
Persistence-based Interest Point Detection for 3D Deformable Surface
Xupeng Wang
1,3
, Ferdous Sohel
2
, Mohammed Bennamoun
3
, Yulan Guo
4,3
and Hang Lei
1
1
School of Information and Software Engineering, University of Electronic Science and Technology of China,
Chengdu, China
2
School of Engineering and Information Technology, Murdoch University, Perth, Australia
3
School of Computer Science and Software Engineering, University of Western Australia, Perth, Australia
4
College of Electronic Science and Engineering, National University of Defense Technology, Changsha, China
Keywords:
3D Deformable Shapes, Interest Point Detection, Persistent Homology, Diffusion Geometry, Heat Kernel
Signature Function.
Abstract:
Several approaches for interest point detection on rigid shapes have been proposed, but few are available for
non-rigid shapes. It is a very challenging task due to the presence of the large degrees of local deformations.
This paper presents a novel method called persistence-based heat kernel signature (pHKS). It consists of two
steps: scalar field construction and interest point detection. We propose to use the heat kernel signature
function at a moderately small time scale to construct the scalar field. It has the advantage of being stable
under various transformations. Based on the predefined scalar field, a 0-dimensional persistence diagram is
computed, and the local geometric and global structural information of the shape are captured at the same time.
Points with local maxima and high persistence are selected as interest points. We perform a comprehensive
evaluation on two popular datasets (i.e., PHOTOMESH and Interest Points Dataset) to show the effectiveness
of our method. Compared with existing techniques, our interest point detector achieves a superior performance
in terms of repeatability and distinctiveness.
1 INTRODUCTION
With the increasing availability of low-cost 3D sen-
sors (e.g., Microsoft Kinect), there is a growing de-
mand for 3D surface analysis (Biasotti et al., 2015).
The representation of 3D surfaces is a challenging
task due to the presence of noise, occlusion, clutter
and a wide range of shape transformations (Guo et al.,
2013b)(Bronstein et al., 2011)(Litman and Bronstein,
2014).
A popular approach to measure the similarities of
3D surfaces is based on a collection of local features
(Guo et al., 2014a)(Guo et al., 2016). Local feature-
based approaches (Guo et al., 2013a)(Guo et al.,
2013d)(Guo et al., 2013c)(Guo et al., 2014b)(Wang
et al., 2016)(Wang et al., 2015) have been actively
investigated for the past two decades and are com-
monly used in many applications including 3D object
recognition, 3D reconstruction, 3D shape retrieval,
registration and tracking. Local feature based sur-
face description generally consists of two steps: inter-
est point detection and feature description (Tombari
et al., 2013). Prominent points on a shape with re-
spect to a particularly defined saliency or interest are
first detected based on surface analysis. Then, the lo-
cal surface around each interest point is described us-
ing a 3D surface descriptor. Finally, the descriptors
around the interest points are properly assembled to
map the surface into a feature space.
Interest point detection is a fundamental step be-
cause it identifies a collection of 3D structures for
further surface description (Guo et al., 2014a). A
number of 3D interest point detectors have been pro-
posed, and most of them are designed for rigid sur-
faces (Pratikakis et al., 2010)(Mian et al., 2010)(Godil
and Wagan, 2011) (see (Guo et al., 2014a) for a re-
cent survey). In recent years, several studies (Sun
et al., 2009)(Zaharescu et al., 2012) have been pro-
posed for non-rigid shape analysis. In particular, dif-
fusion geometry achieves a superior performance be-
cause of its ability to reflect the intrinsic property
of a shape (Bronstein et al., 2011). The heat ker-
nel signature function, also known as the auto dif-
fusion function, was proposed as a local surface de-
scriptor (Sun et al., 2009) or a definition of the scalar
field (Gbal et al., 2009). This function has been suc-
58
Wang X., Sohel F., Bennamoun M., Guo Y. and Lei H.
Persistence-based Interest Point Detection for 3D Deformable Surface.
DOI: 10.5220/0006093800580069
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 58-69
ISBN: 978-989-758-224-0
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

cessfully applied for surface matching (Sipiran and
Bustos, 2013)(Ganapathi-Subramanian et al., 2016),
shape retrieval (Bronstein et al., 2011) and shape seg-
mentation (Skraba et al., 2010). Our method takes
advantage of the heat kernel signature function for its
intrinsic property to describe a surface.
Distinctiveness and repeatability are considered as
two major characteristics of a 3D detector (Tombari
et al., 2013)(Dutagaci et al., 2012). Repeatability
measures the capability of an interest point detector
to find the same set of interest points under various
nuisances, such as sensor noise, missing parts and
transformations. Distinctiveness measures the abil-
ity to detect the most salient and representative points
on the shape for feature description. Since distinc-
tiveness is a rather global property of a shape, it is
quite challenging to effectively achieve this property
by current 3D interest point detectors, because they
are based on the analysis of local surfaces (Tombari
et al., 2013).
Inspired by the recent advances in persistent ho-
mology for the characterization of function behavior
(Li et al., 2014)(Carri
`
ere et al., 2015), we propose a
framework to combine persistent homology with the
heat kernel signature function for interest point detec-
tion. First, the scalar field is constructed using the
heat kernel signature function at a moderately small
time scale. The heat kernel signature function (Sun
et al., 2009) is originated from diffusion geometry,
and the signature is robust to isometric transforma-
tions. When computed at a small time scale, it is di-
rectly related to surface curvature and has been shown
to be informative (Bronstein et al., 2011). Second,
a 0-dimensional persistence diagram is computed to
capture the global structural information of a surface.
The saliency of a point is considered as its promi-
nence from the view of topological persistence. Due
to the intrinsically global property of the persistent
homology to describe the surface variations, our pro-
posed interest point detector is highly distinctive.
The main contribution of this paper is two-fold.
First, a new interest point detector is proposed for
non-rigid 3D surface analysis. Second, persistence
homology is used for interest point detection to
achieve high repeatability and strong distinctiveness.
The remainder of this paper is organized as fol-
lows. Section 2 discusses the related work and em-
phasizes on our contribution to achieve repeatable and
distinctive interest point detection on non-rigid sur-
faces. Section 3 introduces our proposed persistence-
based interest point detector. Section 4 presents a
comprehensive performance evaluation of our pro-
posed method and comparisons with the state-of-the-
art. Section 5 concludes the paper.
2 RELATED WORK
Over the past decades, a large number of 3D interest
point detection methods have been proposed for shape
analysis. Most existing interest point detectors for 3D
shapes concentrated on the stability under rigid sur-
face transformations (Tombari et al., 2013)(Guo et al.,
2014a).
In order to deal with shapes undergoing non-rigid
deformations, detectors that are invariant to isometric
transformations have also been proposed. The sim-
plest interest point detection method is fastest point
sampling in the geodesic metric space, which is quite
popular in this field (Aubry et al., 2011)(Litman and
Bronstein, 2014)(Xie et al., 2016). However, this
method fails to detect qualified interest points, espe-
cially in terms of informativeness. This is because
that it gives no consideration to the richness of the dis-
criminative information of the detected interest points
(Guo et al., 2014a).
