis rep-
resents the simulator time elapsed to conclude each
time step t. The first implementation approach shown
in Figure 6 (a) represents one of the biggest Webots
simulator elapsed time to capture the first object.
That fact can be explained due to the massive
amount of rotations each robot concludes turning
back to the initial angle. Figure 6 (b) refers to the sec-
ond implementation, that absents the rotation to initial
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
360
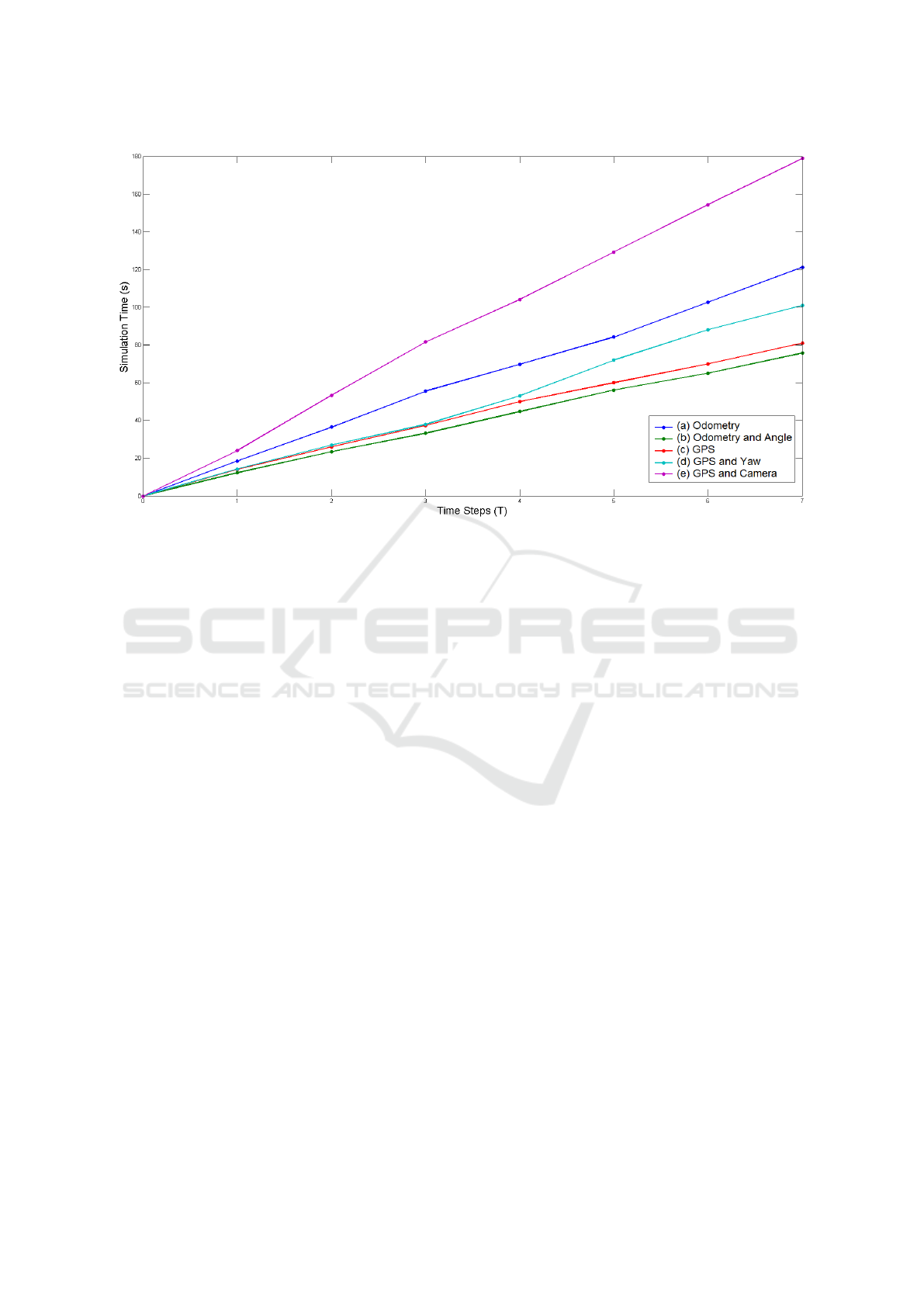
Figure 6: Different evaluations using: (a) Odometry approach without current angle maintenance. (b) Odometry approach
with current angle maintenance. (c) GPS approach without correction of the yaw. (d) GPS approach correcting of the yaw.
