An Efficient Geometric Algorithm for Clipping and Capping Solid
Triangle Meshes
Aaron Scherzinger, Tobias Brix and Klaus H. Hinrichs
Department of Computer Science, University of M
¨
unster, M
¨
unster, Germany
Keywords:
Clipping, Two-Manifold Triangle Meshes, Geometry Processing.
Abstract:
Clipping three-dimensional geometry by arbitrarily oriented planes is a common operation in computer graph-
ics and visualization applications. In most cases, the geometry used in those applications is provided as surface
models consisting of triangles which are called meshes. Clipping such surface models by a plane cuts them
open, destroying the illusion of a solid object. Often this is not desirable, and the resulting mesh should
again be a closed surface model, e.g., when generating cross-sections in technical visualization applications.
We propose an algorithm which performs the clipping operation geometrically for a given input mesh on the
GPU. The intersection edges of the mesh and the clipping plane are then transferred to the CPU, where a cap
geometry closing the mesh is computed and eventually added to the clipped mesh. Our algorithm can process
solid (i.e., closed two-manifold) triangle meshes, or sets of non-intersecting solids, and has a worst-case run-
time of O(N + nlogn) where N is the number of triangles in the input geometry, and n is the number of input
triangles intersecting the clipping plane.
1 INTRODUCTION
In computer graphics and visualization, applying clip-
ping planes to a given geometry is a standard oper-
ation. It is usually implemented in rendering sys-
tems and application programming interfaces (APIs),
as clipping geometric objects against the planes of a
viewing frustum is essential for the rasterization pro-
cess. However, for some applications it is desirable to
provide the option of performing additional clipping
operations with user-defined clipping planes. For in-
stance, such functionality is required in technical vi-
sualization like computer-aided design (CAD), or in
medical visualization. Moreover, these application
domains often require interactive frame rates, allow-
ing the user to modify the parameters of the plane in
real-time, while generating high-quality images.
Usually, the geometry used in computer graphics
applications is provided as surface models composed
of triangles which are called meshes. Such meshes
are restricted to surface representations and thus do
not contain any information about the interior of an
object. Clipping such surface models by a plane cuts
them open, and although it might be intentional in
some cases to obtain an open geometry, for several ap-
plication domains it is desirable to maintain the illu-
sion of a solid object, which requires closing the mesh
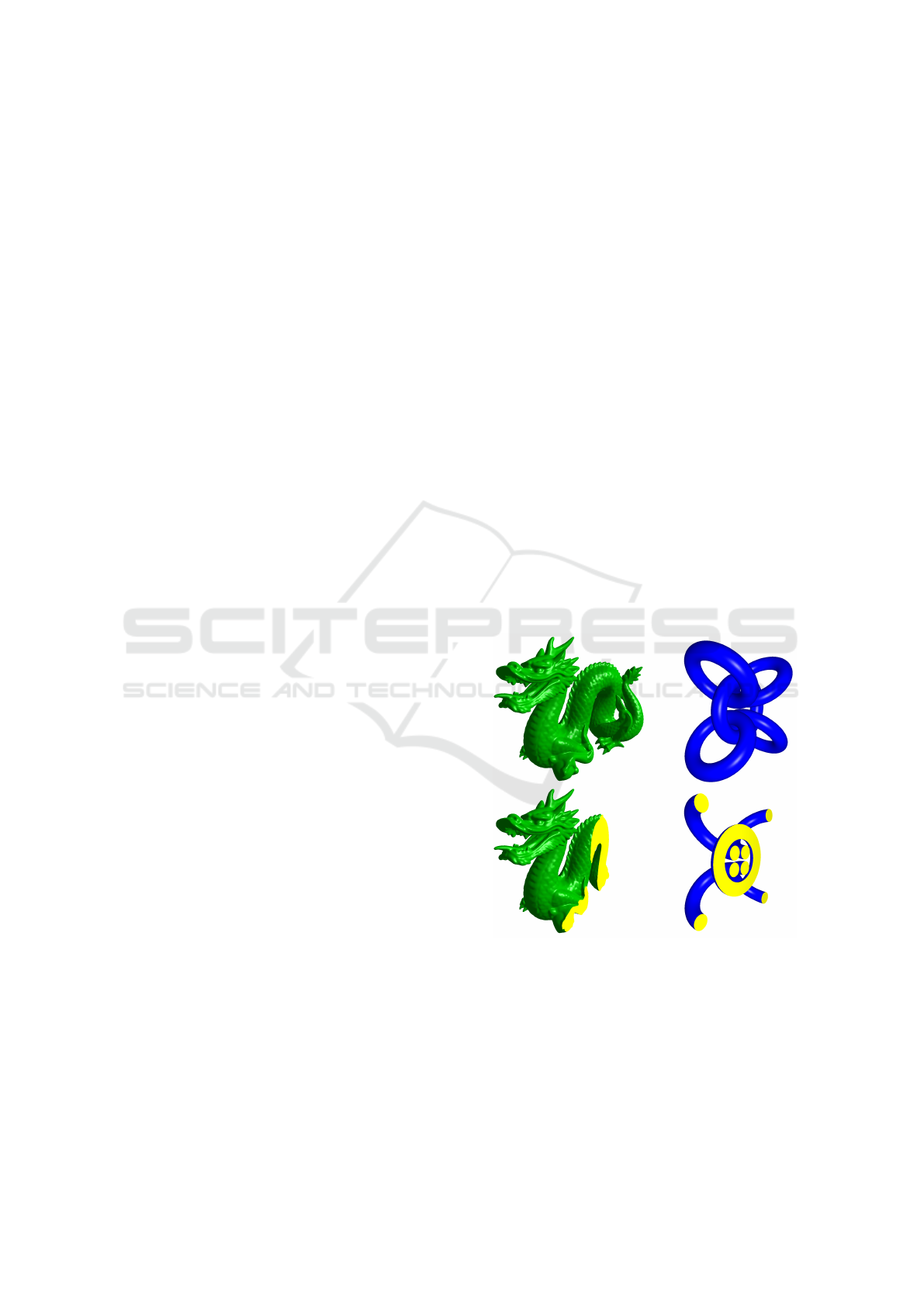
Figure 1: Example of solid-clipping the Stanford dragon
(left) and a test mesh consisting of several tori (right). In
both cases, the closing geometry is highlighted in yellow.