Several approaches have been proposed to extend
interest point detectors developed in the 2D images
to the 3D field. Inspired by the SIFT method (Lowe,
2004), Difference-of-Gaussians (DOG) was used as a
saliency measure for interest point detection for 3D
shapes (Zaharescu et al., 2012)(Liu et al., 2016). The
scalar field on a shape was defined using a photomet-
ric or a geometric attribute and was convolved with
a set of Gaussian kernels. Then, DOG calculations
were performed on the convolution results and Mesh-
DOG interest points were selected as the maximum
points in the DOG scale space. This method is able
to detect a sufficient number of repeatable interest
points. However, it is sensitive to varying mesh reso-
lutions (Guo et al., 2014a). The popular Harris de-
tector for 2D image analysis (Harris and Stephens,
1988) was extended to 3D meshes in (Sipiran and
Bustos, 2011). The ‘Harris 3D’ detector first derives a
quadratic surface from the neighborhood of one point.
Derivatives were calculated by smoothing over the
surface, and these derivatives were used to calculate
the Harris response. A fixed fraction of points with
the largest response were selected as interest points.
This method is shown to be robust to several transfor-
mations. However, it uses a fixed-scale of the neigh-
borhood, and does not fully exploit the scale informa-
tion encoded in the local geometric structures (Guo
et al., 2014a).
The diffusion geometry has been applied for in-
terest point detection and achieved a good perfor-
mance. It is invariant to isometric transformations and
remains stable under surface pertubations. In (Sun
et al., 2009), the heat kernel function was restricted
to the temporal domain and used the local maximum
Persistence-based Interest Point Detection for 3D Deformable Surface
59
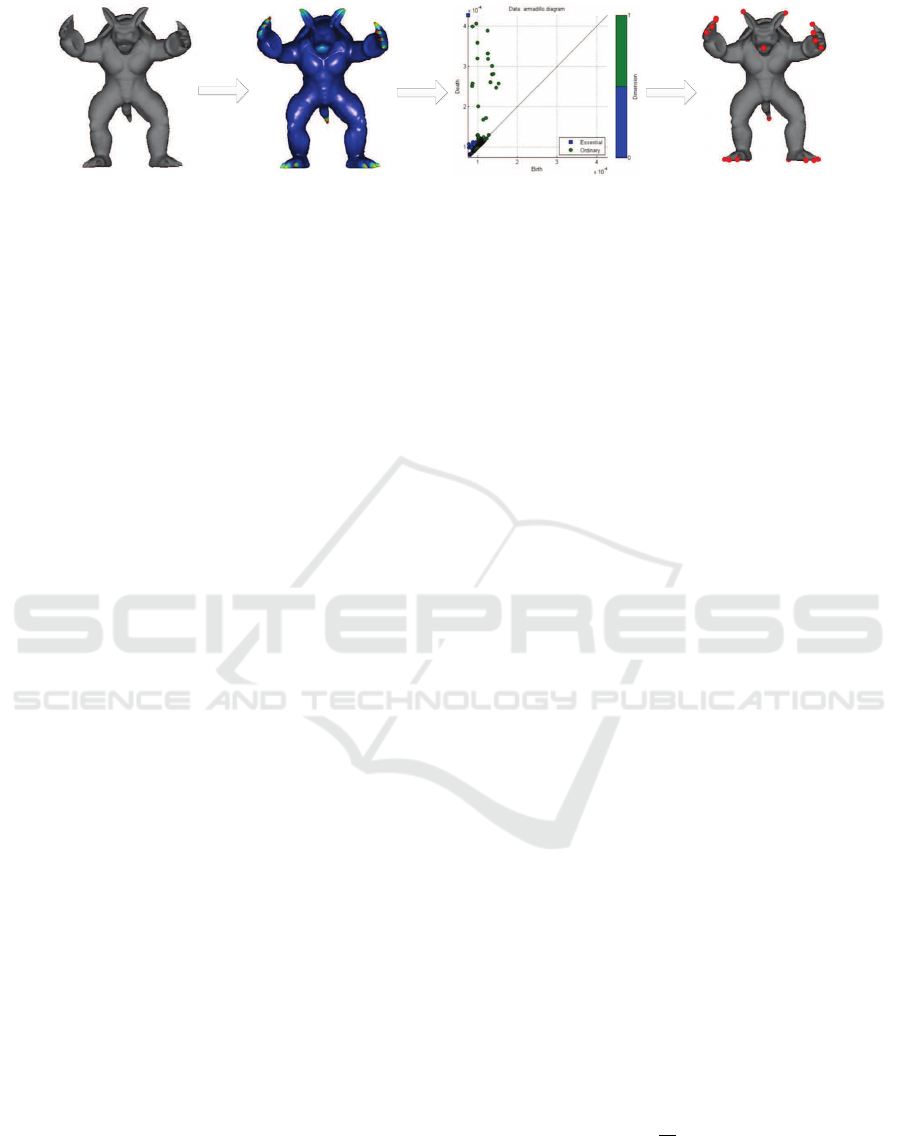
(a) Input shape
(b) Scalar field
definition
(c) Persistence diagram
computation
(d) detected keypoints
Figure 1: An illustration of the proposed persistence-based interest point detector. (a) An input 3D model of Armadillo. (b)
The scalar field generated for the shape using the auto diffusion function with a particular time scale. (c) The 0-dimensional
persistence diagram of the predefined real-valued function. (d) Interest points extracted using our proposed interest point
detector.
of the function to find interest points. The local max-
imum is obtained by comparing each point with its
2-ring neighborhoods. This method is able to detect
highly distinctive interest points, but it depends on the
mesh resolution (Guo et al., 2014a). Our method ex-
ploits the heat kernel signature function by combining
it with the concept of persistent homology, which is
more robust than the method proposed in (Sun et al.,
2009).
All these interest point detectors are proposed
based on the analysis of the local surface, and they
tend to detect points with local maximums using a
saliency measure. As a result, they are not highly dis-
tinctive (Tombari et al., 2013). Our work is motivated
by the recent advances in topological data analysis,
i.e., the theory of persistent homology (Edelsbrunner
and Harer, 2010)(Chazal et al., 2013). Persistence
homology summarizes the structure of a topological
space in a compact and provably stable way using a
persistence diagram (Carri
`
ere et al., 2015). This ap-
proach has been proved to be stable (Chazal et al.,
2009) and has been successfully applied to cluster-
ing (Chazal et al., 2013), shape segmentation (Skraba
et al., 2010), shape matching and retrieval (Carri
`
ere
et al., 2015)(Garro and Giachetti, 2016).
3 PROPOSED METHOD
Assume M is a compact 2D manifold embedded in
R
3
without boundary and mesh M is a discrete repre-
sentation of M . M consists of n
V
vertices, n
E
edges
and n
F
convex polygons (i.e. facets). M can be
viewed as a connectivity graph G= (V ,E), where the
set of vertices V = {v
1
,v
2
,...,v
n
V
} represents sam-
ples on the manifold, E = {(v
i
,v
j
)} represents the re-
lationship between adjacent vertices. Each vertex v
i
is associated with a 3D point in the Euclidean space,
i.e., v
i
∈ R
3
. M may undergo a non-rigid transforma-
tion. Our goal is to develop an interest point detector
which identifies 3D interest points from M with a high
repeatability, strong distinctiveness and a good invari-
ance to isometric deformations.