(e) GPS approach and correction of the yaw using the robot camera.
angle, and its resulted in the best simulation time, due
to the simplicity of the odometry calculus at each time
step. Figure 6 (c) shows the simulation results us-
ing the GPS localization and the processing simulator
time is closely to the odometry approach, that keeps
the current rotation angle. Figure 6 (d) shows the yaw
resolution, because of the correction being done at
each time step, this procedure increased the simula-
tion time. Finally, Figure 6 (e) uses the camera de-
vice returning the worst simulation performance, due
to the image processing that consumes high process-
ing capability and also because of the rotations. Al-
though some combinations are not resulting in good
simulations time, the accuracy in cell centralization is
most important aspect to be considered, so the pro-
posed coordination model uses the GPS yaw and co-
ordinates refinement merged with the camera usage,
that is inherent to the foraging task.
4 CONCLUSIONS
Simulations were carried out in foraging task us-
ing the cellular automata model proposed in (Lima
and Oliveira, 2016a). The investigations proposed
herein used different implementation Webots EDU
approaches for a good adjustment of parameters and
a better comprehension of the model in terms of lo-
calization, devices usage and synchronization. The
best combination of mechanism and strategies pro-
posed herein comprehends: (a) the camera usage and
image processing, (b) the synchronization using text
files readings and writings, and (c) the localization al-
gorithm that both corrects the distance and yaw. The
scenario investigated of our model was foraging task,
which is very relevant to collective robotics (Falleiros
et al., 2015) due to it is a instance metaphor of a
broad class of problems, such as, search and rescue
and surveillance (Lima et al., 2016).
The requirements of the environment configura-
tion for the application of our model are: (i) the en-
vironment is modeled as a cellular automata lattice
formed by identical square cells; (ii) each robot is
controlled by an individual finite state machine; (iii)
the robot-robot conflicts avoidance are treated in a
non-deterministic way and also a crossing perpendic-
ular motion was detected; (iv) robots obstacles are
treated using virtual obstacles (Marchese, 2011); (v)
even the odometry localization presenting the best
processing time each time step, the GPS localization
model resulted in better accuracy of robot cell central-
ization. Using simulations on Webots EDU platform
it was possible to evaluate the proposed model in a
parallel architecture using e-Puck robots.
A forthcoming work is about the implementation
of other swarm robots tasks, such as, search and res-
cue and collective garbage collection, using the pro-
posed synchronization model in Webots EDU simu-
Coordination, Synchronization and Localization Investigations in a Parallel Intelligent Robot Cellular Automata Model that Performs
Foraging Task
361

lator. Besides that, the camera device can be used
not only for object identifying process but also in the
pheromone detection that can be used in the smart
grid adding a pen slot in the e-Puck. Additionally,
other device can also be used such as sensor IR de-
vices and camera image noise can be treated and in-
vestigated in a future work.
REFERENCES
Alizadeh, R. (2011). A dynamic cellular automaton model
for evacuation process with obstacles. Safety Science,
49(2):315–323.
Beckers, R., Holland, O., and Deneubourg, J.-L. (1994).
From local actions to global tasks: Stigmergy and col-
lective robotics. In Artificial life IV, volume 181, page
189.
Behring, C., Bracho, M., Castro, M., and Moreno, J. (2001).
An algorithm for robot path planning with cellular au-
tomata. In Theory and practical issues on cellular au-
tomata, pages 11–19. Springer.
Byun, H. and Yu, J. (2014). Cellular-automaton-based
node scheduling control for wireless sensor net-
works. Vehicular Technology, IEEE Transactions on,
63(8):3892–3899.
Calvo, R., de Oliveira, J. R., Figueiredo, M., and Romero,
R. A. (2014). Parametric investigation of a distributed
strategy for multiple agents systems applied to coop-
erative tasks. In Proceedings of the 29th Annual ACM
Symposium on Applied Computing, pages 207–212.
ACM.
Calvo, R., de Oliveira, J. R., Figueiredo, M., and Romero,
R. A. F. (2011). Bio-inspired coordination of multiple
robots systems and stigmergy mechanims to coopera-
tive exploration and surveillance tasks. In Cybernetics
and Intelligent Systems (CIS), pages 223–228. IEEE.
Couceiro, M. S., Rocha, R. P., and Ferreira, N. M. (2011). A
novel multi-robot exploration approach based on par-
ticle swarm optimization algorithms. In Safety, Secu-
rity, and Rescue Robotics (SSRR), 2011 IEEE Interna-
tional Symposium on, pages 327–332. IEEE.
Falleiros, E. L. S., Calvo, R., and Ishii, R. P. (2015).