after performing the clipping operation. Especially
in CAD applications, this is a common requirement
when producing cross-sections of solid geometric ob-
jects to resolve spatial occlusion, allowing to examine
the internal structures of assemblies. This process is
referred to as solid-clipping (see Fig. 1). However,
Scherzinger A., Brix T. and H. Hinrichs K.
An Efficient Geometric Algorithm for Clipping and Capping Solid Triangle Meshes.
DOI: 10.5220/0006097201870194
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 187-194
ISBN: 978-989-758-224-0
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
187

Figure 2: In a closed two-manifold triangle mesh, the trian-
gles incident to a vertex form a closed triangle fan and can
be arranged in a cyclic order.
closing a model after performing the clipping opera-
tion requires special effort, as additional faces have to
be created and rendered, and the methods for achiev-
ing this are usually not general, requiring specific data
structures and sophisticated algorithms.
In this paper, we propose an algorithm which
performs the solid-clipping process geometrically for
input meshes that are closed two-manifold triangle
meshes (see Sec. 2). Our algorithm performs the clip-
ping of the input mesh on the GPU. The intersecting
edges between the triangles of the mesh and the clip-
ping plane are then transferred to the CPU, while the
clipped mesh can be kept in graphics memory. From
the set of edges, a cap mesh is computed on the CPU
which closes the clipped mesh. Possible applications
of the algorithm include clipping of meshes for stere-
olithography, CAD applications, and isosurfaces ex-
tracted from volumetric data sets, where Lewiner et
al. (Lewiner et al., 2003) have proposed an extension
to the marching cubes algorithm to guarantee topo-
logical consistency for the resulting surface.
2 FUNDAMENTAL NOTIONS
This section includes some fundamental notions
which will be required in the remainder of the paper.
Definition 1 (Closed Two-Manifold Triangle Mesh).
A finite triangle mesh is called a closed two-manifold
triangle mesh if every edge of the mesh is shared be-
tween exactly two of its triangles, and if for every
vertex of the mesh the triangles incident to the ver-
tex form a closed fan, i.e., the edges e
i
and trian-
gles t
j
incident to the vertex can be arranged in a
cyclic order t
0
, e
0
,t
1
, e
1
, . . . ,t
n−1
, e
n−1
without repeti-
tions such that edge e
i
is shared between t
i
and t
i+1
(indices taken mod n). Other than in shared vertices
or edges, there is no intersection of triangles in the
mesh. A triangle mesh that is a closed two-manifold
is also called solid.
An example of the triangle and edge arrangement
around a vertex in Def. 1 is depicted in Fig. 2. In
addition to the constraints given in Def. 1, we assume
Figure 3: The two CCW triangles (v
0
, v
1
, v
2
) and (v
3
, v
2
, v
1
)
are consistently oriented, since the shared edge has orien-
tation v
1
v
2
in the first triangle and orientation v
2
v
1
in the
second triangle.
that the triangles in the mesh are consistently oriented,
which we will define as follows.
Definition 2 (Consistently Oriented Triangle Mesh).
A triangle mesh is called consistently oriented if two
triangles sharing an edge induce opposite directions
on the shared edge.
As a convention, we will assume that the orienta-
tion of each triangle is chosen so that its vertices are
ordered counter-clockwise (CCW) with respect to the
triangle’s front face normal vector, i.e., the direction
of the surface normal of a triangle (v
0
, v
1
, v
2
) is given
by the cross product (v
1
−v
0
)×(v
2
−v
0
). An example
of a consistent orientation is depicted in Fig. 3.
It should be noted that the definition above allows
meshes to consist of multiple unconnected compo-
nents, where some may constitute holes or hollows
within a solid object. While our algorithm is in-
herently able to handle such cases, we assume that
the orientation of the triangles is consistent with the
surface normals when constituting holes and exclude
cases where this condition is not fulfilled (which
would contradict the intuition of modeling solid ob-
jects, since an interior surface representing a hole
would have an outwards normal). An example would
be a solid sphere within a larger solid sphere where
the surface normals of both spheres point to the same
outward direction, which is depicted in Fig. 4(a). This
additional constraint can be formalized as follows.
Definition 3 (Solid Triangle Mesh Constraint).
For each ray R which intersects a consistently ori-
ented two-manifold triangle mesh M holds that it is
either a degenerate case, i.e., R intersects at least one
edge or vertex of a triangle of M, or the set of trian-
gles of M that are intersected by R and ordered along
the direction of R are given by t
0
,t
1
, . . . ,t
k
so that for
each triangle t
i
, i = 2 · m, the angle between the direc-
tion vector of the ray d
R
and the triangle’s normal n
i
is greater than 90
◦
, i.e., d
R
· n
i
< 0, while for each tri-
angle t
j
, j = 2 · m + 1, the angle is less than 90
◦
, i.e.,
d
R
· n
i
> 0.