An illustration of the proposed 3D interest point
detection method is shown in Fig. 1. Our inter-
est point detection method follows a typical pipeline
(see (Zaharescu et al., 2012) for example) and com-
prises two steps: scalar field construction and inter-
est point detection. For an input shape, the first and
important step is the scalar function definition, since
its accuracy directly affects the subsequent processing
steps. Since our method is designed for deformable
surface analysis, this definition should be stable un-
der isometric deformations. We use the heat kernel
signature function (Gbal et al., 2009) with a moder-
ately small time scale for its remarkable resistence to
extrinsic and intrinsic shape variations. Figs. 1(a) and
(b) represent the original shape and the corresponding
scalar field, respectively. Then the 0-dimensional per-
sistence diagram of this real-valued function is com-
puted, where the prominence of the salient points is
encoded, as shown in Fig. 1(c). Finally, interest
points are selected as points with a local maximum
value and a high persistence (as shown in Fig. 1(d)).
3.1 Scalar Field Construction
3.1.1 Heat Diffusion Process
Imagine that there is an initial heat distribution over
M , and then heat starts to propagate. This heat diffu-
sion process over M is governed by the heat equation:
(4
M
+
∂
∂t
)u(x,t) = 0, (1)
where the solution u(x,t) represents the amount of
heat at a point x ∈ M at time t, and 4
M
denotes
the positive semi-definite Laplace-Beltrami operator
on M , a Riemannian equivalent of the Laplacian.
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
60

Given an initial heat distribution f : M → R, the
heat operator applied to f describes the distribution
of the heat over M at time t. That is, H
t
f = u(·,t)
with u(·,0) = f , where H
t
represents the heat opera-
tor.
For a square integrable function f , there always
exists a function h
t
(x,y) : R
+
×M × M → R satisfying
H
t
f (x) =
Z
M
h
t
(x,y) f (y)dy, (2)
where dy is the differential form of y ∈ M . The min-
imum function h
t
(x,y) satisfying Eq. 2 is called the
heat kernel. It measures the amount of heat that gets
transferred from x to y at time t with a unit heat source
initially located at x.
Since the heat operator is compact, self-adjoint
and positive semi-definite (Dey et al., 2010), it has
a discrete spectrum 1 = λ
0
≥ λ
1
≥ ... ≥ 0 with H
t
φ
i
=
λ
i
φ
i
. According to the Spectral Theorem, the heat ker-
nel has the following eigen-decomposition:
h
t
(x,y) =
∞
∑
i≥1
e
−λ
i
t
Φ
i
(x)Φ
i
(y), (3)
where λ
i
and Φ
i
are the ith eigenvalue and eigenfunc-
tion of the heat kernel, respectively.
The heat diffusion kernel function has a number
of properties making it suitable for surface descrip-
tion as a point signature (Sun et al., 2009). First, it
is isometrically invariant due to the invariance of the
Laplace-Beltrami operator. It can therefore be used
to analyze shapes under non-rigid deformations. Sec-
ond, it is informative as it captures all the intrinsic
geometric information of a shape. Consequently it
is able to fully characterize shapes up to isometry.
Third, it captures the geometric information around
an interest point with multiple scales. Since heat dif-
fuses progressively to larger neighborhoods, the time
parameter provides an intuitive notion of scale to de-
scribe the local surface. Specifically, the heat kernel
h
t
(x,·) with a small t encodes the local properties of
the surface around x. As heat dissipates from the in-
terest point to the rest of the shape, the scale of the
neighborhood is increased.
3.1.2 Heat Kernel Signature
To make the heat kernel concise and measurable, the
heat kernel function was restricted to the temporal do-
main only, that is:
HKS(x,t) =
∞
∑
i≥1
e
−λ
i
t
Φ
2
i
(x), (4)
which is known as the heat kernel signature (Sun
et al., 2009). This signature has also been proved to
inherit many useful properties from the heat kernel.
Particularly, there is an asymptotic expansion of the
heat kernel signature function as t approaches 0, that
is:
HKS(x,t) = (4πt)
−d/2
∞
∑
i=0
a
i
t
i
, (5)
where a
0
= 1 and a
1
=
1
6
s(x) with s(x) being the
scalar curvature at point x. For a 2D manifold, s(x) is
referred to as the Gaussian curvature at point x. This
formula corresponds to the well-known property of
the heat diffusion process, that is, heat tends to dif-
fuse faster at points with low curvature, and slower
at points with high curvature. Moreover, the heat dif-
fusion process at an early stage is dominated by the
intrinsic curvature of the manifold. Besides, the heat
kernel signature parameterized by a small t provides
a meaningful notion of curvature for the local surface
around x.
3.1.3 Scalar Field Construction
We use the heat kernel signature with a small time
scale to construct the scalar field. Examples are
shown in the top row of Fig. 3. Note that, areas with
high and low Gaussian curvatures correspond to large
and small values of HKS(x,t), respectively. In addi-
tion, the scalar field remains stable on the two horses
with non-rigid transformations.
Note that this scalar field construction approach is
also suitable for incomplete and partial shapes (Dey
et al., 2010)(Ovsjanikov et al., 2010), since the heat
kernel signature with small time scales represents the
properties of a local surface. To further enhance its
stability, edge points and outliers with extremely high
values compared to its neighborhood are removed.
3.1.4 Computation
In practice, the underlying manifold is unknown as
a sample of the shape, and it is usually given in the
form of a triangular mesh. In order to obtain the heat
kernel signature, the Finite Elements Method (Reuter
et al., 2006) is used to compute the eigenvalues and
eigenvectors of the Laplace-Beltrami operator associ-
ated with the shape.
3.2 Interest Point Detection
3.2.1 Persistence Diagram
Let f be a real-valued function defined on the nodes
of G, f : V → R. A node v ∈ V is called a peak
if its function value is a local maximum in its local
neighborhood, i.e., for all u with (u,v) ∈ E, f (v) ≥
Persistence-based Interest Point Detection for 3D Deformable Surface
61
p
s
q
s’
p’
q’
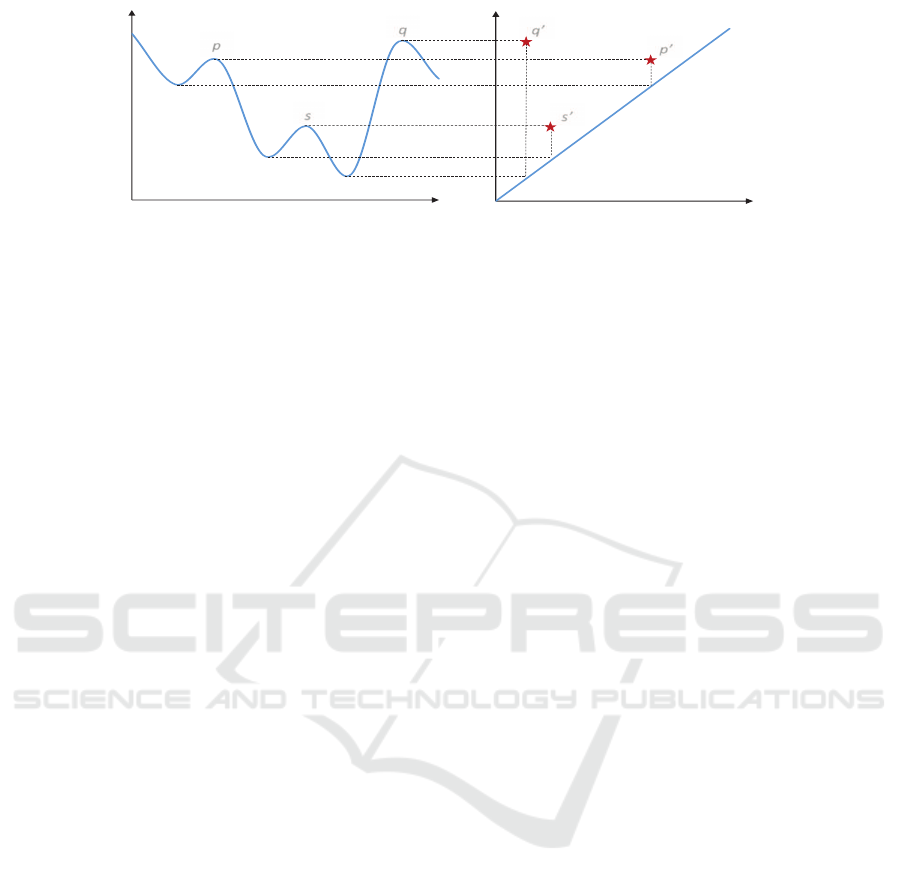
Figure 2: An illustration of the 0-dimensional persistence diagram computation. Left: a smooth function with three local
maximums. Right: 0-dimensional persistence diagram of the function.
f (u). The 0-dimensional persistence diagram en-
codes the topological changes of the sub-level sets
F
α
= f
−1
([α,+∞)) as α decreases from +∞ to −∞.
