
Comparing Repair-Task-Allocation Strategies in MAS
Hisashi Hayashi
System Engineering Laboratory, Corporate Research & Development Center, Toshiba Corporation,
1 Komukai-Toshiba-cho, Saiwai-ku, Kawasaki, 212-8582, Japan
Keywords: Multi-Agent Systems, Coordination Mechanism, Distributed Task Allocation, Emergency Repair.
Abstract: Many distributed systems can be regarded as multi-agent systems (MASs) where some agents are connected
to a network but located in different places. We consider severe situations where many causes of future agent
failures in MASs are found simultaneously and consecutively owing to large-scale disasters. If a cause of
future agent failure is not removed within a limited time, there is a high possibility that one of the agents will
stop working. In order to find effective strategies that reduce the number of actual agent failures, we compare
some repair-task-allocation strategies for MASs where sensing agents find causes of future agent failures and
manager agents communicate with one another to allocate repair tasks to action-execution agents.
1 INTRODUCTION
In many multi-agent systems (MASs), even if an
agent stops working, most of the other agents
continue to work and cover the task of the disabled
agent unless some important agents break down.
Normally, relatively few causes of future agent
failures are found simultaneously and it is not
difficult to remove them before some agents actually
fail. However, in the event of large-scale disasters,
many causes of future agent failures are found
simultaneously and consecutively, in which case, the
whole MAS will stop functioning if they are not fixed
efficiently using limited resources. Therefore, it is
important to effectively allocate the resources
necessary to repair them.
In this paper, we consider some scenarios where
disaster events repeatedly occur, which create causes
of future agent failures simultaneously and
consecutively. In such scenarios, we compare some
repair-task-allocation algorithms for MASs to find a
way of reducing the number of damaged agents so
that the MAS continues to function as a whole.
Although some fundamental repair-task-allocation
algorithms are compared in (Beaumont and Chaib-
draa 2007), the maximum number of causes of future
agent failures in their test scenarios is 10. On the other
hand, in our disaster scenarios, we consider much
more severe situations where the maximum number
is of the order of hundreds. As discussed in Section 6,
this difference leads to completely different
conclusions. Although cooperation between agents
was ineffective for reducing the number of failures in
the test scenarios of (Beaumont and Chaib-draa 2007),
we predict that cooperation is vital for allocation of
limited resources within a limited time when many
causes of future agent failures are created
simultaneously and consecutively owing to large-
scale disasters.
As discussed in (Choi, Brunet, and How 2009;
Macarthur et al. 2011; Rahimzadeh, Khanli, and
Mahan 2015), task-distribution algorithms are
roughly divided into two kinds of algorithms:
centralized algorithms and distributed algorithms. In
centralized algorithms, a single manager agent
collects information from its child agents and
allocates tasks to them. On the other hand, in
distributed algorithms, multiple manager agents
communicate with one another to allocate the tasks to
their child agents. Many existing task-allocation
algorithms are centralized algorithms. However,
distributed task-allocation algorithms are attracting
attention because they are expected to be fault-
tolerant: the breakdown of one manager agent does
not mean the total failure of the MAS. One of our
aims is to compare these two kinds of algorithms in
the repair-task-allocation scenarios. Because
execution of a repair action sometimes fails, it is
natural to replan and reallocate the repair task. We
also evaluate centralized and distributed repair-task-
allocation algorithms that include replanning
capabilities.
Hayashi H.
Comparing Repair-Task-Allocation Strategies in MAS.
DOI: 10.5220/0006094800170027
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 17-27
ISBN: 978-989-758-219-6
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
17

There is more related work on task allocation. In
(Rahimzadeh, Khanli, and Mahan 2015), the
probabilities of future agent failures are considered
when allocating tasks to agents. However, the
algorithm does not consider repairing. In (Guessoum
et al. 2010), some backup agents are created in case
of emergency. However, as pointed out in
(Rahimzadeh, Khanli, and Mahan 2015), the cost of
backup agents is high when additional hardware is
needed and it takes time to copy the agents
dynamically. The algorithm does not consider
repairing either. In (Okimoto et al. 2015), considering
future agents’ failure, robust agent teams are created.
The idea is to prepare more agents than needed. Again,
the cost is high and repairing is not considered.
Coallition formation of first responders in disaster
relief is also researched in (Ramchurn et al. 2010).
Applications of multi-agent task allocation range
from disaster relief (Chapman et al. 2009; dos Santos
and Bazzan 2011; Nair et al. 2002; Pujol-Gonzalez
2015; Ramchurn et al. 2010; Ramchurn et al. 2016;
Suárez, Quintero, de la Rosa, 2007), computer games
(Dawe 2013; Straatman et al. 2013), and coordination
of robots (Mi et al. 2014; Vallejo et al. 2009) to
command and control for combat ships (Beaumont
and Chaib-draa 2004; Beaumont and Chaib-draa
2007; Brown and Lane 2000; Brown et al. 2001;
Young 2005). Our repair-task-allocation is closely
related to the task allocation problems of combat
ships and disaster relief where tasks with hard
deadlines such as threat removal and civilian rescue
are allocated to teams.
