
Trade-off Between GPGPU based Implementations of Multi Object
Tracking Particle Filter
Petr Jecmen
1
, Frederic Lerasle
2
and Alhayat Ali Mekonnen
2
1
FM, Technical University of Liberec, Studentska 1402/2, 461 17 Liberec I, Czech Republic
2
LAAS-CNRS, Universit
´
e de Toulouse, CNRS, UPS, Toulouse, France
Keywords:
Particle Filter, MOT, GPGPU, Decentralized Tracking, Multi-template Appearance Model.
Abstract:
In this work, we present the design, analysis and implementation of a decentralized particle filter (DPF) for
multiple object tracking (MOT) on a graphics processing unit (GPU). We investigate two variants of the imple-
mentation, their advantages and caveats in terms of scaling with larger particle numbers and performance on
several datasets. First we compare the precision of our GPU implementation with standard CPU version. Next
we compare performance of the GPU variants under different scenarios. The results show the GPU variant
leads to a five fold speedup on average (in best cases the speedup reaches a factor of 18) over the CPU variant
while keeping similar tracking accuracy and precision.
1 INTRODUCTION
Visual tracking of targeted objects has received sig-
nificant attention in the Vision community. In the last
decade a number of robust tracking strategies that can
track targets in complex scenes have been proposed.
One such successful paradigm is the particle filter
(PF) [(Isard and Blake, 1998), (Doucet et al., 2000)].
The most important property of a PF is its ability
to handle complex, multi-modal (non-Gaussian) pos-
terior distributions. Such distributions are approxi-
mated by a cloud of particles. Essentially, the num-
ber of particles required to adequately approximate
the distribution grows exponentially with the dimen-
sionality of the state space. PFs are computationally
expensive as the number of particles needs to be large
for good performances in terms of robustness and pre-
cision. Moreover, the observation models are often
built on complex appearance models, and as a result
the trackers have difficulties to operate in real time es-
pecially when the number of targets increases.
Currently, to the best of our knowledge, the literature
is lacking works that showcase graphical processing
unit (GPU) to improve performance of multi object
tracking (MOT) algorithm. Hence, this paper aims to
fill this void by presenting performance comparison
and assessment of MOT algorithm running on GPU.
The tracking is achieved by a decentralized particle
filter with rich target appearance model. We demon-
strate that the precision of GPU implementation is
comparable to the standard CPU version and the ex-
ecution time is significantly better – on average five
times faster than CPU and on some datasets the im-
provement is by a factor of 18.
This paper is organized as follows: section 2 starts
with background and overview of MOT and the use
particle filters, the limits of CPU computation and
overview of current state of GPU implementations.
Section 3 presents the basics of MOT particle filter
along with discussion on how to map it on GPU then
Section 4 details our GPU implementations. In sec-
tion 5 we present the results along with discussion
and the paper finishes off in section 6 with conclu-
sions and future works.
2 BACKGROUND AND
OVERVIEW
2.1 Framework
People detection and tracking is an important re-
search area with prominent applications in video
surveillance, pedestrian protection systems, human-
computer interaction, robotics, and the like. As a
result, it has amassed huge interest from the scien-
tific community [(Breitenstein et al., 2011), (Doll
´
ar
et al., 2012), (Doll
´
ar et al., 2014)]. People track-
ing falls under Multi-Object Tracking (MOT) which
Jecmen P., Lerasle F. and Ali Mekonnen A.
Trade-off Between GPGPU based Implementations of Multi Object Tracking Particle Filter.
DOI: 10.5220/0006092301230131
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 123-131
ISBN: 978-989-758-227-1
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
123

deals with the process of accurately estimating the
state of objects position, identity, and configuration -
over frame from visual observations. Due to incurred
challenges - heavy scene clutter, target dynamics,
intra/inter-class variation, measurement noise, frame
rate - it has long been established that coupling track-
ers with detectors, in a paradigm called tracking-by-
detection, helps better tackle these challenges [(Bre-
itenstein et al., 2011), (Li et al., 2008), (Khan et al.,
2005)]. In the context of people tracking, tracking-
by-detection approaches rely on a people detector to
start, update, reinitialize, guide (avoid drift), or termi-
nate a tracker.
In the literature, it is common to find many tracking-
by-detection approaches applied to people tracking.
However the usual trend it to select a single detector
and directly couple it with the filter, e.g, [(Breitenstein
et al., 2011), (Li et al., 2008)]. There are two impor-
tant tracker configurations: a decentralized one which
assigns an independent tracker per target [(Breiten-
stein et al., 2011), (Ger
´
onimo Gomez et al., 2012)],
and centralized one, also called a joint state tracker,
in which all the states of the tracked targets are con-
catenated forming a single state vector that captures
the entire system configuration (Khan et al., 2005). In
our work, we have reused the observation model ini-
tied in an approach called Tracker Hierarchy (Zhang
et al., 2012), which is similar to decentralized particle
filter, but instead of simple single target representa-
tion, it adds a rich target representation model in the
form of template ensembles.
One bottleneck is clearly the fps and we have to min-
imize it as much as possible. Another factor that has
significant impact on tracking precision is frame rate
of the video. Lower frame rate means larger time gaps
between frames, which leads to bigger target’s shifts.
While it can be compensated by tuning the motion
model accordingly, the tracking is generally more pre-
cise for videos recorded with larger frame rates. We
focus on videos recorded with conventional cameras,
which use frame rate of 25 frames per second.
2.2 Parallel Implementation of the
Particle Filter
In typical scenarios, the computation for one parti-
cle is fast. However, the particle number typically
ranges from tens to thousand (or more, depending on
implementation), so the computation time necessary
for one frame can get very large. As aforementioned
in the literature, the time required for computation
grows linearly with particle number. Due to the na-
ture of the particle filter algorithm there was always
an effort to create a parallel implementation of the
algorithm to provide real time performance. (Rosn
et al., 2010) studied how the use of multicore com-
puters can help speeding up the computation. Their
results show that the speedup is possible, but heavily
depends on the type of particle filtering scheme used.