Let C(v,α) be a connected subgraph, C (v,α) ∈ F
α
∈
G, where α ≤ f (v) and f (v) is the largest value. The
subgraph is claimed to be born at v, or v represents
the component. The infimum of α with which f (v)
remains to be the global maximum in the component
is called the death of C (v,α). As α continues to de-
crease, the subgraph C (v, α) is merged into another
component.
The lifespan of a component is thus determined
by its birth f (v) and death values f (u) ≤ f (v). This
allows us to project each component onto a point
( f (u), f (v)) on a 2D plane. Persistence or promi-
nence of the component is defined as its lifespan, P =
f (v) − f (u) ≥ 0. The 0-dimensional persistence dia-
gram of f is computed by collecting all these points
together. In the diagram, all points live in the half
space above x
1
= x
2
, and their persistence can easily
be calculated as the vertical distance from the point
( f (u), f (v)) to this diagonal line (Edelsbrunner and
Harer, 2010). Figure 2 shows an illustration of the 0-
dimensional persistence diagram computation. It can
be seen that the topological information of a smooth
function can be captured by the 0-dimensional persis-
tence diagram.
3.2.2 Interest Point Detection
Similar to existing 3D feature detectors, interest
points are selected by considering local extrema of a
saliency measure. The saliency measure determines
the type of local surface to be selected by the detector,
and it is significantly important to the distinctiveness
and repeatability of the detector. We consider that the
saliency of a point is not only determined by its abso-
lute saliency measure, but also by its relative signif-
icance as compared to its neighboring points. From
the view of topological data analysis, interest points
are determined as those points with local maxima and
in particular, high persistence.
Since each component is represented by a peak,
the 0-dimensional persistence diagram can be ex-
plained in another way (Li et al., 2014). That is, the
persistence diagram encodes the relative prominence
of different peaks of a given function by considering
the connectivity information in the domain, as shown
in Fig. 2. Based on the predefined scalar function
(i.e., heat kernel signature with a small time scale),
the persistence diagram is able to select several peaks
with a high persistence, all of them are distinctive
points on a shape (as shown in Fig. 1(d)).
In addition, the persistence diagram has several
important properties and it is therefore highly suitable
for interest point detection. First, it is stable under
perturbations of the scalar function (Carri
`
ere et al.,
2015)(Chazal et al., 2009). Consequently, the persis-
tence diagram is highly robust to noise. Besides, it
is invariant to translation, rotation, scaling and non-
rigid transformations (as shown in Fig. 3), as long as
the scalar functions are consistent across shapes.
3.2.3 Computation
In practice, the 0-dimensional persistence diagram
can be computed using the Union-Find algorithm
(Cormen, 2009). It ranks the nodes of the graph with
respect to their scalar function values, and keeps track
of the evolution of the corresponding connected com-
ponents. In this paper, DIPHA (Bauer et al., 2014) is
used to compute the persistence diagram.
4 EXPERIMENTS
A comprehensive evaluation is performed to test our
interest point detector under two different scenarios.
Section 4.1 shows its performance evaluation on the
PHOTOMESH dataset (Zaharescu et al., 2012) in
terms of repeatability. In section 4.2, the performance
of our proposed interest point detector is compared
with several state-of-the-art methods on the Interest
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
62
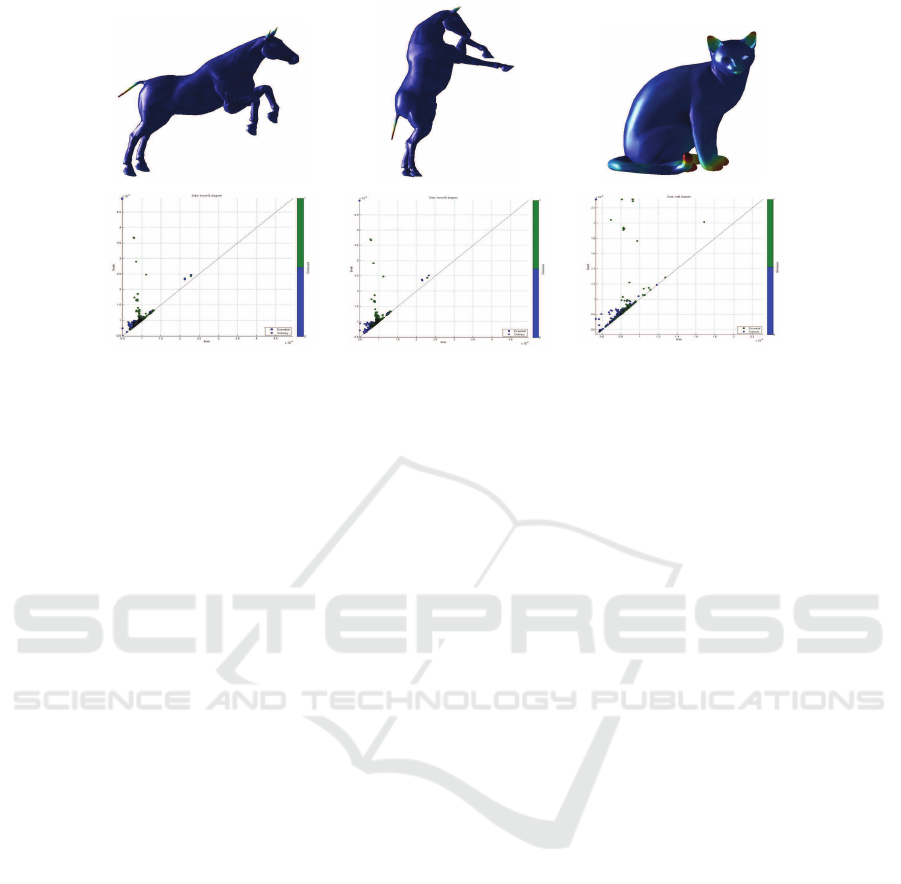
Figure 3: An illustration of the scalar fields on three shape modes from the TOSCA dataset (two horses with non-rigid
transformations and a cat), and their corresponding 0-dimensional persistence diagram. Top: Heat kernel signature with a
small and fixed time scale computed on these models. Note that values of the heat kernel signature function increase while
the color on the shape changes from blue to green and then to red. Bottom: The corresponding persistence diagram computed
from the real-valued function.
Points dataset (Dutagaci et al., 2012) in terms of dis-
tinctiveness, i.e., to measure how much the extracted
points are compatible with human perception.