This paper is organized as follows. In Section 2,
we define the MAS architecture for repair-task
allocations. In Section 3, we define five algorithms
for task repairing. In Section 4, we explain the
detailed settings for simulation. In Section 5, we show
the simulation results. In Section 6, we discuss the
simulation results, comparing them with the
simulation results reported in (Beaumont and Chaib-
draa 2007). Section 7 is devoted to the conclusion.
2 MAS ARCHITECTURE FOR
REPAIR-TASK ALLOCATIONS
We consider a MAS for repair-task allocations that is
composed of multiple unit MASs including sensing
agents, action-execution agents, and a manager agent:
sensing agents detect causes of future agent failures,
action-execution agents fix causes of future agent
failures using limited resources, and manager agents
communicate with one another to allocate repair tasks
to action-execution agents. In this section, we define
unit MASs and the agents that belong to unit MASs.
We define the functions of unit MASs as agents
because each function is often deployed on different
hardware and becomes out of order independently.
As shown in Figure 1, a unit MAS is a MAS
comprising 0 or more sensing agents, 0 or more
action-execution agents, and 1 manager agent.
When a sensing agent senses a cause of a future agent
failure, it reports the information to the manager agent
in the same unit MAS. When receiving the
information of a cause of a future agent failure, the
manager agent allocates the repair task to an action-
execution agent that belongs to the same unit MAS or
allocates the repair task to the manager agent of
another unit MAS if there are multiple unit MASs and
their manager agents are connected by the network.
When allocated a repair task, the action-execution
agent will execute a repair action consuming one
resource. Execution of a repair action will succeed or
fail according to the predefined probability. Unless a
cause of a future agent failure is removed by a repair
action, one of the agents will stop functioning
according to the predefined probability.
When a unit MAS has sensing agents and action-
execution agents, the unit MAS can sense and remove
causes of future agent failures without the help of the
other unit MASs as shown in Figure 1. In this case,
each unit MAS is independent and it is unnecessary
to connect each unit MAS through the network.
Because of its simplicity, the repair-task-allocation
algorithm for independent unit MASs will be
compared with other algorithms as a baseline
algorithm.
Figure 1: A unit MAS.
As shown in Figure 2, when the manager agents
of unit MASs are connected by the network, sensing
and repairing can be done in different unit MASs. We
expect that repair-task allocations will be more
effective when the manager agents are connected.
When the MAS has a centralized architecture, as
shown in Figure 3, only one manager agent (top
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
18
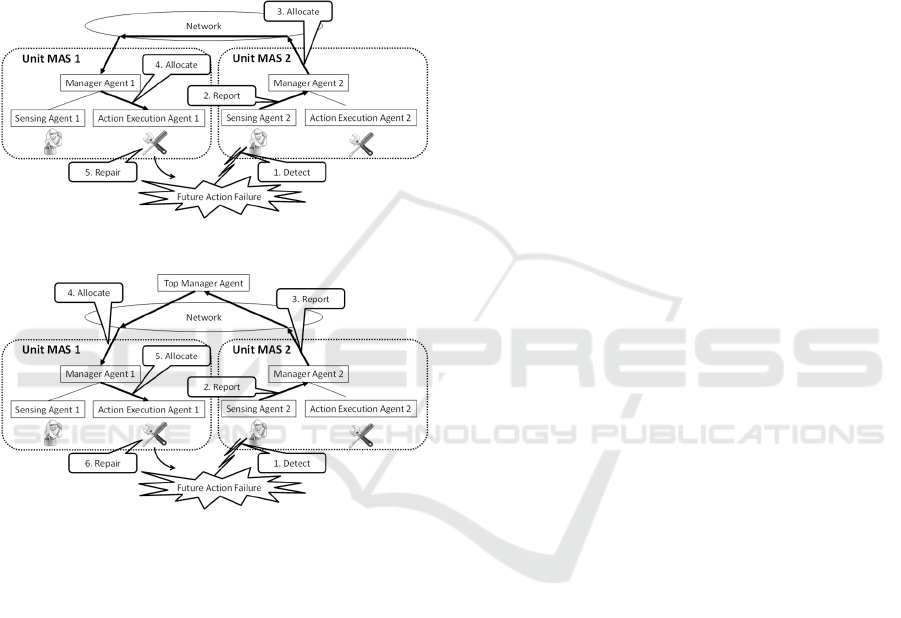
manager agent) works as a leader and allocates all
the repair tasks to unit MASs. On the other hand,
when the MAS has a distributed architecture as
shown in Figure 2, different manager agents become
leaders of task allocation for different repair tasks.
We expect that the distributed MAS algorithm is
more robust than the centralized algorithm because in
the distributed architecture, even if a leader becomes
out of order, another manager agent becomes a leader.
We will compare the repair-task-allocation
algorithms that use these MAS architectures.
Figure 2: Distributed architecture.
Figure 3: Centralized architecture.
3 ALGORITHMS
In this section, we introduce five algorithms for
repair-task allocations: the independent unit MAS
algorithm (baseline algorithm), the centralized
algorithm, the distributed algorithm, the centralized
algorithm with replanning, and the distributed
algorithm with replanning. In order to make these
algorithms for repair-task-allocations, we use well-
known techniques.