(Medeiros et al., 2008) propose a parallel implemen-
tation of color based PF on a SIMD (Single Instruc-
tion Multiple Data) linear processor. Their analysis
showed a possibility of substantial performance gain
compared to current desktop computers.
With the introduction of CUDA (Compute Unified
Device Architecture) the focus shifted to GPGPU.
(Chao et al., 2010) offered a design guide on how to
create an efficient filter running on GPU. They pro-
pose two approaches, FRIM prior editing and local-
ized resampling, in order to reduce global operations
and thus improve performance. The approach pro-
posed by (Hendeby et al., 2010) does not use CUDA
to achieve GPU computation. Instead, they propose
a filter based on OpenGL shading language (Rost,
2006). Their simulations confirmed that GPU can
outperform CPU for larger tasks, while for smaller
tasks the overhead of GPU initialization is substan-
tial and thus the CPU is faster for such tasks. (Ry-
mut and Kwolek, 2010) present a particle filter with
appearance-adaptive models running on GPU using
CUDA. Their results again confirm the GPU speed
gain, but they were able to outperform the CPU even
for small particle numbers (tens or hundreds of par-
ticles). However they did not account for the GPU
overhead, so the real performance of the GPU solu-
tion might be worse. (Chitchian et al., 2013) aim to
provide a study on how to design a distributed parti-
cle filter on GPU. Their focus is not a people detec-
tion scenario, nonetheless their results again confirm
that the GPU implementation is superior to CPU vari-
ants. Large focus has been also on the concrete parts
of the particle filtering scheme, (Li et al., 2015) offer a
detailed overview of resampling strategies along with
discussion on how each variant performs on different
platforms.
From the above insights, it is clear that a lot of de-
tectors have GPU implementation, usually achieving
significant speedup. However all of the aforemen-
tioned papers focus on SOT. As far as we know there
is no paper focusing on implementing MOT on GPU.
While the extension of SOT to MOT can be simple
(as in case of decentralized particle filter), the perfor-
mance gained in SOT case might not carry to MOT
variant because of new challenges in memory han-
dling and more complex logic of tracker creation and
deletion. The theory behind decentralized PF based
MOT is presented in section 3 and the GPU imple-
mentation will be discussed in section 4.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
124

3 MOT PARTICLE FILTER
BASICS
To perform MOT, we have used an approach called
”Decentralized Particle Filter.” In this approach, each
target is assigned a unique instance of a Particle Filter
as a tracker. In this work, this target specific tracker
is implemented based on a tracking by detection
paradigm (Perez et al., 2004) as it is the most widely
used and suitable PF variant for detector integration.
This is a sequential Monte Carlo approach which ap-
proximates the posterior over the target state x
t
given
all measurements up to time t, Z
1:t
, using a set of
N weighted samples, i.e., p(x
t
|Z
1:t
) ≈ {x
(i)
t
,w
(i)
t
}
N
i=1
.
Tracking is achieved sequentially with the notion of
Importance Sampling whereby the particles at time
t − 1 are propagated according to a proposal density,
q(.), and their weights are updated in accordance with
equation 1.
w
(i)
t
∝ w
(i)
t−1
p(z
t
|x
(i)
t
)p(x
(i)
t
|p(x
(i)
t−1
)
q(x
(i)
t
|x
(i)
t−1
,z
t
)
(1)
Where, p(x
(i)
t
|p(x
(i)
t−1
) is the target dynamic model,
p(z
t
|x
(i)
t
) is the likelihood term, and q(x
(i)
t
|x
(i)
t−1
,z
t
) is
the proposal density evaluated at the sampled state.
To derive this filter with incoming detections, hence
to perform tracking-by-detection, the proposal den-
sity shown in equation 2 is employed. According to
this density, part of the particles will be sampled from
the detector cues, π(x
(i)
t
|z
t
), some from the dynamics,
and some from the prior p
0
(x
(i)
t
), in accordance with
the ratios α,β,γ which should sum to 1.
q(x
(i)
t
|x
(i)
t−1
,z
t
) =
βp(x
(i)
t
|x
(i)
t−1
) + απ(x
(i)
t
|z
t
) + γp
0
(x
(i)
t
) (2)
The likelihood p(z
t
|x
(i)
t
) is a probabilistic measure
based on the Tracker Hierarchy approach (Zhang
et al., 2012). This approach consists of a rich appear-
ance model of the target in the form of a template en-
semble and uses hierarchy of expert and novice track-
ers for efficient multi-person tracking. One template
consists of 2 histograms, each computed in different
color channel. The color channels are picked at the
template initialization based on the variance ratio be-
tween the background and foregrounds feature weight
distributions (see (Zhang et al., 2012) for details).
During MOT, each incoming detection has to be as-
sociated with the different trackers distinctly. For that
we use a greedy assignment algorithm (Breitenstein
et al., 2011) which performs comparably to the Hun-
garian assignment algorithm.
The state of the filter is computed by minimum mean
square error (MMSE) for the particle cloud. The re-
sult is a weighed average of the particle state vectors
representing the current state of the filter (position and
size in image plane).
In order to filter out invalid detections and noise the
filter is not created at the moment of new object de-
tection. Instead, the tracker is initialized after sev-
eral subsequent detections with overlapping bounding
boxes which are neither occluded nor associated to an
already existing tracker. If there is no detection for
already initialized tracker for several frames, we ter-
minate it. During the frames with no detection the
tracker is deactivated, so in case of new detection we
can check if it isn’t a detection of previously occluded
target.
The MOT particle filtering introduces new kind of
challenge for GPU implementation compared to sin-
gle object tracking (SOT). Typically GPU is very effi-
cient for large repetitive tasks, where a lot of data can
be reused from frame to frame. In tasks, where inten-
sive thread communication and / or frequent random
data loading / storing is required, the GPU does not
provide any significant performance improvement.