Pheroslam: A collaborative and bioinspired multi-
agent system based on monocular vision. In Com-
putational Science and Its Applications–ICCSA 2015,
pages 71–85. Springer.
Ferreira, G. B., Vargas, P. A., and Oliveira, G. M. (2014).
An improved cellular automata-based model for robot
path-planning. In Advances in Autonomous Robotics
Systems, pages 25–36. Springer.
Fortunati, L. (2016). Moving robots from industrial sec-
tors to domestic spheres: A foreword. In To-
ward Robotic Socially Believable Behaving Systems-
Volume II, pages 1–3. Springer.
Glover, F. (1989). Tabu search part i. ORSA Journal on
computing, 1(3):190–206.
Glover, F. (1990). Tabu search part ii. ORSA Journal on
computing, 2(1):4–32.
Gordon, D. M. (2014). The ecology of collective behavior.
PLoS Biol, 12(3):e1001805.
Kantor, G., Singh, S., Peterson, R., Rus, D., Das, A., Ku-
mar, V., Pereira, G., and Spletzer, J. (2006). Dis-
tributed search and rescue with robot and sensor
teams. In Field and Service Robotics, pages 529–538.
Springer.
Lima, D. A. and Oliveira, G. M. B. (2016a). A cellular
automata ant memory model of foraging in a swarm
of robots (submitted to). Applied Mathematical Mod-
elling.
Lima, D. A. and Oliveira, G. M. B. (2016b). New bio-
inspired coordination strategies for multi-agent sys-
tems applied to foraging tasks. IEEE International
Conference on Tools with Artificial Intelligence (IC-
TAI), IEEE Artificial Intelligence Society, San Jose,
CA, United States, 6-8th November 2016.
Lima, D. A. and Oliveira, G. M. B. (2016c). A probabilis-
tic cellular automata ant memory model for a swarm
of foraging robots. 14th International Conference on
Control, Automation, Robotics and Vision (ICARCV
2016), IEEE Control Society, Phuket, Thailand, 13-
15th November 2016.
Lima, D. A., Tinoco, C. R., and Oliveira, G. M. B. (2016). A
Cellular Automata Model with Repulsive Pheromone
for Swarm Robotics in Surveillance, pages 312–322.
Cellular Automata: 12th International Conference on
Cellular Automata for Research and Industry, ACRI
2016, Fez, Morocco, September 5-8, 2016. Proceed-
ings, Springer International Publishing, Cham.
Marchese, F. (2011). Mrs motion planning: the spatiotem-
poral multilayered cellular automata approach. Intro-
duction to Modern Robotics. iConcept Press.
Martinelli, A. (2002). The odometry error of a mobile robot
with a synchronous drive system. Robotics and Au-
tomation, IEEE Transactions on, 18(3):399–405.
Oliveira, G. M., Vargas, P. A., and Ferreira, G. B. (2015). A
local decision making cellular automata-based path-
planning. The European Conference on Artificial Life
(ECAL 2015), Procedings, York, United Kingdom,
Monday, 20-24th July, 2015, Artifical Life Society.
Santoso, J., Riyanto, B., and Adiprawita, W. (2016). Dy-
namic path planning for mobile robots with cellular
learning automata. Journal of ICT Research and Ap-
plications, 10(1):1–14.
Silva, E. C., Soares, J. A. J. P., and Lima, D. A. (2016).
One-dimensional chaotic cellular automata with fixed
border applied to a cryptosystem modeling for digital
images. Revista de Informatica Teorica e Aplicada,
23:250–276.
Varas, A., Cornejo, M., Mainemer, D., Toledo, B., Rogan,
J., Munoz, V., and Valdivia, J. (2007). Cellular au-
tomaton model for evacuation process with obstacles.
Physica A: Statistical Mechanics and its Applications,
382(2):631 – 642.
Vargas, P. A., Benhalen, A. M., Pessin, G., and Os
´
orio, F. S.
(2012). Applying particle swarm optimization to a
garbage and recycling collection problem. In Compu-
tational Intelligence (UKCI), 2012 12th UK Workshop
on, pages 1–8. IEEE.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
362

Yamamoto, K., Kokubo, S., and Nishinari, K. (2007). Sim-
ulation for pedestrian dynamics by real-coded cellular
automata (rca). Physica A: Statistical Mechanics and
its Applications, 379(2):654–660.
Yang, Z., Zhao, L., Li, J., and Fang, Y. (2005). Simulation
of the kin behavior in building occupant evacuation
based on cellular automaton. Building and Environ-
ment, pages 411 – 415.
Coordination, Synchronization and Localization Investigations in a Parallel Intelligent Robot Cellular Automata Model that Performs
Foraging Task
363