In the independent unit MAS algorithm, the
manager agent of each unit MAS decides which
repair action to execute without exchanging
information with other unit MASs. In the centralized
algorithm, only one manager agent (top manager
agent) works as a leader and allocates repair tasks to
unit MASs. In the distributed algorithm, when a
sensing agent detects a cause of a future agent failure,
the manager agent in the same unit MAS works as a
leader and selects a unit MAS for the repair-task.
Note that different manager agents become leaders
for different repair tasks in the distributed algorithm.
In the centralized algorithm with replanning, only the
top manager agent reallocates unsuccessful repair
tasks to unit MASs. On the other hand, in the
distributed algorithm with replanning, when an
action-execution agent fails to execute a repair action,
the manager agent in the same unit MAS works as a
leader and reallocates the unsuccessful repair task to
a unit MAS.
We expect that the centralized algorithm and the
distributed algorithm can allocate repair tasks more
effectively than the independent unit MAS algorithm
because unit MASs communicate with one another.
We also expect that the distributed algorithm is more
robust than the centralized algorithm that is weak
with respect to the failure of the top manager agent.
We also evaluate the centralized algorithm with
replanning and the distributed algorithm with
replanning because it is natural and effective to
reallocate the repair task when the repair task is not
completed successfully.
3.1 Independent Unit MAS Algorithm
In the independent unit MAS algorithm, the manager
agents of different unit MASs do not communicate
with one another. Therefore, as in Figure 1, when a
sensing agent senses a cause of a future agent failure,
the action-execution agent in the same unit MAS tries
to repair it without the help of the other unit MASs.
Although this algorithm does not require network
connections among unit MASs, multiple action-
execution agents in different unit MASs might try to
execute repair actions for the same cause of a future
agent failure, which leads to unnecessary
consumption of resources.
Algorithm 1 (Independent Unit MAS Algorithm)
The sensing agents, the manager agent and the
action-execution agents in each unit MAS work as
follows if they are alive:
Algorithm of Sensing Agents
1. When a sensing agent detects a new cause of a
future agent failure, it reports the information to
the manager agent in the same unit MAS if the
manager agent is alive.
Algorithm of Manager Agents
1. When the manager agent M receives the
information of a new cause of a future agent
failure C from a sensing agent in the same unit
Comparing Repair-Task-Allocation Strategies in MAS
19

MAS, the manager agent M selects and reserves
an action-execution agent E for the repair task
R of C, if E exists, such that E is alive, the
number of resources of E is more than 0 and E
is not reserved for another cause of a future
agent failure.
2. When it becomes possible for the reserved
action-execution agent E to start executing the
repair action A for the reserved repair task R, if
E is alive, the manager agent M in the same unit
MAS orders E to execute A and erases the
reservation information.
Algorithm of Action-Execution Agents
1. When receiving an execution order of the repair
action A, the action-execution agent E executes
A, decrements 1 resource whether the result of
A is a success or a failure, and reports the result
to its manager agent.
3.2 Centralized Algorithm
A centralized algorithm is often used for task
allocations in general. In the centralized algorithm, as
shown in Figure 3, only one manager agent (top
manager agent) allocates repair tasks to the manager
agents of unit MASs based on the contract net
protocol (Smith 1980), which is a kind of auction.
Although there are many criteria to select a unit MAS,
we select the unit MAS that can start repairing first.
Because of the network connection, we expect that
the centralized algorithm is more effective than the
independent unit MAS algorithm.
Algorithm 2 (Centralized Algorithm) The sensing
agents, the manager agent and the action-execution
agents in each unit MAS work as follows if they are
alive:
Algorithm of Sensing Agents
Same as the algorithm of sensing agents in
Algorithm 1.
Algorithm of Manager Agents
1. When the manager agent M receives the
information of a new cause of a future agent
failure C from a sensing agent in the same unit
MAS, the manager agent M forwards the
information of C to the top manager agent T if T
is alive. Otherwise, it works in the same way as
the first step of the algorithm of manager agents
in Algorithm 1.
2. When the manager agent M receives an
allocation of a repair task R from the top
manager agent, M selects and reserves an
action-execution agent E for R in the same way
as the first step of the algorithm of manager
agents in Algorithm 1.
3. Same as the second step of the algorithm of
manager agents in Algorithm 1.
Algorithm of the Top Manager Agent
1. When the top manager agent T receives the
information of a new cause of a future agent
failure C from a manager agent, T asks each
alive manager agent M whether the unit MAS U
of M can be in charge of the repair task R of C
and how quickly an action-execution agent of U
can start the repair action of R. Then, T
allocates R to the manager agent of the unit
MAS U2 such that an action-execution agent of
U2 can start the repair action of R the quickest.
Algorithm of Action-Execution Agents
Same as the algorithm of action-execution
agents in Algorithm 1.