4.1 Performance on The PHOTOMESH
Dataset
4.1.1 Dataset
The PHOTOMESH dataset consists of three base
shapes, so called null shapes. The simulated trans-
formations applied to these null shapes can be clas-
sified into two categories: photometric transforma-
tions (Scalar-noise and Scalar-shot noise) and geo-
metric transformations (noise, shot noise, rotation,
scale, local scale, sampling, holes, micro-holes, topol-
ogy and isometry). Five levels of strength are applied
to each transformation. Totally, 65 shapes are pro-
duced for each null shape, and there are 135 shapes in
the dataset. Since our method is designed to encode
the geometric information, the shapes with photomet-
ric transformations were not considered in this exper-
iment. Examples of all possible transformations are
shown in Fig. 4.
4.1.2 Evaluation Methodology
Experiments were conducted on this dataset to test
the repeatability of each feature detector. The per-
formance was quantitatively measured by compar-
ing the interest points detected on each transformed
shape M
T
i
and its corresponding null shape M
N
. For
a point v on a shape M, its local neighborhood within
geodesic radius r is defined as
N
r
(v) = {p ∈ M|gd(v, p) ≤ r}, (6)
where gd(v, p) represents the geodesic distance be-
tween v and p.
Suppose the ground-truth one-to-one correspon-
dence (M
N
= GT (M
T
i
)) is known as a prior, a point
v extracted from a transformed model M
T
i
is con-
sidered to be correctly detected if its corresponding
point GT (v) is located within the geodesic ball de-
fined by N
r
(v
0
), where v
0
is an interest point detected
on M
N
. Repeatability is calculated as the percentage
of correctly detected interest points. In this experi-
ment, we used the same setting as (Zaharescu et al.,
2012), where r was set to be 1% of the surface area.
We used the first 100 eigenvalues and eigenvectors of
the Laplace-Beltrami operator on each shape to com-
pute the heat kernel signature, and the time parame-
ter was set to 0.1. Five interest points with the high-
est prominence on two hands, feet and head were de-
tected, which were considered as representatives of
the human shape by our method. For a fair compari-
son, the results achieved by the MeshDOG approach
(Zaharescu et al., 2012) are also reported since this
method achieves a good performance in terms of re-
peatability on the PHOTOMESH dataset. The Mesh-
DOG interest point detector was implemented with
three different scalar fields defined over the mani-
folds, including color intensity, mean curvature and
Gaussian curvature.
Persistence-based Interest Point Detection for 3D Deformable Surface
63
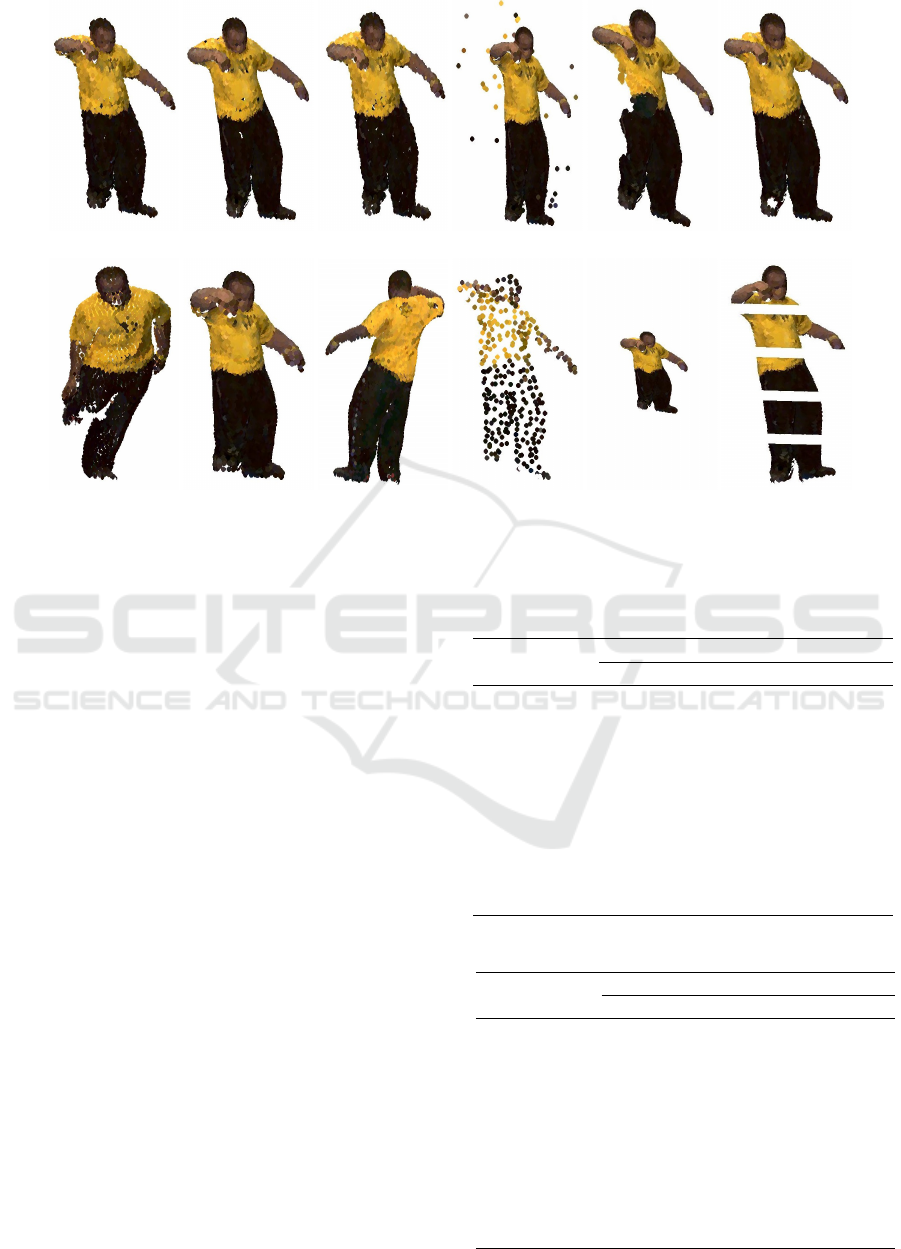
(a) (b) (c) (d) (e) (f)
(g) (h) (i) (j) (k) (l)
Figure 4: Examples of all possible transformations of a null shape on the PHOTOMESH dataset. (a) Scalar-noise (b) Scalar-
shot noise (c) Noise (d) Shot noise (e) Holes (f) Micro-holes (g) Isometry (h) Local scale (i) Rotation (j) Sampling (k) Scale
(l) Topology.
4.1.3 Results and Discussion
Comparative results on the repeatability of theses de-
tectors are presented in Tables 1-4.
In the cases of noise, shot noise and sampling, the
performance of MeshDOG is decreased as the level
of transformation increases, especially for the Mesh-
DOG detectors generated with geometric scalar fields
(i.e., mean curvature and Gaussian curvature). In con-
trast, our method achieves better results. The repeata-
bility achieved by our pHKS method remains to be
1 under all levels of noise, shot noise and sampling
transformations. This is because the scalar field used
in our method is more stable than the scalar field used
in MeshDOG.
For the transformations of rotation, scale, local
scale and isometry, both MeshDOG and pHKS in-
terest point detectors can successfully find the same
set of interest points. Those results clearly show that
MeshDOG and pHKS methods are invariant to rigid
and non-rigid transformations.