The SOT particle filter is a task fit for GPU, because
the only part where some synchronization and com-
munication is required is the resampling step. The
rest of particle handling can be trivially split to in-
dependent tasks. The introduction of multiple track-
ers in decentralized manner does not spoil the inde-
pendence. However additional cost of computation
handling arises due to more complex memory han-
dling and the need to launch the computation for every
tracker. In section 4 we will present two approaches
that are fundamentally different in the way how the
minimization of GPU computation overhead is han-
dled.
4 GPU IMPLEMENTATION
First part of this section will provide an overview of
programming in CUDA framework. Afterwards we
will provide details on how we have mapped the MOT
particle filter to GPU using CUDA framework.
4.1 Compute Unified Device
Architecture (CUDA)
CUDA is a programming interface that uses the paral-
lel architecture of NVIDIA GPUs for general purpose
computing (Nickolls et al., 2008). The computation
in CUDA is expressed in form of a kernels, which
are programs written in Single Instruction Multiple
Trade-off Between GPGPU based Implementations of Multi Object Tracking Particle Filter
125
Threads (SIMT, which is a generalization of SIMD
programming model) language defined by CUDA.
The execution of the kernel is done by threads, where
all threads execute the same code, but each thread
has unique set of indexes to be able to determine on
which data it should operate. In CUDA there are
two levels of indexes - blocks (groups of threads) and
grids (groups of blocks). The main difference be-
tween block and grids is that threads in one block can
share a memory block, while blocks in mode grid can-
not. While CUDA programming language allows pro-
gramming constructs that create divergence (typically
if-then-else), the physical execution is done in warps
in true SIMD fashion. The device typically launches
16 or 32 threads in parallel in one warp and all threads
execute the same code. This means that code with two
possible ways of execution (one if-then-else block)
the GPU first executes the ”true” branch and then ex-
ecutes the ”false” branch.
The memory model consists of 4 parts: registers (pri-
vate memory for each thread, fastest), shared mem-
ory (all threads in one block can access the same seg-
ment), constant memory and global memory (accessi-
ble by anybody, very slow compared to other memory
types). In order to hide global memory latency, GPU
is able to very effectively switch between warps. So
while one warp is waiting for the data, GPU switches
the context to another warp, which can continue its
execution. An efficient CUDA implementation must,
apart from direct code conversion, also handle effi-
cient data reading / writing due to memory latency,
as little branching as possible and a good ratio of
arithmetic calculations versus memory operations to
achieve good GPU utilization.
While modern GPUs support double precision primi-
tives, the performance of double arithmetic is always
worse compared to single precision (Itu et al., 2011).
In worst case scenario, where the performance of the
algorithm is bound by the arithmetic, the performance
drop might be up to 1/24 of single precision perfor-
mance (the actual value depends on the concrete al-
gorithm and GPU used). Due to this possible perfor-
mance penalty we have used single precision arith-
metic in our GPU implementation and we have tested
the precision of the results to see if the reduced arith-
metic precision has any impact on the results quality.
4.2 Our Single GPU based Tracker
Variant
This variant mirrors the SOT approach, where one
computation handles one tracker. This can be viewed
as a naive and intuitive approach to create a GPU im-
plementation. By launching this computation for ev-
ery tracker in the frame we can perform MOT. Advan-
tages of this approach is easier memory handling and
independence from other trackers, so creation, dele-
tion or other change in other trackers won’t affect cur-
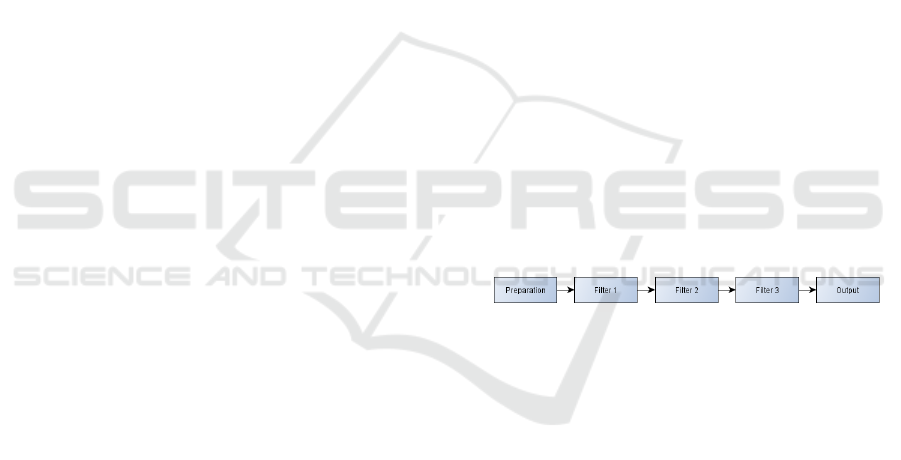
rent tracker. A big disadvantage is sequential tracker
computation (computation order can be seen in Fig-
ure 1).
The creation of GPU implementation of Importance
Sampling introduced in section 3 consists of two
parts. First part is fully parallel computation of parti-
cle weights (meaning evaluation of equation 1, when
we know values of all terms). This is easily achiev-
able because the computation of weight of one parti-
cle is independent from others. Second part consists
of parallel implementation of component computa-
tion. Especially the term p(z
t
|x
(i)
t
) is computationally
expensive and thus an effective parallel implementa-
tion would speedup the computation noticeably.
The mapping to CUDA takes advantage of indexing
hierarchy, where a grid represents a complex task and
the group of threads cooperate on solving given task
(usually by splitting the problem space). For sampling
there is no point to split the computation, so in this
case the grid index is not used and the thread index
identifies the particle.
Some parts of the algorithm have not been ported
to GPU due to satisfactory performance on CPU,
namely the detection and tracker association and filter
state estimation.
Figure 1: Sequential execution of filters.