3.3 Distributed Algorithm
In the distributed algorithm, as shown in Figure 2,
when a sensing agent detects a cause of a future agent
failure, the manager agent in the same unit MAS
works as a leader like the top manager agent of the
centralized algorithm, selects a unit MAS based on
the contract net protocol (Smith 1980), and allocates
the repair-task to the manager agent of the selected
unit MAS. However, unlike the centralized algorithm,
different manager agents become leaders for different
repair tasks. Therefore, the distributed algorithm is
expected to be more robust for agent failures than the
centralized algorithm.
Algorithm 3 (Distributed Algorithm) The sensing
agents, the manager agent and the action-execution
agents in each unit MAS work as follows if they are
alive:
Algorithm of Sensing Agents
Same as the algorithm of sensing agents in
Algorithm 1.
Algorithm of Manager Agents
1. When the manager agent M receives the
information of a new cause of a future agent
failure C from a sensing agent in the same unit
MAS, M asks each alive manager agent, selects
a unit MAS U and allocates the repair task of C
to the manager agent of the unit MAS U in the
same way as the first step of the algorithm of the
top manager agent in Algorithm 2.
2. When the manager agent M receives an
allocation of a repair task R from the manager
agent of another unit MAS, M selects and
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
20

reserves an action-execution agent E for R in the
same way as the first step of the algorithm of
manager agents in Algorithm 1.
3. Same as the second step of the algorithm of
manager agents in Algorithm 1.
Algorithm of Action-Execution Agents
Same as the algorithm of action-execution agents
in Algorithm 1.
3.4 Centralized Algorithm with
Replanning
In the centralized algorithm with replanning, when
execution of a repair action results in failure, the top
manager agent reselects a unit MAS and reallocates
the repair task to the manager agent of the selected
unit MAS. Because the success rate of repair actions
is not 100%, it is expected that replanning will
decrease the number of agent failures.
Algorithm 4 (Centralized Algorithm with
Replanning) The sensing agents, the manager agent
and the action-execution agents in each unit MAS
work as follows if they are alive:
Algorithm of Sensing Agents
Same as the algorithm of sensing agents in
Algorithm 1.
Algorithm of Manager Agents
1. Same as the first step of the algorithm of
manager agents in Algorithm 2.
2. Same as the second step of the algorithm of
manager agents in Algorithm 2.
3. Same as the third step of the algorithm of
manager agents in Algorithm 2.
4. When the manager agent M receives the result of
repair-action execution for the repair task R
from an action-execution agent in the same unit
MAS, if the result is a failure, M reports the
result of R as a failure to the top manager agent.
Algorithm of the Top Manager Agent
1. Same way as the first step of the algorithm of the
top manager agent in Algorithm 2.
2. When the top manager agent T receives the result
of a failure for the repair task R from a manager
agent, T asks each alive manager agent, selects
a unit MAS U, and reallocates R to one of the
manager agents in the same way as the first step
of the algorithm of the top manager agent in
Algorithm 2.
Algorithm of Action-Execution Agents
Same as the algorithm of action-execution
agents in Algorithm 1.
3.5 Distributed Algorithm with
Replanning
In the distributed algorithm with replanning, when an
action-execution agent fails to execute a repair action,
the manager agent in the same unit MAS reselects a
unit MAS and reallocates the task to the manager
agent of the selected unit MAS. It is expected that
replanning will decrease the number of agent failures.
Algorithm 5 (Distributed Algorithm with
Replanning) The sensing agents, the manager agent
and the action-execution agents in each unit MAS
work as follows if they are alive:
Algorithm of Sensing Agents
Same as the algorithm of sensing agents in
Algorithm 1.
Algorithm of Manager Agents
1. Same as the first step of the algorithm of
manager agents in Algorithm 3.
2. Same as the second step of the algorithm of
manager agents in Algorithm 3.
3. Same as the third step of the algorithm of
manager agents in Algorithm 3.
4. When the manager agent M receives the
result of repair-action execution for the
repair task R from an action-execution
agent in the same unit MAS, if the result is a
failure, this manager agent M reallocates R
to one of the manager agents in the same
way as the first step of the algorithm of
manager agents in Algorithm 3.
Algorithm of Action-Execution Agents
Same as the algorithm of action-execution
agents in Algorithm 1.
4 SIMULATION SETTINGS
In this section, we explain the details of simulation
settings used to compare and evaluate the algorithms
defined in the previous section. We set typical values
of unit MASs, considering our target application that
is closely related to the application of (Beaumont and
Chaib-draa 2007). In 4.1, we show the number of
agents and resources in unit MASs. In 4.2, we show
the performances of sensing and repairing of each
unit MAS. In 4.3, we show the consecutive
occurrence patterns of disaster events that create
multiple causes of future agent failures
simultaneously. As stressed in the introductory
section, we predict that cooperation among agents
becomes very effective in these severe occurrence
Comparing Repair-Task-Allocation Strategies in MAS
21
patterns of disaster events, which is completely
different from the result of (Beaumont and Chaib-
draa 2007) where the numbers of causes of future
agent failures in their test scenarios are small.