Both holes and micro holes transformations de-
crease the performance of MeshDOG linearly. In con-
trast, our method produces good results since the con-
structed scalar field is able to handle partial and in-
complete shapes. In some cases, our approach cannot
produce a full repeatability of 1.00 because several in-
terest points are missing due to the presence of holes.
Table 1: Repeatability of MeshDOG (photometric).
Strength
Transform. 1 < 2 < 3 < 4 < 5
Noise 1.00 1.00 1.00 0.99 0.99
Shot Noise 1.00 0.99 0.99 0.99 0.98
Rotation 1.00 1.00 1.00 1.00 1.00
Scale 1.00 1.00 1.00 1.00 1.00
Local Scale 1.00 1.00 0.99 0.99 0.99
Sampling 0.96 0.96 0.95 0.90 0.94
Holes 1.00 1.00 0.99 0.99 0.97
Micro-Holes 1.00 1.00 0.99 0.99 0.99
Topology 0.93 0.86 0.82 0.82 0.78
Isometry 0.95 0.97 0.97 0.93 0.96
Table 2: Repeatability of MeshDOG (mean curvature).
Strength
Transform. 1 < 2 < 3 < 4 < 5
Noise 0.96 0.93 0.91 0.90 0.89
Shot Noise 0.99 0.98 0.96 0.95 0.94
Rotation 1.00 1.00 1.00 1.00 1.00
Scale 1.00 1.00 1.00 1.00 1.00
Local Scale 0.99 0.98 0.97 0.96 0.96
Sampling 0.92 0.89 0.91 0.88 0.92
Holes 0.99 0.99 0.99 0.98 0.98
Micro-Holes 1.00 1.00 0.99 0.99 0.98
Topology 0.90 0.83 0.75 0.62 0.76
Isometry 0.95 0.96 0.94 0.94 0.93
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
64

(a) (b) (c) (d) (e) (f) (g)
Figure 5: An illustration of interest points detected by different algorithms on Armadillo from Interest Points Dataset B (a)
ground-truth points (b) Mesh saliency (c) Salient points (d) 3D-Harris (e) SD-corners (f) HKS (g) pHKS.
Table 3: Repeatability of MeshDOG (Gaussian curvature).
Strength
Transform. 1 < 2 < 3 < 4 < 5
Noise 0.97 0.93 0.87 0.83 0.79
Shot Noise 0.99 0.98 0.97 0.96 0.92
Rotation 1.00 1.00 1.00 1.00 1.00
Scale 1.00 1.00 1.00 1.00 1.00
Local Scale 0.98 0.98 0.97 0.96 0.95
Sampling 0.88 0.88 0.91 0.94 0.92
Holes 0.99 0.99 0.99 0.97 0.97
Micro-Holes 1.00 0.99 0.99 0.98 0.97
Topology 0.85 0.70 0.65 0.58 0.64
Isometry 0.95 0.96 0.95 0.92 0.93
Table 4: Repeatability of the proposed method (pHKS).
Strength
Transform. 1 < 2 < 3 < 4 < 5
Noise 1.00 1.00 1.00 1.00 1.00
Shot Noise 1.00 1.00 1.00 1.00 1.00
Rotation 1.00 1.00 1.00 1.00 1.00
Scale 1.00 1.00 1.00 1.00 1.00
Local Scale 1.00 1.00 1.00 1.00 1.00
Sampling 1.00 1.00 1.00 1.00 1.00
Holes 0.80 1.00 1.00 0.60 1.00
Micro-Holes 1.00 1.00 1.00 1.00 1.00
Topology 1.00 1.00 0.60 1.00 1.00
Isometry 1.00 1.00 1.00 1.00 1.00
In the presence of topological transformations, the
performance of MeshDOG is significantly decreased.
For example, the repeatability achieved by MeshDOG
with a Gaussian curvature is 0.85 under the first level
of topological transformation. Its repeatability is then
decreased to 0.64 under the fifth level of topological
transformation. In contrast, our approach achieves a
very high repeatability, as shown in Table 4. This
is mainly due to the definition of saliency of inter-
est point, which is not only a local maximum but also
has a large persistence, i.e., a strong contrast as com-
pared to its neighborhood in a connected topological
space. Therefore, although the whole shape is trans-
formed into several structures, the peaks remain the
same under our scalar field construction. The interest
points are successfully selected as long as their per-
sistences are not greatly changed. In some cases (e.g.,
with the third level of topological transformation), the
result is not satisfactory because the persistences of
some peaks are destroyed by the topological transfor-
mations.
4.2 Performance on the Interest Points
Dataset
4.2.1 Dataset
This dataset consists of two sub-datasets (dataset A
and B) (Dutagaci et al., 2012). It is reported that
the performance of existing algorithms is consistent
across the two datasets (Dutagaci et al., 2012), so only
dataset B is used in this paper as it is much larger. In
dataset B, there are 43 models manually marked by
16 humans. Ground-truth points are constructed from
the human-marked points based on two criteria: ra-
dius of an interest region σ and the number of users n
who marked a point within the radius. In addition to
the location, the prominence of a ground-truth point is
included as the number of humans who have marked
it within its local neighborhood. An example of in-
terest points detected on a model from dataset B are
shown in Fig. 5.
4.2.2 Evaluation Methodology
On this dataset, evaluation was performed to test the
compatibility of each algorithm with human percep-
tion. This experiment is designed to test an inter-
est point detector in terms of distinctiveness, which
demonstrates the ability of an interest point to de-
tect representative and characteristic points on a sur-
face. Our evaluation was performed on each single
instance of the model using human generated ground-
truth. Three measures are used as in (Dutagaci et al.,
2012), i.e., false positive errors (FPE), false negative
errors (FNE) and weighted miss error (WME). Let
G
M
(n,σ) be the set of ground-truth points on a model
M and D
M
be the set of interest points detected by an
Persistence-based Interest Point Detection for 3D Deformable Surface
65
(a) σ = 0.03 and n = 2
(b) σ = 0.03 and n = 8
(c) σ = 0.05 and n = 2
(d) σ = 0.05 and n = 8
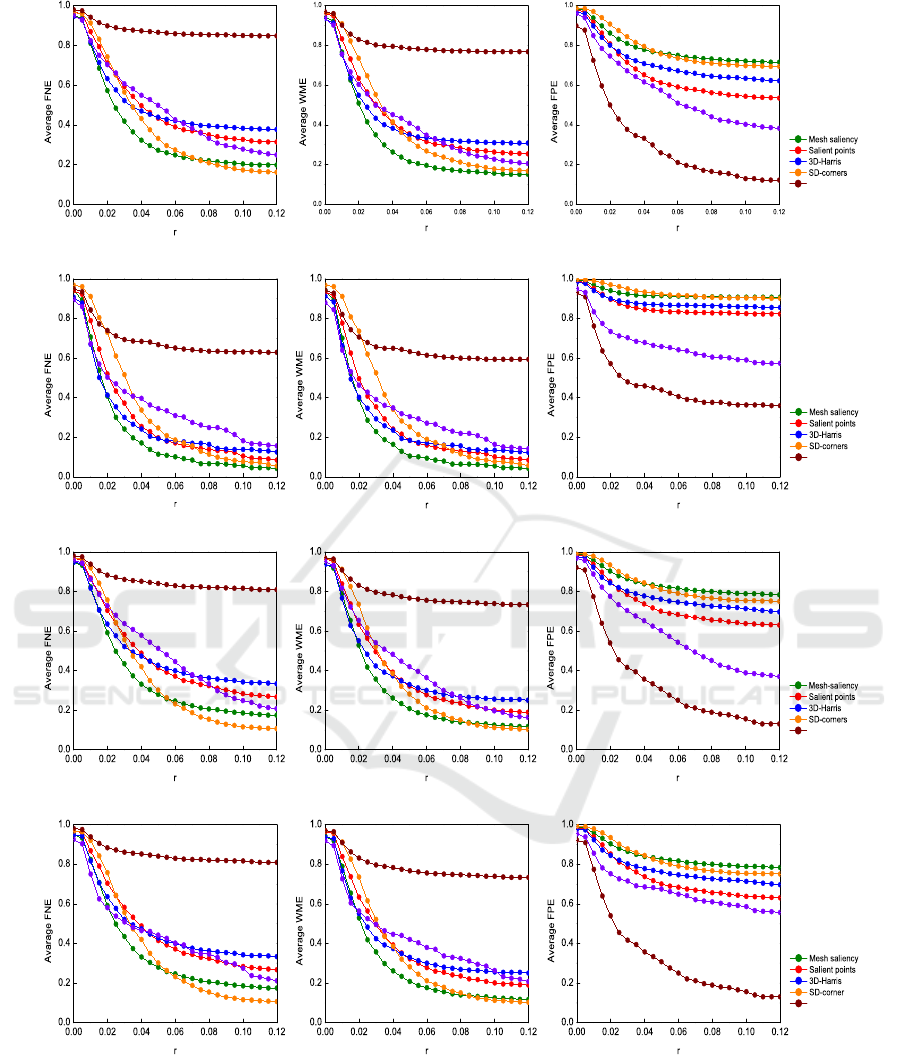
Figure 6: Performance on Dataset B (43 Models, 16 Subjects) of the Interest Points Dataset. False negative error (first
column), weighted miss error (second column), and false positive error (third column) are shown in the figure. The settings
for ground-truth generation are given under the plots, where r stands for the localization error tolerance.