Intuitively, the above constraint corresponds to the
idea that a ray intersecting the geometry will alternate
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
188
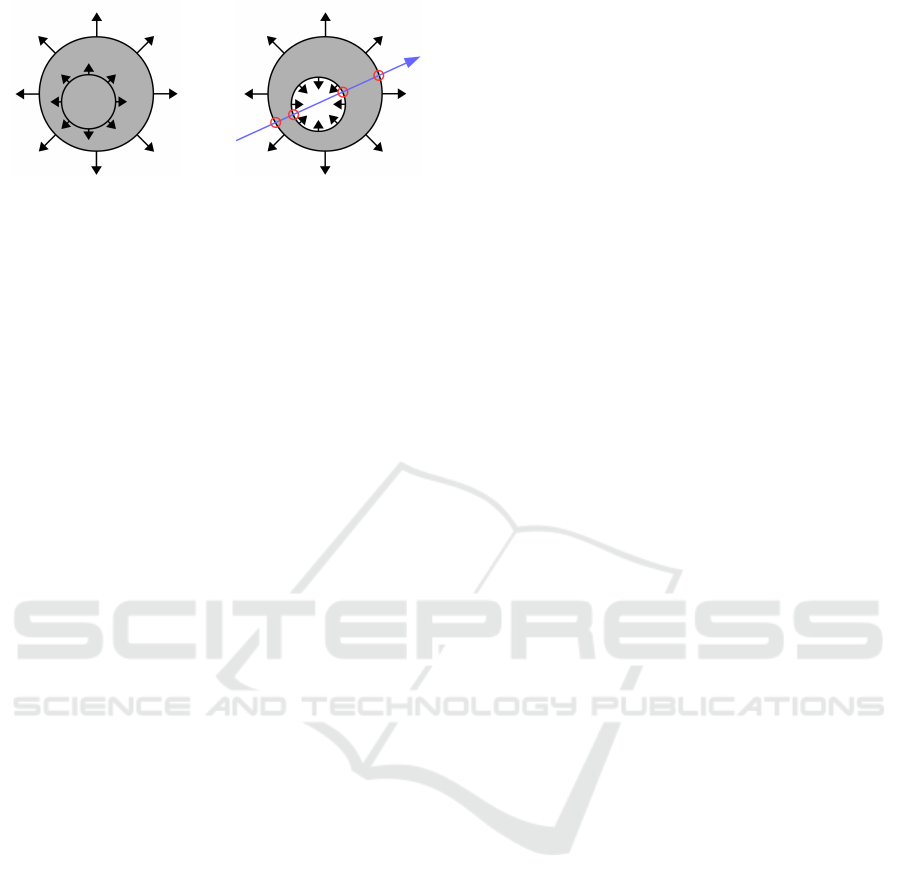
(a) Example of two solids
stacked into each other.
The surface normals are
depicted by arrows.
(b) A ray intersecting a
solid alternates between
being outside of the solid
and within the solid.
Figure 4: Solid modeling constraints.
between being outside of the solid and being inside
the solid each time it intersects the surface given by
the triangles of the mesh (see Fig. 4(b)). If this as-
sumption holds, cases such as in Fig. 4(a) can also
be handled by the algorithm when introducing an ad-
ditional processing step without changing the overall
asymptotic runtime (see Sec. 4.4).
3 RELATED WORK
Several approaches to realize solid-clipping have been
proposed. Probably the most common method is
an image-based technique which utilizes the stencil
buffer of the graphics hardware to render additional
geometry, thus conveying the impression of solid ob-
jects (McReynolds and Blythe, 2005). This approach
is often referred to as capping, and the geometric ob-
jects embedded in the clipping plane which are ren-
dered additionally to close the mesh are called cap
polygons. For technical visualization, other image-
based techniques have been proposed, such as the in-
teractive view-dependent cutaway rendering by Burns
and Finkelstein (Burns and Finkelstein, 2008). Trapp
and D
¨
ollner (Trapp and D
¨
ollner, 2013) have proposed
a technique which allows the use of more complex
clipping surfaces by applying an offset map to the
plane. Despite the fact that capping techniques allow
to efficiently render images of the clipped objects, a
general drawback is that they only construct the cap
polygons in image space and do not allow to retrieve
a clipped and closed version of the surface model for
further geometric computations.
An alternative approach which solves the prob-
lem of solid-clipping geometrically is the use of con-
structive solid geometry (CSG), which provides a set
of operations on boundary representations (b-reps) of
the geometry (Foley et al., 1996). While providing a
flexible and general toolbox for geometry processing,
those methods often require a specific representation
of the geometric objects explicitly storing topological
information such as the winged-edge data structure or
similar representations.
Weiskopf et al. (Weiskopf et al., 2003) have pro-
posed a technique for interactive clipping of volumet-
ric data sets in texture-based volume rendering ap-
plications. Using volumetric representations of both
the input geometry and the clipping objects, voxel-
based methods provide a lot of flexibility regarding
the shape of the clipping objects and allow to re-
trieve the new geometry after performing the clipping
process. Unfortunately, in order to apply these tech-
niques to a triangle mesh, they require the input mesh
to be converted to a voxel representation via a vox-
elization method such as the ones proposed in (Huang
et al., 1998) or (Schwarz and Seidel, 2010). Addition-
ally, if a surface model representation of the clipped
geometry is required afterwards for further process-
ing, the obtained voxel representation has to be con-
verted back again after performing the clipping.