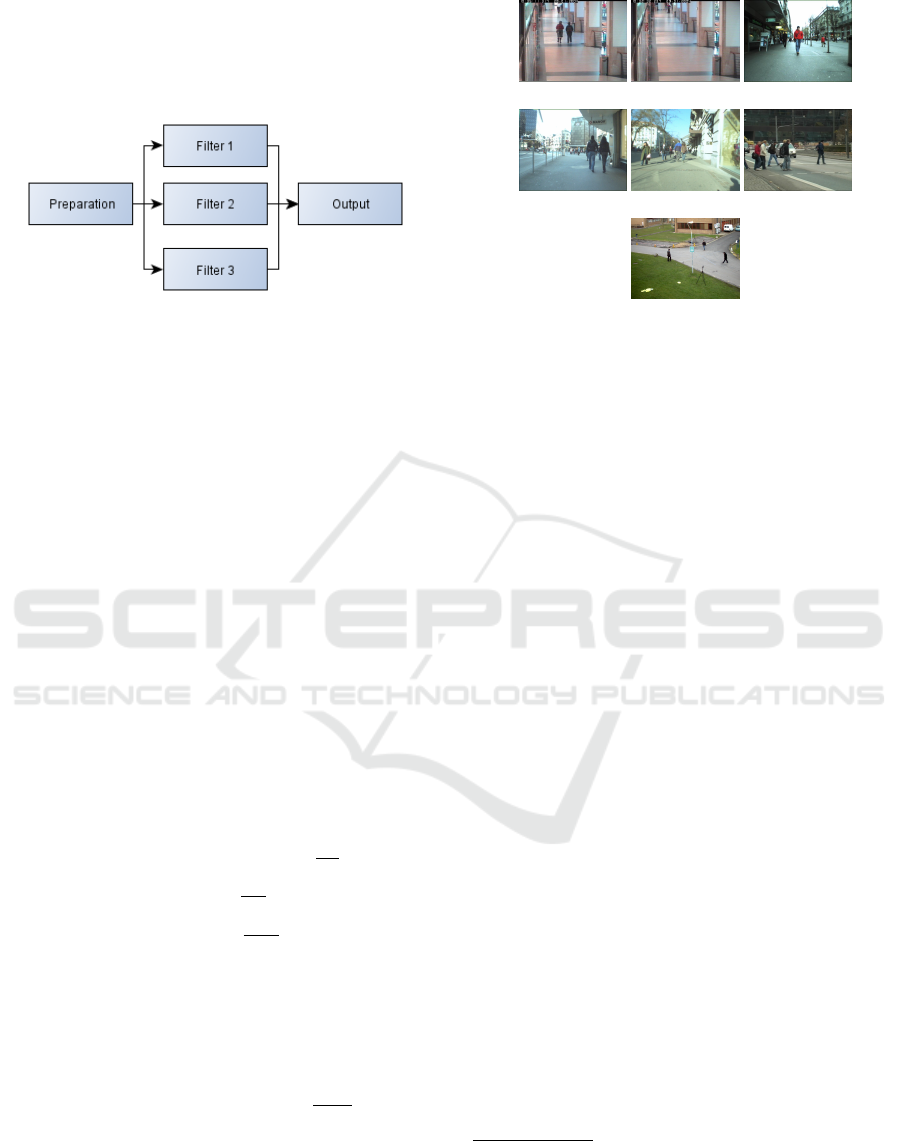
4.3 Our Bulk Variant
One of the strategies to improve the performance of
GPU computation is to group memory transfers and
kernel executions together because the overhead (both
CPU and GPU) of such tasks can be very high. This
reflects the ”bulk” mode, where we aggregate all the
tracker data in current frame (particles, templates etc.)
and transfer them at once (computation order can be
seen in Figure 2).
In our GPU variant, we compute the particle weights
with equation 1 by launching a one computation ker-
nel for all particles in one tracker. Thus in a scene
with N active trackers (targets), we launch the kernel
N times with different particle data. The BULK vari-
ant groups all particles from all tracker into groups
and executes the kernel just once.
The negative effect of this approach is the need for
data aggregation and change monitoring. In single
tracker variant, the data are tied to each tracker and its
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
126
layout does not change over time. In case of bulk vari-
ant the data are combination of data from all trackers,
so in case a tracker is created or dies we have to re-
generate the data on GPU to reflect this change.
Figure 2: Bulk execution of filters.
5 EXPERIMENTS AND RESULTS
The objective of the paper is to assess the perfor-
mance of GPU in MOT scenarios. The evaluations
are split in two parts: first is to test if the precision
of GPU framework is different from CPU implemen-
tation. Second part of the evaluations focus on the
performance of the two proposed variants. Here be-
low we provide an overview on used metrics, test data
and obtained results.
5.1 Evaluation Metrics
To compare the quality of the results between
CPU and GPU implementations, we have utilized
the prevalent CLEAR-MOT metrics (Bernardin and
Stiefelhagen, 2008). These metrics are principally
based on computation of two quantities: the Multi-
Object Tracking Accuracy (MOTA) and the Multi-
Object Tracking Precision (MOTP). The MOTA =
1 − (F
P
+ F
N
+ Id
sw
), where F
P
=
∑
t
FP
t
g
t
quantifies
total false positives, F
N
=
∑
t
FN
t
g
t
quantifies the total
false negatives, and Id
sw
=
∑
t
Id
sw
,t
g
t
quantifies total id
switches, all divided by the ground truth targets and
summed over the entire dataset. The MOTP is the
average bounding box overlap between the estimated
target position and ground truth annotations over the
correctly tracked targets. A tracker estimated rect-
angular position (noted R
T
) is considered a correct
track if its overlapping area score, sc =
R
t
∩G
t
R
t
∪G
t
, with the
ground truth annotation (G
T
) is above a given thresh-
old τ, which is usually set to 0.5.
For the performance comparison we have measured
total execution time including data preparation be-
fore the filtering and also data retrieval after the fil-
tering. This approach penalizes the GPU version due
(a) (b) (c)
(d) (e) (f)
(g)
Figure 3: Images from used datasets.
to the need of GPU to CPU data copying for dis-
play, but it better reflects real world performance and
behavior. The times were measured with millisec-
ond precision using std::chrono class. The ex-
periments were conducted on a PC with Intel Xeon
E3-1241@3.5GHz, 8GB RAM, NVidia Quadro K420
with 1GB VRAM. The OS was Linux 12.04 LTS with
all update available at the time, NVidia binary driver
v364.19, NVidia CUDA 7.5 and as a compiler we
have used nvcc v7.5.17 (bundled with CUDA pack-
age). All computations have been run ten times to
account the stochastic nature of the algorithm.