algorithm. A point v is considered to be ‘correctly de-
tected’ if there is a detected point within the geodesic
ball N
r
(v), where the parameter r is the localization
error tolerance. Given the number of ground-truth
points N
GT
, the points detected by an algorithm N
D
and the correctly detected points N
C
, FNE, FPE and
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
66

W ME are defined as follows:
FNE(r) = 1 −
N
C
N
GT
, (7)
FPE(r) =
N
D
− N
C
N
D
, (8)
W ME(r) = 1 −
1
∑
N
GT
i=1
n
i
N
GT
∑
i=1
n
i
δ, (9)
where δ
i
is set to 1 if the ground-truth point is de-
tected. Otherwise, it is set to 0. n
i
is defined as the
prominence of an interest point v
i
, which is equal to
the number of humans voting for that point.
In this experiment, we used the first 100 eigenval-
ues and corresponding eigenvectors of the Laplace-
Beltrami operator to compute heat kernel signature
and its time parameter was set to 0.001. For compar-
ison, we present the results achieved by five state-of-
the-art methods including mesh saliency (Lee et al.,
2005), salient points (Godil and Wagan, 2011), 3D-
Harris (Pratikakis et al., 2010), SD-corners (Novat-
nack and Nishino, 2007) and HKS (Sun et al., 2009).
4.2.3 Results and Discussion
The comparative results are presented in Fig. 6. It can
be seen from the results that mesh saliency, salient
points, 3D-Harris, SD-corners and HKS are able to
achieve low FNE and WME measures at the cost of
a high FPE. Particularly, when σ = 0.03 and n = 8,
these methods can find almost 80% of the ground-
truth points. However, 90% of their detected points
are false. In contrast, the average FNE and WME
measures achieved by HKS are extremely high, which
means that a large percentage of the ground-truth in-
terest points are not detected by the HKS method. On
the other hand, HKS performs the best on FPE. For
example, when σ = 0.05 and n = 2, the FNE and
WME scores of HKS are about 0.8, and the average
FPE is as low as 0.2. This is because HKS tends to
select the extremities of the models, which are often
of great interest to humans.
Our approach produces an overall good perfor-
mance as a trade-off is achieved between FNE, FPE
and WME. As the localization error tolerance r in-
creases, our proposed pHKS can detect about 80%
of the whole ground-truth points with far less false
positives as compared to the other methods. This
means that the set of points detected by pHKS is more
concise and effective. This result corresponds to the
fact that humans usually mark interest points corre-
sponding to extremities of 3D shapes (Dutagaci et al.,
2012). Although the points detected by HKS usually
have high prominence, the number of detected inter-
est points is too limited. That is because HKS selects
points with large values and as local maxima, and the
scale of points has to be predefined (Sun et al., 2009).
Our pHKS method is able to detect more points, be-
cause we select interest points with a strong contrast
to their neighborhood and the scale of the neighbor-
hood is adaptively determined using topological data
analysis.
5 CONCLUSION
In this paper, we present a method for interest point
detection on 3D non-rigid shapes using topological
persistence. Our approach simultaneously captures
the local geometric and global structural information
of the surface. It extracts interest points with a high
repeatability and a strong distinctiveness. Our exper-
iments on two public datasets have clearly demon-
strated the effectiveness of our approach. In the fu-
ture, we will combine our interest point detector with
a local surface descriptor and test it on applications
such as surface registration, shape tracking and shape
retrieval of non-rigid objects.
ACKNOWLEDGEMENTS
This research is supported by a China Scholarship
Council (CSC) scholarship (No. 201406070059),
Australian Research Council grants (DE120102960,
DP150100294 and DP150104251), the National Nat-
ural Science Foundation of China (Nos. 61602499
and 61471371) and the Innovative Postdoctoral Tal-
ent Program of China (No. 182707).
REFERENCES
Aubry, M., Schlickewei, U., and Cremers, D. (2011). The
wave kernel signature: A quantum mechanical ap-
proach to shape analysis. In Computer Vision Work-
shops (ICCV Workshops), 2011 IEEE International
Conference on, pages 1626–1633. IEEE.
Bauer, U., Kerber, M., and Reininghaus, J. (2014). Dis-
tributed computation of persistent homology. In Pro-
ceedings of the Meeting on Algorithm Engineering
& Expermiments, pages 31–38. Society for Industrial
and Applied Mathematics.
Biasotti, S., Cerri, A., Bronstein, A., and Bronstein, M.
(2015). Recent trends, applications, and perspec-
tives in 3d shape similarity assessment. In Computer
Graphics Forum. Wiley Online Library.
Bronstein, A. M., Bronstein, M. M., Guibas, L. J., and Ovs-
janikov, M. (2011). Shape google: Geometric words
Persistence-based Interest Point Detection for 3D Deformable Surface
67

and expressions for invariant shape retrieval. ACM
Transactions on Graphics (TOG), 30(1):1.
Carri
`
ere, M., Oudot, S. Y., and Ovsjanikov, M. (2015). Sta-
ble topological signatures for points on 3d shapes. In
Computer Graphics Forum, volume 34, pages 1–12.
Wiley Online Library.
Chazal, F., Cohen-Steiner, D., Glisse, M., Guibas, L. J., and
Oudot, S. Y. (2009). Proximity of persistence modules
and their diagrams. In Proceedings of the twenty-fifth
annual symposium on Computational geometry, pages
237–246. ACM.
Chazal, F., Guibas, L. J., Oudot, S. Y., and Skraba, P.