Erleben and Henriksen (Erleben and Henriksen,
2006) have proposed a geometric algorithm for clip-
ping a solid mesh composed of convex faces and
closing the geometry afterwards. However, their ap-
proach requires an input mesh representation similar
to a half-edge data structure. Moreover, the runtime
of their algorithm is O(n
2
), which might be problem-
atic in real-time applications.
We propose a geometric algorithm for interac-
tively clipping solid triangle meshes and subsequently
closing these objects. The output of our algorithm
is again a solid triangle mesh which allows to store
or further process the geometry data after the solid-
clipping operation. Our algorithm does not need any
pre-processing phase to convert the input geometry to
a specific representation as the clipping is performed
on the individual triangles and solves the problem in
a worst-case runtime of O(N +nlog n) where N is the
number of triangles in the input geometry and n is the
number of triangles in the input geometry that actu-
ally intersect the clipping plane. Since the clipping is
performed in parallel on the GPU, the O(N) step can
be computed efficiently in practice.
4 PROPOSED ALGORITHM
4.1 Workflow
An overview of the workflow for our proposed
method is depicted in Fig. 5. First, the clipping of
the input mesh against a plane is performed in parallel
for each individual triangle on the GPU (see Sec. 4.2).
We use OpenGL’s transform feedback functionality to
An Efficient Geometric Algorithm for Clipping and Capping Solid Triangle Meshes
189
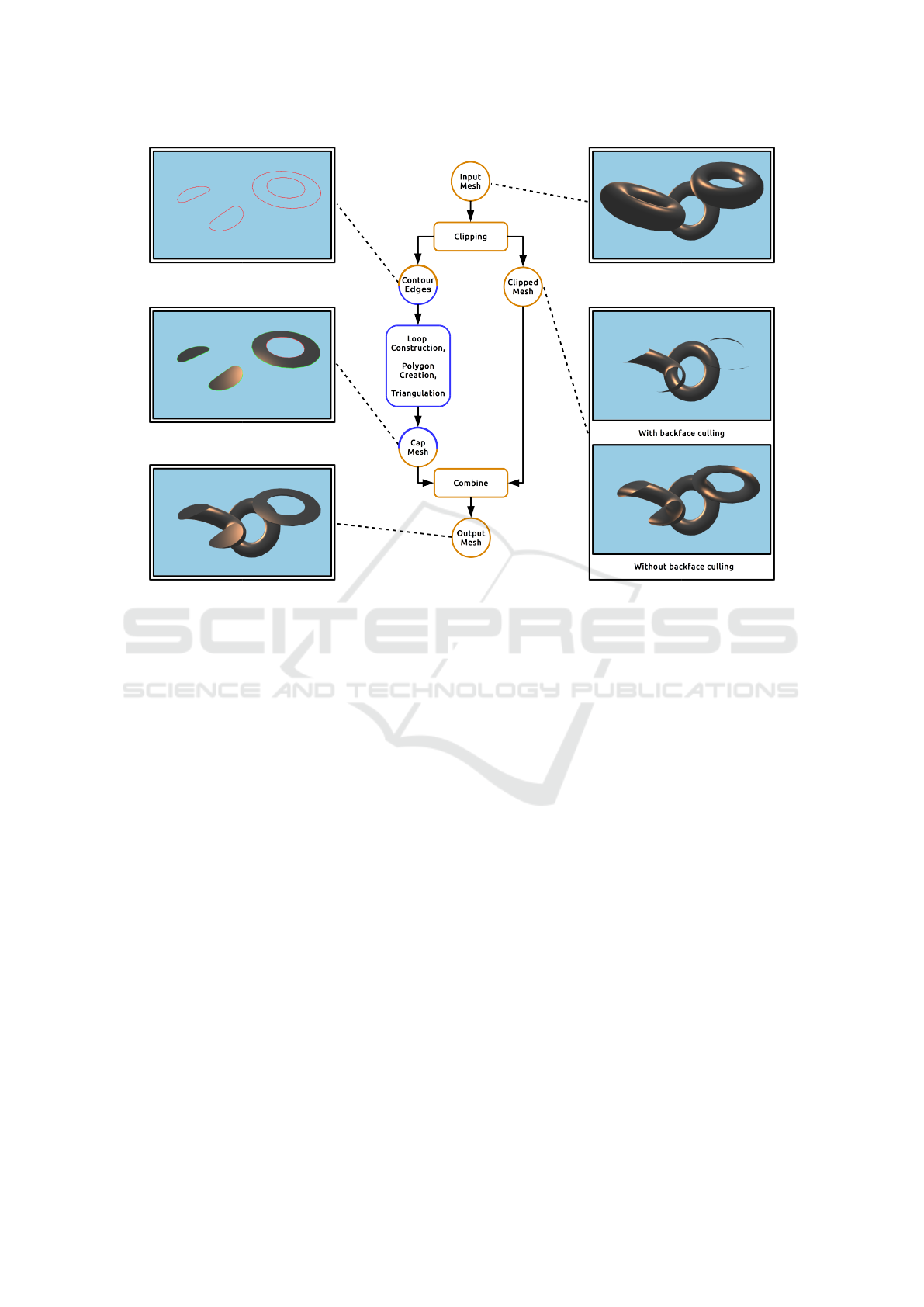
Figure 5: Workflow of our proposed algorithm. Boxes denote operations of the algorithm while circles correspond to meshes,
which are illustrated by the rendered examples. Operations and data on the GPU are depicted using the orange color while
operations and data on the CPU are depicted in blue. Circles with both colors denote data transfer between CPU and GPU.
retrieve both the clipped mesh as well as the intersec-
tion geometry of the mesh and the clipping plane into
separate buffers. The intersection corresponds to a set
of contour edges which are downloaded to the CPU
for creating the cap mesh while the clipped version of
the input mesh is kept on the GPU.