5.2 Test Data
In order to properly evaluate the performance of the
implementations we ran the tests on several datasets
with different scene and people settings. We have
used a total of 7 datasets (sample images can be
seen in Figure 3): the CAVIAR
1
EnterExitCross-
ingPaths [3(a)] and OneShopOneWait
1
[3(b)] datasets,
the ETH
2
Bahnhof [3(c)], Jelmoli [3(d)], Sunnyday
[3(e)] datasets, TUD
3
Crossing [3(f)] dataset and
PETS2009S2L12
4
[3(g)] dataset.
As for people detector, we have used several
widely used detectors in order to take into account the
dynamics of the scene.
HOG-SVM. This detector computes local his-
tograms of the gradient orientation on a dense grid
and uses linear Support Vector Machine (SVM) as
a classifier. The HOG features have shown to be
the most discriminant features to date, and in fact,
1
http://homepages.inf.ed.ac.uk/rbf/CAVIARDATA1/
2
https://data.vision.ee.ethz.ch/cvl/aess/dataset/
3
https://www.mpi-inf.mpg.de/departments/computer-
vision-and-multimodal-computing/software-and-datasets/
4
http://www.cvg.reading.ac.uk/PETS2009/a.html
Trade-off Between GPGPU based Implementations of Multi Object Tracking Particle Filter
127

a majority of detectors proposed hence-after make
use of HOG or its variant (Doll
´
ar et al., 2012).
Further details can be found in (Dalal and Triggs,
2005).
ACF. This is a fast person detector that has shown
state-of-the-art performance on various bench-
mark datasets (Doll
´
ar et al., 2014). It is based
on aggregates (summed over blocks) of features
represented as channels and a variant of Boosted
classifier. Examples of features channels used in-
clude: normalized amplitude of the gradient, the
histograms of oriented gradients (HOG, 6 chan-
nels) and color channels (LUV).
DPM. Contrary to HOG and ACF which detect per-
sons full body, the DPM is a parts based detec-
tor that works by aggregating evidence of differ-
ent parts of a body to detect a person in an im-
age. Its trained model is divided in different parts.
For instance, a target model could be made up of
a head, upper body, and lower body sub-models.
Each detected area has its own score. Thus, it is
possible to tune the threshold in order to remove
detections that have low scores. Since this detec-
tor relies on parts, and not solely on a full body, it
detects partially occluded people rather well. Ad-
ditionally, it also has better localization accuracy
as it infers bounding box based on detected body
parts. The detector uses variants of HOG features
with Latent-SVM as classifier. Further details can
be found in (Felzenszwalb et al., 2010).
5.3 Threading and Parallel Execution
In order to achieve good performance with CPU vari-
ant, we have used threads to run some parts of the
computation in parallel. The first place where we have
used threads, is concurrent particle filtering (resam-
pling, sampling and weighing) and model update. We
can update the model with information from current
frame, while we run filtering (we call this mode of
execution ”Interleaving”). Next place for parallel ex-
ecution is at the level of particle filters. The filters
in decentralized form of particle filter are completely
independent, so we can run the computation of all fil-
ters concurrently. Another place suitable for parallel
computation is inside the filter, namely the computa-
tion for each particle. However the number of parti-
cles is usually quite high, so the price of thread han-
dling would be much bigger than the gain from paral-
lel computation.
Table 1 sums all available execution modes. We have
separated particle filtering and model update in terms
of parallel computation because this allowed us to use
threaded parallel computation for model update also
Table 1: Summary of available execution modes.
Phase Available options
Particle filtering CPU GPU GPU-BULK
Interleaving YES NO
Filter execution SERIALPARALLEL
Model update SERIALPARALLEL
for GPU computation. The main group is ”Particle
filtering,” which denotes concrete implementation of
the particle filter. The other groups can help speed
up the computation, but we soon found out that the
most parallel version (with interleaved filtering and
model update, both run in parallel) is not always the
fastest. This is due to possibly large count of tar-
gets in dataset, which leads to high number of run-
ning threads and thus high overhead of thread control.
We always ran the test for one type of particle filter-
ing implementation and all possible combinations of
secondary groups (GPU-BULK variant does not al-
low serial filter execution) and always picked the best
performing variant for each dataset.
5.4 CLEAR-MOT Evaluation
The results in Table 2 were obtained running all three
variants on PETSS2L1 with 50 particles per tracker
and with all people detectors. The results are pre-
sented as mean / standard deviation, annotated µ/σ.
As can be seen, the differences between all variants
are negligible. This means that the switch to single
precision floating point numbers has no significant
impact on result quality.
Table 2: CLEAR-MOT results on PETSS2L1 with 50 par-
ticles per tracker.