4.1 Numbers of Agents and Resources
in Unit MASs
As shown in Table 1, we use 7 kinds of unit MASs:
UMAS 0, …, UMAS 6, which are typical unit MASs
of our target application. The numbers of UMAS 0,
…, UMAS 6 are 1, 1, 2, 2, 4, 8, 8. The total number
of these unit MASs is 26 (=1+1+2+2+4+8+8). Each
UMAS has exactly one manager agent and the total
number of manager agents is 26. Each UMAS has
exactly one sensing agent except UMAS 0 and the
total number of sensing agents is 25.
Table 1: The number of unit MASs, agents, and resources.
Unit MAS Type
# of Deployed Unit MASs
# of Manager Agents
# of Sensing Agents
# of Action-Execution
Agents
# of Initial Resources of
Each Action-Execution
Agent
UMAS 0 1 1 0 0 -
UMAS 1 1 1 1 0 -
UMAS 2 2 1 1 0 -
UMAS 3 2 1 1 4 18
UMAS 4 4 1 1 2 12
UMAS 5 8 1 1 1 24
UMAS 6 8 1 1 1 3
Because high-performance unit MASs are costly
in general, considering the balance, we use a smaller
number of high-performance unit MASs and a larger
number of low-performance unit MASs. We introdu-
ce the performance of each unit MAS in the next
subsection. Although we conducted simulations for
different numbers of these unit MASs, we observed
similar simulation results and we do not show them
in this paper. Note that the aim of this paper is to find
when each algorithm is more effective than others.
Simulation under different combinations of unit
MASs was not helpful for this purpose.
The numbers of action-execution agents in
UMAS 0, …, UMAS 6 are 0, 0, 0, 4, 2, 1, 1. The total
number of action-execution agents is 32
(=2*4+4*2+8*1+8*1). An action-execution agent
cannot execute more than one repair action in parallel
but multiple action-execution agents can execute
repair actions at the same time. The numbers of initial
resources that each action-execution agent in UMAS
3, …, UMAS 6 has are 18, 12, 24, 3. The total number
of initial resources is 456
(=2*4*18+4*2*12+8*1*24+8*1*3).
UMAS 1 and UMAS 2 do not have action-
execution agents, which means that the causes of
agent failures found by the sensing agent of UMAS 1
or UMAS 2 need to be repaired by the action
execution agents of UMAS 3, …, UMAS 6. UMAS 0
does not have sensing agents or action-execution
agents. It has only one manager agent that works as
the top manager agent when using the centralized
algorithm or the centralized algorithm with
replanning.
4.2 Performance of Sensing and
Repairing
Table 2 shows performances of unit MASs in terms
of sensing and repairing. We set the typical
performances of each unit MAS considering a
specific application. Sensing agents in UMAS 1, …,
UMAS 6 can start detecting causes of agent failure
respectively from 360, 180, 72, 43.2, 18, 18 seconds
before the expected time of agent’s breakdown. The
sooner the sensing agent detects a cause of a future
agent failure, the higher the performance is, which
means that performance of the sensing agent in
UMAS 1 is the best. The probability of detecting
causes of future agent failures is 90%.
Action-execution agents in UMAS 3, …, UMAS
6 can start repairing from 36, 18, 10.8, 10.8 seconds
before the expected time of an agent failure. The
sooner the action-execution agent can start repairing,
the higher the performance is, which means that
performance of the action-execution agent in UMAS
3 is the best. The success probability of repairing is
80%. When an action-execution agent starts repairing
x seconds before the expected time of agent’s
breakdown, the time of repairing will be x/2.5
seconds. We assume a situation where a cause of
agent failure approaches the target agent at constant
speed and the action-execution agent sends the
resource for a repair to the cause of future agent
failure at constant speed.
Table 2: The performance of sensing and repairing.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
22

Unit MAS Type
Performance
of Sensing
Performance of
Repairing
Time (secs) to Start Detecting
a Cause before an Agent Failure
Prob. of Detecting Causes of
Future Agent Failures (%)
Time (secs) to Start Repairing
before an Agent Failure
Time for Repairing (secs)
when Starting the Repair
x secs before an Agent Failure
Success Prob. of Repairs (%)
UMAS 1 360 90 - - -
UMAS 2 180 90 - - -
UMAS 3 72 90 36 x/2.5 80
UMAS 4 43.2 90 18 x/2.5 80
UMAS 5 18 90 10.8 x/2.5 80
UMAS 6 18 90 10.8 x/2.5 80
4.3 Occurrence Patterns of Disasters
Table 3 summarizes the occurrence patterns of
disaster events and causes of future agent failures. In
our simulation scenarios, when a disaster event
occurs, a cause of a future agent failure is created
every second. The total number of causes of future
agent failures created by a disaster event is 30.
Disaster events repeatedly happen 10 times, and the
interval between disaster events is 1 hour. Note that
the number of action-execution agents is 32, which is
also the maximum number of the repair actions that
can be executed in parallel. This number is closer to
the number of causes of future agent failures created
by a disaster event. Therefore, the repairing capability
of the MAS is close to the limitation.
As summarized in Table 4, we use two different
selection rules of agents: the random selection rule of
agents and the concentrated selection rule of agents.