From the (unordered) set of edges, we then con-
struct a set of loops, i.e., closed polygonal chains
which describe the boundaries of polygonal regions
embedded in the clipping plane (see Sec. 4.3). De-
pending on its orientation, each loop may constitute
either the outer boundary of a polygon or a hole within
such a polygon. In the next step, a hierarchy of the
loops is computed which is then traversed to com-
pute the actual set of polygons (potentially contain-
ing holes) which correspond to the planar geometry
necessary to close the clipped input mesh and thus
correspond to the capping polygons (see Sec. 4.4).
Afterwards, a triangulation of those polygons is per-
formed to construct the actual triangle cap mesh (see
Sec. 4.5). This mesh can then be transferred to GPU
memory and closes the clipped input mesh, so that
their combination constitutes the solid-clipped mesh
which again is a solid triangle mesh. Examples of the
geometries resulting from the different stages of the
workflow are depicted in Fig. 5.
4.2 Clipping
Clipping a triangle against a plane with the normal
n = (n
x
, n
y
, n
z
),
|
n
|
= 1, and (signed) distance d from
the origin computes the intersection of the triangle
with the half-space (x, y, z) · n − d > 0 bounded by the
clipping plane, which can either be the empty set, a
triangle, or a quadrilateral (which can be decomposed
into two triangles). It should be noted that we define
the half-space as being strictly positive which avoids
special cases like triangles lying exactly in the clip-
ping plane or the existence of degenerated triangles
after the clipping operation.
We assume that an input mesh is given as a GPU
representation for rendering, e.g., an OpenGL buffer
object, and compute the intersection of the triangle
and the positive half-space using a geometry shader.
The implementation relies on the GPU triangle clip-
ping method proposed by McGuire in (McGuire,
2011), which is based on an algorithm proposed by
Sutherland and Hodgman (Sutherland and Hodgman,
1974). For triangles, their method can be reduced to a
few specific cases which are depicted in Fig. 6. Trian-
gles can either be discarded or completely retained, or
have to be clipped against the plane (cases (3) and (4)
in Fig. 6). When clipping a triangle, two vertices v
0
1
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
190

Figure 6: Examples of the four cases that may occur when
a triangle is clipped against a plane. In case (1), the whole
triangle is retained, while in case (2), it is completely dis-
carded. In the other two cases the triangle is actually
clipped, resulting in a quadrilateral in case (3) and in a tri-
angle in case (4). The arrow represents the direction of the
plane normal.
and v
0
2
corresponding to the intersection of two edges
of the triangle and the clipping plane are computed
using linear interpolation along the triangle’s edges to
construct either a quadrilateral or a triangle. For the
actual shader code, we refer to the triangle clipping
listing in McGuire’s paper. When clipping a trian-
gle, we linearly interpolate the vertex attributes such
as colors, normals, or texture coordinates between the
original vertices in the same way as the vertex posi-
tions. If the clipping operation yields a quadrilateral
(case (3) in Fig. 6), we decompose it into two triangles
with consistent orientation. As stated above, degener-
ated triangles are avoided by the convention of using
the strictly positive half-space.
When a triangle is clipped against the plane, the
two vertices v
0
1
and v
0
2
form an edge which is em-
bedded in the clipping plane and corresponds to the
intersection of the plane and the triangle. The geome-
try shader writes those edges and the clipped triangles
into different output streams, storing the clipped mesh
and the intersection edges in separate buffer objects.
While we retain the original orientation of the clipped
triangles, we invert the direction of the intersection
edges so that a polygon constructed from those edges
is consistently oriented to the clipped input mesh.
Since we compute the clipping operation on the
GPU, the triangles can be processed very efficiently in
parallel. However, if the mesh is not already present
on the GPU or should not be uploaded for later ren-
dering, the clipping can also be performed on the CPU
by processing the individual triangles sequentially in
O(N) time. It should be noted that a trivial upper
bound for the number n of triangles that intersect the
plane, which corresponds to the number of intersec-
tion edges, is O(N), although in practice the num-
ber of edges is usually much smaller than the overall
number of triangles N.
4.3 Loop Construction
After performing the GPU clipping operation, we
download the intersection edges to the CPU while
keeping the triangles of the clipped mesh in graph-
ics memory. Due to the parallelity of the clipping
operation and the potentially random order of trian-
gles in the input mesh, the list of edges is not given in
any specific order. For a closed two-manifold triangle
mesh, the set of intersection edges always constitutes
a set of closed loops for which is guaranteed that the
loops are not self-intersecting and that there are no
intersections between different loops.
Theorem 1.
The intersection of a plane P and a finite consistently
oriented closed two-manifold triangle mesh M is ei-
ther the empty set, or a finite set of edges embedded
in P, which form one or more closed loops without
self-intersections. No pair of two edges contained in
different loops intersects.