Device MOTP MOTA
CPU-PF .73 / .00 .57 / .01
GPU-PF .71 / .01 .54 / .02
GPU-BULK-PF .72 / .00 .55 / .01
Device T
p
F
p
F
n
ID
sw
CPU-PF .67 / .01 .1 / .01 .32 / .01 35.1 / 3.8
GPU-PF .68 / .02 .2 / .01 .35 / .02 38.4 / 3.8
GPU-BULK-PF .66 / .00 .1 / .00 .33 / .01 36.2 / 4.3
5.5 Speedup
Figure 4 presents speedups of both GPU variants ver-
sus CPU variant for detector with 50 particles. The
average speedup for GPU variant is 5 as for GPU-
BULK variant the average speedup is about 4. The
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
128
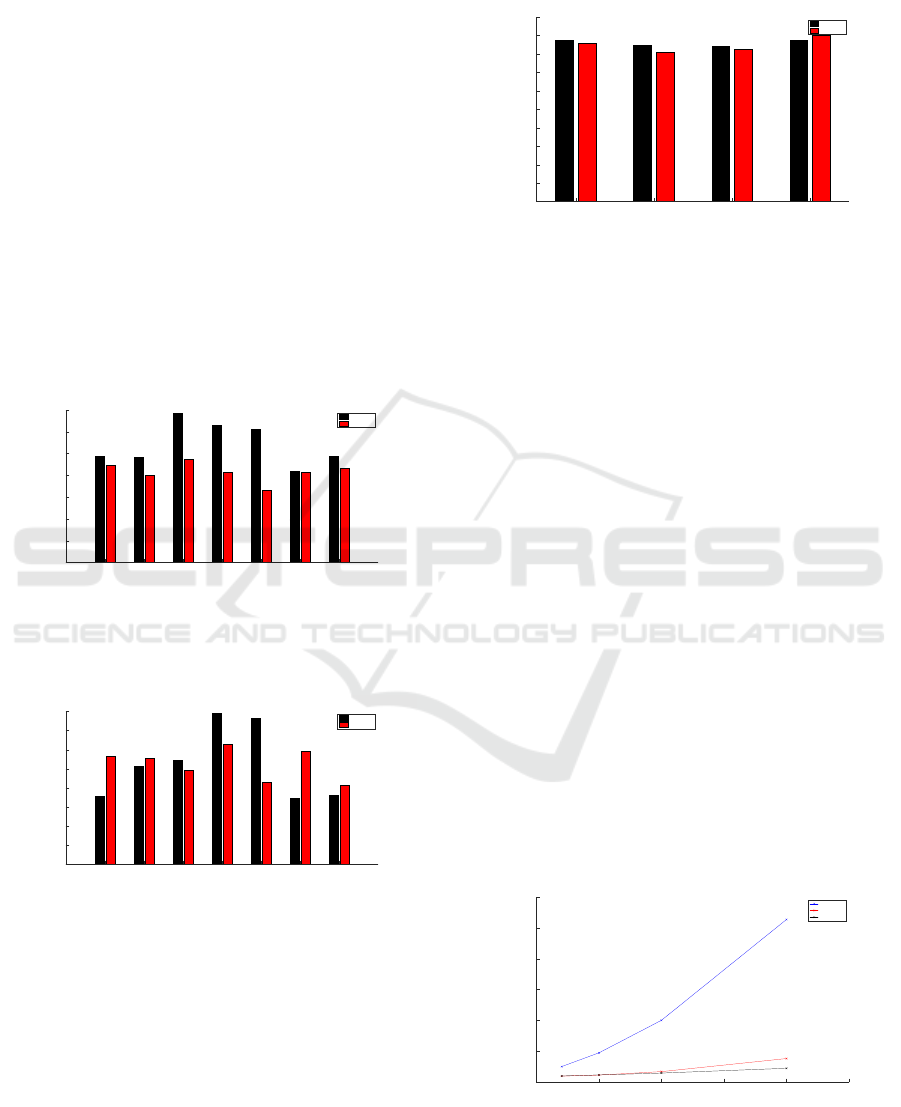
variance in speedups for different datasets is due to
varying people count and overall scene dynamics (e.g.
number of people entering and leaving the scene, av-
erage life time of the tracker etc.). For 50 parti-
cles per tracker, the BULK variant always performs
worse than GPU variant. But if we look at figure
5 representing configuration with 200 particles per
tracker we can see that the performance of BULK im-
proves. From the figure 5 we can see that the GPU
variant’s performance compared to BULK variant
is best for EnterExitCrossingPath1cor and OneSho-
pOneWait1cor. These recordings have the lowest dy-
namics in terms of people appearing and disappearing
in the scene.
From the obtained results we have concluded that the
BULK variant is more suitable for scenes with high
number of tracker count changes. GPU is best suit-
able for tracking ”closed” scenes, where the targets
are not entering or leaving the scene too often.
ETH-Bahnhof
ETH-Jelmoli
ETH-Sunnyday
EnterExitCrossingPaths1cor
OneShopOneWait1cor
PETS-S2L1
TUD-Crossing
Speedup [1]
0
1
2
3
4
5
6
7
GPU
GPU-BULK
Figure 4: Speedup compared to CPU variant (50 particles
per tracker, HOG tracker).
ETH-Bahnhof
ETH-Jelmoli
ETH-Sunnyday
EnterExitCrossingPaths1cor
OneShopOneWait1cor
PETS-S2L1
TUD-Crossing
Speedup [1]
0
2
4
6
8
10
12
14
16
GPU
GPU-BULK
Figure 5: Speedup compared to CPU variant (200 particles
per tracker, HOG tracker).
Figure 6 further emphasizes the influence of target dy-
namics on performance. The figure shows that BULK
variant is more sensitive to dynamics, the speedup dif-
ference for DPM and LDCF INRIA object detectors
is almost 0.5. The effect on GPU variant is much
smaller (maximal difference is 0.2), but is still notice-
able. This means that when considering which im-
plementation to choose, it is not enough to base the
choice on simple scene dynamics evaluation, but we
also have to consider the properties of the object de-
tector.
ACFInria
DPM
HOG
LDCFInria
Speedup [1]
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
GPU
GPU-BULK
Figure 6: Speedup compared to CPU variant with different
object detectors (50 particles per tracker, PETS2009S2L12
dataset).