When the random selection rule of agents is applied,
if a cause of a future agent failure is not removed by
a repair action, one of the agents is randomly selected.
The selected agent becomes out of order with the
probability of 90% in 1800 seconds. When the
concentrated selection rule of agents is applied, the
top manager agent (the manager agent of UMAS 0) is
selected with the probability of 10% and one of the
other agents is randomly selected if the top agent is
not selected. We expect that the concentrated
selection rule affects the centralized algorithm.
Table 3: Simulation settings.
# of Disaster Events
# of Causes of Future Agent
Failures per Disaster Event
Interval between Disaster Events
(hours)
Interval between Occurrences of
Causes of Future Agent Failures
in a Disaster Event (secs)
Time from an Occurrence of a
Cause to the Agent Failure (secs)
Prob. of Agent Failures when the
Causes Are Not Removed (%)
10 30 1 1 1800 90
Table 4: Selection rules of agents.
Random Selection
Rule of Agents
Concentrated Selection Rule
of Agents
One agent is
randomly selected.
The top manager agent is
selected with the prob. of 10%
and one agent is randomly
selected otherwise.
5 SIMULATION RESULTS
This section shows the simulation results. We
conducted simulations 1000 times using different
random seeds for each algorithm and for each
selection rule of agents. We show the results in terms
of the number of agent failures and successful repairs.
This section is composed of two subsections. In 5.1,
we show the simulation results when using the
random selection rule of agents. In 5.2, we show the
simulation results when using the concentrated
selection rule of agents.
5.1 When using the Random Selection
Rule of Agents
This subsection shows the simulation results when
using the random selection rule of agents. Figure 4
shows the average number of agent failures and
Figure 5 shows the average number of successful
repairs. Reducing agent failures is the top priority but
it depends on successful repairs.
The centralized algorithm and the distributed
algorithm are much better than the independent unit
MAS algorithm because each cause of future agent
failure is allocated to a unit MAS in the centralized
algorithm and the distributed algorithm, which is not
the case with the independent unit MAS algorithm.
These two algorithms become much better when
Comparing Repair-Task-Allocation Strategies in MAS
23

combined with a replanning capability because
replanning covers unsuccessful repair actions.
The distributed algorithm with/without
replanning is better than the centralized algorithm
with/without replanning. However, the difference is
slight. We expect that the difference would become
bigger after the top manager agent becomes out of
order. Therefore, in the next subsection, we focus on
use of the concentrated selection rule of agents to
increase the possibility of a failure of the top manager
agent.
Figure 4: Average number of agent failures when using the
random selection rule of agents.
Figure 5: Average number of successful repairs when using
the random selection rule of agents.
Figure 6 shows the probabilities of each algorithm
getting the best results in terms of the numbers of
agent failures. The sum of the probabilities is more
than 100 % because multiple algorithms can get the
best result in a trial. Unlike Figure 4, Figure 6 clearly
indicates that the distributed algorithm with
replanning is the best choice and the centralized
algorithm with replanning is the second best choice.
Figure 6: Probability of getting the best result in terms of
the number of agent failures when using the random
selection rule of agents.
5.2 When using the Concentrated
Selection Rule of Agents
This subsection shows the simulation result when
using the concentrated selection rule of agents. Figure
7 shows the average number of agent failures and
Figure 8 shows the average number of successful
repairs.
Now, the differences between the centralized
algorithm with/without replanning and the distributed
algorithm with/without replanning are clear. The
distributed algorithm without replanning becomes
better than the centralized algorithm without
replanning from the second disaster event. The
distributed algorithm with replanning becomes better
than the centralized algorithm with replanning from
the fifth disaster event. This is because the centralized
algorithms work in the same way as the independent
unit MAS algorithm after the failure of the top
manager agent.
Figure 7: Average number of agent failures when using the
concentrated selection rule of agents.
0
20
40
60
80
100
12345678910
#ofAgentFailures
#ofDisasterEvents
Independent
UnitMAS
Distiributed
Centralized
Distiributedwith
replanning
Centralizedwith
replanning
0
50
100
150
200
250
12345678910
#ofSuccessfulRepairs
#ofDisasterEvents
Independent
UnitMAS
Distiributed
Centralized
Distiributedwith
replanning
Centralizedwith
replanning
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Prob.ofGettingtheBestResults
(#ofAgentFailures)
0
20
40
60
80
100
12345678910
#o
f
AgentFaii
l
ures
#ofDisasterEvents
Independent
UnitMAS
Distiributed
Centralized
Distiributedwith
replanning
Centralizedwith
replanning
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
24

Figure 9 shows the probabilities of getting the best
results in terms of the numbers of agent failures.
Figure 9 clearly indicates that the distributed
algorithm with replanning is the best choice.
Figure 8: Average number of successful repairs when using
the concentrated selection rule of agents.
Figure 9: Probability of getting the best result in terms of
the number of agent failures when using the concentrated
selection rule of agents.