Proof. Let S be the set of edges that resulted from clip-
ping M against P. Since each edge s ∈ S is the inter-
section of a triangle T ∈ M and the plane P, it has to
be embedded in P, i.e., s ⊂ P. The rest of the proof
consists of two parts.
(i) For each clipping edge s = pq, s ∈ S, a successor
edge s
0
= qr, s
0
∈ S, can be found.
Let A = (v
0
, v
1
, v
2
), A ∈ M, be a triangle for
which at least one of its vertices v ∈ {v
0
, v
1
, v
2
}
lies in the positive half-space bounded by P, and
at least one of its vertices w ∈ {v
0
, v
1
, v
2
}, w 6= v,
lies in the negative half-space. Then the inter-
section of P and A constitutes a line segment
s ∈ S, s = pq, where p and q are the intersec-
tions of two edges e, f of A and P. W.l.o.g. let q
be the intersection point of e and P.
Because of the characteristics of a consistently
oriented two-manifold triangle mesh, there ex-
ists exactly one triangle B ∈ M, B 6= A , which
shares the edge e with A. Then the intersection
of B and P also constitutes a line segment with
q as one of its endpoints. Because of the consis-
tent orientation, the edge e is inversely directed
in B compared to A and thus s
0
has to be directed
from q to a point r, i.e., s
0
= qr.
Since for each clipping edge s a successor s
0
can be
found and the mesh is finite, each edge is contained
in a closed loop. The second part of the proof now
considers the intersections between line segments.
(ii) Except for two consecutive edges in a loop,
which intersect in their common endpoint, no
pair of two edges e, f ∈ S, e 6= f , intersect.
An Efficient Geometric Algorithm for Clipping and Capping Solid Triangle Meshes
191

Each edge s ∈ S is the intersection of a trian-
gle T ∈ M and P, which implies s ⊆ T . Let
A, B ∈ M, A 6= B be two triangles that intersect
the plane, and let e, f ∈ S, e 6= f be the two cor-
responding intersection edges with the plane P.
Then e ∩ f 6=
/
0 ⇒ A ∩ B 6=
/
0, and if this is true,
one of two cases has to apply:
(1) A and B share a common edge, which inter-
sects P as in (i), and e and f are consecutive
edges of a loop. X
(2) M is not a two-manifold triangle mesh, as it
is self-intersecting.
Since no pair of line segments is intersecting, except
for the consecutive edges of a loop, and every edge is
contained in a closed loop, Thm. 1 is correct.
It should be noted that the orientation of the re-
sulting loops is consistent with the mesh, meaning
that a loop is CCW regarding the inverted normal of
the clipping plane, i.e., the actual surface normal of
the resulting cap polygon, if it constitutes the outer
boundary of a polygon, and clockwise (CW) if it con-
stitutes a hole. This follows directly from the con-
vention we have chosen for the triangle orientation of
the consistently oriented mesh, and the fact that the
orientation of the edges retrieved from the clipping
process is consistent with the clipped triangles of the
input mesh. This property will be relevant for the sub-
sequent steps presented later on.
Now that the existence of loops in the set of edges,
and the membership of each edge in one of the loops,
has been established, the loop construction algorithm
will be outlined. Basically, the algorithm starts to cre-
ate a new loop by picking an arbitrary edge from the
set of contour edges. Afterwards, it searches for its
successor in the set of edges, i.e., for an edge that has
a start vertex with a position identical to that of the
end vertex of the current edge, and appends it to the
loop. If the end vertex of the new edge closes the loop,
the process is started again with one of the remaining
edges and a new loop. Otherwise, the new edge be-
comes the current edge, for which a successor has to
be found. The process is repeated until no edge is left
that is not already part of a loop. To reduce the search
time for a successor, in a first step the algorithm sorts
the edges lexicographically in ascending order with
respect to the position of their start vertices. This al-
lows to perform binary search to find an edge by its
start vertex position. Algorithm 1 shows the complete
loop construction procedure.
Since Thm. 1 states that the number of edges is
finite, each edge has a successor, and every loop is
closed, the algorithm eventually terminates, as it ex-
amines each edge exactly once before appending it to
Algorithm 1: Loop Construction.
Input: Vector<Edge> edges
Output: List<Loop> loops
LexicographicSortByStartPosition(edges)
while edges not empty do
Loop l = new empty Loop
Edge currentEdge = edges.front()
l.append(currentEdge.start)
edges.erase(currentEdge)
while currentEdge.end.position 6=
l.front().position do
Edge next =
findSuccessor(edges,currentEdge)
currentEdge = next
l.append(currentEdge.start)
edges.erase(currentEdge)
loops.append(l)
a loop and removing it from the input list. If the lex-
icographical sorting is implemented by inserting all
edges into a balanced tree (e.g., an AVL tree), the algo-
rithm has a worst case time complexity of O(mlog m)
for m input edges. This upper bound can be estab-
lished by analyzing the actions the algorithm takes for
each edge:
1. Each edge is selected by either using front
(which selects the first edge in the list, i.e., left-
most element in the tree), or findSuccessor. In
an AVL tree, both of these operations can be exe-
cuted in O(logm) time.
2. Each edge is erased from the tree, which takes
O(logm) time.
3. Each edge is appended to the end of a list (i.e., the
current loop), which can be realized in O(1) time.