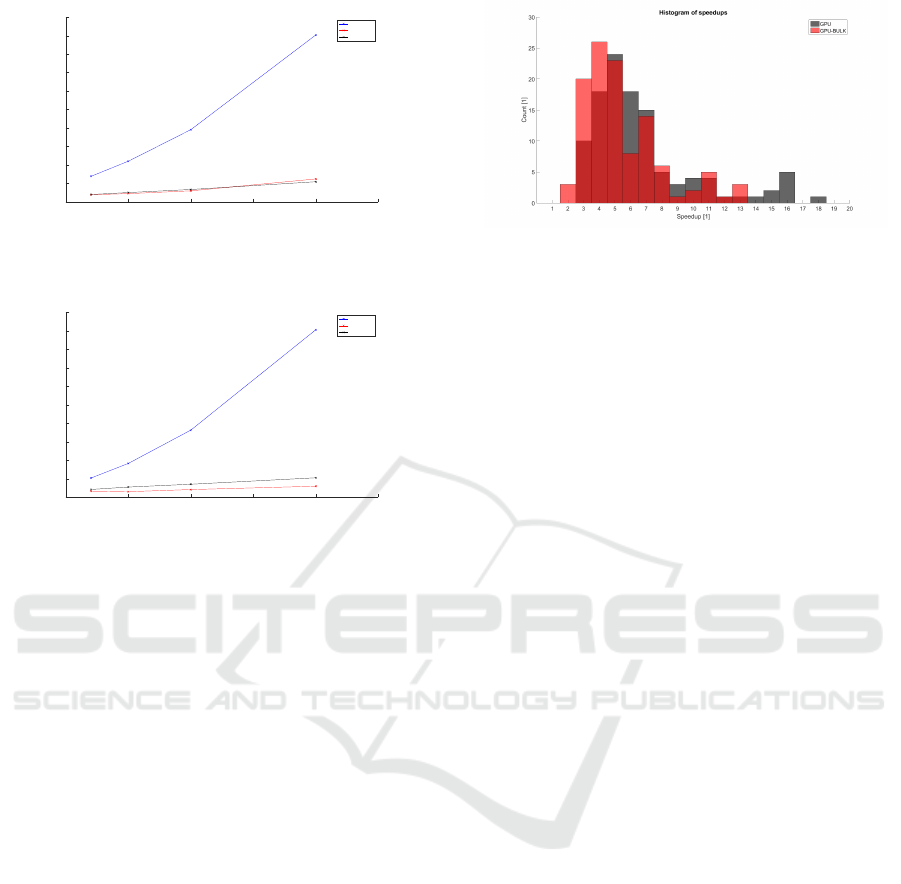
5.6 Execution Time vs Particle Number
The performance scaling comparison with different
number of particles per tracker can be seen in Fig-
ures 7 (PETS2009S2L12 dataset), 8 (TUD Crossing
dataset) and 9 (OneShopOneWait dataset), all three
figures used HOG people detector.
All three tested variants exhibit almost linear depen-
dency on particle count in all three figures. CPU vari-
ant is always the slowest one, even for 20 particles
per tracker. For OneShopOneWait dataset the per-
formance for 20 particles per tracker is very close to
GPU and BULK variant, but this is because of low
tracker count. Due to low tracker count the GPU and
BULK variants have almost constant execution time
for all particle counts, because the graphic card is not
fully utilized. The GPU-BULK variant exhibits best
performance in terms of scaling, but due to the fixed
cost of data preparation needed it is better suited for
scenarios with larger data size. In cases where we
have used low particle count per tracker or the scenes
contain only small number of tracker the GPU variant
is superior.
Particle number per tracker [1]
0 50 100 150 200 250
Time [ms]
0
100
200
300
400
500
600
CPU
GPU
GPU-BULK
Figure 7: Execution time vs particle number
(PETS2009S2L12 dataset, HOG detector).
Trade-off Between GPGPU based Implementations of Multi Object Tracking Particle Filter
129
Particle number per tracker [1]
0 50 100 150 200 250
Time [ms]
0
50
100
150
200
250
300
350
400
450
500
CPU
GPU
GPU-BULK
Figure 8: Execution time vs particle number (TUD Crossing
dataset, HOG detector).
Particle number per tracker [1]
0 50 100 150 200 250
Time [ms]
0
20
40
60
80
100
120
140
160
180
200
CPU
GPU
GPU-BULK
Figure 9: Execution time vs particle number (OneSho-
pOneWait dataset, HOG detector).
5.7 Speedup Stability
Figure 10 provides a statistics of achieved speedups.
Each bar represents count of data configurations
(dataset - detector - particle number) that achieved
given speedup (speedups were rounded to nearest
integer).Notice that, for instance, 26 variants have
achieved speedup of 4. We can also notice that GPU
variant is generally faster, but the BULK variant pro-
vides more similar results. For general use the aver-
age speedup is more important, but Figure 10 high-
lights that both variants can achieve much higher
speedups in some cases. This is due to CUDA work
sizes used to launch the kernels. They have been opti-
mized on one data configuration and then used for all
tests. By optimizing the launch parameters for each
data configurations separately the speedup would be
much better with maximal values at the right side of
the statistics (around 12x for BULK variant and 15 for
GPU variant).
When we compile all the presented results, we can
safely conclude that it is beneficial to use GPU to
speedup the MOT algorithm. The choice of concrete
implementation depends on two factors - required par-
ticle number and characteristics of captured video,
mainly the dynamics of people entering / leaving the
scene. The GPU variant offers good performance for
more static scenes and for lower particle counts due to
Figure 10: Statistics of speedups for GPU variants.
easier memory handling. The BULK variant handles
better more dynamic scenes due to the fact that the
cost of memory handling is almost independent from
the number of filters. Another benefit of BULK vari-
ant is better performance for higher particle numbers
due to batch processing. Such insights have not been
yet highlighted in the literature.
6 CONCLUSIONS AND FUTURE
WORK
In this work, we have presented two GPU imple-
mentations of decentralized particle tracker with rich
appearance model based on templates. The results
show overall performance boost by factor of at least
5, while for best cases the boost is around 18. These
results have been achieved for relatively low particle
numbers (50 particles per tracker, average number of
tracker in one frame was around 5) compared to pre-
vious works. We have also showed that the use single
precision arithmetic due to GPU limitations does not
affect the precision of the results.
As a future work, an investigation on dynamic op-
timal group size computation could provide another
significant boost to the performance due to always op-
timal use of GPU resources. Another interesting line
of work could be full GPU implementation of track-
ing (both detection and filtering) by coupling existing
GPU implementation of object detectors (for exam-
ple (Sudowe and Leibe, 2011) or (Hirabayashi et al.,
2013)) with our solution to further improve perfor-
mances. The full GPU implementation would be es-
pecially suited for tracker with low particle numbers,
where the speedup of the filtering with GPU is not
high.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
130

ACKNOWLEDGMENTS
The work of P. Jecmen was supported by the Ministry
of Education of the Czech Republic within the SGS
project no. 21176/115 of the Technical University of
Liberec.