6 DISCUSSION
As mentioned in the introduction, some repair-task-
allocation algorithms are compared in (Beaumont and
Chaib-draa 2007), including a no-coordination
algorithm (≒ independent unit MAS algorithm), a
zone defence coordination algorithm, a contract net
algorithm, a simple centralized coordination
algorithm, and another central coordination algorithm
of (Brown and Lane 2001). In their simulation results,
the no-coordination algorithm gives the best result in
terms of the number of hits (≒successful repairs).
Note that the independent unit MAS algorithm (≒no-
coordination algorithm) always produces the worst
results in our simulation results.
This is mainly because the total number of threats
(≒causes of future agent failures) is small (1 to 10)
in the scenario of (Beaumont and Chaib-draa 2007).
This is also because each ship (≒unit MAS) tries to
remove all the threats using many resources in the no-
coordination algorithm whereas each threat is
assigned to only one ship in the other algorithms and
replanning is not an option even when it fails to
remove the threat.
On the other hand, in our simulation scenario, 10
disaster events repeatedly happen, each disaster event
creates 30 causes of future action failures, and the
total number of causes of future agent failures is 300.
In this case, the unit MASs cannot remove all the
causes of future agent failures without coordination.
Also, in the independent unit MAS algorithm that
uses many resources, unit MASs soon run out of
resources at early stages and cannot continue
repairing afterwards. Therefore, in our much severer
disaster scenario, the independent unit MAS
algorithm is the worst choice and coordination among
unit MASs is vital. This is completely different from
the simulation result of (Beaumont and Chaib-draa
2007) where they never run out of resources.
In addition, we found that replanning is very
effective in this severe situation. Furthermore, we
confirmed that in our simulation scenario, the
distiributed algorithm is better than the centralized
algorithm and especially so when the concentrated
selection rule is applied.
Because different scenarios might lead to
different conclusions, it is important to conduct
simulations considering our target applications in
more detail. It is also important to evaluate more
algorithms considering other situations such as
network delay. We need to tackle these challenges as
the next step.
7 CONCLUSIONS
In this paper, we evaluated and compared five
algorithms for repair-task allocations in MASs that
consist of multiple unit MASs by means of multi-
agent simulation: the independent unit MAS
algorithm, the centralized algorithm, the distributed
algorithm, the centralized algorithm with replanning,
and the distributed algorithm with replanning. We
used severe simulation scenarios where causes of
future agent failures are created simultaneously and
consecutively. We conducted simulation 1000 times
for each case and algorithm and confirmed the
0
50
100
150
200
250
12345678910
#ofSuccessfulRepairs
#ofDisasterEvents
Independent
UnitMAS
Distiributed
Centralized
Distiributedwith
replanning
Centralizedwith
replanning
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Prob.ofGettingtheBestResults
(#ofAgentFailures)
Comparing Repair-Task-Allocation Strategies in MAS
25

following in terms of the average number of agent
failures and successful repairs:
The centralized algorithm and the distributed
algorithm are always better than the
independent unit MAS algorithm in our
simulation scenarios, which means that
cooperation between unit MASs is very
effective. This conclusion is completely
different from the simulation results reported
in (Beaumont and Chaib-draa 2007). This is
because much more severe disasters are
considered in our simulation scenarios
where causes of future agent failures are
created simultaneously and consecutively.
The centralized algorithm and the distributed
algorithm become even better when
combined with replanning, which means that
replanning is very effective in our simulation
scenarios where repair actions sometimes
fail.
The distributed algorithm with/without
replanning is better than the centralized
algorithm with/without replanning when the
random selection rule is applied although the
difference is slight. However, the distributed
algorithm with/without replanning becomes
much better than the centralized algorithm
with/without replanning when the
concentrated selection rule is applied. This
means that the distributed algorithm is
effective for unbalanced occurrences of
future agent failures and the centralized
algorithm is not robust when the top
manager agent is vulnerable.
In summary, the distributed algorithm
with replanning is always the best and the
independent unit MAS algorithm is always
the worst in our severe simulation scenarios
where hundreds of causes of future agent
failures are created.
We also evaluated the algorithms from the view
point of “the probabilities of getting the best results
in terms of the numbers of agent failures” and
confirmed the following:
The distributed algorithm with replanning is
clearly the best choice in any case in our
simulation scenarios.
The centralized algorithm with replanning is
clearly the second best choice when the
random selection rule of agents is applied.
In future work, we intend to consider the
following two directions:
We intend to evaluate the algorithms in more
detail in our target application. For this
purpose, we need to combine the MAS
controller of our algorithms and the domain-
specific simulator of our target application.
We intend to evaluate more algorithms
considering other situations. For example,
sometimes the network speed between
manager agents of different unit MASs
might slow or the network might be cut off.
In another example, the human manager of
the unit MAS might correct the allocation of
repair actions that the manager agent
recommends.
REFERENCES
Beaumont, P. and Chaib-draa, B. “Multi-platform
Coordination in Command and Control." In
Proceedings of the International Command and
Control Research and Technology Symposium, 2004.
Beaumont, P. and Chaib-draa, B. “Multiagent Coordination
Techniques for Complex Environments: the Case of a
Fleet of Combat Ships.” IEEE Transaction on Systems,
Man and Cybernetics-Part C, 37(3), pp. 373-385, 2007.