Since each edge is only handled once and is directly
erased from the tree afterwards, processing an edge
takes O(log m) time. All of the m edges are thus pro-
cessed in O(m logm) time. Inserting the edges into
the tree at the start also takes O(m logm) time. The
complete loop construction algorithm runs therefore
in O(mlog m) time. Since the number m of edges cor-
responds to the number n of triangles intersecting the
clipping plane, this can also be written as O(nlogn).
4.4 Polygon Creation
For convenience, we transform all of the edges, i.e.,
their vertices, into the xy-plane for the next two steps,
which allows us to perform the polygon creation and
triangulation steps in R
2
. This can be realized by a
rotation matrix which can be computed from the clip-
ping plane normal. Optionally, an additional trans-
lation and scaling of the vertices can be performed
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
192

Figure 7: The contour A corresponds to the outer boundary
of a polygon, while the contours B and C correspond to
holes in that polygon. The contour D is nested within a hole
and corresponds to a new polygon.
to normalize the coordinates. It should be noted that
along with the projected vertices, we retain the origi-
nal vertex positions in R
3
which will be used for the
output mesh to avoid numerical issues that might arise
from transforming the vertices back and forth.
Since some of the loops reconstructed from the set
of edges may constitute the outer contours of poly-
gons while others may correspond to holes within
those polygons, we need to compute the hierarchical
ordering of the loops, which is called polygon nest-
ing (see Fig. 7). Note that not all contours have to be
nested in a single hierarchy. Instead, there may exist
several trees like the one in the example, which form
a forest of trees. Such a forest always exists and the
hierarchical ordering is unambiguous, since no inter-
sections between two different loops exist. Each loop
is thus either the root of a tree or has a parent loop
which completely contains it. Moreover, each root
corresponds to the outer contour of a polygon, since
the outermost loop cannot constitute a hole.
Due to the characteristics of a consistently ori-
ented solid triangle mesh and the additional constraint
given in Def. 3, each contour at the root of a tree as
well as each contour with an even number of prede-
cessors has a CCW orientation and corresponds to the
outer boundary of a polygon, while each contour with
an uneven number of predecessors has a CW orienta-
tion and corresponds to a hole. This becomes appar-
ent when examining rays intersecting the geometry as
in Def. 3 which lie in the clipping plane. Each of those
rays alternates between the outside and the inside of
the solid each time it crosses one of the edges.
To efficiently compute the polygon nesting struc-
ture, we apply the algorithm proposed by Bajaj and
Dey (Bajaj and Dey, 1990). Their method computes
the hierarchy of the polygons in O(k + (l + r) log(l +
r)) where k is the number of input vertices of the poly-
gons, l is the number of polygons, and r is the num-
ber of reflex vertices, i.e., vertices with an inner an-
gle > 180
◦
, in the set of vertices. Since l and r are
much smaller than k, the algorithm runs faster than
O(k logk) in practice. It should be noted that the num-
ber k of vertices equals the number n of contour edges,
so that the runtime of the algorithm is in O(nlogn).
First, the algorithm breaks all of the loops
into subchains, i.e., it partitions each loop into x-
monotone sequences of vertices, which can be done in
O(k) time. These subchains are sorted lexicographi-
cally by their endpoints from left to right. The al-
gorithm then performs a plane sweep using a sweep
line L while maintaining the vertical ordering O of
the subchains induced by L. The sweep line stops at
each endpoint of a subchain and updates the ordering
O to determine the parent of each loop. The output
of the algorithm is a directed acyclic graph G which
contains a node for each loop L and corresponds to the
nesting structure of the contours. For details about the
algorithm, we refer the reader to the original paper by
Bajaj and Dey. After computing the nesting structure,
it can easily be traversed to extract each individual
polygon together with its holes. During this traver-
sal, an additional step could be integrated to correct
the orientation of inner loops corresponding to holes
when dealing with cases such as the one depicted in
Fig. 4(a) (see Sec. 2) by inverting the orientation of
the loops at each other level of the hierarchy, pro-
ducing an alternating CCW-CW order in the sequence
of levels of the nesting structure. This only requires
O(n) additional computation time and thus does not
change the overall runtime complexity.
4.5 Triangulation
Polygon triangulation is one of the fundamental prob-
lems in computational geometry. Chazelle was the
first to propose a linear-time algorithm for triangu-
lation of simple polygons (Chazelle, 1991). How-
ever, his method does not seem to be applicable in
practice. Instead, usually one of several existing
O(k logk) (where k is the number of input vertices)
methods for polygon triangulation is applied. Here,
we use a two-step method which consists of partition-
ing the polygon into y-monotone pieces in O(k logk)
and afterwards triangulating each of the pieces in
O(k) time. The method to partition a polygon into
monotone pieces is due to Lee and Preparata (Lee and
Preparata, 1977) and the linear time algorithm for tri-
angulating a monotone polygon has been proposed by
Garey et al. (Garey et al., 1978). The complete algo-
rithm is summarized in (de Berg et al., 2008).
For the monotone partitioning of the input poly-
gon in the first step, vertices are classified into various
types and sources of non-monotonicity are removed
by adding additional diagonals, splitting the polygon
into monotone pieces. The algorithm performs this
partitioning operation using a plane sweep which has
a runtime complexity of O(k log k), where k is the
number of input vertices. Afterwards, each monotone
An Efficient Geometric Algorithm for Clipping and Capping Solid Triangle Meshes
193

polygon resulting from the previous step can be trian-
gulated in O(k) time by iterating over the vertices in
decreasing y-direction and connecting the left and the
right chain. The overall worst-case runtime of the tri-
angulation step is thus in O(k log k). Again, the num-
ber k of input vertices equals the number n of contour
edges, so that the runtime is in O(nlogn).