The work of F. Lerasle and A. A. Mekonnen was sup-
ported by grants from the French DGA under grant
reference SERVAT RAPID-142906073.
REFERENCES
Bernardin, K. and Stiefelhagen, R. (2008). Evaluating mul-
tiple object tracking performance: The clear mot met-
rics. EURASIP Journal on Image and Video Process-
ing.
Breitenstein, M. D., Reichlin, F., Leibe, B., Koller-Meier,
E., and Gool, L. V. (2011). Online multiper-
son tracking-by-detection from a single, uncalibrated
camera. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 33(9):1820–1833.
Chao, M. A., Chu, C. Y., Chao, C. H., and Wu, A. Y. (2010).
Efficient parallelized particle filter design on cuda. In
2010 IEEE Workshop On Signal Processing Systems,
pages 299–304.
Chitchian, M., van Amesfoort, A. S., Simonetto, A., Ke-
viczky, T., and Sips, H. J. (2013). Adapting particle
filter algorithms to many-core architectures. In s.n.,
editor, Proceedings of the 2013 IEEE 27th Interna-
tional Parallel and Distributed Processing Symposium
(IPDPS), pages 427–438. IEEE Computer Society.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In 2005 IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition (CVPR’05), volume 1, pages 886–893
vol. 1.
Doll
´
ar, P., Appel, R., Belongie, S., and Perona, P. (2014).
Fast feature pyramids for object detection. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 36(8):1532–1545.
Doll
´
ar, P., Wojek, C., Schiele, B., and Perona, P. (2012).
Pedestrian detection: An evaluation of the state of the
art. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence (PAMI), 34(4):743–761.
Doucet, A., Godsill, S., and Andrieu, C. (2000). On se-
quential monte carlo sampling methods for bayesian
filtering. Statistics and Computing, 10(3):197–208.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., and
Ramanan, D. (2010). Object detection with discrimi-
natively trained part-based models. IEEE Trans. Pat-
tern Anal. Mach. Intell., 32(9):1627–1645.
Ger
´
onimo Gomez, D., Lerasle, F., and L
´
opez Pe
˜
na, A. M.
(2012). State-Driven Particle Filter for Multi-person
Tracking, pages 467–478. Springer Berlin Heidelberg,
Berlin, Heidelberg.
Hendeby, G., Karlsson, R., and Gustafsson, F. (2010). Par-
ticle filtering: The need for speed. EURASIP J. Adv.
Signal Process, 2010:22:1–22:9.
Hirabayashi, M., Kato, S., Edahiro, M., Takeda, K.,
Kawano, T., and Mita, S. (2013). Gpu implementa-
tions of object detection using hog features and de-
formable models. In 2013 IEEE 1st International
Conference on Cyber-Physical Systems, Networks,
and Applications, pages 106–111. IEEE.
Isard, M. and Blake, A. (1998). Condensation - conditional
density propagation for visual tracking. International
Journal of Computer Vision, 29:5–28.
Itu, L. M., Suciu, C., Moldoveanu, F., and Postelnicu,
A. (2011). Comparison of single and double float-
ing point precision performance for tesla architecture
gpus. Bulletin of the Transilvania University of Brov
Series I: Engineering Sciences, 4:70–86.
Khan, Z., Balch, T., and Dellaert, F. (2005). Mcmc-based
particle filtering for tracking a variable number of in-
teracting targets. IEEE Transactions on Pattern Anal-
ysis and Machine Intelligence, 27(11):1805–1819.
Li, T., Bolic, M., and Djuric, P. M. (2015). Resampling
methods for particle filtering: Classification, imple-
mentation, and strategies. IEEE Signal Processing
Magazine, 32(3):70–86.
Li, Y., Ai, H., Yamashita, T., Lao, S., and Kawade, M.
(2008). Tracking in low frame rate video: A cascade
particle filter with discriminative observers of differ-
ent life spans. Pattern Analysis and Machine Intelli-
gence, IEEE Transactions on, 30(10):1728–1740.
Medeiros, H., Park, J., and Kak, A. (2008). A paral-
lel color-based particle filter for object tracking. In
Computer Vision and Pattern Recognition Workshops,
2008. CVPRW ’08. IEEE Computer Society Confer-
ence on, pages 1–8.
Nickolls, J., Buck, I., Garland, M., and Skadron, K. (2008).
Scalable parallel programming with cuda. Queue,
6(2):40–53.
Perez, P., Vermaak, J., and Blake, A. (2004). Data fusion
for visual tracking with particles. Proceedings of the
IEEE, 92(3):495–513.
Rost, R. J. (2006). OpenGL Shading Language. Addison
Wesley Professional.
Rosn, O., Medvedev, A., and Ekman, M. (2010). Speedup
and tracking accuracy evaluation of parallel particle
filter algorithms implemented on a multicore architec-
ture. In 2010 IEEE International Conference on Con-
trol Applications, pages 440–445.
Rymut, B. and Kwolek, B. (2010). GPU-Accelerated
Object Tracking Using Particle Filtering and
Appearance-Adaptive Models, pages 337–344.
Springer Berlin Heidelberg, Berlin, Heidelberg.
Sudowe, P. and Leibe, B. (2011). Efficient Use of Geomet-
ric Constraints for Sliding-Window Object Detection
in Video. In International Conference on Computer
Vision Systems (ICVS’11).
Zhang, J., Presti, L. L., and Sclaroff, S. (2012). Online
multi-person tracking by tracker hierarchy. In Ad-
vanced Video and Signal-Based Surveillance (AVSS),
2012 IEEE Ninth International Conference on, pages
379–385. IEEE.
Trade-off Between GPGPU based Implementations of Multi Object Tracking Particle Filter
131