(2013). Persistence-based clustering in riemannian
manifolds. Journal of the ACM (JACM), 60(6):41.
Cormen, T. H. (2009). Introduction to algorithms. MIT
press.
Dey, T. K., Li, K., Luo, C., Ranjan, P., Safa, I., and Wang,
Y. (2010). Persistent heat signature for pose-oblivious
matching of incomplete models. In Computer Graph-
ics Forum, volume 29, pages 1545–1554. Wiley On-
line Library.
Dutagaci, H., Cheung, C. P., and Godil, A. (2012). Eval-
uation of 3d interest point detection techniques via
human-generated ground truth. The Visual Computer,
28(9):901–917.
Edelsbrunner, H. and Harer, J. (2010). Computational
topology: an introduction. American Mathematical
Soc.
Ganapathi-Subramanian, V., Thibert, B., Ovsjanikov, M.,
and Guibas, L. (2016). Stable region correspondences
between non-isometric shapes.
Garro, V. and Giachetti, A. (2016). Scale space graph rep-
resentation and kernel matching for non rigid and tex-
tured 3d shape retrieval. IEEE transactions on pattern
analysis and machine intelligence, 38(6):1258–1271.
Gbal, K., Bærentzen, J. A., Aanæs, H., and Larsen, R.
(2009). Shape analysis using the auto diffusion func-
tion. In Computer Graphics Forum, volume 28, pages
1405–1413. Wiley Online Library.
Godil, A. and Wagan, A. I. (2011). Salient local 3d features
for 3d shape retrieval. In IS&T/SPIE Electronic Imag-
ing, pages 78640S–78640S. International Society for
Optics and Photonics.
Guo, Y., Bennamoun, M., Sohel, F., Lu, M., and Wan, J.
(2014a). 3d object recognition in cluttered scenes
with local surface features: a survey. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
36(11):2270–2287.
Guo, Y., Bennamoun, M., Sohel, F., Lu, M., Wan, J., and
Kwok, N. M. (2016). A comprehensive performance
evaluation of 3d local feature descriptors. Interna-
tional Journal of Computer Vision, 116(1):66–89.
Guo, Y., Bennamoun, M., Sohel, F. A., Wan, J., and Lu,
M. (2013a). 3d free form object recognition using ro-
tational projection statistics. In Applications of Com-
puter Vision (WACV), 2013 IEEE Workshop on, pages
1–8. IEEE.
Guo, Y., Sohel, F., Bennamoun, M., Lu, M., and Wan, J.
(2013b). Rotational projection statistics for 3d local
surface description and object recognition. Int J Com-
put Vision, 105(1):63–86.
Guo, Y., Sohel, F., Bennamoun, M., Wan, J., and Lu, M.
(2014b). An accurate and robust range image registra-
tion algorithm for 3d object modeling. IEEE Transac-
tions on Multimedia, 16(5):1377–1390.
Guo, Y., Sohel, F. A., Bennamoun, M., Lu, M., and Wan,
J. (2013c). Trisi: A distinctive local surface de-
scriptor for 3d modeling and object recognition. In
GRAPP/IVAPP, pages 86–93.
Guo, Y., Sohel, F. A., Bennamoun, M., Wan, J., and Lu,
M. (2013d). Rops: A local feature descriptor for 3d
rigid objects based on rotational projection statistics.
In Communications, Signal Processing, and their Ap-
plications (ICCSPA), 2013 1st International Confer-
ence on, pages 1–6. IEEE.
Harris, C. and Stephens, M. (1988). A combined corner and
edge detector. In Alvey vision conference, volume 15,
page 50. Citeseer.
Lee, C. H., Varshney, A., and Jacobs, D. W. (2005). Mesh
saliency. In ACM transactions on graphics (TOG),
volume 24, pages 659–666. ACM.
Li, C., Ovsjanikov, M., and Chazal, F. (2014). Persistence-
based structural recognition. In The IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
Litman, R. and Bronstein, A. M. (2014). Learning spec-
tral descriptors for deformable shape correspondence.
IEEE transactions on pattern analysis and machine
intelligence, 36(1):171–180.
Liu, X., Liu, L., Song, W., Liu, Y., and Ma, L. (2016). Shape
context based mesh saliency detection and its applica-
tions: A survey. Computers & Graphics, 57:12–30.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International journal of computer
vision, 60(2):91–110.
Mian, A., Bennamoun, M., and Owens, R. (2010). On the
repeatability and quality of keypoints for local feature-
based 3d object retrieval from cluttered scenes. In-
ternational Journal of Computer Vision, 89(2-3):348–
361.
Novatnack, J. and Nishino, K. (2007). Scale-dependent 3d
geometric features. In 2007 IEEE 11th International
Conference on Computer Vision, pages 1–8. IEEE.
Ovsjanikov, M., M
´
erigot, Q., M
´
emoli, F., and Guibas, L.
(2010). One point isometric matching with the heat
kernel. In Computer Graphics Forum, volume 29,
pages 1555–1564. Wiley Online Library.
Pratikakis, I., Spagnuolo, M., Theoharis, T., and Veltkamp,
R. (2010). A robust 3d interest points detector based
on harris operator. In Eurographics workshop on 3D
object retrieval, volume 5. Citeseer.
Reuter, M., Wolter, F.-E., and Peinecke, N. (2006).
Laplace–beltrami spectra as shape-dnaof surfaces and
solids. Computer-Aided Design, 38(4):342–366.
Sipiran, I. and Bustos, B. (2011). Harris 3d: a robust exten-
sion of the harris operator for interest point detection
on 3d meshes. The Visual Computer, 27(11):963–976.
Sipiran, I. and Bustos, B. (2013). A fully hierarchical
approach for finding correspondences in non-rigid
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
68

shapes. In Proceedings of the IEEE International
Conference on Computer Vision, pages 817–824.
Skraba, P., Ovsjanikov, M., Chazal, F., and Guibas,
L. (2010). Persistence-based segmentation of de-
formable shapes. In 2010 IEEE Computer So-
ciety Conference on Computer Vision and Pattern
Recognition-Workshops, pages 45–52. IEEE.
Sun, J., Ovsjanikov, M., and Guibas, L. (2009). A concise
and provably informative multi-scale signature based
on heat diffusion. In Computer graphics forum, vol-
ume 28, pages 1383–1392. Wiley Online Library.
Tombari, F., Salti, S., and Di Stefano, L. (2013). Perfor-
mance evaluation of 3d keypoint detectors. Interna-
tional Journal of Computer Vision, 102(1-3):198–220.
Wang, X., Sohel, F., Bennamoun, M., and Lei, H. (2015).
Binary descriptor based on heat diffusion for non-rigid
shape analysis. In Pacific-Rim Symposium on Image
and Video Technology, pages 751–761. Springer.
Wang, X., Sohel, F., Bennamoun, M., and Lei, H. (2016).
Heat propagation contours for 3d non-rigid shape
analysis. In 2016 IEEE Winter Conference on Appli-
cations of Computer Vision (WACV), pages 1–7. IEEE.
Xie, J., Wang, M., and Fang, Y. (2016). Learned bi-
nary spectral shape descriptor for 3d shape corre-
spondence. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
3309–3317.
Zaharescu, A., Boyer, E., and Horaud, R. (2012). Key-
points and local descriptors of scalar functions on 2d
manifolds. International Journal of Computer Vision,
100(1):78–98.
Persistence-based Interest Point Detection for 3D Deformable Surface
69