Since the orientation of the original edges is re-
tained during triangulation, the cap mesh is consis-
tently orientated with the clipped mesh. If the trian-
gulation is not consistently oriented in itself, this can
easily be corrected using an O(n) scan over the list
of triangles. Moreover, a simple runtime optimization
of the triangulation can be added by testing each poly-
gon for convexity and applying a very simple O(n) tri-
angulation for convex polygons instead of the afore-
mentioned algorithm. However, this does not change
the upper bound of the runtime complexity.
For the set of triangles resulting from the trian-
gulation, the original 3D positions of the vertices (as
computed during clipping) are used instead of the ver-
tex positions transformed into the xy-plane. If the
vertices contain normal vectors, the normal vector at-
tribute for all of the vertices in the cap mesh is set to
the inverted normal of the clipping plane, which cor-
responds to the normal vector of the cut surface. After
finishing the triangulation step for all polygons, the
cap mesh is complete. The output geometry is then
created by combining the cap mesh with the clipped
input mesh (e.g., by uploading the cap mesh to the
GPU). Since each contour edge of the cap mesh is
shared between a triangle of the clipped input mesh
and a triangle of the cap mesh, and the shared edges
induce opposite direction in the meshes due to the
output of the clipping step, the output mesh is a con-
sistently oriented closed two-manifold triangle mesh.
Since the runtime of the clipping step (if not per-
formed in parallel) is O(N) and each subsequent step
of the algorithm is in O(n logn) where n is the num-
ber of triangles intersecting the plane, the algorithm
has an overall worst case runtime of O(N + nlog n).
5 CONCLUSION AND FUTURE
WORK
We have proposed an efficient method for geometri-
cally clipping and capping a closed two-manifold tri-
angle mesh in O(N + n logn). Our method performs
the clipping on the GPU and transfers the contour
edges to the CPU, where the cap mesh is computed to
close the clipped input mesh. One of the drawbacks of
our algorithm is the numerical stability, which might
be problematic particularly in the loop construction.
However, this can be mitigated by using a small ep-
silon as an allowed distance between the end vertex of
an edge and the start vertex of its successor. Another
problem of our method may be the quality of the tri-
angulation in the last step. In future work, we will try
to improve this step by applying constrained Delau-
nay triangulation or use of additional Steiner vertices
to increase the quality of the cap mesh.
REFERENCES
Bajaj, C. L. and Dey, T. K. (1990). Polygon nesting and
robustness. Inf. Proc. Lett., 35(1):23–32.
Burns, M. and Finkelstein, A. (2008). Adaptive cutaways
for comprehensible rendering of polygonal scenes.
ACM Transactions on Graphics, 27(5):154:1–154:7.
Chazelle, B. (1991). Triangulating a simple polygon in lin-
ear time. Discrete & Comput. Geom., 6(5):485–524.
de Berg, M., Cheong, O., van Kreveld, M., and Overmars,
M. (2008). Computational Geometry: Algorithms and
Applications. Springer, 3rd edition.
Erleben, K. and Henriksen, K. (2006). A simple plane
patcher algorithm. Technical Report DIKU-TR-
06/09, Department of Computer Science, University
of Copenhagen.
Foley, J. D., van Dam, A., Feiner, S. K., and Hughes, J. F.
(1996). Computer Graphics: Principles and Practice,
2nd ed. in C. Addison-Wesley.
Garey, M. R., Johnson, D. S., Preparata, F. P., and Tarjan,
R. E. (1978). Triangulating a simple polygon. Inf.
Proc. Let., 7(4):175–179.
Huang, J., Yagel, R., Filippov, V., and Kurzion, Y. (1998).
An accurate method for voxelizing polygon meshes.
In Proceedings of the 1998 IEEE Symposium on Vol-
ume Visualization, VVS ’98, pages 119–126. ACM.
Lee, D. T. and Preparata, F. P. (1977). Location of a point
in a planar subdivision and its applications. SIAM J.
on Computing, 6(3):594–606.
Lewiner, T., Lopes, H., Vieira, A. W., and Tavares, G.
(2003). Efficient implementation of marching cubes’
cases with topological guarantees. J. of Graphics
Tools, 8:2003.
McGuire, M. (2011). Efficient triangle and quadrilateral
clipping within shaders. J. of Graphics, GPU, and
Game Tools, 15(4):216–224.
McReynolds, T. and Blythe, D. (2005). Advanced Graphics
Programming Using OpenGL. Morgan Kaufmann.
Schwarz, M. and Seidel, H.-P. (2010). Fast parallel surface
and solid voxelization on gpus. ACM Transactions on
Graphics, 29(6):179:1–179:10.
Sutherland, I. E. and Hodgman, G. W. (1974). Reentrant
polygon clipping. Comm. of the ACM, 17(1):32–42.
Trapp, M. and D
¨
ollner, J. (2013). 2.5d clip-surfaces for
technical visualization. J. of WSCG, 21(1):89–96.
Weiskopf, D., Engel, K., and Ertl, T. (2003). Interactive
clipping techniques for texture-based volume visual-
ization and volume shading. IEEE Transactions on
Visualization and Computer Graphics, 9(3):298–312.
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
194