Brown, C., and Lane, D. “Anti-Air Warfare Co-ordination
- An Algorithmic Approach.” In Proceedings of the
International Command and Control Research and
Technology Symposium, 2000.
Brown, C., Fagan, P., Hepplewhite, A., Irving, B., Lane, D.,
and Squire, E. “Real-time Decision Support for the
Anti-air Warfare Commander.” In Proceedings of the
International Command and Control Research and
Technology Symposium, 2001.
Chapman, A., Micillo, R. A., Kota, R. and Jennings, N. R.
"Decentralised Dynamic Task Allocation: A Practical
Game-theoretic Approach." In Proceedings of the
International Conference on Autonomous Agents and
Multiagent Systems, pp. 915–922, 2009.
Choi, H.-L., Brunet, L., and How, J. P. “Consensus-Based
Decentralized Auctions for Robust Task Allocation.”
IEEE Transactions on Robotics 25(4), pp. 912-926,
2009.
Dawe, M. "Beyond the Kung-Fu Circle: A Flexible System
for Managing NPC Attacks.” In Game AI Pro:
Collected Wisdom of Game AI Professionals, Chapter
28, pp.369-375, 2013.
dos Santos, F. and Bazzan, A. L. C. “Towards Efficient
Multiagent Task Allocation in the RoboCup Rescue: a
Biologically-Inspired Approach.” Autonomous Agents
and Multi-Agent Systems, 22 (3), pp. 465-486, 2011.
Guessoum, Z, Briot, J. P., Faci, N., and Marin, O.
“Toward Reliable Multi-Agent Systems: an Adaptive
Replication Mechanism.” Multiagent and Grid Systems,
6(1), pp. 1-24, 2010.
Macarthur, K. S., Stranders, R., Ramchurn, S. D. and
Jennings, N. R. “A Distributed Anytime Algorithm for
Dynamic Task Allocation in Multi-Agent Systems.” In
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
26

Proceedings of the AAAI Conference on Artificial
Intelligence, pp. 701-706, 2011.
Mi, Z., Yang, Y., Ma, H., and Wang, D. “Connectivity
Preserving Task Allocation in Mobile Robotic Sensor
Network.” In Proceedings of the IEEE International
Conference on Communications, pp. 136-141, 2014.
Nair, R., Ito, T., Tambe, M., and Marsella, S. “Task
Allocation in the Rescue Simulation Domain: a Short
Note.” In RobuCup2001, LNAI 2377, Springer, pp.
751-754, 2002.
Okimoto, T., Schwind, N., Clement, M., Riberio, T., Inoue,
K., and Marquis, P. “How to Form a Task-Oriented
Robust Team.” In Proceedings of the International
Conference on Autonomous Agents and Multiagent
Systems, pp. 395-403, 2015.
Pujol-Gonzalez, M., Cerquides, J., Farinelli, A., Meseguer,
P., and Rodriguez-Aguilar, J. A. “Efficient Inter-Team
Task Allocation in RoboCup Rescue.” In Proceedings
of the International Conference on Autonomous Agents
and Multiagent Systems, pp. 413-421, 2015.
Rahimzadeh, F., Khanli, L. M., and Mahan, F. “High
Reliable and Efficient Task Allocation in Networked
Multi-Agent Systems.” Autonomous Agent and Multi-
agent Systems, 29(6), pp.1023-1040, 2015.
Ramchurn, S. D., Farinelli, A., Macarthur, K. S., and
Jennings, N. R. “Decentralized Coordination in
RoboCup rescue.” The Computer Journal, 53(9):1447–
1461, 2010.
Ramchurn, S. D., Wu, F., Jiang, W., Fischer, J. E., and
Reece, S., Roberts, S., Rodden, T., Greenhalgh, C., and
Jennings, N. R. "Human–agent Collaboration for
Disaster Response." Autonomous Agents and Multi-
Agent Systems, 30 (1). pp. 82-111, 2016.
Smith, R. G. “The Contract Net Protocol: High-level
Communication and control in a Distributed Problem
Solver.” IEEE Transactions on Computers, C-29(12),
pp. 1104-1113, 1980.
Straatman, R., Verweij, T., Champandard, A., Morcus, R.,
and Kleve, H. “Hierarchical AI for Multiplayer Bots in
Killzone 3.” Game AI Pro: Collected Wisdom of Game
AI Professionals, Chapter 29, pp.377-390, 2013.
Suárez, S., Quintero, C., and de la Rosa, J. L. “Improving
Tasks Allocation and Coordination in a Rescue
Scenario.” In Proceedings of the European Control
Conference, pp. 1498-1503, 2007.
Vallejo, D., Remagnino, P., Monekosso, D. N., Jiménez, L.,
and González, C. “A Multi-Agent Architecture for
Multi-robot Surveillance.” In Proceedings of the IEEE
International Symposium on Parallel and Distributed
Processing with Applications, pp. 11-18, 2009.
Young, B. W. “Future integrated Fire Control.” In
Proceedings of the International Command and
Control Research and Technology Symposium, 2005.
Comparing Repair-Task-Allocation Strategies in MAS
27
